帶式輸送機分布式安全監測方案及可行性分析
2023-08-24 08:17:02寧文淑
山東煤炭科技 2023年7期
寧文淑
(晉能控股煤業集團四臺礦,山西 大同 037003)
隨著四臺礦的長期開采,輸送帶在運輸中存在的超速、跑偏、堆煤、煙霧等問題,導致設備運行與安全無法得到保證,增加了生產過程中的安全隱患[1-3]。通過分析輸送機已出現的安全隱患,設計安全監測系統方案,監測故障觸發報警功能,降低故障發生率,減少損失。
1 帶式輸送機分布式監測分站硬件設計
分布式監測分站在帶式輸送機的頭尾及中間都設置了相應的傳感器,負責監測相關傳感器進行采集、預處理和傳輸。分布式監測分站集成了3 路編碼器信號、1 路拉力傳感器信號、6 路測力傳感器信號、2 路跑偏傳感器信號、1 路漏料檢測器信號、1 路溫度傳感器信號、1 路堆煤傳感器信號、1 路煙霧傳感器信號的采集電路,實現對多種信號類型的采集與預處理。分布式監測分站傳感器信號采集方案如圖1 所示。
2 帶式輸送機分布式監測分站軟件設計
分布式監控分站主要完成以下幾個功能:1)對編碼器的信號進行采集、計算和調整;2)對拉力傳感器的頻率信號進行采集和測定,并將其轉換為拉力數值;3)收集獲得6 個開關的信號;4)對測力傳感器中的模擬信號進行了采集和濾波;5)用無線方式傳輸所獲取的數據,并帶有初步的處理結果。采用結構化、模塊化、子程序化等方法對程序進行設計,以方便程序的調試與修改。在圖2 中給出了分站的主要程序流程。
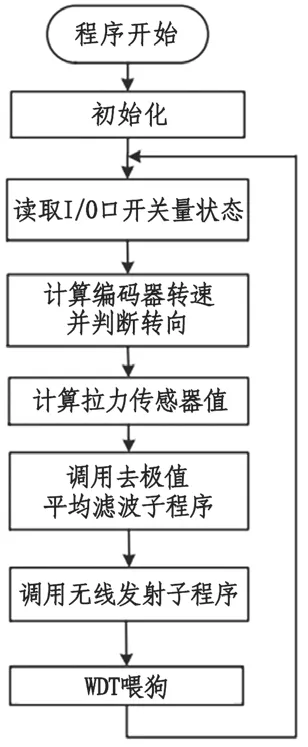
圖2 分布式監測分站主程序流程圖
1)主控程序。主控程序先對MCU 進行初始化,包括對I/O 端口、ADC、T/C、外部中斷等信息,再對各子序及中斷進行初始化調試,如此循環反復。
2)編碼器信號的獲取和速度的計算。BQH-12ZD 型編碼器具有400 脈沖/轉的分辨能力,即編碼器每轉一次可以輸出400 次的脈沖。所以,編碼器的旋轉速度只需測得脈沖的頻率即可得出。
三種編碼器的工作原理都是通過外部中斷輸入得到輸出信號,基于編碼器來獲得轉速數據。將T/C2 計數器設定為連續運行狀態,200 ms 為時間間隔中斷一次,然后將中斷的數量累積起來。設定一個由下降邊緣觸發的外部中斷INT0,使其在A 相位的脈沖發生下降邊緣時發生中斷。在一個中斷程序中,當一個B 相位的脈沖(PD4 端口)被檢測到是一個高電平時,該累積器會被加1;當探測到B相位的脈沖處于低水平時,將該累積器減去1。在累積器的絕對值(也就是定義的脈沖數目)為300的情況下,備份中斷,讀出T/C2 寄存器TCNT2 的數值,在主程序中計算旋轉速度。其中,編碼器轉速=300/(T/C2 兩次中斷次數之差×200 ms+TCNT2當前值×T/C2 作為基準時),編碼器轉速=脈沖頻率/編碼器分辨率。當累積器值為正值時,則該編碼器為正方向旋轉,當該累積器值為負時,則該編碼器為負方向旋轉。
3)拉力傳感器信號的采集和拉力數值的計算。AVR MCU 中的T/C1 是一種16 位增強的計時/計數器,具有捕獲功能,在測頻過程中,不僅可以用1 臺(T/C1)來實現周期循環的測定,同時,測定結果也具有很高的精度。拉力傳感器的觸發信號,由管腳ICP1(PD6)輸入,將T/C1 設定為傳統計數器模式。當ICP1 上的輸入信號由低變高時,將TCNT1 的計數值同步拷貝到寄存器ICR1,請求中斷,并由中斷程序記錄捕捉時間,在主程序中計算出張力傳感器的值。將兩個ICR1 之差與計數脈沖的周期相乘,得到輸入信號的一個周期,從而求出該信號的頻率。采用這種方法,通過對輸入信號頻率的線性變換,就可以得到傳感器的拉力值。
4)測力傳感器信號的獲取和處理。MCU 的ADC4(PA4)端口將測力傳感器的電壓信號輸入到ADC4(PA4)端口,用于對負載檢測器的模擬-數字變換。針對其測量結果易受塊狀材料撞擊而導致的擾動,提出了一種極值平均濾波算法,它不僅能消除擾動,還能過濾掉隨機擾動。
3 帶式輸送機分布式安全監測運行機制
3.1 打滑與斷帶監測

