基于STM32的高齡老人智能看護終端設計
2023-08-21 11:19:41扈書亮韓淼王會成
現代信息科技 2023年12期
扈書亮 韓淼 王會成


摘? 要:結合單片機技術和移動通信技術設計基于跌倒檢測的老人看護系統,通過陀螺儀實時采集老人身體姿態,經單片機分析并判斷是否發生跌倒。若符合跌倒條件,實現蜂鳴器報警現場求救,以及發送老人定位信息短信進行救援呼叫的雙重功能,并設定跌倒后求助短信發送延遲時間,可用手動按鍵方式關閉報警解除誤判。旨在降低跌倒給老年人帶來的二次傷害,減少經濟損失,提高老年人的晚年生活品質。
關鍵詞:STM32 MCU;陀螺儀姿態采集;智能看護
中圖分類號:TP27? 文獻標識碼:A? 文章編號:2096-4706(2023)12-0170-04
Design of Intelligent Care Terminal for the Elderly Based on STM32
HU Shuliang1, HAN Miao2, WANG Huicheng3
(1.Tianjin Vocational College of Mechanics and Electricity, Tianjin? 300350, China; 2.Tianjin Tianshi College, Tianjin? 301700, China;3.Tianjin Huohua Technology Co., Ltd., Tianjin? 300350, China)
Abstract: The elderly care system based on fall detection is designed by combining the Single-Chip Microcomputer technology and mobile communication technology. The body posture of the elderly is collected in real time through the gyroscope, analyze and determine whether a fall has occurred through a Single-Chip Microcomputer. If the conditions for falling are met, the dual functions of buzzer alarm for on-site rescue and sending elderly positioning information SMS for rescue call can be achieved. The delay time for sending help SMS after falling can be set, and the alarm can be manually turned off to resolve misjudgment. The aim is to reduce secondary injuries caused by falls to the elderly, reduce economic losses, and improve the quality of life of the elderly in their later years.
Keywords: STM32 MCU; gyro posture acquisition; intelligent care
0? 引? 言
當前社會老齡化現象日趨嚴重,人口老齡化比例逐步上升,老人的身體健康和人身安全等問題成為亟待解決的問題,對老年人群體威脅最大的是因跌倒引發的意外傷害,跌倒既可能直接造成身體受傷或致殘,也可能使老年人因畏懼跌倒而不敢進行正常活動,這都給老年人的生活造成了不良影響,可以說,跌倒已經成為威脅老年人健康和安全的最大隱患。
