50 000 kN 液壓支架試驗臺中梁復合定位調高方法研究
2023-08-29 06:51:24吳成峰萬傳旭張建卓
礦山機械 2023年8期
吳成峰,萬傳旭,王 濤,陳 策,張建卓
1山東兗礦智能制造有限公司 山東鄒城 273500
2遼寧工程技術大學機械工程學院 遼寧阜新 123000
液壓支架試驗臺是測試各種液壓支架操作性能、密封性能、支護性能、適應性能、讓縮性能、結構強度和疲勞壽命是否達到國家或國際標準的重要裝備。在對液壓支架進行不同項目的壓架試驗時,液壓支架試驗臺中梁需要移動到規定高度,并通過銷軸穿過試驗臺承載立柱銷軸孔和中梁銷軸孔進行固定,在插拔銷軸之前,需要確保中梁上的銷軸定位孔中心與立柱上對應的銷軸孔中心重合,才能保證順利插拔銷軸,在插拔銷時不損傷銷軸或銷軸孔表面。
國內學者對中梁高精度定位展開了深入研究。劉欣科[1]研制了液壓支架試驗臺升降平臺精準定位控制系統,將位移傳感器檢測到的位置與節流閥流量相結合,保證升降平臺的定位精度。沙寶銀等人[2-3]采用高精度齒輪分流馬達為 4 根升降液壓缸分配流量,并通過位移傳感器反饋偏差,實現中梁高精度定位調高。趙忠輝[4]考慮負載不均勻特性,每根升降液壓缸設置比例閥,通過位移傳感器的數據得到液壓缸間的位移偏差,通過工控機實現對每根升降液壓缸的單獨控制。王陽陽[5]將視頻識別技術應用到液壓支架試驗臺調高系統中,采用 SolidWorks 中的虛擬相機對構建的三維模型虛擬錄像,通過對圖像的灰度曲線特征判斷中梁運動是否到位。
以上學者大都采用位移傳感器解決液壓支架試驗臺中梁調高精確定位問題,但本次設計的 50 000 kN 液壓支架試驗臺加載立柱高度達到 17 m,加之大量程位移傳感器精度有限,特別是試驗臺立柱高度受溫度影響,存在熱脹冷縮現象,受環境溫度影響最大誤差達到約 6 mm,而所設計的銷軸、銷軸孔配合間隙只有 2 mm,所以僅僅通過位移傳感器進行閉環控制精度有限,使用每個銷孔固定高度值作為位移傳感器的定位標準不能滿足定位精度要求。基于上述問題,提出 50 000 kN 液壓支架試驗臺中梁復合定位調高方法。首先利用拉線位移傳感器進行粗定位,再通過相機采集銷軸定位孔與立柱銷軸孔配合關系的圖像,對其進行圖像增強處理,使用自適應閾值的邊緣檢測算法提取銷軸定位孔與立柱銷軸孔的邊緣,計算二者圓心在豎直方向的高度差,以此為基準完成對中梁調高的精確定位控制。
1 50 000 kN 液壓支架試驗臺中梁復合定位原理
在插銷之前,判斷中梁是否運動到位十分重要。如果銷軸定位孔圓心與立柱銷軸孔圓心不重合,進行插拔銷時會磨損銷軸與銷軸孔表面 (見圖1),減少設備壽命。
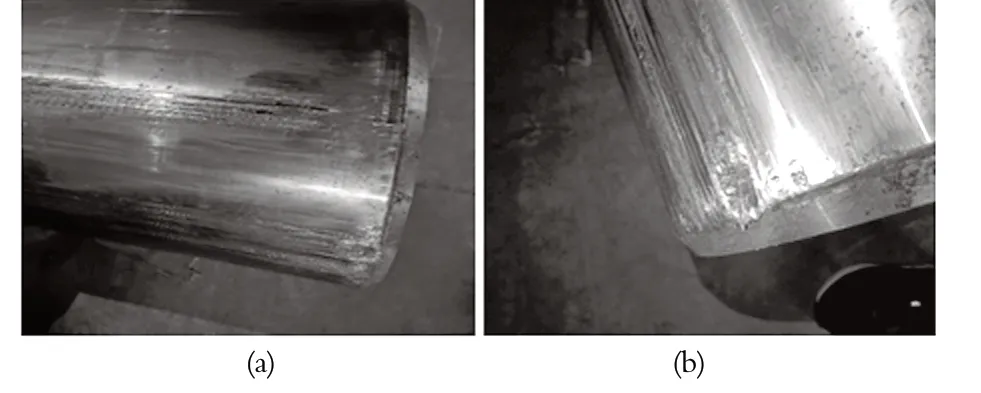
圖1 銷軸表面損傷Fig.1 Surface damage of pin
