新能源汽車高壓部件CAN總線故障診斷分析
2023-08-27 15:36:03賈延林林浩杰許俊杰
汽車電器 2023年8期
賈延林 林浩杰 許俊杰

【摘? 要】新能源汽車的高壓部件是新能源汽車區別傳統汽車的主要部件,在新能源汽車運行過程中起著重要作用,而高壓部件之間的通信是基于CAN總線系統。以吉利EV450為例,分析新能源高壓部件之間CAN總線的故障,為新能源汽車的維修提供一定的參考。
【關鍵詞】新能源汽車;CAN總線;故障分析
中圖分類號:U469.72? ? 文獻標志碼:B? ? 文章編號:1003-8639( 2023 )08-0014-03
Analysis of CAN Bus Fault Diagnosis for High Voltage Components of New Energy Vehicles
JIA Yan-lin,LIN Hao-jie,XU Jun-jie
(Department of Vehicle Engineering,Jinzhong Polytechnic College,Jinzhong 030600,China)
【Abstract】High voltage components of new energy vehicles are the main components of new energy vehicles which are different from traditional vehicles. They play an important role in the operation of new energy vehicles. The communication between high voltage components is also based on CAN bus system. Taking Geely EV450 as an example,this paper analyzes the breakdown of CAN bus between new energy high-voltage components,and provides some reference for the maintenance of new energy vehicles.
【Key words】new energy vehicles;CAN Bus;failure analysis
隨著環境污染和能源危機問題的日益突出,新能源汽車已成為當今汽車工業發展的重要方向。在政策的引導下,中國新能源汽車的保有量也達到了新的高度,學習對新能源汽車的維修也迫在眉睫。新能源汽車與傳統汽車相比有了較大的變化,特別是高壓部件的加入,主要有動力電池、車載充電機、直流轉換器、驅動電機等,這些部件是傳統車上所沒有的,而它們之間的信息通信依然使用的是CAN總線系統,即所謂的新能源CAN。文中以吉利EV450為例,分析新能源汽車高壓部件之間的CAN總線故障問題。
1? CAN總線線路
CAN(Controller Area Network,控制器局域網絡),由于其高性能、高可靠性及獨特的設計,越來越受到人們的重視[1]。CAN總線是車內電子裝置中的一個獨立系統,就本質而言,CAN總線就是數據傳輸線路,用于在控制單元之間進行信息交換[2]。
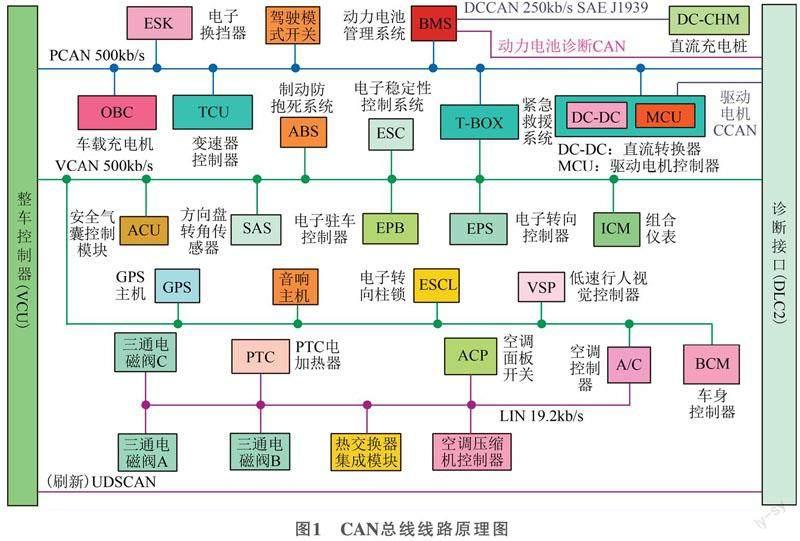
圖1展示了吉利EV450的CAN總線線路原理圖,從圖中可以看出吉利EV450有P-CAN和V-CAN兩套CAN總線系統,而兩者之間通過整車控制器VCU進行數據轉換并相互通信。其傳輸速率達500kbit/s,屬高速CAN。P-CAN局域網中包含有:動力電池管理系統BMS、車載充電機OBC、直流轉換器DCDC、驅動電機控制器MCU等模塊。通過測量發現P-CAN局域網中的終端電阻在動力電池管理系統BMS和驅動電機控制器MCU中。如果P-CAN總線或控制單元出現故障,將導致VCU無法接收和發送數據信息,致使整車高壓控制、車輛驅動控制不受管控,各控制單元之間無法獲知當前車輛狀態信息,進而關閉內部的執行功能,造成整車高壓上電失敗、車輛無法運行等故障。
2? CAN總線機理
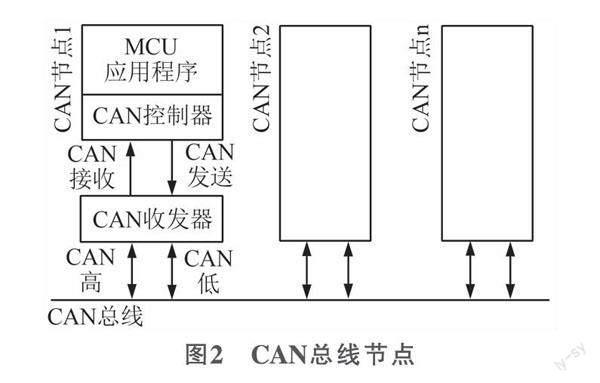
CAN總線上的每個節點(控制單元)能獨立完成網絡數據的交換和測控任務。如圖2所示,每個節點中包括有收發器、控制器和MCU。其中收發器直接和總線相連,具備發送和接收信息的功能,主要進行物理電平和邏輯電平的轉換。發送時,將上層傳遞下來的二進制數據流轉換成電壓信號傳輸到總線上;接收時,將總線電壓信號轉變成二進制數據流傳到上層。