據衛生部門調查顯示,65歲以上的高齡人口中,約22%男性與43%女性均有過跌倒經歷。老年人因跌倒引發的意外傷害占意外傷害比例的78%,65歲及以上的老人發生跌倒的比例占20%~28%,其中,造成傷害的比例達高達70%,10%左右為嚴重傷害程度。跌倒后未及時救治會對老人造成一定程度的創傷,嚴重的甚至威脅到生命安全,給老人及其親人帶來沉重的負擔,老年人的身體健康和日常生活也將會面臨嚴峻的挑戰。因此,當今社會應對老年人的日常行動安全給予更多的關注。
綜上,老人看護系統的研究勢在必行,為此,利用單片機技術和GSM通信技術,提出了基于跌倒檢測的老人看護系統設計,以便于跌倒后的及時發現與救治,降低因跌倒給老年人帶來的意外傷害,同時進一步減輕跌倒對于老年人的二次傷害。老人看護系統為老年人提供了既安全又可靠的生活環境,能夠檢測日常活動中出現的異常狀態和不可預見的突發情況,并能及時聯系相關看護人員,讓子女可以隨時隨地查看老人當前的狀態,既加強親情的交流,又一定程度上輔助解決社會養老問題。
1? 高齡老人智能看護終端的硬件設計
1.1? 總體設計方案
方案主要完成基于跌倒檢測的老人看護系統的設計,從系統設計實用性、操作便利性、低成本性等各方面考慮,設計功能盡可能多的滿足當前市場需求,并具有一定前瞻性,從而保證系統的使用壽命,以便于進一步提高系統的穩定性。綜合以上系統設計考慮因素,基于SMT32的老人看護系統主要由STM32模塊、陀螺儀模塊、GPS定位模塊、GSM通信模塊、報警模塊、按鍵模塊及電源模塊構成,系統工作流程分析如下:
1)通過陀螺儀模塊實時采集老人身體姿態,系統檢測身體傾斜加速度,判定老人跌倒,蜂鳴器報警。
2)系統判定跌倒狀態,LED燈閃爍,蜂鳴器同時鳴叫提示路人求救的同時,通過GPS定位模塊確定老人跌倒時的具體經緯度信息,利用GSM通信模塊以短信方式將GPS定位信息發送給軟件設定的緊急聯系人。
3)系統可設定跌倒后求助短信發送的延遲時間,為防止誤判產生,可手動通過按鍵關閉報警,解除誤判。系統總體設計框圖如圖1所示。
1.2? 主控芯片選擇
系統設計開發過程中,目前常用控制芯片主要包括DSP、FPGA(CPLD)、PLC(可編程序控制器)、單片機控制器等,每種芯片特性及適用場合不同:
1)DSP芯片:DSP芯片擁有8位到128位極其復雜的操作系統,以及目前8核并行系統。DSP芯片處理速度快,存儲空間大,可靠性高,成為高科技領域的主流芯片,但是成本較高、控制系統復雜。
2)FPGA(CPLD)芯片:FPGA是一種用VHDL語言開發和編譯的現場可編程門陣列。其最突出的特點是運行速度快、電路簡易,但一般需要與DSP或者單片機相匹配,以有效的縮短時間,提高精確度。
3)單片機控制器芯片:單片機芯片可采用C語言等編程語言完成程序的編寫,通過在線仿真掌握系統內部結構,可以有效的節省硬件成本。
綜合系統實現功能及開發成本兩方面考慮,本次設計選用單片機控制器作為系統主控模塊,本設計通過以下兩個方案進行主控模塊的論證選擇。
方案一:使用ATMEL公司的51單片機作為主控制器。51單片機為功耗低、性能高的8位單片機,但其內部存儲空間容量較小、且IO接口數量有限,故放棄此方案。
方案二:使用STM32主控芯片作為系統主控核心單元。芯片內部自帶AD轉換功能,使系統電路設計更加簡單,處理速度進一步提升,因此,該控制芯片得到了極其廣泛的應用。此外,研究人員使用該芯片還可以減少開發周期,而且系統本身融合性能較好,研發成本較低。與51系列和CPLD系列控制器相比,STM32具有高性價比、抗外界干擾能力強等特點。
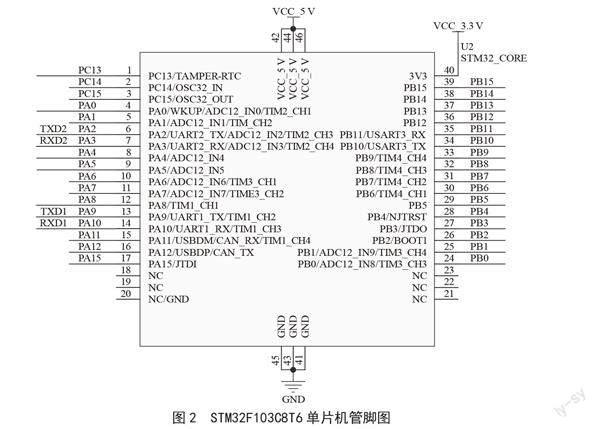
