多車道機場航站樓車道邊停車容量研究*
2023-08-30 03:33:28張龍財劉明輝徐健平
艦船電子工程 2023年5期
張龍財 劉 斌 劉明輝 徐健平
(中國民用航空飛行學院機場學院 廣漢 618307)
1 引言
機場航站樓車道邊停車位的設置可有效提升旅客乘機的便捷度,但旅客流量的快速增加使得機場航站樓車道邊停車需求不斷增加,當現有的道路停車設施不能滿足逐漸增加的停車需求時,就會形成交通瓶頸,造成大范圍的交通擁堵,因此對機場航站樓車道邊停車容量的準確評估對于緩解交通擁堵和優化地面交通管理具有重要的現實意義。
已有許多國內外學者對機場航站樓車道邊的停車容量進行了研究,其中在停車容量計算的數學模型方面,主要采用宏觀方法,即將送客車輛作為一個整體來研究,主要采用的數學理論模型有排隊論[1]、時空軌跡理論[2]、間隙接受理論[3]、交織區理論[4]等,在微觀層面,利用仿真軟件[5]或者計算機語言編寫程序[6~7]對停車容量進行評估。航空業務量的快速發展,使得機場為滿足不斷增加的停車需求必須對車道邊進行改擴建,車道邊也從雙車道變成多車道[8],傳統用于計算車道邊停車容量的模型[9],理論性較強,且大都從宏觀角度出發,不能體現具有人車混行交通特性的復雜交通狀況,針對多車道不能動態考慮車輛變道停車行為對周圍車輛車速的干擾,不能真實地反映車道邊真實的交通狀況。
因此本文從微觀角度研究車輛個體行為,考慮送客車輛速度的瞬時變化以及變道停車行為,加入強制換道與自由換道選擇機制,改進STCA 模型[10]的換道規則建立多車道機場航站樓車道邊停車容量評估模型,并利用實測數據對模型的準確性進行驗證,最后驗證了停車道位于中間車道時對停車容量的影響。
2 航站樓車道邊送客車輛停車行為分析
機場航站樓車道邊(以下均指機場航站樓出發層車道邊)是指機場航站樓前供車輛停靠、通行,服務旅客下車的道路設施[11],通常由停車道、行車道以及過境車道組成,進入航站樓車道邊的送客車輛首先需要從行車道換道駛入目標停車位,停車以后進行旅客下車服務,同時在服務完成后,送客車輛換道再次駛入行車道,最后駛離車道邊。對于多條行車道的機場航站樓車道邊需要執行多次換道行為,才能進行停車下客服務,圖1 所示為雙行車道機場航站樓車道邊布局示意圖。

圖1 機場航站樓車道邊布局模式示意圖
3 多車道機場航站樓車道邊停車容量仿真模型