CAN總線的數據傳輸實質是通過總線上的電平變化傳輸的。高速CAN總線中,差分信號高電平用CAN-High表示,電壓3.5V;低電平信號用CAN-Low表示,電壓為1.5V;差分電壓為2V,此時,總線為顯性位。差分信號的高電平信號和低電平信號均為2.5V時,差分電壓為0V,總線為隱性位。圖3為CAN收發器轉換信號示意圖。
在CAN網絡系統中,CAN控制單元中的芯片、電阻、二極管等電子元器件以及CAN總線線路,任何地方出現故障都將導致CAN總線上的電平變化,顯性電平和隱性電平都會發生變化,最終導致總線上的信息無法傳輸。而總線電平的變化與CAN收發器內部電路有著重要的關聯,圖4展示了CAN收發器內部的示意電路圖。
3? 故障分析
CAN總線系統具有自診斷功能,用診斷儀可以讀出與CAN總線相關的故障,對于高速CAN故障,往往會記錄通信失敗或失效等故障信息。根據故障記錄,可快速、準確地排除故障。CAN總線正常工作的前提條件是車輛在任何工況均不應有CAN總線故障記錄[3],所以每次確認故障排查完后,必須重新啟動車輛,更新故障顯示的內容。
CAN總線常見的故障主要有CAN-H和CAN-L的線路斷路、短路、虛接等故障。CAN總線出現故障時,需要用示波器測量CAN-H和CAN-L的信號波形,通過波形的變化分析故障所在部位及故障原因。
文中通過教學設故平臺,分別對BMS模塊的CAN-H和CAN-L兩根線路進行斷路、短路、虛接、互短、對搭鐵短路等多種故障設置,從圖5中可看出,BMS模塊中PCAN的CAN-H、CAN-L對應的針腳分別是3和4。用示波器同時測量BMS的3、4號針腳的信號波形圖,進而分析CAN總線故障機理。圖6為正常狀態BMS中P-CAN總線的信號波形圖。
3.1? 斷路故障
CAN-H斷路時,從圖7中可以看出,CAN-H和CAN-L的隱性信號電壓仍然是2.5V,CAN-H的顯性電壓有所增大,CAN-L的顯性電壓有所降低。這是因為在隱形狀態時,并未影響CAN 收發器中原有電路的電壓分壓大小,兩端的輸出電壓一樣。圖8中,CAN-L斷路時,CAN-H和CAN-L信號波形變化幅度較大,這是因為有反射波的影響,造成電壓放大失真。
3.2? 短路故障
CAN-H對搭鐵短路時,故障波形如圖9所示。CAN-H導線的電壓為0V,CAN-L導線的電壓略大于0V,這是因為有終端電阻的存在,將CAN-L的電壓有所拉高。CAN-L對搭鐵短路時,故障波形如圖10所示。CAN-L導線的電壓為0V,CAN-H導線的隱形電壓略大于0V,而顯性電壓大于3.5V,這也是由于終端電阻的存在造成的電壓分布不同。分析此類波形時,主要看總線波形圖中,是否有一根信號線的隱形和顯性電平都接近0V,只有當CAN-H對搭鐵短路時,其信號電平才接近0V,否則就是CAN-L對搭鐵短路。
當CAN-H和CAN-L互短時的波形如圖11所示,CAN-H和CAN-L的信號電壓不管隱形電平還是顯性電平,都接近2.5V。
除上述短路故障外,還有CAN-H和CAN-L對電源正極短路的故障,其波形分析較為簡單,哪條線與電源短路,哪條線的電壓就會被拉高到電源電壓近12V,而另外一條線的電壓則低于電源電壓,這是由于模塊中有終端電阻的存在進行了分壓。
3.3? 虛接
CAN-H線虛接后,如圖12所示,由于有電阻的加入,使得線路中的電流減小,CAN收發器元電路中的分壓減小,虛接電阻前端測試出的信號電壓增大。此時,CAN-L的信號波形隨著CAN-H波形的變化趨勢而發展。CAN-L虛接后,如圖13所示,CAN-H信號顯性電壓有所提高,CAN-L顯性電壓向反方向變化,有較為明顯的變化。虛接故障的設置是在電路中串接了一個1kΩ的電阻。接入的電阻值越大,顯示的電壓值變化越大。分析此類波形時,要注意看信號電壓是否有向反向電平變化的趨勢,如有,則線路中存在虛接。
4? 總結
通過對吉利EV450網絡總線的了解,對P-CAN總線中的BMS模塊進行了多種線路故障設置,并從信號波形圖中分析故障原因,總結變化規律,為新能源汽車的維修提供一定的參考。
針對上面所列的各種線路故障,在排查的過程中,可以將CAN總線中的節點依次拔除,同時注意觀察示波器中的波形變化。當故障線組被拔下后,信號波形恢復到了正常波形。
參考文獻:
[1] 曹劍馨,付安英,張金博,等. 基于BP神經網絡的CAN總線網絡通信性能評估[J]. 信息技術與信息化,2021(8):166-168.
[2] 劉春暉,劉光曉. 汽車車載網絡技術詳解(第三版)[M]. 北京:機械工業出版社,2019.
[3] 弋國鵬,魏建國. 電動汽車控制系統及檢修[M]. 北京:機械工業出版社,2022.
(編輯? 楊? 景)
作者簡介
賈延林(1984—),女,碩士,講師,研究方向為職業教育(汽車方向)。