從控制芯片的穩定性及抗干擾性能兩方面考慮,本設計選用STM32F103C8T6系列作為系統核心控制芯片,如圖2所示。由中斷處理器、定時計數器、數據處理器、數據寄存器4部分共同組成。此款控制芯片可以提供豐富的接口,在后續的外圍電路的搭建和擴展上擁有更多的便利。
1.3? 身體姿態數據采集模塊
對老人是否存在跌倒的情況進行判斷,主要依靠其身體姿態數據的獲取和分析完成,而ADXL345加速度傳感器恰好可實現老人身體姿態數據的檢測,因此,設計選用ADXL345加速度傳感器完成老人身體姿態的實時檢測。
ADXL345傳感器為功耗相對較低的一款3軸加速度測量儀,分辨率高達13位,并且具有高精度、輸出穩定等特點。其可將測量獲取的加速度數值轉換為相應電信號,經后續信號調理電路,模數轉換電路輸出補碼形式的16位二進制數據,送單片機處理分析輸出相應變量數值。ADXL345傳感器在運動或者需靜態傾斜角度檢測的設備中應用較多,可檢測±1.0°范圍內的角度變化值。
該模塊工作電壓在4.5~6 V之間,系統電源電壓是5 V,沒有額外電源轉換電路,ADXL345傳感器工作原理為:兩邊極板固定好后,兩極板之間的介質在傳感器作用下,由于重力作用,介質會向無速度變化的那一邊靠近,會使介質到兩邊極板的距離發生改變,因此使得之間的電容值發生改變。X、Y和Z三軸的加速度值可以由以下公式得到:
上式分別代表X、Y和Z三軸對應加速度值,0g表示偏置或者移位速度指標,Z+1g表示系統偏置參數,不同型號傳感器Z+1g不同。模塊5 V供電,單片機PA4和PA5分別與SCL和SDA相連,本設計系統電路如圖3所示。
1.4? GPS定位模塊的硬件設計
當系統檢測到老人跌倒后,可通過GSM模塊將老人實時位置數據以短信形式發送緊急聯系人,設計中老人跌倒位置即經緯度信息的獲取通過ATGM332D模塊實現。
ATGM332D具有高靈敏度特性,且支持單雙系統聯合定位功能。內部跟蹤通道個數多達32個,可以同時接收所有GPS和BDS可見衛星信號,除此之外還具有低功耗、內置天線短路保護功能等關鍵特性。
本設計中單片機發送數據引腳TXD2(PA2口)與GPS接收數據的引腳RXD相連。
1.5? GSM通信電路的設計
系統設計要求若判斷老人處于跌倒狀態,則采用GSM無線通信方式以短信方式通知緊急聯系人,本設計中GSM模塊采用的是SIM800C模塊。
SIM800C采用城堡孔封裝,通信頻率為2.4 GHz,為一款四頻GSM/GPRS模塊。具有低功耗、體積小、性能穩定等特點。設計采用GMC模式,亦稱短信模式,該種模式相對于流量模式而言控制相對簡單,操作也極其簡便,符合本文老人看護系統設計的要求。數據傳輸模式如圖4所示。
2? 高齡老人智能看護終端的軟件設計
基于STM32的老人看護系統的軟件設計采用模塊化的編程方法,包含GSM模塊驅動軟件設計、按鍵檢測驅動設計、ADXL345檢測信號程序設計、GPS模塊檢測設計。系統首先對單片機和各模塊進行初始化,開始進行跌倒檢測,若判定跌倒,則聲光報警立即啟動,并開始15 s計時,若15 s內解除誤判按鍵無按下,則系統判定老人跌倒,獲取老人跌倒位置經緯度數據,將位置數據以GSM短信方式發送至指定緊急聯系人手機,主程序具體流程圖如圖5所示。
老人姿態數據采集在軟件方面采用中斷方式完成加速度信號的數據采集。首先該模塊初始化操作,通過定時器計時達50 ms即可產生定時中斷信號,此時進入中斷處理程序,單片機采集加速度數值,進行姿態分析,若采集數據變化量、變化速度超過臨界值,則返回主程序進一步進行處理。如圖6所示。