STCA模型僅適用于模擬分析雙車道的確定性單側換道問題[10],在單向三車道以上的多車道的元胞自動機仿真模型中,這種換道規則不再適用,因此本文在STCA模型基礎上加入強制與自由換道規則模擬多車道航站樓車道邊送客車輛司機的駕駛行為。
3.1 模型構建
送客車輛進入航站樓車道邊后,經歷換道停車和換道駛離兩個過程,由于航站樓車道邊人車混行的復雜交通特性,其中換道停車過程包括判斷換道停車條件、送客車輛速度位置更新兩個階段,換道駛離過程包括判斷換道駛出條件,產生換道動機,判斷換道間距條件三個階段,對應變量符號及表示含義如表1所示。
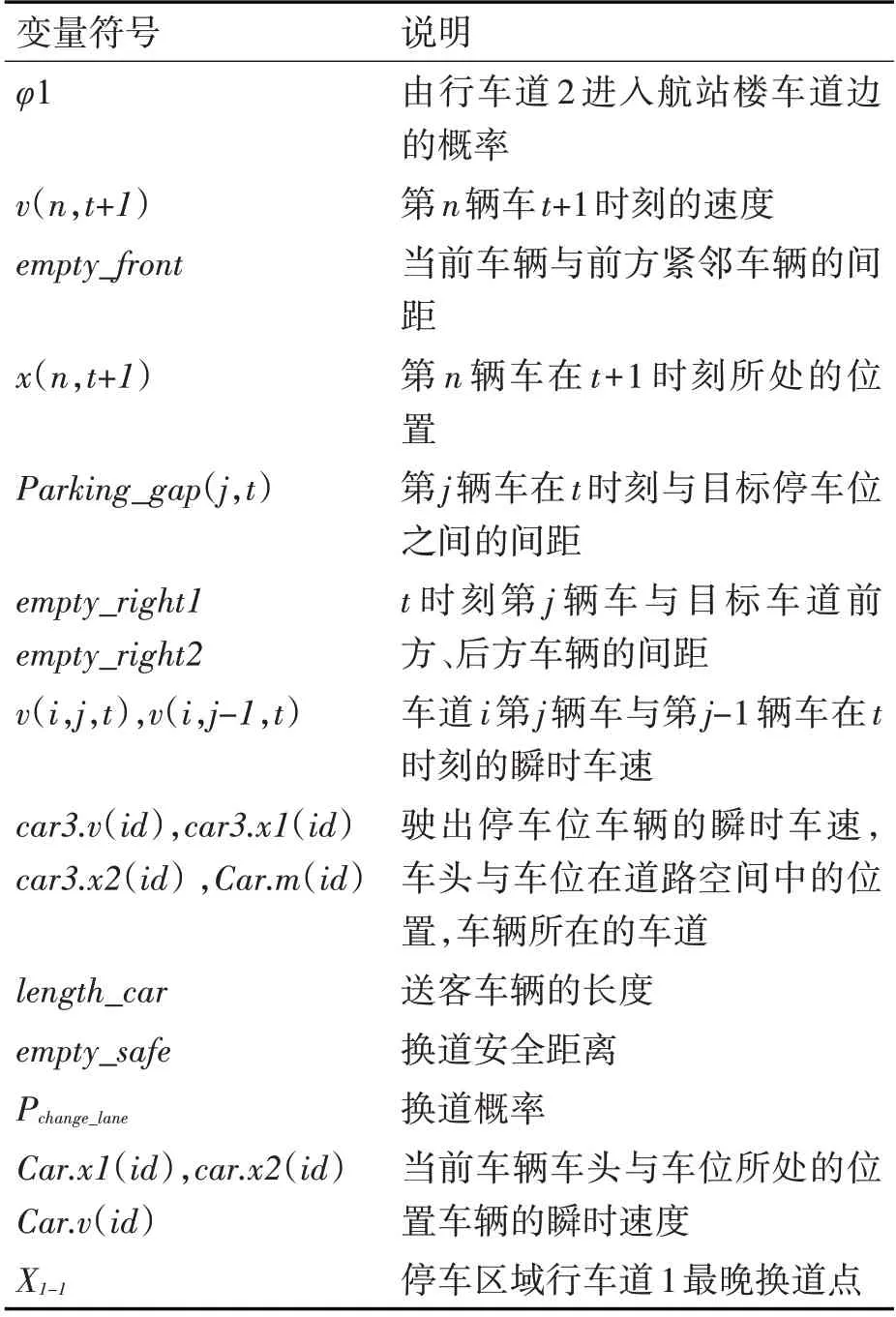
表1 模型變量符合及表示含義
3.1.1 跟馳規則
NaSch 模型作為元胞自動機中最經典的交通流仿真模型,通過四個簡單規則就可以模擬道路交通流的基本特征[12]。因此本文使用該模型模擬送客車輛在行車道上的跟馳過程。具體演化規則如下:
1)加速:V(n,T+1)→min(V(n,T)+1,Vmax)
2)減速:V(n,T+1)→min(V(n,T+1),d(n,T))
3)以概率p 隨機慢化:V(n,T+1) →max(V(n,T+1)-1,0)
4)位置更新:X(n,T+1) →X(n,T)n+V(n,T+1)
上式中:V(n,T+1),X(n,T+1)為T+1時刻車輛的速度及位置,V(n,T),X(n,T)為T 時刻車輛n 的速度及位置,d(n,T)為T 時刻車輛n 與當前車道前方緊鄰車輛之間的間距,其中,d(n,T)=X(n+1,T)-X(n,T)-Lcar,其中,Lcar 為送客車輛占據的單位元胞數量。
3.1.2 換道停車過程
1)判斷換道停車條件
針對內側行車道上的送客車輛進入車道邊后首先判斷與目標停車位之間的距離,當滿足式(1)和式(2)時,送車車輛進入停車位進行停車下客服務:
當不滿足式(1)和式(2)中的任意一個時,車輛執行跟馳規則,當不滿足式(1)時,為使車輛能夠快速停車,車輛采取怠速的方式,在下一次循環時,重新判斷。
進入航站樓車道邊的送客車輛都需要換道駛入停車位進行停車,因此每一輛車都必須執行換道行為,因此,當車輛滿足換道條件時,即式(3),車輛優先執行換道行為。
