檢測焊縫爬壁機器人的設計
2023-08-11 13:49:08馬藝珍孟凡召
黑龍江科學 2023年12期
馬藝珍,孟凡召,徐 磊,高 碩
(山東華宇工學院,山東 德州 253000)
0 引言
LPG(Liquefied Petroleum Gas,LPG)球罐是常用的壓力容器之一,廣泛應用于工業領域,通常情況下LPG球罐用于儲存易燃、易爆、有劇毒類或帶有腐蝕性的高危介質。相比于圓筒式罐體,球形罐體具有質量輕、用材少、占地面積少等優點,結構方式為桔瓣式、足球式、混合式。目前,小于2000 m3的球罐普遍采用桔瓣式結構,大于2000 m3的普遍采用混合式結構[1]。
傳統的人工檢測成本較高,在球罐內檢測焊縫時需要工人不停地改變位置來檢測,長時間工作會非常疲勞,且待在球罐內對人體危害較大,故使用機器人代替人工檢測焊縫成為了重要的發展趨勢。本研究對爬壁機器人進行設計分析,開發了檢測焊縫的爬壁機器人,檢測效率高,吸附能力強,可精準定位。
1 爬壁機器人的設計
1.1 整體結構
爬壁機器人是一種能夠在壁面運動的自動化裝置,可代替人工完成危險的作業任務,滿足對球罐自動化檢測的要求。其主要包括底盤、激光雷達、磁輪、機械臂等結構,如圖1所示。
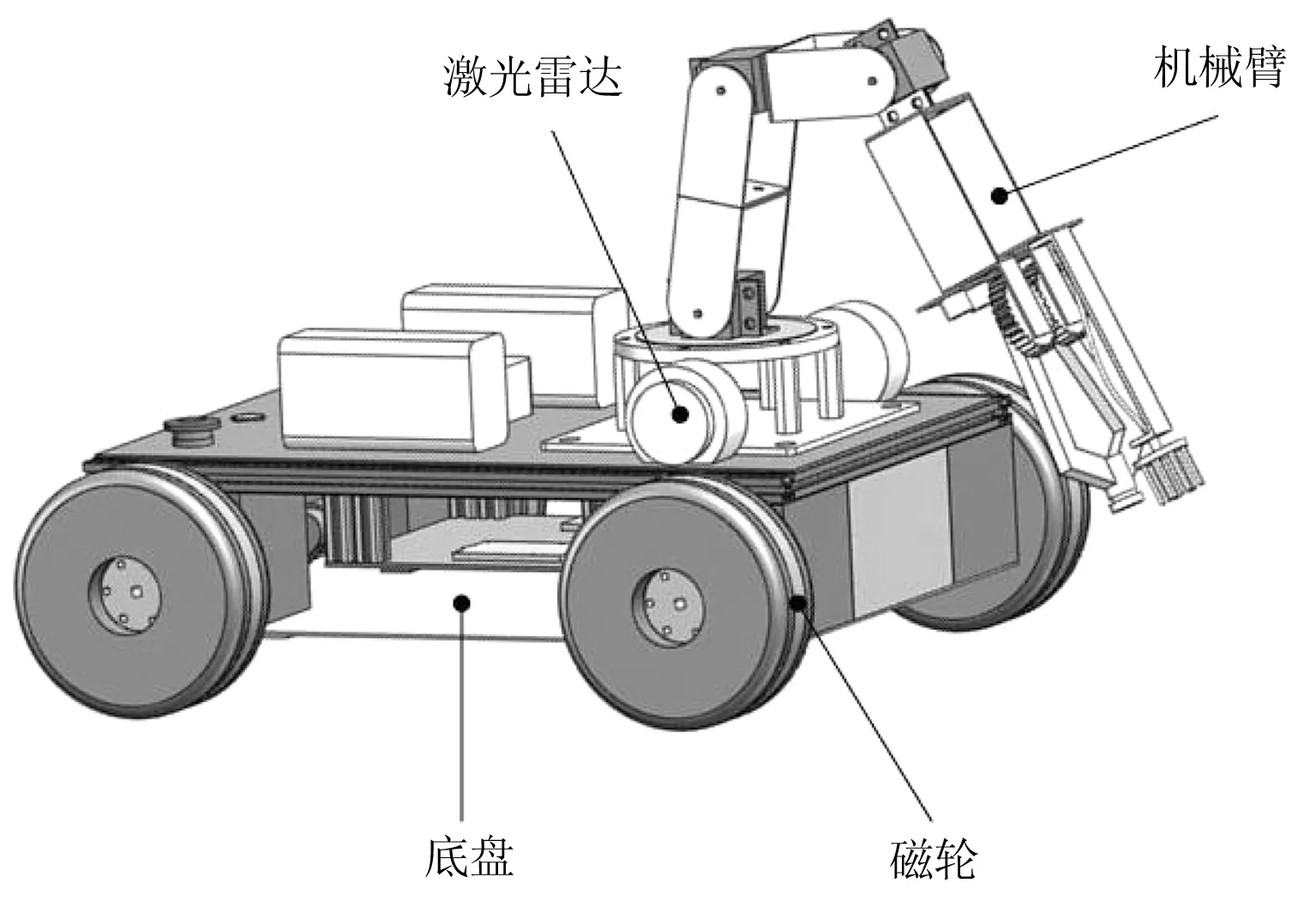
圖1 焊縫爬壁機器人簡圖
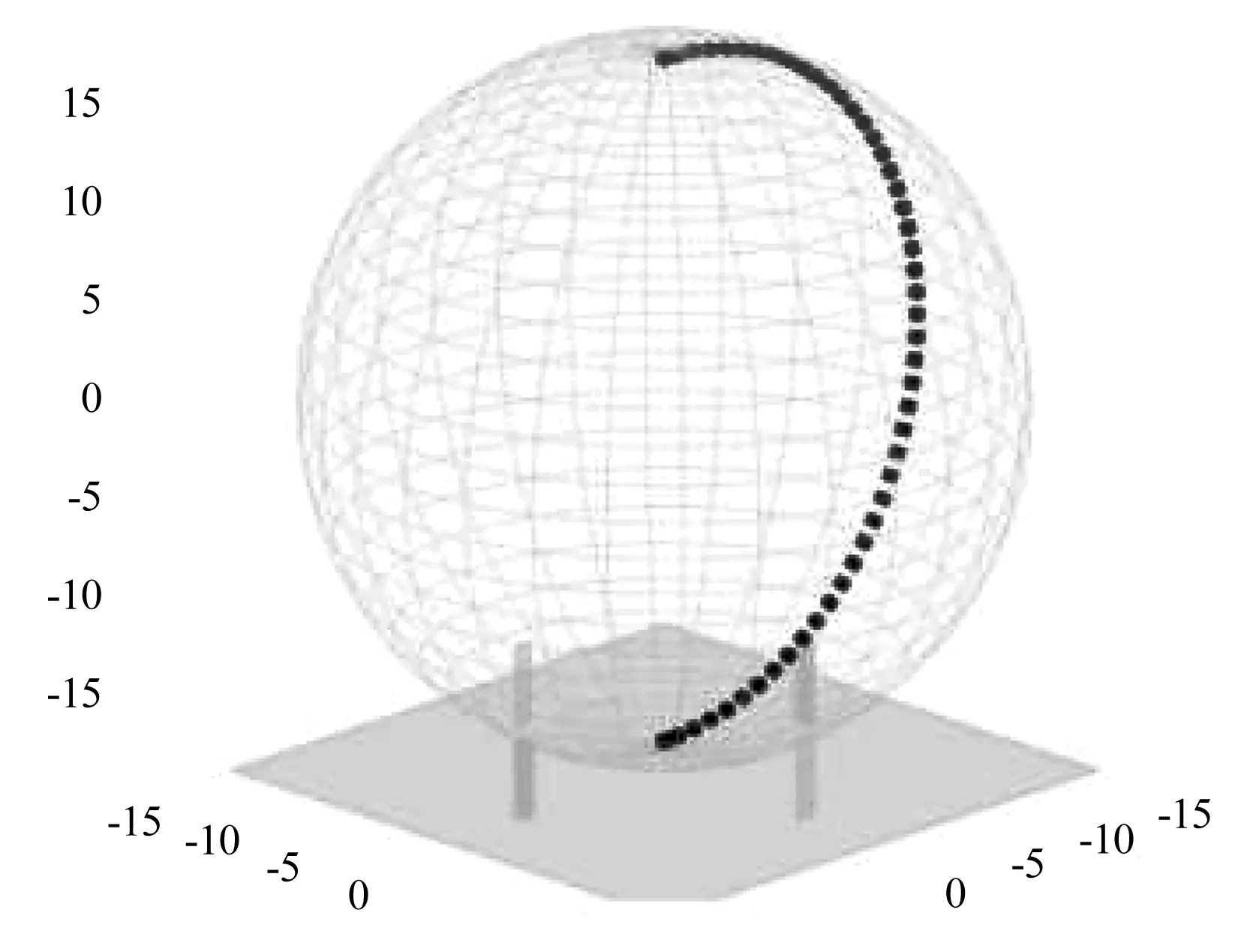
圖2 爬壁機器人球體內運動軌跡
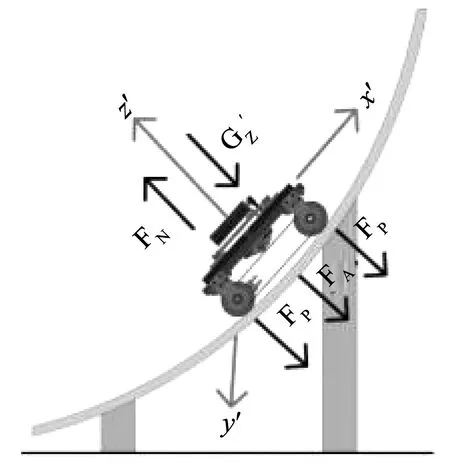
圖3 爬壁機器人力學分析
1.2 方案設計
設計的爬壁機器人的吸附方式為磁吸附,結構為輪式結構,令其更加穩定,能夠通過一定的障礙物。機器人的運動模型可用四輪滾動與滑動運動的組合運動極限來描述,故需在機器人坐標系中對車輪滾動約束及橫向滑動約束進行數學描述。滾動約束保證了所有車輪的轉動最終轉化為機器人的位移,數學方程為:
(1)
(2)
機器人的另一個約束是橫向滑動約束,保證了爬壁機器人不橫向移動,其數學模型為:
(3)
式中:
(4)
由各輪關節的滾動及滑動極限,可推導出爬壁機對器人的正微分方程為:
(5)
式中,J(θ)為一雅可比矩陣,形式為:
(6)
根據上述運動方程,利用仿真技術,可以描述爬壁移動機器人在模擬球形罐體環境中的運動軌跡,如圖 2所示,在實驗設置中選用兩種不同速度的電機,驗證該結構方案的可行性。
2 吸附方式的設計
2.1 吸附方式比較
1966年,日本的西亮教授研制出第一臺負壓吸附式爬壁機器人樣機[2],作為爬壁機器人的基本能力之一,吸附能力成為其研究熱點,目前已開發出不同的吸附方式,最常見的吸附方式為負壓吸附、磁吸附、推力吸附及混合吸附[3-6],特點對比如表1所示。

表1 爬壁機器人吸附方式比較
2.2 吸附方式的力學分析
爬壁機器人在運動過程中可能會附著在罐體內表面上下顛倒,這時重力法向分量為零或負,這會影響機器人的穩定性及運動效率。本項目設計的焊縫檢測爬壁機器人吸附并攀爬的墻壁為球罐內壁,采用磁吸附方式,可充分利用該內壁的鋼鐵材料屬性,經多次可行性論證,采用磁吸附形式最為合適[7]。因此可以在機器人上安裝強力磁鐵,使其保持朝向罐體表面及穩定的附著狀態,從而更加有效地完成工作任務。
但是,當爬壁機器人通過一個小障礙物(如焊縫)時,存在磁力瞬間丟失的可能性,即爬壁機器人在控制系統中超過其臨界穩定狀態。故需增加電磁鐵與主動附著控制策略,實現爬壁機器人的閉環控制。爬壁機器人力學分析如圖 3所示。
圖中,Fp為機器人輪子上永磁體產生的磁力,FA為電磁鐵產生的電磁力,該磁力通過電流控制來彌補Fp的丟失,電流大小通過預測的Fp丟失情況來決定。
