基于滑模變結構的高速同步電機直接轉矩控制
2023-08-21 09:39:37崔紅高有清
無線互聯科技 2023年12期
崔紅 高有清


摘要:針對高速同步電機,文章研究了基于滑模變結構的無傳感器直接轉矩控制。該控制方式將滑模變結構和直接轉矩控制相結合,用以改善電機定子磁鏈和電磁轉矩的脈動。本文對基于滑模變結構的無傳感器高速同步電機直接轉矩控制和傳統直接轉矩控制系統性能中的定子電流、電磁轉矩和定子磁鏈軌跡分別進行了仿真對比分析。仿真結果表明,采用基于滑模變結構的無傳感器直接轉矩控制方式可以減小定子電流和電磁轉矩的脈動,定子磁鏈頻帶寬度變化較小,適合對高速同步電機控制。
關鍵詞:滑模變結構;高速同步電機;無速度傳感器;直接轉矩控制
中圖分類號:TM355? 文獻標志碼:A
0 引言
高速電機具有功率密度高、體積小、響應快、工作噪聲小、節能等優點,在汽車加工、機械加工等領域應用廣泛。
直接轉矩控制是一種在矢量控制之后發展起來的高性能變頻調速技術,通過控制定子磁鏈來控制電磁轉矩。直接轉矩控制不需經過繁雜的坐標變換以及改變轉子位置等電機參數,只需檢測定子電阻即可估算出定子磁鏈和電磁轉矩。直接轉矩控制具有結構簡單、魯棒性好、轉矩響應快、動態性能好等優點,但也存在電流、定子磁鏈、電磁轉矩脈動大以及干擾大時系統響應慢等缺點。
直接轉矩控制中定子磁鏈和電磁轉矩脈動大的主要原因是逆變器的開關頻率不高。目前,大多采用多電平功率轉換器、恒定逆變器開關頻率及智能控制等方法減小磁鏈和轉矩脈動。這在不同程度上增加了系統的成本和復雜性、實時控制難以實現等問題。本文將滑模變結構和直接轉矩控制相結合,用以改善定子磁鏈和電磁轉矩的脈動。
1 基于滑模變結構的直接轉矩控制方式
1.1 高速同步電機的數學模型
高速同步電機的空間矢量如圖1所示。
α、β直角坐標系為定子靜態坐標系,其中α軸與定子繞組A軸重合。d、q直角坐標系為轉子旋轉坐標系。d軸與轉子磁鏈方向重合,以同步速度ω逆時針方向旋轉。兩個直角坐標系間的夾角為θ。
假定同步電機磁路為線性,忽略飽和,不計渦流損耗和磁滯損耗。電機三相定子繞組對稱,沒有齒槽效應,氣隙磁勢呈正弦波分布。
高速同步電機的數學模型如下:
diddt=udLd-RLdid+LqLdiqdωdt(1)
diqdt=uqLq-RLqiq+LdLqiddωdt-ψfωLq(2)
T=1.5pm[ψfiq+(Ld-Lq)idiq](3)
dωdt=1J(Te-Tm)(4)
dθdt=ω(5)
式中ud和uq分別為d軸和q軸的定子電壓,Ld和Lq分別為d和q軸的自感,ψf表示永磁極與定子? 繞組間的磁鏈,Te和Tm分別表示電磁轉矩、機械轉矩。pm為轉矩繞組磁極對數,J為轉子轉動慣量,θ為轉子位置角,ω為轉子機械角速度,R為定子電阻。
1.2 直接轉矩控制
直接轉矩控制采用空間電壓矢量分析的方法,利用滯環控制器分別對電磁轉矩和磁鏈幅值進行控制,對逆變器的開關狀態開展最佳的控制,以對電機的轉速進行控制。
直接轉矩控制實質為:定子磁鏈幅值恒定,通過控制定、轉子磁鏈間的夾角來控制電磁轉矩。快速改變轉矩角能夠使轉矩響應加快。
1.3 滑模變結構直接轉矩控制
滑模變結構控制具有結構簡單、動態響應快、對內部參數變化和外部干擾自適應性好的特點,應用廣泛。滑模變結構控制以往復穿越滑模面的形式運動,控制量存在開關切換、需要消除系統抖振的問題。
近些年來,Levant等學者提出了高階滑模控制的思想[1]。高階滑模控制的主要特點是:(1)抗干擾能力強,魯棒性好。(2)能抑制滑模抖振的問題,提高動態性能。同步電機調速系統通常采用二階滑模控制。可將二階滑模控制算法引入直接轉矩控制系統中,代替永磁同步電機直接轉矩控制系統的滯環控制器,與空間矢量脈沖調制技術相結合,以改善永磁同步電機直接轉矩控制系統的缺陷。
