基于邊界元法的潛艇高空磁場特征分析
2023-08-07 09:20:38王學敏劉首善王潁航張欽程
科技創新與應用 2023年22期
吳 芳,王學敏,劉首善,王潁航,張欽程
(1.海軍航空大學,山東 煙臺 264001;2.92697 部隊,海南 陵水 572400;3.91445 部隊,遼寧 大連 116043)
邊界元法是一種在半空間區域基于格林函數,通過標量磁位或矢量磁位分布求拉普拉斯的邊值問題[1]。根據電磁場的基本原理,可將計算潛艇高空磁場分布的問題轉化為求解空間磁位分布的問題。通過計算標量磁位的負梯度或是計算矢量磁位的旋度[2-3],可以得到潛艇目標磁源在空間中的磁場分布情況,該方法具有較高的精度。
反潛機使用磁探儀對水下目標進行探測時,由于距目標較遠,磁探儀接收到的磁異常信號能量將直接影響設備的探測效能。文獻[4]根據邊界元法的基本原理,建立了潛艇磁場的高空預測模型,并對該模型進行了理論驗證。本文基于潛艇磁場的高空預測模型,結合航空磁探儀實際搜潛過程,仿真分析潛艇不同運動航向,以及反潛機不同搜索高度下,潛艇磁場的空間特征。
1 潛艇磁場組成
地球是一個巨大的磁場,潛艇上的大部分設備與材料都是良好的磁化材料,所以潛艇在磁場中極易被磁化,并在其周圍空間產生方向不同、強度各異的磁場。潛艇磁化后的磁場可以分為永久磁場、感應磁場及變化磁場3 個部分[3]。
1.1 永久磁場