綜合以上3種吸附方式及爬壁機器人力學分析,設計出一款永磁與電磁混合吸附的爬壁機器人,即在4個輪子上分別加上永磁鐵,在爬壁機器人的底盤加1個電磁鐵,令爬壁機器人可以穩定地吸附在球罐表面。
3 焊縫檢測設計
對于球罐焊縫的自動化檢測,選擇合適的檢測方式需要綜合考慮多個因素(如焊縫類型、厚度、尺寸、檢測精度要求、檢測效率、設備投資、工作環境等)。
射線檢測是一種較為傳統的檢測方法,在檢測物品的體積性缺陷方面尤為有效(如孔隙、氣孔及固體內含物),能夠很容易確認缺陷的性質及尺寸[8]。但其顯示及分析不方便,需要專業人員操作,且所使用的射線具有一定的輻射危害性,需要采取輻射防護措施。按照環保及安全要求,射線探傷大多數僅能安排在夜間作業[9]。
超聲波檢測[10]是一種非接觸式檢測方法,能夠在不停機、不破壞被檢測材料的情況下對焊縫進行檢測。TOFD(Time-of-Flight Diffraction)衍射時差法超聲檢測屬于超聲檢測的范疇,是一種高精度超聲波探傷技術,通過檢測超聲波在被測材料中的傳播時間及強度變化來判斷材料的缺陷情況。目前,已廣泛應用于工業材料缺陷檢測及評估。
3.1 TOFD檢測原理
TOFD衍射時差法超聲檢測利用缺陷尖端的衍射波信號,探測及測量缺陷尺寸。通常采用一發一收模式的雙探頭結構,通過缺陷端點的衍射波信號來探測并測定位置及尺寸[11]。根據聲波在工件中的傳播速度、時間,經過信號處理后形成一幅反映工件內部缺陷情況的圖像。當有缺陷存在時,在直通波與底面反射波之間,接收探頭會收到缺陷處產生的衍射波。TOFD檢測適用的工件厚度范圍為12 mm≤δ≤400 mm,一般球罐焊縫厚度可使用TOFD檢測,如圖4所示。