當車輛不滿足步驟1)的自由換道規則時,由于車道邊人車混行,道路交通狀況復雜,尤其在客流高峰時段,無法產生合適的換道時機,為準確模擬車道邊送客車輛的換道行為,當送客車輛駛入車道邊一定距離后,當車輛到達最晚換道點,即式(4),之后車輛采取停車方式,反之車輛采取降低車速的方式即式(5)。
2)送客車輛速度及位置更新
當內側行車道送客車輛滿足換道條件進入停車以后更新車輛狀態及停車位數量,同時記錄車輛停車開始服務時間,并隨機生成規定時間范圍內送客車輛的最短服務時間,規則如式(6)所示:
外側行車道送客車輛滿足換道條件,換道進入內側行車道,更新車輛的位置如式(7)所示,送客車輛的速度及位置按照跟馳規則進行更新。
3.1.3 換道駛離過程
送客車輛在完成下客服務后,駛出停車位進入行車道,根據道路當前環境狀況選擇換道或者直行,直至駛離車道邊。
1)判斷換道駛出條件
在停車服務完成后,送客車輛在滿足換道條件下,即式(8),直接換道進入行車道2;或者當送客車輛所在停車位前存在空閑停車位時,送客車輛可前行一段距離,然后向右前方行駛進入行車道,即滿足式(9),車輛由停車道駛入行車道2。
若不滿足駛出停車位條件,車輛只能在原停車位上進行等待,在下一次循環時,重新判斷。送客車輛進入行車道2 以后更新車輛狀態信息及停車位數量更新,即式(10)。
2)產生換道動機
當送客車輛再次進入行車道以后,車輛期望在滿足安全條件下快速駛離車道邊,當前方車輛不能滿足當前車輛對期望速度的追求時,就會產生換道動機,即式(11)和式(12)。
對于外側行車道車輛當滿足下述條件時,產生換道動機,即式(13)。
3)判斷換道間距條件
判斷換道車輛與目標車道前后緊鄰車輛間距是否滿足換道條件,即式(14)。當滿足換道條件后,更新車輛的位置狀態,即式(15),然后執行車輛跟馳規則,當車輛不滿足換道條件時,車輛僅執行跟馳規則。
因為送客車輛在駛出車道邊后,不存在車輛混行的交通狀態,車輛會以期望速度駛離車道邊,防止乒乓變道現象的產生,設置變道概率,在滿足換道條件下,同時滿足式(16),才能執行換道行為。
4 仿真驗證
4.1 數據采集
對某機場航站樓車道邊的規模進行實地觀測,獲得該機場航站樓車道邊及車輛狀態相關參數如表2所示。
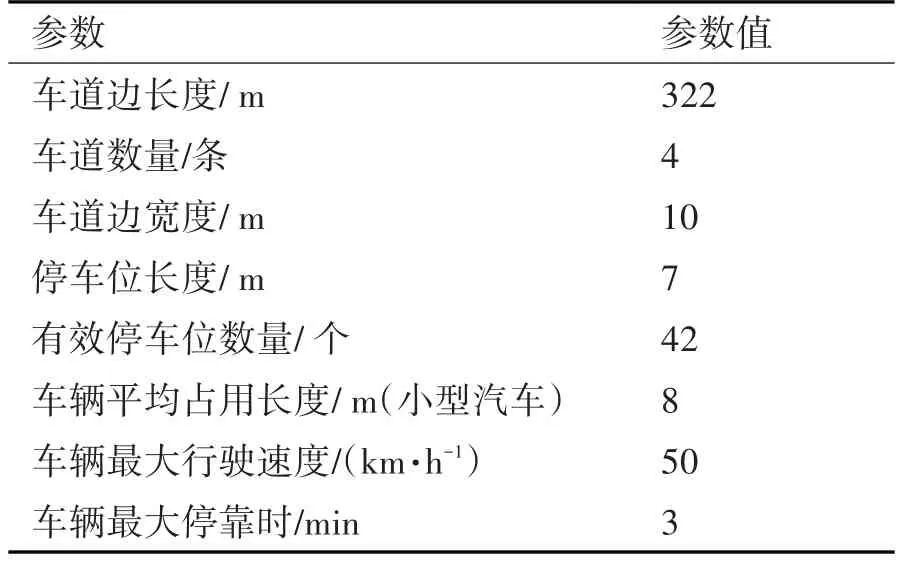
表2 航站樓車道邊布局及車輛狀態參數
4.2 仿真環境設置
