可變姿態(tài)撲翼腿水陸兩棲機器人設(shè)計
2023-08-21 08:43:56高健喬查江濤孫羽翀
科技創(chuàng)新與應(yīng)用 2023年23期
高健喬,查江濤,李 桐,孫羽翀
(哈爾濱工程大學(xué),哈爾濱 150001)
傳統(tǒng)的水下潛器推進方式如依靠螺旋槳和噴水推進實現(xiàn)推進,在低速情況下機動性較差,并會在推進時產(chǎn)生較大的噪聲,對周圍環(huán)境干擾較大[1]。水下推進器在低速下的機動性、噪聲與對周圍環(huán)境影響的控制是制約當(dāng)前水下航行器效能發(fā)揮的主要因素。
水陸兩棲機器人多為推進器腿式和推進器履帶式,水下推進機構(gòu)與陸地行走機構(gòu)分離,結(jié)構(gòu)復(fù)雜,推進效率低下。
目前尚未有成熟的采用非常規(guī)推進方式作為水下推進的水陸運動機構(gòu)一體化的兩棲機器人出現(xiàn),一種結(jié)構(gòu)簡單可靠、行進效率高、擾動小的兩棲機器人開發(fā)需求迫切。
1 主體結(jié)構(gòu)設(shè)計
機器由3D 打印結(jié)構(gòu)件、亞克力防水艙、電路硬件、腿部結(jié)構(gòu)和浮球組成。機器人尺寸為750 mm×600 mm×95 mm。
如圖1 所示,3D 打印結(jié)構(gòu)件包括承載防水艙的主體及頭部、尾部、機身左右的外殼。

圖1 水陸兩棲機器人內(nèi)部結(jié)構(gòu)圖
電路硬件包括在防水艙內(nèi)的24V6S 的鋰電池、分電板、STM32F4 主控板、6 個閉環(huán)一體式步進電機、3 個水氣兩用泵及在浮球上的信號接收機組成。
浮球漂浮在水面上,與水下機身靠電纜連接,如圖2 所示,浮球上載有無線信號接收機用來接收控制信號(也可采用水聲通信來取締電纜和浮球)。
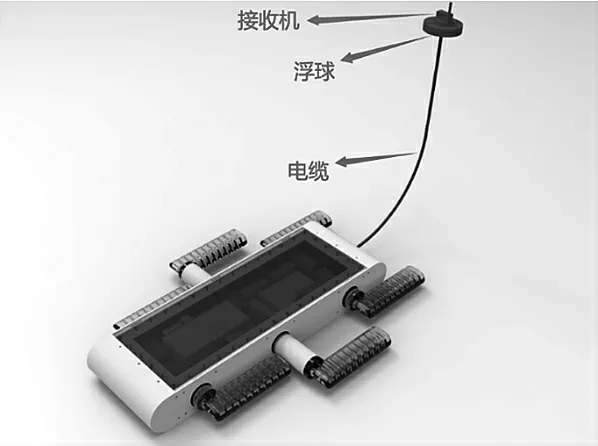
圖2 水陸兩棲機器人通信電纜結(jié)構(gòu)圖
機身側(cè)面在水面漂浮的水線上方有通氣孔,用于吸排空氣/水,氣孔通過氣管與水氣兩用泵連接,并做好防水,防止水在艙內(nèi)泄露。
氣動柔性腿可根據(jù)內(nèi)部空腔壓力的改變來改變姿態(tài),內(nèi)部不加壓時為撲翼狀態(tài),可作為水下運動機構(gòu)[2],當(dāng)加壓后氣動柔性腿發(fā)生卷曲,可作為陸地上的運動機構(gòu)。
2 柔性腿設(shè)計