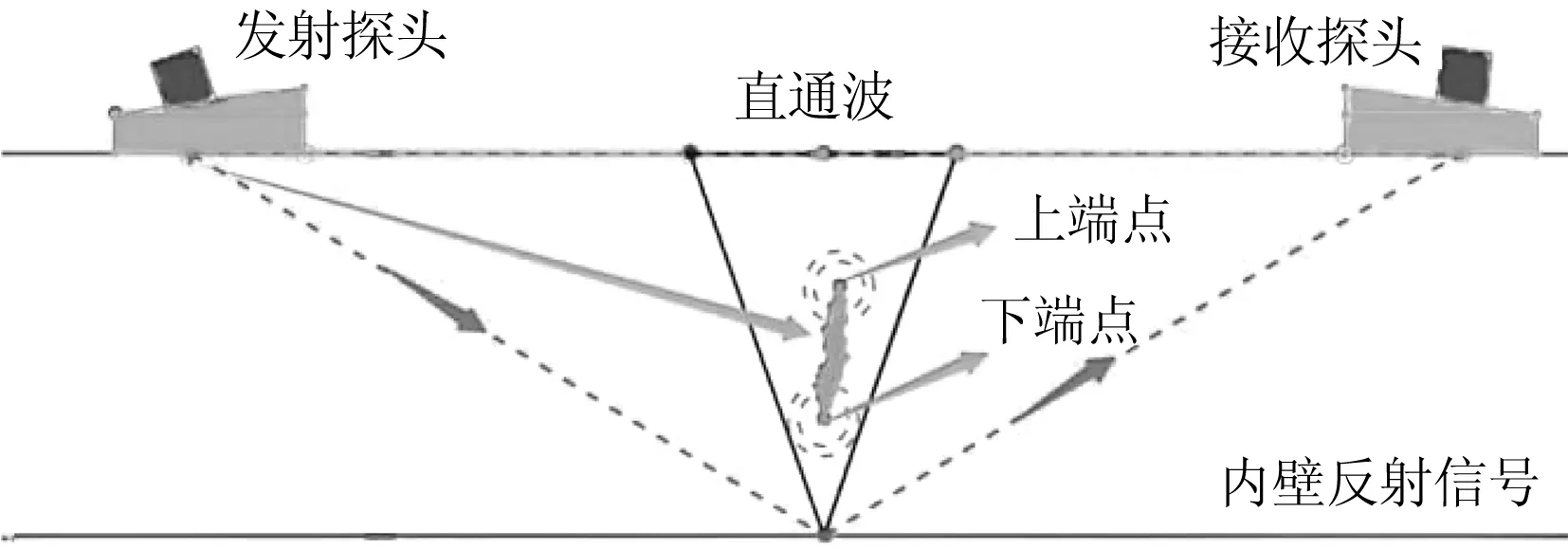
圖4 TOFD檢測原理
3.2 射線檢測原理
傳統的射線檢測技術使用膠片或像素探測器等來記錄射線透過被檢測物體后的強度,對比不同位置射線透過的強度差異,可檢測出物體內部的缺陷及物質分布信息。
隨著數字化技術的發展,數字射線檢測逐漸用于工業領域。不同于傳統的射線檢測技術,數字射線檢測是一種現代化無損檢測技術,利用射線在物質中的透過性質,通過數字化技術,將射線圖像轉換為數字信號,再由計算機進行處理分析,生成高分辨率的圖像并在顯示儀器上顯示,人們可根據這些圖像進行缺陷評定[12]。
將TOFD檢測與射線檢測進行對比發現,超聲波探傷技術更適用于液化石油氣球罐內部焊縫檢測。因為球罐內部空間較為狹小,檢測需考慮安全及環保因素,而超聲波探傷技術具有以下優勢:非破壞性檢測。不會破壞被檢測物體,不影響球罐及其使用壽命。高精度。可提供高精度的檢測結果,檢測到非常小的缺陷,測量缺陷的深度及大小。實時性強。可以實時監測球罐內部焊縫的情況,及時發現問題,有效避免安全事故的發生。定量評估。可以對焊縫進行定量評估,得到非常準確的數據。安全性高。超聲波探傷技術不需使用放射性物質,不會對人身安全及環境造成影響,適用于人員密集區域進行檢測。
綜上所述,對于液化石油氣球罐內部焊縫的檢測,超聲波探傷技術更為適用。
根據衍射時差法的超聲檢測理論,研制了一種基于超聲波的焊縫檢測裝置,利用缺陷斷電的衍射信號來檢測并確定缺陷位置。通過超聲波發射器,將超聲波傳播到被測焊縫上,當超聲波傳播過程中遇到缺陷時,超聲波將被反射、衍射或散射。這些信號將被接收器接收并傳輸到信號處理單元進行處理。通過分析信號特征,確定焊縫中的缺陷位置及尺寸,做出判斷及診斷。