潛艇一般都是由高強度的合金鋼制成,屬于鐵磁性材料。在建造潛艇的時候,要經過電焊和鉚接等工藝,會產生磁場。鐵合金含有“磁疇”,每一個磁疇都是一個小的磁體,有南北極。當磁疇無規則排列的時候,會產生一個很小的磁力線圈圖。當把這種含有磁疇的合金放在穩定的磁場中,它的分子會被激勵,在被錘擊和受熱后,磁疇自己趨于定向,形成南北極,使所有磁疇的磁場都得到加強。地球的磁場雖然不是很強,但是潛艇是一個很大的鋼結構體,不可避免地要在地磁場的作用下加工和建造,在這個過程中,材料內部應力的反復變化、溫度的升降變遷及局部磁場的影響,都會引起鐵磁材料內無磁滯磁化的形成,在潛艇建成形成潛艇的永久磁場。由于潛艇的結構很復雜及外形曲面的不規則性,現代消磁技術并不能完全消除掉潛艇的永久磁場,特別是潛艇的縱向永久磁場和垂直方向永久磁場還無法分離。潛艇的磁場有3 個主要的分量:垂直分量、縱向分量、橫向分量。這3 個部分合起來構成了潛艇完整的永久磁場。
1.2 感應磁場
潛艇服役后在地磁場的作用下工作,潛艇各部分的鐵磁材料內部會引起可逆的磁化過程,從而產生潛艇的感應磁特性。潛艇在水下航行時,受波浪和爆炸的沖擊,或者受高速水擊作用等振動后,也會產生感應磁場。由于感應磁場的存在,潛艇在某一緯度海域長期活動,潛艇的固定磁場會慢慢接近某一固定值。但是,當潛艇轉移到另一個磁緯度區航行一段時間后,潛艇的固定磁場就會再次變化,并逐漸地穩定到另一個相應的穩定值上。
感應磁場的大小主要與潛艇所在磁緯度的地磁場的大小、潛艇的航向、潛艇本身搖擺的變化、潛艇所用鋼材的磁性能和潛艇的形狀等因素有關。目前的常規潛艇受內部空間及耗能的限制,大多數未裝消磁系統,因此感應磁性無法及時消除。潛艇的感應磁性與永久磁性共同作用,引起潛艇所在位置周圍地磁場的異常。
1.3 變化磁場