圖3 打滑與斷帶監測程序流程圖
當拉力傳感器輸出的是0 Hz 的頻率信號時就證明傳感器故障。因為通常其輸出的信號頻率在200~1000 Hz 之間。但是所測拉力為0 Hz 時,傳感器還是有信號輸出的。當改向滾筒轉速檢測為0 時,并且在輸送帶沒有斷帶的情況下,就證明滾筒卡死。管理員根據實際運行中的輸送帶張力以及滑差率的變換趨勢來判斷故障是否發生或是將要發生。滑差率與帶速的計算要依據編碼器的轉速,輸送帶張力的計算依據張緊裝置鋼絲繩拉力,計算出的數值要實時體現在前面板上,并且實時更新滑差率和輸送帶張力的變化曲線。當監測參數不在正常閾值范圍內,對應的故障指示燈亮并進行報警。
3.2 縱向撕裂監測
縱向撕裂監測是以輸送機運行中輸送帶是否有發生撕裂狀況為標準,以漏料與壓力的檢測結果作為判斷依據。當檢測到托輥受壓超限并持續一段時間或漏料兩種情況時則可判斷為縱向撕裂故障。在輸送帶發生撕裂前,托輥會受壓超限至少300 ms 以上,所以以300 ms 內三組緩沖托輥所受總拉力和的積分值作為判斷輸送帶撕裂的依據[4]。當有附加壓力時,張力和的積分逐漸增大,達到最大值,直到輸送帶斷裂后,積分值開始逐漸減小,甚至由于物料泄漏,使該值小于正常值。當有附加壓力時,張力和立即增加,一段時間后由于輸送帶破裂而減少。
3.3 跑偏與堆煤監測
堆煤與跑偏傳感器的輸出是開關信號,正常情況下傳感器輸出高電平,當輸出低電平時則證明有故障發生。正常時0x01,故障時則是0x00。輸送帶共設有6 路跑偏傳感器,分別代表機頭、機尾以及中間的左右跑偏;堆煤傳感器設有2 路,分別代表機頭堆煤和溜槽處堆煤。當某個傳感器輸出低電平即LabVIEW 讀取的數據是0x00 時,則表明有故障發生,對應的故障指示燈亮并進行報警。
3.4 火災監測
在輸送機的傳動滾筒及驅動裝置上安置溫度與煙霧傳感器,以便于對輸送帶的火災監測。運行中輸送帶打滑可能會導致火災,所以將溫度傳感器的報警值預設在3 檔70 ℃。當運行中傳動滾筒溫度超出預設值,溫度傳感器輸出低電平即LabVIEW讀取的數據是0x00 時,則表明有故障發生,要進行超溫報警;同樣,煙霧傳感器輸出低電平時也要進行煙霧報警。
4 可行性分析
4.1 測試方案
安全監控軟件主要包括數據的采集、顯示和存儲以及故障監控與預警。在試驗過程中,用筆記本電腦代替工控機來運行LabVIEW 監測程序構建一個虛擬串口,以串口調試助手為基礎,按照串口數據包的要求格式,向虛擬串口發送一組數據,對采集到的輸送機狀態信息進行模擬分析,然后運用設計的安全監測程序從該虛擬串口讀取數據,并對其進行驗證。
通過試驗,分別對輸送帶的正常運轉和因張緊力不足而引起的滑移進行了模擬,并對仿真結果進行了驗證。
4.2 結果分析
假定正常運轉時,輸送帶速度為2.5 m/s,兩個傳送滾筒的直徑都設定為1 m,頭、尾轉向滾筒的直徑都設定為0.8 m。結果表明,輸送帶的拉力、滑差都在允許的合理范圍之內,機器沒有發出警告預警,所有的參數都處于正常值。在張緊力不夠的情況下,容易出現打滑現象,對應的張緊力曲線呈下降趨勢,逐步降到張緊力的下限值以下,滑差速率逐步增加,直至升到一級的下限以上;拉力不夠、一級滑移故障指示燈亮,故障預警信號在接口上出現;其他各項參數都是正常的。
總之,帶式輸送機分布式安全監測程序可以對有關故障展開監測和預警,還可以顯示出相應的數據,基本達到了設定的目標。
5 結論
針對四臺礦帶式輸送機的輸送帶在運行中出現的故障,設計了安全監測系統方案,結論如下:
1)研究了帶式運輸機安全監測系統的硬件方案,選擇了合適的分布監控分站,基于傳感器信號的數據采集,最終確定了分站的設計方案。
2)基于串口調試助手,將數據傳輸到虛擬串口,對帶式輸送機正常工作和故障出現的兩種情況進行測試,同時對主站LabVIEW 的安全監測程序進行了試驗。試驗結果證明:所設計的監測程序可以實現對故障的判斷與預警、數據的存儲與查詢,從而達到設計目標。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34