機器人的本體上裝有機械臂、探傷儀、水泵、激光雷達、水瓶。機械手臂是一個具有4個自由度的手臂,機械臂前端能夠夾住探頭,兩側機械夾開合角度可控,可根據選用的探頭大小進行調節,根據具體場景選用不同規格的探傷儀,不拘泥于單一產品。測距傳感器安裝在機械手的頂部,可測量機械手前端與被測設備間的距離,使探頭與被測設備貼合得恰到好處。水泵主要由泵體、吸水管及出水管組成,吸水管連接到耦合劑瓶內,出水管連接在機械臂上,將噴頭安置在機械臂前端,旋轉毛刷內置噴頭,毛刷旋轉的同時噴涂適量的耦合劑,在設備探傷時將耦合劑噴灑在被測設備表面。檢測焊縫的爬壁機器人能夠操縱探頭進行探傷。該裝置是整個系統的關鍵部分,通過結構創新與爬壁機器人的緊密連接,實現球罐焊縫的精確檢測。
4 定位導航技術設計
機器人路徑規劃是一種實現機器人自主導航,以確定最佳步行路徑的技術,根據機器人的任務要求,規劃步行路徑的特定約束標準。常見的約束標準包括最短時間、最短距離、完全遍歷等。研究人員針對不同的路徑規劃問題提出了許多解決算法,出現了許多與機器學習、模式識別等相結合的智能規劃算法。液化石油氣球形儲罐的內部環境通常是黑暗的,因此無法確定路標。在這種復雜的環境下,利用傳統的地圖創建與同步定位(SLAM)技術及自適應蒙特卡羅定位(AMCL),很難實現機器人定位及路徑規劃導航。目前,焊縫檢測機器人的定位通常通過機器人攜帶的多種傳感器來實現,以提高定位精度及可靠性。常用的傳感器包括視覺傳感器、激光傳感器、紅外距離傳感器等[13]。然而,在具有很少甚至沒有地標及缺乏良好照明條件的液化石油氣球形儲罐環境中,可應用的傳感器類型受到限制,爬壁機器人定位問題變得更具挑戰性,故而,更加準確地反饋出故障位置顯得尤為重要[14]。