50 000 kN 液壓支架試驗臺中梁復合定位調高系統如圖2 所示,由分布在試驗臺 4 根立柱旁的升降液壓缸通過 4 個伺服閥獨立調節,中梁 4 角分別安裝 4 個拉線位移傳感器進行位移反饋閉環控制。由于采用 4 處獨立位移閉環控制,避免中梁在調高過程中受力不均造成的運動偏差,保證 4 個缸運動同步。當通過位移傳感器控制達到設定高度后,控制系統將位移反饋由拉線位移傳感器轉換為機器視覺檢測位移反饋,通過相機檢測銷軸定位孔圓心與立柱銷軸孔圓心的位置偏差 Δx,實現中梁的精確定位,消除溫度效應和傳感器測量誤差,保證插拔銷順利進行。
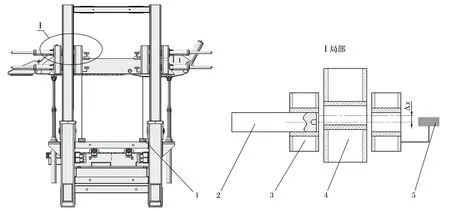
圖2 50 000 kN 液壓支架試驗臺中梁復合定位調高系統結構Fig.2 Structure of composite positioning and height adjustment system of middle beam for 50 000 kN hydraulic support test bench
系統所用相機分辨率為 2 560×1 440,則機器視覺定位精度可由下式得到:
式中:ξ為單位像素定位精度;F為物體距離透鏡中心的距離,F=800 mm;d為成像平面的高度,d=3.6 mm;f為透鏡的焦距,f=6 mm。計算可得單位像素的定位精度ξ=0.33 mm。
液壓支架試驗臺立柱銷軸孔間距為固定值,中梁調高過程中位移傳感器以此定值倍數加第 1 孔中心高度作為立柱每個銷軸孔的高度值。復合定位調高方法采用的控制策略為:首先設計一個閾值,如 10 mm,當中梁實際位移與目標位移差值大于此閾值時,將支路選擇變量b值置 1,采用拉線位移傳感器進行閉環控制;小于閾值時,b值置 0,采用機器視覺精確定位方法介入控制,對中梁調高進行精定位,控制流程如圖3 所示。

圖3 控制流程Fig.3 Control process
2 機器視覺精確定位方法
考慮到現場實際情況,在視覺定位過程中易出現光照不均現象,若直接對相機獲取的原始圖像進行邊緣提取,效果較差,因此采用 Retinex 理論改善圖像光照不均現象,降低光照不均對特征提取的影響。對增強后圖像采用自適應閾值的 Canny 邊緣檢測方法進行邊緣提取,提取邊緣點坐標。通過銷軸定位孔和立柱銷軸孔在圖像中運動范圍固定的先驗知識篩選數據點,然后通過最小二乘法擬合銷軸定位孔特征圓與立柱銷軸孔特征圓,以二者圓心坐標差值作為位移偏差反饋量,將此反饋信號輸入液壓伺服閉環控制系統中,對中梁進行精確定位控制。視覺定位流程如圖4 所示。
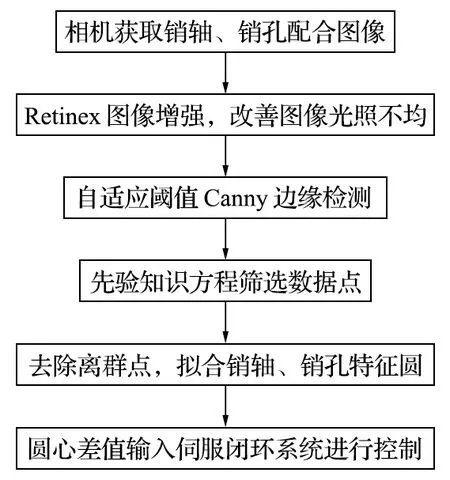
圖4 視覺定位流程Fig.4 Visual positioning process
2.1 Retinex 圖像增強算法