ATGM332DGPS模塊支持BDS(北斗)/GPS/GLONASS衛星導航系統的單系統定位以及任意組合的多系統聯合定位。通過UART作為主要輸出通道與主控MCU完成通信,波特率默認為9 600 bit/s、8個數據位、無校驗、1個停止位。按照NMEA0183協議格式輸出。通過串口調試助手可以觀察到模塊輸出的報文包含了GPS定位信息($GPGGA)、地理定位信息($GPGGL)、當前衛星信息($GPGSA)、可見衛星信息($GPGSV)、最簡定位信息($GPRMC)等。根據本設計要求主要獲取日期、時間、經緯度等信息,因此,將報文中$GPRMC后的數據進行解析,格式如下:
$GPRMC,
主控MCU控制SIM800C模塊發送報警信息主要過程包括:
1)單片機通過UART發送AT指令,模塊返回ok,表示模塊通信同步成功。
2)發送AT+CPIN?查詢SIM800C是否讀到卡,模塊返回+CPIN:READY代表讀到卡。
3)發送AT+CMGF=1設置為文本模式,返回OK表示成功。
4)發送AT+CSCS=“GSM”設置字符集編碼。
5)發送AT+CMGS=“139XXXXXX72”,其中內容為發送對象的手機號碼,返回<。
6)將老人報警信息、位置信息等轉換為短信息內容發送,最大180字節。
7)發送16進制0x1A完成短信發送工作。如圖7所示。
3? 高齡老人智能看護終端的系統調試
連接GPS天線,系統上電,系統進行初始化,將實物豎直狀態放置(模擬系統口袋放置狀態),將實物快速推倒模擬老人跌倒,隨即LED燈閃爍,蜂鳴器鳴叫,若15 s內接觸誤判按鍵老人沒有按下,則系統判定老人跌倒,獲取老人跌倒位置經緯度數據,將位置數據以GSM短信方式發送至指定緊急聯系人手機,手機短信內容如圖8所示。若系統存在誤判,則可通過誤判解除按鍵解除聲光報警,系統返回繼續檢測老人姿態狀態。
采用實物進行現場模擬演示,實物面板豎直放入口袋,蜂鳴器隨即報警,LED燈閃爍,提醒周圍人群幫忙,如果15 s內未解除誤判,GSM模塊會向指定手機發送求救短信,信息內容包括經緯度信息,提供準確位置。本系統設置了獨立的解除誤判按鈕,如果老人因為彎腰等操作造成誤鳴,可在15 s內解除誤判。經反復測試,系統工作正常。
4? 結? 論
本設計通過陀螺儀模塊實時檢測老人身體姿態,經單片機進一步分析判斷老人是否為跌倒狀態,若判定老人跌倒,則通過本地LED閃爍及蜂鳴器報警方式向路人尋求救援,同時借助GSM模塊以短信方式將GPS模塊獲取的跌倒位置經緯度信息發送至指定緊急聯系人手機,以便及時救援;若存在誤報,則可在系統設定求助短信發送的時間范圍內通過按鍵模塊實現誤報的解除。但仍然存在以下不足之處:如GPS在定位時位置數據存在一定偏差,ADXL345加速度傳感器在工作時易產生誤判等,還有待進一步改進,此外,可增加心率、血氧等檢測方案,將本系統的功能性進一步加強。
參考文獻:
[1] 王嘉強.基于跌倒檢測的老人看護系統的設計與實現 [D].青島:青島大學,2019.
[2]聶影,邵世云龍.基于ADXL345傾角傳感器的老人防跌倒檢測與報警系統 [J].科技風,2020(34):22-23.
[3] 陳旭,向琦,陳芳.基于加速度傳感器的摔倒檢測報警系統設計 [J].科技與創新,2019(6):56-57.
[4] 李欣欣,徐靜,文歡.基于單片機的跌倒檢測報警系統設計 [J].無線互聯科技,2019,16(14):48-49.
[5] 王嵐.基于多傳感器的跌倒檢測與預警技術研究 [D].合肥:合肥工業大學,2020.
[6] 于浩,李姿.老人跌倒報警系統的設計 [J].湖北農機化,2019(10):66.
[7] 陳曉娥,李宗瑛,羅康.單片機控制的老人防跌倒系統硬件設計探討 [J].信息與電腦:理論版,2019(2):76-77.
[8] 周坤.基于可穿戴設備的獨居老人跌倒檢測系統研究 [D].蘭州:蘭州交通大學,2019.
作者簡介:扈書亮(1983—),男,漢族,河北保定人,講師,碩士研究生,研究方向:電工電子技術職業技術教育。