針對上述問題,提出基于雙激光雷達輔助標定的黑暗環境下爬壁機器人定位方法。在該模式下,編碼器里程表以雙激光雷達掃描的焊接信號為路標,根據編碼器記錄的里程表及IMU記錄的機器人旋轉角度進行校準。在多傳感器記錄機器人位置信息的基礎上推導了擴展卡爾曼濾波方程,實現了多個信息的穩定融合,提高了爬壁機器人的定位精度。在本項目中,激光雷達沒有水平安裝,因為水平掃描并不能清晰地掃描罐內的一些環境特征,相反,在垂直掃描中可以利用罐內的焊縫作為環境特征來檢測物體的相對運動。
5 結論
檢測焊縫的爬壁機器人廣泛應用于工業領域,從吸附方式、焊縫檢測、定位技術等方面進行研究,通過對比多種吸附方式,采用永磁與電磁混合吸附方式,保證爬壁機器人可以穩定地吸附在球罐內表面。通過對比TOFD衍射時差法超聲檢測與射線檢測原理,決定采用TOFD檢測,具有檢測效率更高、檢測靈敏度更高、成本更低等優點。在多傳感器記錄機器人位置信息的基礎上提出基于雙激光雷達輔助標定的黑暗環境下爬壁機器人定位方法,提高了爬壁機器人的定位精度。檢測焊縫的爬壁機器人可以有效代替檢測人員進入球罐內并快速完成焊縫檢測,提高了檢測效率及自動化水平,減少了人為因素對檢測結果的影響,保證了檢測結果的準確性。這種機器人可應用于各種工業領域(如石油化工、航空航天、汽車制造等),具有廣闊的發展前景,可為焊縫檢測提供高效、精確、安全的解決方案。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
建材發展導向(2021年6期)2021-06-09 05:57:08
裝備制造技術(2021年1期)2021-05-21 07:55:04
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
制造技術與機床(2018年12期)2018-12-23 02:40:58
制造業自動化(2017年2期)2017-03-20 14:26:13