通過對不同形狀的柔性腿進行仿真對比,最終確定了設(shè)計方案,柔性腿形狀為扁平的蹼狀。柔性腿尺寸圖如圖3 所示。
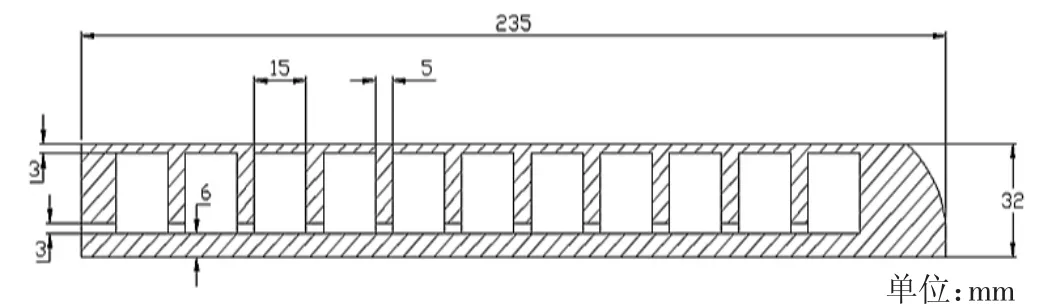
圖3 柔性腿尺寸圖
柔性腿模型如圖4 所示,運用ABAQUS 軟件進行氣驅(qū)動及水驅(qū)動變形仿真,添加材料屬性、約束關(guān)系、驅(qū)動條件后仿真結(jié)果如圖5—圖8 所示。
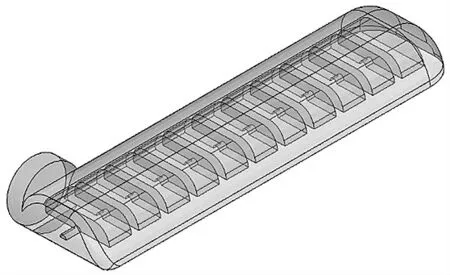
圖4 柔性腿模型圖

圖5 不加壓初始狀態(tài)
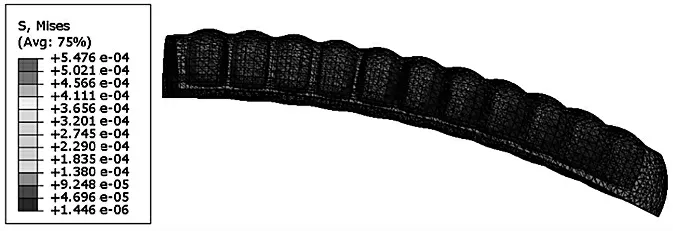
圖6 壓力為40 kPa

圖7 壓力為100 kPa

圖8 內(nèi)部充水模擬情況
當(dāng)柔性腿內(nèi)部空腔充氣加壓時,隨著氣壓增大柔性腿會向硅膠厚度大的一面彎曲[3],但當(dāng)空腔內(nèi)部氣壓超過一定限度時,此時增大氣壓,柔性腿將逐漸膨脹并趨近于初始的彎曲形態(tài),不再繼續(xù)卷曲,如圖9 所示,所以當(dāng)機器使用時需測試環(huán)境條件下的合適氣壓。
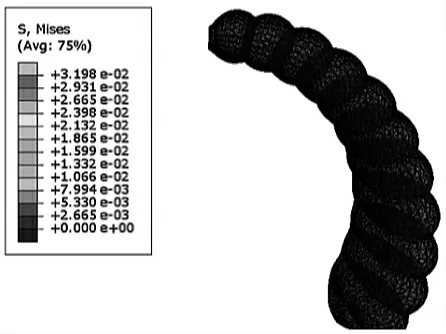
圖9 壓力為200 kPa
3 工作模式
如圖10 所示,機器人擁有水下和陸地2 種工作模式。
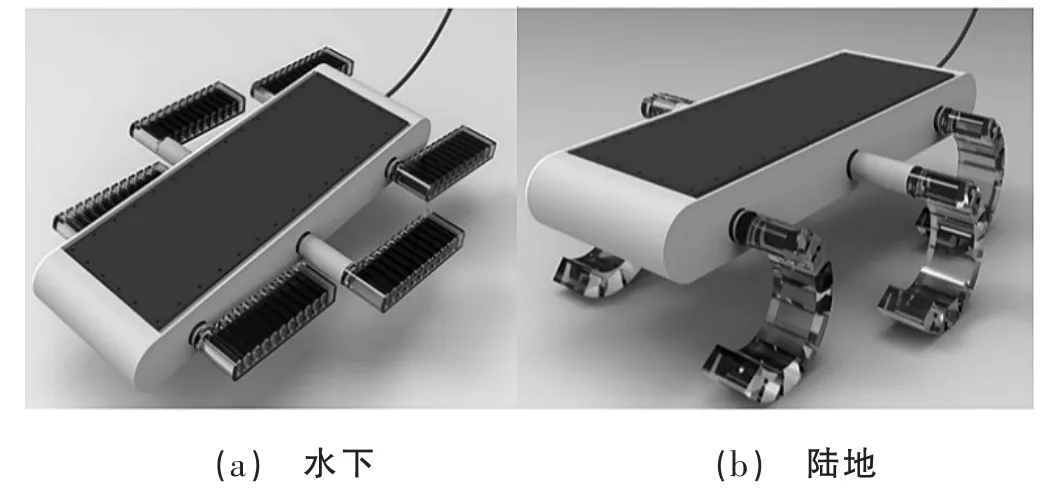
圖10 水陸模式切換示意圖
3.1 水下運動動作
當(dāng)柔性腿未加壓充氣時,在水中柔性腿內(nèi)空腔灌滿水,柔性腿為蹼狀板型,依靠6 個電機的定軸轉(zhuǎn)動來連帶柔性腿擺動,可實現(xiàn)前進、后退、轉(zhuǎn)向、翻滾、垂直的上浮和下潛的機動動作。
如圖11 所示,動作由6 個電機(①~⑥)轉(zhuǎn)動連帶柔性腿往復(fù)擺動來實現(xiàn)。

圖11 電機及充氣泵位置圖
3.1.1 運動參數(shù)
對于不同的動作,使用矩陣A 來表示不同動作每個電機所轉(zhuǎn)動的開始角度θ0i和結(jié)束角度:
3.1.2 協(xié)調(diào)參數(shù)
使用一個兩行一列的矩陣B 用來描述在水下不同動作時6 個電機的協(xié)調(diào)情況,第一行βi是6 個電機的不同占空比情況,分別代表第i 個腿的電機;第二行的參數(shù)γi是每個腿在第一個周期內(nèi)開始運動的時間。
1)前進動作。運動參數(shù)為