相機工作時受環境光照不均的影響,獲得的圖片質量參差不齊,嚴重影響后續的邊緣識別。針對該問題,采用多尺度 Retinex (Multi-scale Retinex,MSR) 算法對圖像進行處理。
Retinex 理論認為物體顏色只與自身對不同波長光的反射能力有關,光照強度只影響圖像灰度值范圍,故物體自身的固有屬性不受外界光照的影響。Retinex 增強理論的流程為估計出原始圖像的低頻照度圖像,從原始圖像中減去照度圖像即可得到包含高頻分量的反射圖像。單尺度 Retinex 算法 (Single-scale Retinex,SSR) 公式[6]為
式中:(i,j) 為第i行第j列的像素;Rk為k通道的反射圖像;Gk為k通道的原始圖像;Zk為k通道的照度圖像。
照度圖像Zk通常由低通高斯函數與原始圖像進行卷積運算得到,則上式變為
式中:F(i,j) 為低通高斯函數;*為卷積運算;σ為尺度參數。
尺度參數σ對單尺度 Retinex 算法的圖像增強效果影響較大,σ取較小值時,圖像邊緣保持較好但顏色容易失真;σ取較大值時,圖像不易失真,但細節易丟失,圖像不清晰。筆者采用 MSR 算法[7-8],利用多尺度分析的思想,對圖像進行不同尺度的分析和處理,使得算法對不同尺度下的圖像細節能夠有針對性地進行處理,從而更好地保留圖像細節和紋理。其算法公式如下:
式中:wn為與低通高斯函數Fn(i,j) 相對應的權重系數;n為低通高斯函數個數。
使用 MSR 算法對相機獲取的圖像進行增強處理,效果如圖5 所示。
2.2 自適應邊緣檢測與特征圓擬合
邊緣檢測是識別承載立柱銷軸孔、銷軸定位孔特征圓的關鍵。Canny 算法[9]常用于檢測、提取圖像邊緣,但由于該算法需要手動設置高、低閾值,難以適應復雜多變的光照條件,因此使用 Otsu 算法[10]自適應尋找最佳分割閾值。該算法將圖像分為背景與前景,當閾值為T時,前景圖像平均灰度為g1,背景平均灰度為g2,兩者占圖像比例分別為p1、p2。類間方差表達式為
式中:?為類間方差。
當類間方差 ? 值最大時,對應的閾值T為高閾值TH,而低閾值TL=TH/2。邊緣檢測效果如圖6 所示。

圖6 邊緣提取效果對比Fig.6 Comparison of edge extraction effect
由圖6 可知,使用自適應閾值得到的圖像邊緣相比于使用固定閾值的方法,邊緣信息更加豐富,有利于后續對特征圓進行提取。
使用先驗知識方程對檢測得到的邊緣數據點進行篩選,根據銷軸定位孔與立柱銷軸孔中心點在圖像中心附近的先驗知識,建立數學模型。當邊緣數據點符合該模型時,將其作為特征候選點,模型表達式為
式中:R1與R2為先驗方程的半徑邊界;w為圖像寬度;h為圖像高度;xm、ym分別表示像素m的坐標。
經測試發現,特征候選點中仍存在部分噪聲無法去除,影響特征圓邊緣擬合質量,降低了其定位精度。因此對特征候選點進行去噪處理。在處理分辨率為 2 560×1 440 像素的采集圖像時,數據點間距大于 5 pixel 及點群數量小于 5 的數據判定為離群點,將其剔除。
