基于ELM改進K-SVD算法的多特征融合物體成像識別
2023-08-22 03:26:41楊玲玲
電子產品世界
2023年8期
楊玲玲

關鍵詞:K-SVD算法;算法改進;圖像識別
0 引言
作為一項重要可用于恢復樣品高分辨率和相位的技術,近幾年來傅里葉疊層成像(FP) 取得顯著進步[1,2]。樣品高分辨率成像在大視場下完成的主要原因是具有相對較為簡單的運行設施及FP 技術所需算法,實現的功能還包括三維重聚焦[3,4]。在處理稀疏矩陣時應用協同過濾算法,該算法基于內存分析完成建立,所以系統準確預測及高效運行均不能得到充分有效保障,此問題需將新算法引入完成處理,將原傳統算法進行改進。在推薦算法中早已應用SVD 技術,表現出較強的降維性能,結果顯示可顯著改善數據稀疏性[5]。最初在搜索潛在語義領域應用SVD 技術,該算法被應用于推薦算法中,確定維數完成預測前,需按照含有奇異值對角矩陣、用戶特征向量矩陣、低維項目特征向量矩陣分解高維用戶- 項目評分矩陣,維數確定需結合奇異值大小及數量[6]。
本文獲取ELM 算法采用K-SVD 算法改進處理實現,并成功應用于多特征融合物體成像識別領域。
1 ELM改進K-SVD算法
1.2 訓練ELM算法
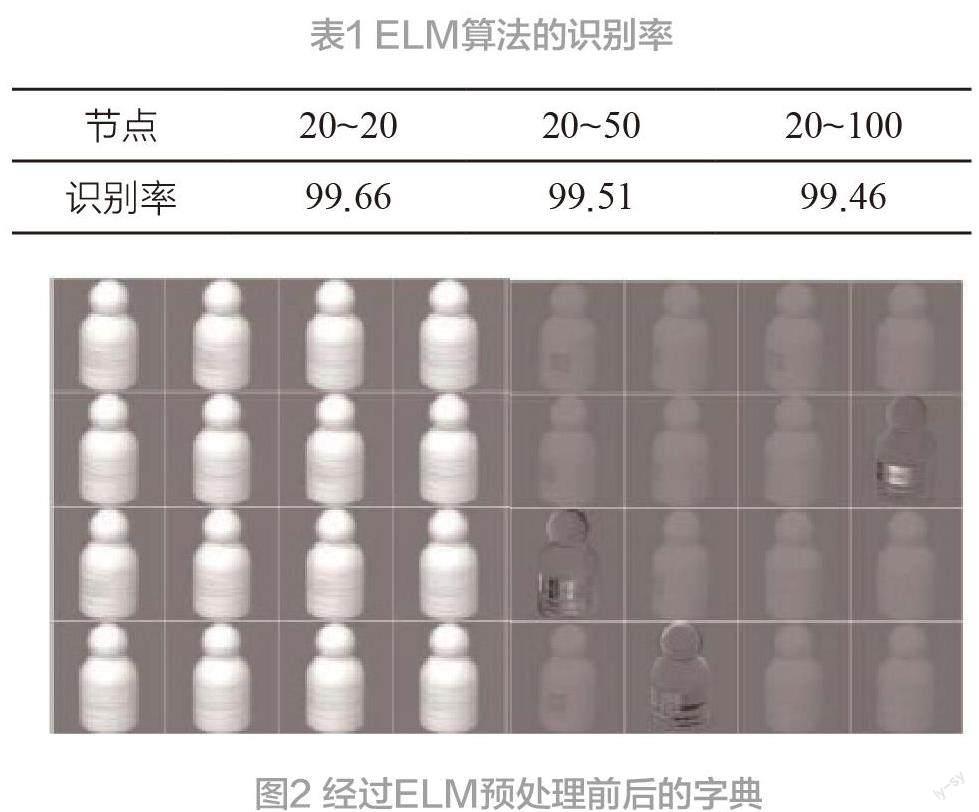
訓練DELM-AE 算法的流程圖如圖1 所示。在測試樣本稀疏編碼過程中,所利用字典選用全部的測試樣本,測試樣本標簽值的判定則需依據重構誤差最小準則。
訓練算法數據傳輸模式在隱含層及輸入均選用全連接模式,學習參數用β 表示。同時選用單隱層ELM 算法解析算法各層及前一層,有利于訓練成本的大幅降低,單隱層ELM“輸入層”用“輸出層”代替。參考此方法可完成極限學習機網絡模型的構建,實現自編碼功能,訓練參考以上步驟進行。……
登錄APP查看全文