即每條腿的初始角度都為-30°,終止角度為30°。
協(xié)調(diào)參數(shù)為
即每條腿的占空比都為0.5,每條腿的電機同時觸發(fā)。
2)后退動作。運動參數(shù)為
即每條腿的初始角度都為30°,終止角度為-30°。
協(xié)調(diào)參數(shù)為
即每條腿的占空比都為0.5,每條腿的電機同時觸發(fā)。
3)轉(zhuǎn)向動作。右轉(zhuǎn)運動參數(shù)為
即①、③、⑤號電機30°為起始位置,-30°為終止位置;②、④、⑥號電機-30°為起始位置,30°為終止位置,
右轉(zhuǎn)協(xié)調(diào)參數(shù)為
為了中部的轉(zhuǎn)向平穩(wěn),經(jīng)實驗測試選擇①、②、⑤、⑥號電機的占空比為0.6,③、④2 個電機的占空比為0.4,①、②、⑤、⑥電機同步開始運動。③、④2 個電機延遲0.5 個單位時間運動。左轉(zhuǎn)運動與之類似。
4)上浮下潛動作。上浮運動參數(shù)為
即每條腿的初始角度都為60°,終止角度為120°。
上浮協(xié)調(diào)參數(shù)為
為了中部的上升平穩(wěn),經(jīng)實驗測試選擇①、②、⑤、⑥號電機的占空比為0.6,③、④2 個電機的占空比為0.4,①、②、⑤、⑥電機同步開始運動。③、④2 個電機延遲1 個單位時間運動。下潛運動與之類似。
5)翻滾動作。運動參數(shù)為
即①、③、⑤號電機60°為起始位置,120°為終止位置,②、④、⑥號電機-60°為起始位置,-120°為終止位置。
協(xié)調(diào)參數(shù)為
即①、②、⑤、⑥號電機的占空比為0.6,③、④2 個電機的占空比為0.4。
3.2 陸地運動
一個周期內(nèi)的步態(tài)可大體分為2 個部分,①、④、⑤腿為一組,②、③、⑥腿為一組,當(dāng)①、④、⑤進行第一部分的同時,②、③、⑥進行周期內(nèi)第二部分,2 組腿呈三角步態(tài)交替前進(圖12)。
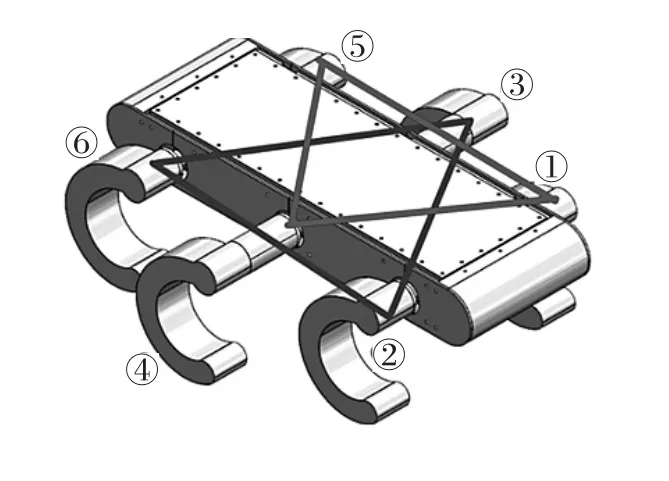
圖12 腿分組示意圖
P、Q為在陸地上行駛時2 組腿部的三角步態(tài)矩陣以及步態(tài)隨時間演變的模擬[4]。ε 表示腿部站立,τΔ 表示腿部擺動。
4 軟件設(shè)計
4.1 軟件控制框架