滑模變結構控制是用于不確定、非線性系統的一種有效集成方法。閉環系統結構在滑動面上具有不連續性,即隨時間來改變系統結構的切換特性。滑模變結構控制系統基于切換函數運行,該切換函數由控制變量決定,以確保系統模式變量能夠達到設計的空間切換平面[2]。由于滑動面固定,且滑模的運動特性為預先設計好的,因此滑動面和參數決定了系統的穩定性和動態行為。
而直接轉矩控制對象定子磁鏈和轉矩的反饋值與給定值之間的偏差可作為切換函數。
定子磁鏈控制器的滑模面函數為:
sφ=φ*s-φs(6)
定子磁鏈控制器設計為[3]:
u*d=Kp|sφ|rsgn(sφ)+usd
dusddt=Kisgn(sφ)(7)
電磁轉矩控制器滑模面函數為:
sT=T*e-Te(8)
電磁轉矩控制器設計為:
u*q=Kp|sT|rsgn(sT)+usq
dusqdt=Kisgn(sT)(9)
式(7)和式(9)中:Ki、Kp為正數,需要符合控制器的穩定性要求,sgn(x)為符號函數。r(0 0.5]且為實數,滑動變量分別為s=sφ和s=sT。當r=0.5時,可獲得有限時間收斂的滑模控制器;當r=1時,可獲得指數穩定的控制器。
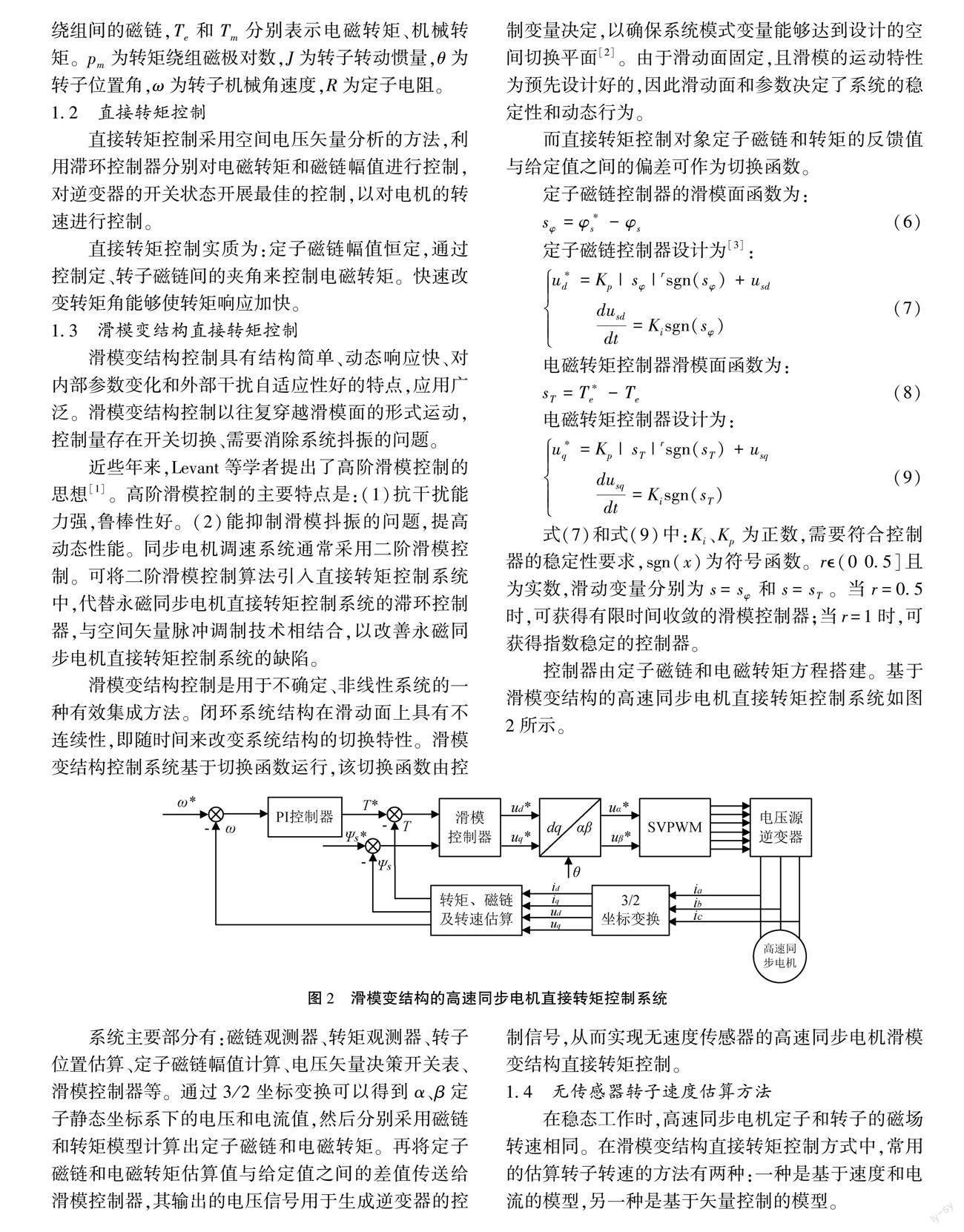
控制器由定子磁鏈和電磁轉矩方程搭建。基于滑模變結構的高速同步電機直接轉矩控制系統如圖2所示。
系統主要部分有:磁鏈觀測器、轉矩觀測器、轉子位置估算、定子磁鏈幅值計算、電壓矢量決策開關表、滑模控制器等。通過3/2坐標變換可以得到α、β定子靜態坐標系下的電壓和電流值,然后分別采用磁鏈和轉矩模型計算出定子磁鏈和電磁轉矩。再將定子磁鏈和電磁轉矩估算值與給定值之間的差值傳送給滑模控制器,其輸出的電壓信號用于生成逆變器的控制信號,從而實現無速度傳感器的高速同步電機滑模變結構直接轉矩控制。
1.4 無傳感器轉子速度估算方法
在穩態工作時,高速同步電機定子和轉子的磁場轉速相同。在滑模變結構直接轉矩控制方式中,常用的估算轉子轉速的方法有兩種:一種是基于速度和電流的模型,另一種是基于矢量控制的模型。
本研究中采用了基于速度和電流模型的估算方法。在定子α、β靜止坐標系中,可以通過電機的輸出端電壓和電流計算出定子磁鏈的幅值以及相角。定子磁鏈的幅值和相角計算方法為:
ψα=∫(uα-Rsiα)dt(9)
ψβ=∫(uβ-Rsiβ)dt(10)
θs=arctan(ψβψα)(11)
電機穩定運行時,轉子速度估算值為:
ωr=ωs=dθsdt=ddt(arctanψβψα)=(uβ-iβRs)ψα-(uα-iαRs)ψβψα2+ψβ2(12)
式中Rs代表定子電阻,ωr代表轉子的轉速,ωs代表定子磁場角速度。采用上述轉子速度估算方法,速度估算動態響應快,時延較小。
2 系統仿真結果及分析
為了驗證滑模變結構應用于無速度傳感器高速同步電機直接轉矩控制系統的效果,按照上述方法對系統性能進行了仿真研究。高速同步電機參數如下:額定電壓為380 V;額定功率為75 kW;額定轉速為36 000轉/分;磁極對數為1;定子電阻為0.04 Ω,定子電感為210mH。仿真結果如圖3—圖8所示。
從圖3—圖8可以看出,基于滑模變結構的無傳感器高速同步電機直接轉矩控制和傳統直接轉矩控制方式相比,定子電流和電磁轉矩波形的脈動較小,定子磁鏈軌跡為圓形,而且頻帶寬度變化較小。
3 結語
本研究提出的基于滑模變結構的高速同步電機直接轉矩控制系統可以實現無傳感器控制。轉子速度可以采用基于速度和電流模型的方法估算。通過? 對額定轉速為36 000轉/分的高速同步電機進行系統性能的仿真研究,結果表明,采用基于滑模變結構的無傳感器直接轉矩控制方式與采用傳統直接轉矩控制方式相比,定子電流和電磁轉矩脈動較小,定子磁鏈頻帶寬度變化也較小,更適合于對高速同步電機的控制。