潛艇的感應磁場和固定磁場由于地磁場磁化而產生,稱為磁化靜磁場,潛艇的渦流磁場、雜散磁場、低頻磁場是電流引起的磁場,稱為變化磁場。
潛艇磁場就是由于鐵磁性潛艇受地磁場磁化而產生的附加磁場。它將引起周圍空間磁場分布的改變。航空磁探儀通過探測潛艇目標的磁異常信號來發現目標。因此,潛艇磁場是航空磁探儀搜索目標的信息源。由于磁場受海水、空氣、泥沙等介質的影響小,使得基于磁異常信號的航空磁探測具有可靠性強、隱蔽性好、定位精度高、搜索連續和反應迅速等特點,成為水下磁性目標探測的重要手段。為提高航空磁探儀的檢測能力,進一步對潛艇目標進行定位和識別,需要分析潛艇目標的高空磁場分布特征,為航空磁探儀提供目標信號參考。
2 基于邊界元法的潛艇高空磁場預測模型
由邊界元法原理,可得到P 點處潛艇的磁感應強度為
式中:n 為包絡觀測面S 上的單位外法向量;BQ為包絡觀測面S 上Q(x0,y0,z0)處的磁感應強度。
為得到實際條件下適用的潛艇磁場預測模型,對式(1)進行離散化,則
式中:Mi為第i 個平面剖分的邊界單元數,i=1,2,…,6;nij為第ij 個平面的單位法向量;BQij為單元ij 的測量磁感應強度數據,j=1,2,…,Mi;Sij為測量單元ij的面積。
潛艇磁場預測模型的包絡觀測面示意圖如圖1 所示。假設采用長方體包絡面包圍潛艇磁源進行三分量磁場測量,邊界面的劃分及測量點的布放規劃如圖1所示。測量得到面積單元ij 的磁感應強度數據BQij,并記錄各觀測點的坐標信息及該面積元的單位法向量,根據式(2)可以進行潛艇空間磁場預測。
