基于Jetson TX2視覺識別的取放一體平衡機器人
2023-08-22 19:39:59王錦璟武志濤馬雨楊
電子產品世界
2023年8期
王錦璟 武志濤 馬雨楊


關鍵詞:視覺識別;平衡機器人;機器人;PID控制;OpenCV;STM32
機器人技術是當前發展最快的領域之一,已經廣泛應用于物流、制造、醫療衛生和社會服務等多個領域。針對在復雜環境下人工操作難以實現自動化、智能化和精確性的問題,本項目開發了一款基于Jetson TX2 的取放一體平衡機器人。該機器人采用高性能的Jetson TX2作為硬件平臺,可實現高速圖像處理和計算。機器人采用現代機器人技術的機械結構和電氣控制,包括兩輪平衡機器人和機械臂等。軟件系統包括圖像處理、運動控制和用戶界面等模塊,通過自主感知、控制和運動規劃等功能,該機器人能夠精準地捕獲并放置物品。本項目在Jetson TX2 平臺上搭建了機器視覺開發環境,并利用OpenCV等技術實現了本地端圖形方式的信息傳遞功能。針對機器人運動過程中的控制,采用了PID 控制算法。
1 系統設計
1.1 系統框架
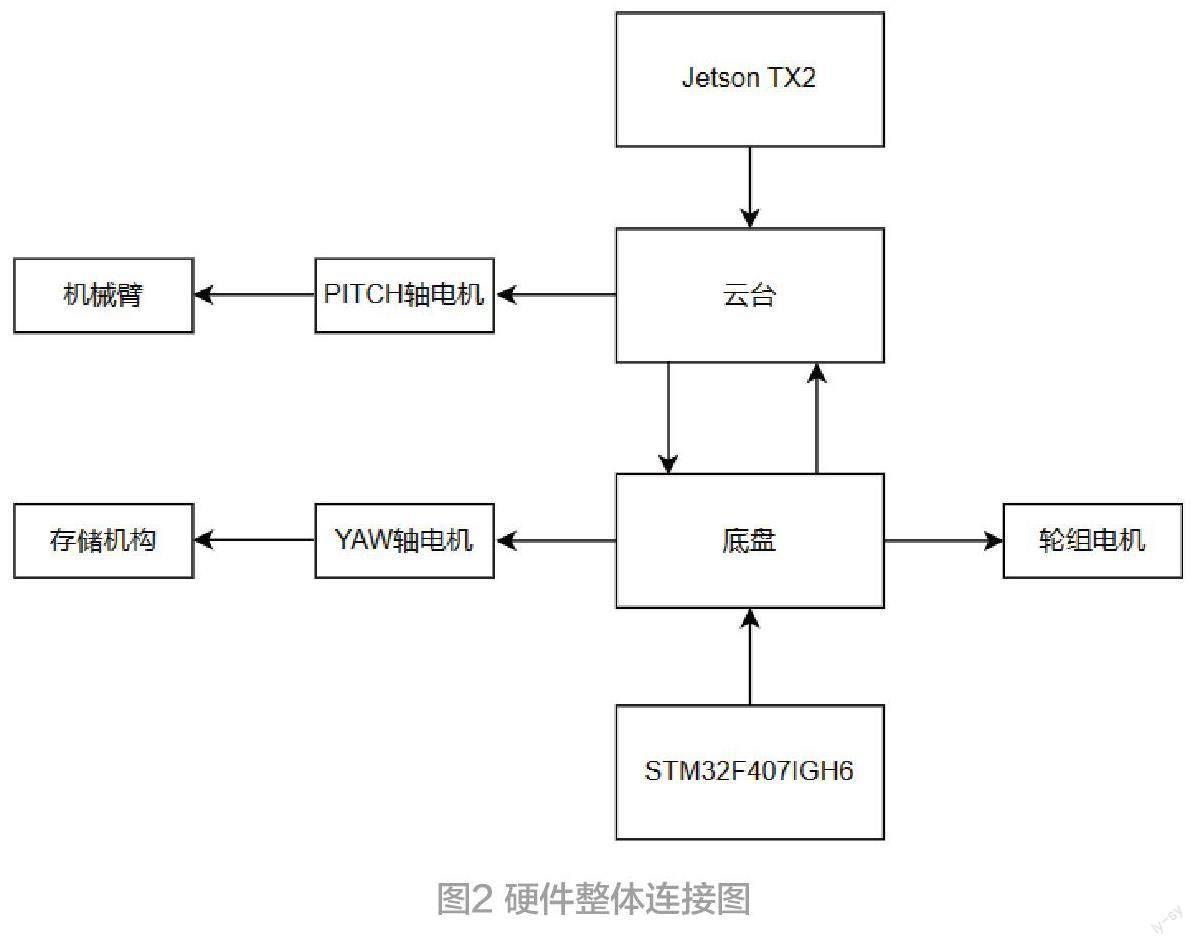
本機器人的運動控制系統采用STM32F407IGH6 作為主控,該主控采用高性能的ARM Cortex-M4 處理器,能夠有效地處理高速數據和復雜算法。該主控存儲容量可擴展,可儲存大量程序代碼和數據,確保系統具有快速響應和高效性能。此外,該主控還擁有多種外設和通信接口,支持機器人系統的多樣化和復雜功能。該系列主控還具有低功耗特性和較高性價比,易于獲取開發工具。
另外,機器人的視覺識別系統采用Jetson TX2,該系統采用基于Pascal 的多處理器GPU 架構和8 核ARM64 CPU,可提供超過1TFLOPS 的高性能計算能力,支持多種編程模型,包括神經網絡、圖像處理和流媒體編碼等,還支持多種傳感器、控制器和執行器的連接,并配備了豐富的開發工具和樣例,方便開發人員進行機器人應用的復雜開發。……
登錄APP查看全文