參考文獻
[1]DENG H,CAO G Z,HUANG S D,et al. A sensorless vector strategy for the PMSM using improved sliding mode observer and fuzzy PI speed controller[EB/OL]. (2015-12-01)[2023-05-10].https://xueshu.baidu.com/usercenter/paper/show?paperid=5c90f99cb72d254e5e4f8c7ed22c7959&site=xueshu_se&hitarticle=1.
[2]呂剛震,郝潤科,黃家豪.基于滑模變結構的永磁同步電機直接轉矩控制[J].電子測量技術,2018(21):42-46.
[3]秦大偉.永磁同步電機滑模變結構的直接轉矩控制研究[J].電子世界,2018(3):72.
(編輯 王永超)
Direct torque control of high speed synchronous motor based on variable structure sliding mode
Cui? Hong1, Gao? Youqing2
(1.Liaoning Provincial College of Communications, Shenyang 110122, China;
2.Shenyang Everbright Environment Technology Co., Ltd., Shenyang 110026, China)
Abstract: Sensorless direct torque control(DTC)based on variable structure sliding mode is studied for high speed synchronous motor. This control method combines variable structure sliding mode with DTC to improve the ripple of stator flux and electromagnetic torque. The stator current, electromagnetic torque and stator flux trajectory between sensorless high speed synchronous motor DTC based on variable structure sliding mode with traditional DTC are simulated and analyzed respectively. The simulation results show that the stator current and electromagnetic torque ripple can be reduced using sensorless DTC based on variable structure sliding mode, and the stator flux band width changes little, which is suitable for the control of high speed synchronous motor.
Key words: variable structure sliding mode; high speed synchronous motor; no speed sensor; DTC