軟件控制框架如圖13 所示,選擇的步進電機為自帶驅(qū)動和電機控制模塊的步進電機,將6 個步進電機掛載在同一條CAN 總線上通過CAN 通信發(fā)送相應(yīng)的指令控制6 個步進電機完成相應(yīng)的動作需求。同時,為了實現(xiàn)遠程無線控制,選擇了無線控制套件(包含一個2.4 GHz 接收器和一個無線遙控器),通過DBUS 的方式與2.4 GHz 接受器通信。
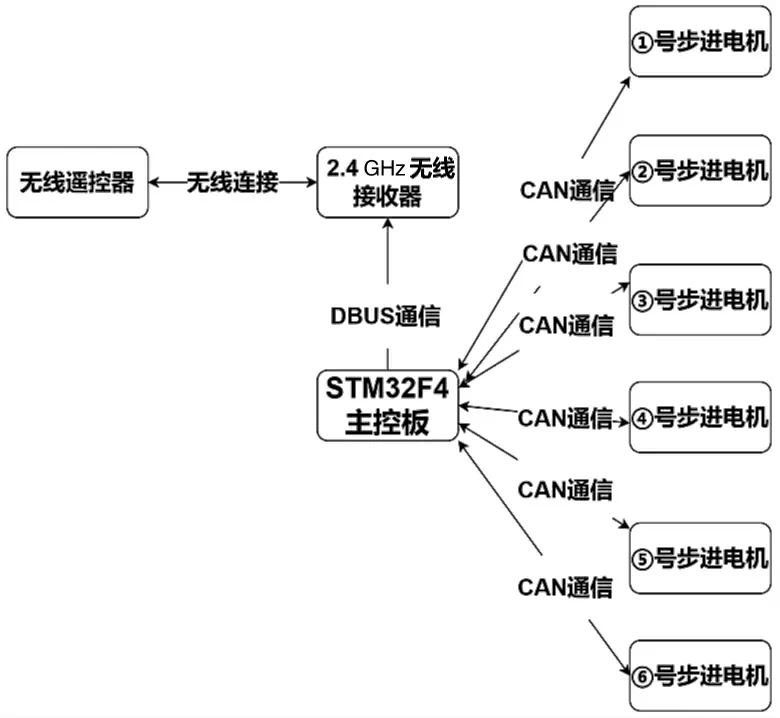
圖13 軟件控制框架圖
4.2 DBUS 通信協(xié)議
DBUS 協(xié)議是類UART 的一類私有協(xié)議,具有UART 的共同特征,波特率為100 kbps,單元數(shù)據(jù)長度為8,奇偶校驗位為偶校驗,結(jié)束位為1,無流控。
需要注意的是DBUS 信號控制電平符合TTL,卻和普通UART 信號是相反的,所以,需要在MCU 端需要增加三極管取反電路,MCU 才能正常識別出UART信號。
DBUS 協(xié)議:當(dāng)遙控器與接收機建立連接后,接收機每隔14 ms 通過DBUS 發(fā)送一幀18 字節(jié)數(shù)據(jù),包含了撥桿以及遙桿的信息。用于控制機器人移動方向以及移動速度大小。
4.3 步進電機控制器通信協(xié)議
步進電機的通信協(xié)議遵循CAN2.0B 協(xié)議,驅(qū)動器通信的擴展幀中定義了29 位擴展標(biāo)識符(SID)+8 字節(jié)數(shù)據(jù),標(biāo)識符部分的定義如圖14 所示。
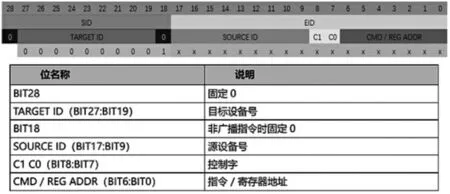
圖14 標(biāo)識符定義圖
上位機可向驅(qū)動器發(fā)出操作指令以控制驅(qū)動器完成各項工作。控制指令的通信幀中,需要進行如下設(shè)置。
目標(biāo)設(shè)備ID:設(shè)置控制對象驅(qū)動器的設(shè)備ID。
源設(shè)備lD:上位機發(fā)送指令時設(shè)置為“0”(只限擴展幀使用)。控制字:C1=1、C0=1。
指令碼:驅(qū)動器CAN2.0 私有協(xié)議中,規(guī)定了各個指令碼對應(yīng)控制驅(qū)動器工作的各項指令。通過發(fā)送不同的指令碼,控制電機的位置以及速度。
指令參數(shù):指令分為無參數(shù)指令及有參數(shù)指令2 種,使用有參數(shù)指令時,在通信幀數(shù)據(jù)部分中設(shè)置參數(shù)值。
5 實驗測試
尺寸:0.75 m×0.60 m×0.095 m。
機身尺寸:0.75 m×0.35 m×0.095 m。
機器人重量:15.30 kg。