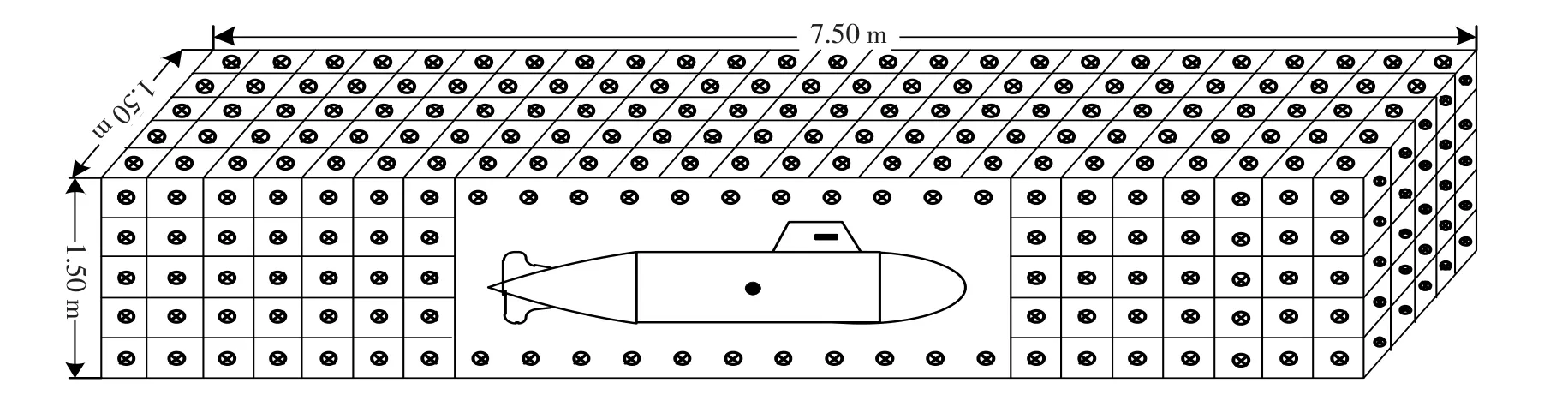
圖1 預測模型的觀測面
3 潛艇高空磁場信號仿真分析
本節主要根據潛艇高空磁場預測模型,即式(2),仿真分析潛艇高空磁異常信號的空間特征。
仿真數據:①潛艇目標,長半軸為2.8 m,短半軸為0.2 m 的鐵磁性旋轉橢球體;②長方體測量區域,長為7.50 m,寬與高均為1.50 m 的長方體表面;③邊界面劃分,將上下兩表面和左右兩側面各分成125 個長方形面積元,將前后兩側面各分成25 個長方形面積元,則整個邊界面共分成550 個長方形面積元;④地磁總場約為50 000 nT,磁傾角為52°,磁偏角為-3°。
3.1 潛艇一定航深、不同運動航向條件下的高空磁場分布
通過測量潛艇縮比模型在東、西、南和北4 個典型航向上的包絡面磁場數據,根據預測模型得到潛艇目標在4 個航向上的空間磁場分布,并投影到地磁場方向得到總場值,如圖2—圖5 所示。
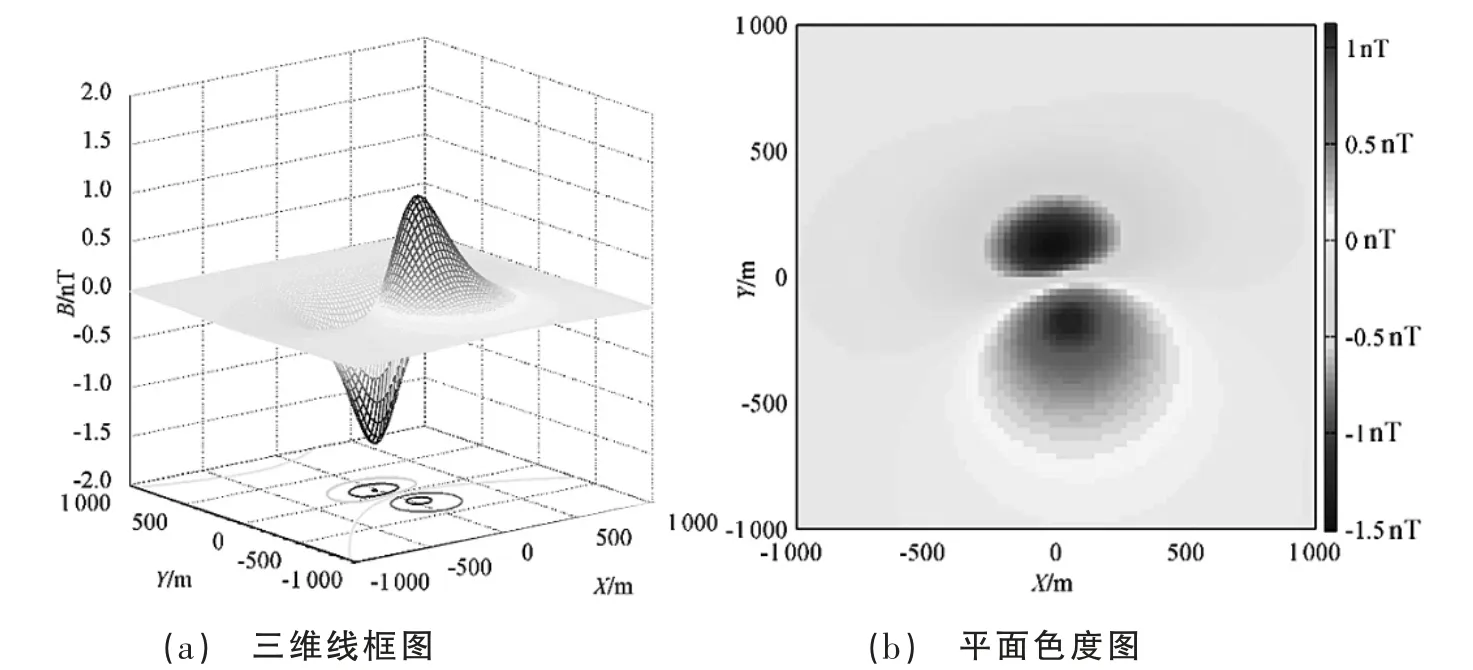
圖3 東航向
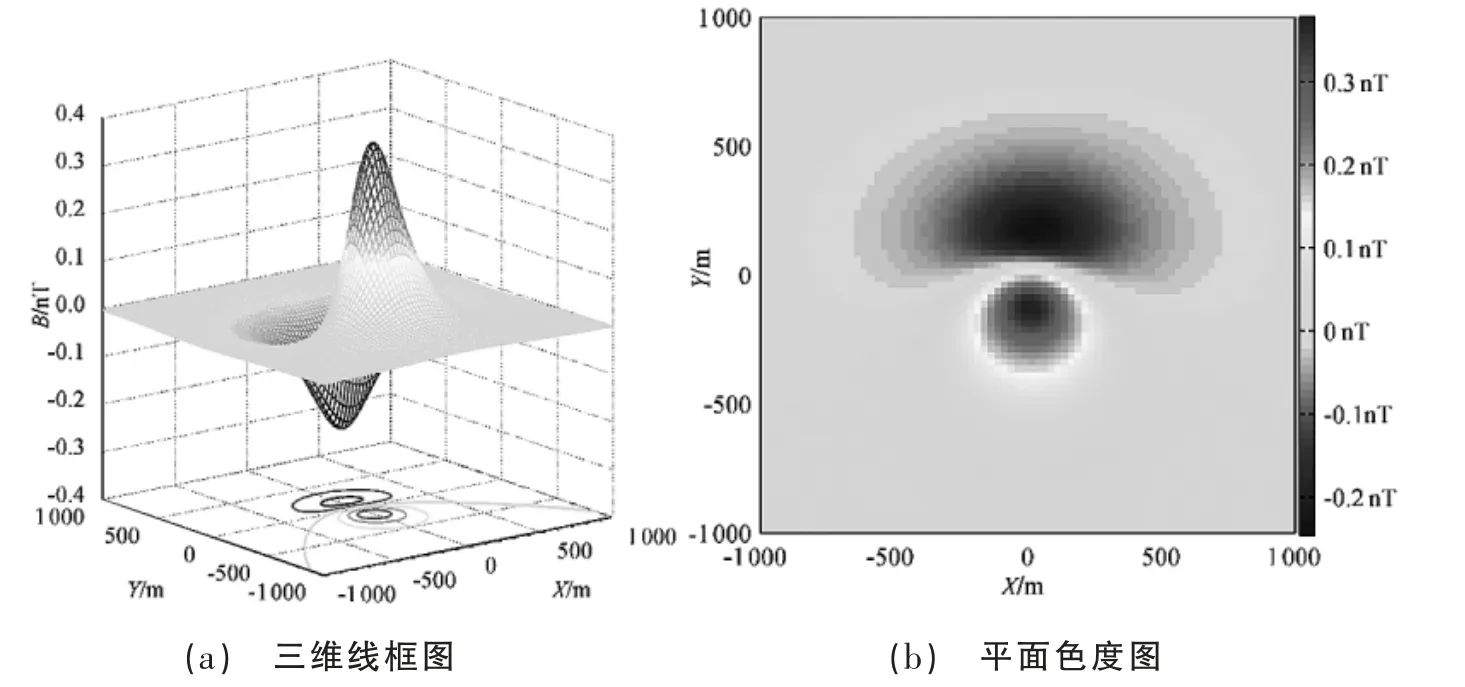
圖4 南航向
圖5 西航向
由圖2—圖5 對比潛艇的4 航向高空300 m 的總場分布可以發現,潛艇4 航向總場空間分布形狀基本相同,均具有1 個正峰和1 個負峰。4 航向之間的區別在于正峰與負峰之間的位置及幅值大小。就峰值而言,北航向空間磁場最大,東航向次之,南航向空間磁場的峰值最小。北航向、東航向、西航向的正峰幅值均小于負峰幅值,南航向反之。
3.2 潛艇一定航深、不同高度條件下的磁場分布