以銷軸定位孔識別為例,首先采用自適應邊緣檢測方法提取圖像邊緣,然后對提取出的邊緣數據使用先驗方程進行篩選,最后使用最小二乘法對銷軸定位孔進行特征圓擬合,特征圓識別流程如圖7 所示。
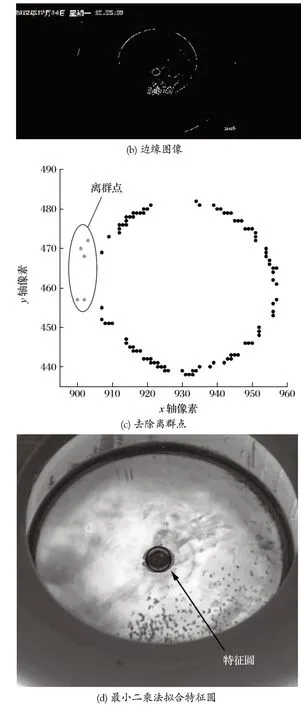
圖7 銷軸定位孔特征圓識別流程Fig.7 Process of identifying feature circle of pin positioning hole
圖7(a) 為原始圖像,圖7(b) 為經過圖像處理后的邊緣圖像,圖7(c) 為經過先驗方程篩選后的特征候選點,圖中 7(c) 淺色的數據點雖為特征候選點,但滿足離群點的判斷條件,因此被當做離群點剔除。利用最小二乘法對深色的特征點進行擬合,得到的銷軸孔特征圓如圖7(d) 箭頭所示。
3 試驗驗證
50 000 kN 液壓支架試驗臺中梁復合定位調高系統實物如圖8 所示。
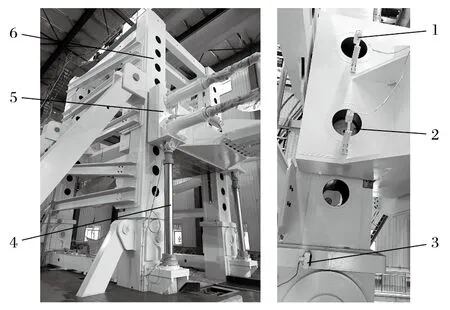
圖8 50 000 kN 液壓支架試驗臺中梁復合定位調高系統實物Fig.8 Physical object of composite positioning and height adjustment system of middle beam for 50 000 kN hydraulic support test bench
使用中梁調高復合定位方法對中梁運動過程中相機采集到的圖像進行處理,最終視覺檢測系統識別銷軸定位孔、立柱銷軸孔效果如圖9 所示,圖中右上角數值表示二者圓心坐標。視覺精定位方法可以在中梁運動過程中識別立柱銷軸孔與銷軸定位孔特征圓,擬合出二者圓心坐標。
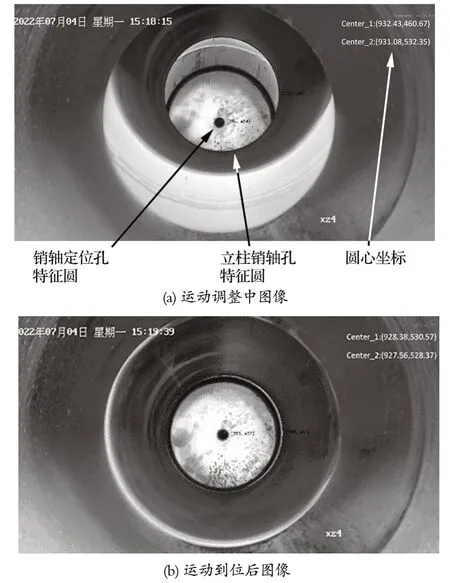
圖9 視覺精定位效果Fig.9 Precise visual positioning effect
由圖9 可知,該方法可以較好識別銷軸定位孔、立柱銷軸孔的邊緣,并實時計算其圓心位置,當二者圓心距離小于設定值 0.5 mm 時,認為中梁運動到位,可以進行插銷動作。
4 結語
針對 50 000 kN 液壓支架試驗臺中梁調高受溫度效應與拉線式位移傳感器精度的影響,無法單獨依靠位移傳感器實現中梁精確定位控制的問題,提出一種中梁復合定位調高方法。該方法以拉線位移傳感器作為粗定位基準,結合圖像處理方法完成中梁精確定位,并采用多尺度 Retinex 方法對圖像進行增強處理,使用自適應閾值的 Canny 邊緣檢測算法對立柱銷軸孔、銷軸定位孔進行邊緣提取,通過篩除后的數據點提取立柱銷軸孔和銷軸定位孔的圓心高度差作為液壓伺服控制系統的位移反饋偏差,完成中梁精確調高控制,控制精度達到 0.33 mm,保證了插拔銷順利進行。