凈排水重量:16 kg。
儲備浮力重量:2.3 kg。
水中運動速度:0.28 m/s。
陸地運動速度(三足步態(tài)):0.16 m/s。
機器人電池容量:8 000 mAH。
機器人在水中的撲翼運動效果與撲翼的大小、形狀及材質(zhì)有關(guān)。一般來說,撲翼的面積越大、材質(zhì)越硬,撲翼擺動產(chǎn)生的力越大,但會造成機器人的運動顛簸。根據(jù)樣機實測,蹼板狀形狀配合半剛性半柔性材料的撲翼運動效果最好。
氣動柔性腿方案設(shè)計在標(biāo)準(zhǔn)大氣壓下加壓至100 kPa 左右達到陸地上卷曲腿部的形狀要求,且機器人在陸地上運動時,單個腿部可承受5 kg 的重量,腿部材料無大變形損壞。
通過webots 機器人運動學(xué)仿真結(jié)果可知,陸地上的腿部運動步態(tài)方案可行,可實現(xiàn)前進及轉(zhuǎn)向,設(shè)計方案在陸地上的運動效果良好,可實現(xiàn)在崎嶇越野地形、階梯狀地形、灘涂地形的運動。webots 運動模擬圖如圖15 所示。
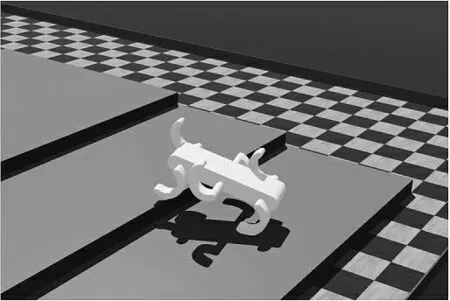
圖15 webots 運動模擬圖
6 結(jié)束語
文中提出的可變姿態(tài)撲翼腿水陸兩棲機器人,運用同一結(jié)構(gòu)的2 種狀態(tài)來實現(xiàn)水下和陸地運動,姿態(tài)模式切換簡單自如,機械結(jié)構(gòu)簡單可靠。水中采用撲翼推進方式對周圍環(huán)境干擾小、效率高,可實現(xiàn)水下六自由度運動。陸地上采用腿式步態(tài)對各種崎嶇地形的適應(yīng)能力強。
利用abaqus 軟件對可變姿態(tài)柔性撲翼腿進行了加壓驅(qū)動仿真,根據(jù)仿真結(jié)果進行了可變姿態(tài)撲翼腿的迭代設(shè)計,并根據(jù)設(shè)計模型制作出水下運動樣機進行實驗測試,樣機在水下可完成前進、后退、轉(zhuǎn)向、上浮、下潛和翻滾的六自由度運動。并在webots 中對機器人陸地上的運動步態(tài)進行模擬,模擬結(jié)果顯示機器人在陸地上機動性良好。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
電信科學(xué)(2016年10期)2016-11-23 05:11:56
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37