潛艇上方100、300、500 和700 m 的磁場分布如圖6 所示。
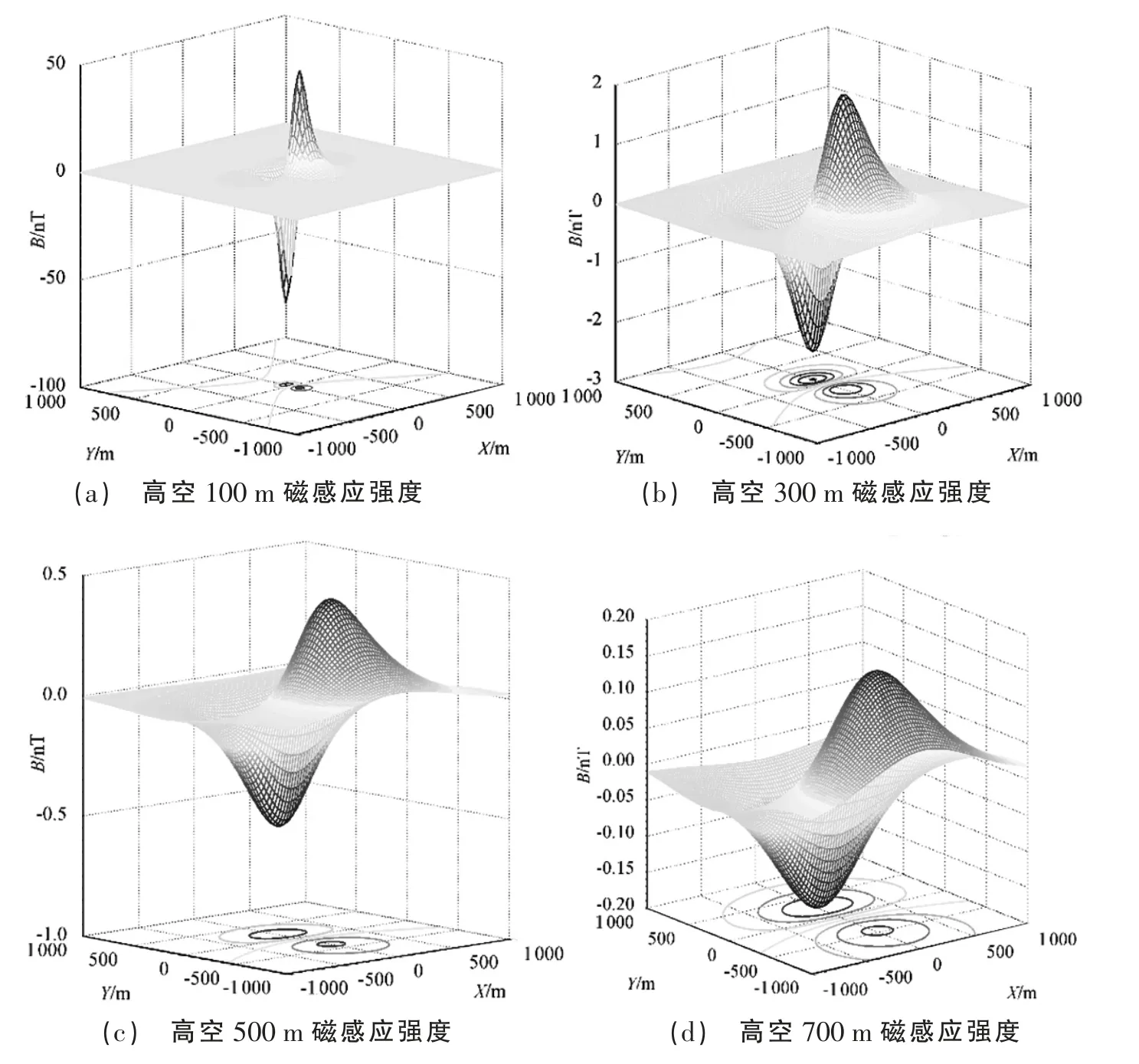
圖6 總場分布隨距離的變化
由圖6 可知,對比潛艇高空100、300、500 和700 m總場分布不難發現,隨著空間探測點與潛艇之間距離的不斷增大,信號衰減快。隨著高度不斷增加,潛艇磁場的空間波形基本保持一致。當磁探儀以同等速度及采樣頻率按相同的采樣軌跡從潛艇上方經過時,磁探儀采樣獲得的信號寬度不斷增大。
4 結論
由邊界元法建立的潛艇高空磁場預測模型可延拓得到潛艇磁場的空間分布,基于潛艇高空預測磁場模型,本文仿真分析了潛艇在不同運動航向、不同高度的空間磁場分布特征。由仿真結果可知,不同運動航向條件下,潛艇總場空間分布形狀基本相同,均具有1 個正峰和1 個負峰;隨著空間探測點與潛艇之間距離的增大,信號衰減,但潛艇磁場的空間波形基本保持一致。各航向之間高空磁場分布區域性明顯,具有一定的分布特征,能夠為航空磁探儀的目標探測和識別提供支持。通過仿真分析潛艇目標的高空磁場分布特征,為提高航空磁探儀的檢測能力,以及進一步對潛艇目標進行定位和識別提供理論支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
華人時刊(2020年13期)2020-09-25 08:21:42
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年1期)2016-01-11 16:53:24