本文構建模型采用開放式邊界條件,送客車輛駛出航站樓車道邊即駛離仿真系統。每次循環以概率p產生車輛隨機進入行車道1或者2,每輛車占據兩個元胞,停車落客時間設置為數據采集中最大與最小中的隨機值,基本參數設置見表3,為防止隨機因素產生的干擾,選取5000~8600 時間步的仿真結果作為停車容量的仿真值,并將10 次仿真結果的算數平均值作為有效仿真值。
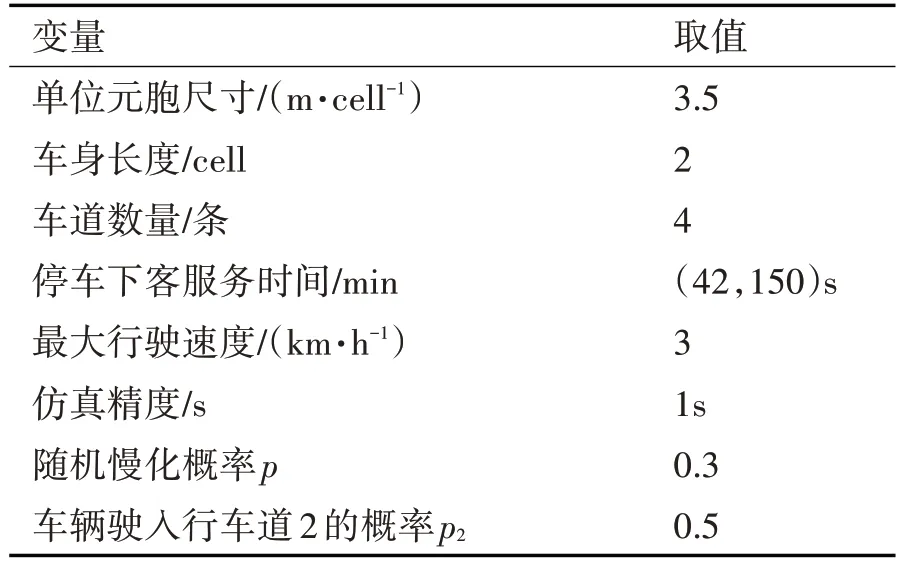
表3 仿真參數設置
表4統計了在5000~8600時步的航站樓車道邊停車容量的10 次仿真結果的算數平均值及與實測值之間的誤差,可以看出本文所建模型的仿真結果與實際觀測結果的誤差較小,因此本文構建的車道邊停車容量仿真模型可有效計算雙行車道的車道邊停車容量。

表4 仿真結果與實測數據對比
4.3 停車道的不同位置對停車容量的影響分析
為進一步研究停車道的不同位置對停車容量的影響,設置停車道位于內側車道與中間車道兩種方式,分析其對停車容量的影響,停車道位于中間車道的航站樓車道邊布局模式如圖2所示。

圖2 停車道位于中間車道的航站樓車道邊布局模式示意圖
停車道位于內側車道和中間車道的仿真結果對比如圖3 所示。由圖3 可知,當停車道位于中間車道時,停車容量明顯增加,因為當停車道位于中間車道時,送客車輛由一側行車道換道駛入目標停車位,當服務完成后,送客車輛直接駛入另一條行車道,直至駛離車道邊,避免了駛入與駛離停車位車輛之間的沖突,因此在車道邊規模不變的前提下,可有效提升航站樓車道邊停車容量。
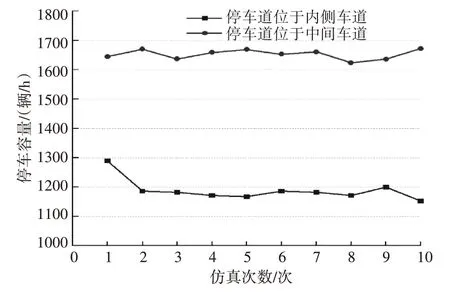
圖3 停車道的不同位置導致的停車容量變化對比圖
5 結語
為完善多車道機場航站樓車道邊停車容量的評估方法,通過對機場航站樓車道邊送客車輛的停車行為進行分析,基于改進的STCA 模型構建多車道機場航站樓車道邊停車容量仿真模型,通過實測數據驗證了模型的準確性,最后利用本文模型驗證了當停車道位于中間車道時對停車容量的影響。仿真結果表明,在車道邊規模不進行擴建的前提下,可停車道位于中間車道可顯著提升機場航站樓車道邊停車容量。在后續的研究中還應在模型中加入大型客車專用車道,并對其具體駕駛特征進行深入分析。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技信息(2016年14期)2016-07-31 21:16:32