基于U-net和隨機森林的齒輪箱振動時頻分析和故障診斷*
2023-08-31 02:47:56張品楊陳長征
機電工程 2023年8期
張品楊,陳長征
(沈陽工業大學 機械工程學院,遼寧 沈陽 110870)
0 引 言
行星齒輪箱作為風力發電機的關鍵部件之一,其具有結構緊湊、傳動比大、運行平穩等特點[1]。因為風力發電機常常處于惡劣的工作環境中,所以行星齒輪箱也是風機傳動鏈中最容易發生故障的部件。因此,通過對行星齒輪箱進行狀態監測,盡早地發現其故障,避免發生計劃外停機或嚴重的事故,對保證風電設備的安全運行具有重要意義[2]。
振動信號的分析方法一般可以分為時域、頻域和時頻域3類[3]。其中,時頻域分析是處理非穩態信號的有力工具。
CHEN Xiao-long等人[4]提出了一種迭代廣義時頻重分配方法,其將非平穩多分量信號分解為恒定頻率的單分量信號,采用該方法可以提高風電機組齒輪箱故障診斷中的時頻可讀性。孔子遷等人[5]利用卷積神經網絡和雙向門控循環單元,實現了時頻特征融合背景下的行星齒輪箱端到端故障診斷目標。孟玲霞等人[6]建立了一個時變轉速變載荷的風電機組齒輪箱振動信號模型,并在此基礎上提出了一種新的時頻脊階次譜故障特征提取方法。DHAMANDE L S等人[7]針對軸承齒輪復合故障,提出了一種基于離散小波變換和連續小波變換的時頻統計特征的故障診斷方法。
上述研究雖然能夠進行較高精度的故障診斷任務,但是缺少直觀的時頻域證據來支撐診斷結論。
時頻分割是分析時頻分布的重要手段之一。例如,YAN Bao-kang等人[8]提出了一種基于多分辨率時頻譜分割和振動信號稀疏分解的融合方法,該方法提高了最佳原子的計算速度和逼近精度。HUANG Chao-ming等人[9]采用時頻域幾何分布特征來分析經典的最大類間方差(OTSU)算法結果,并提出了一種評估摩擦副磨損程度的新方法。
上述研究雖然實現了對故障特征區域的分割目的,但是沒有提出全局性的診斷模型。
綜上所述,上述研究工作已經將深度學習應用于基于時頻分析的故障診斷研究中,但是這些研究者通常旨在開發一種不可拆分的智能系統,以此來完成基于時頻信息的行星齒輪箱故障診斷任務[10-13]。而時頻分析的過往研究尚缺乏對于最新的全卷機神經網絡的應用[14]。
因此,如果將時頻分析和基于時頻信息的故障診斷納入到一個連續但模塊化的診斷框架中(這與人工診斷過程更加相似),其就能為操作者提供更多、更全面的關于設備健康狀態的支撐信息,并且使得故障診斷結果更為可信。為此,筆者構建一種用于風電機組齒輪箱振動時頻分析和故障診斷的兩階段框架。
由于傳統基于閾值的方法在處理高分辨率時頻圖時容易受到噪聲干擾,因此,筆者在該框架中使用基于全卷積神經網絡的語義分割方法,即以逐個像素點的形式對時頻圖像進行標記。
筆者使用U-net算法,將時頻圖中屬于故障特征的像素點與背景區分開,然后使用形狀特征來提取分割得到的二值圖像中的有用信息;最后使用隨機森林算法對行星齒輪箱的健康狀態做出診斷。
1 基礎理論
1.1 U-net
U-net模型是由RONNEBERGER O等人[15]234在2015年首次提出的,其最初被應用于醫學圖像分割領域。
作為全卷積神經網絡的一種重要變體,U-net不包含全連接層,而是使用對稱布置的卷積層對特征信息進行壓縮和重構,從而在多尺度上利用上下文信息生成像素級的圖像分割結果。目前,U-net模型及其變體在醫學圖像分割領域應用最多,并且正在向機器視覺、基于圖像的故障診斷等領域拓展。
U-net的結構如圖1所示。
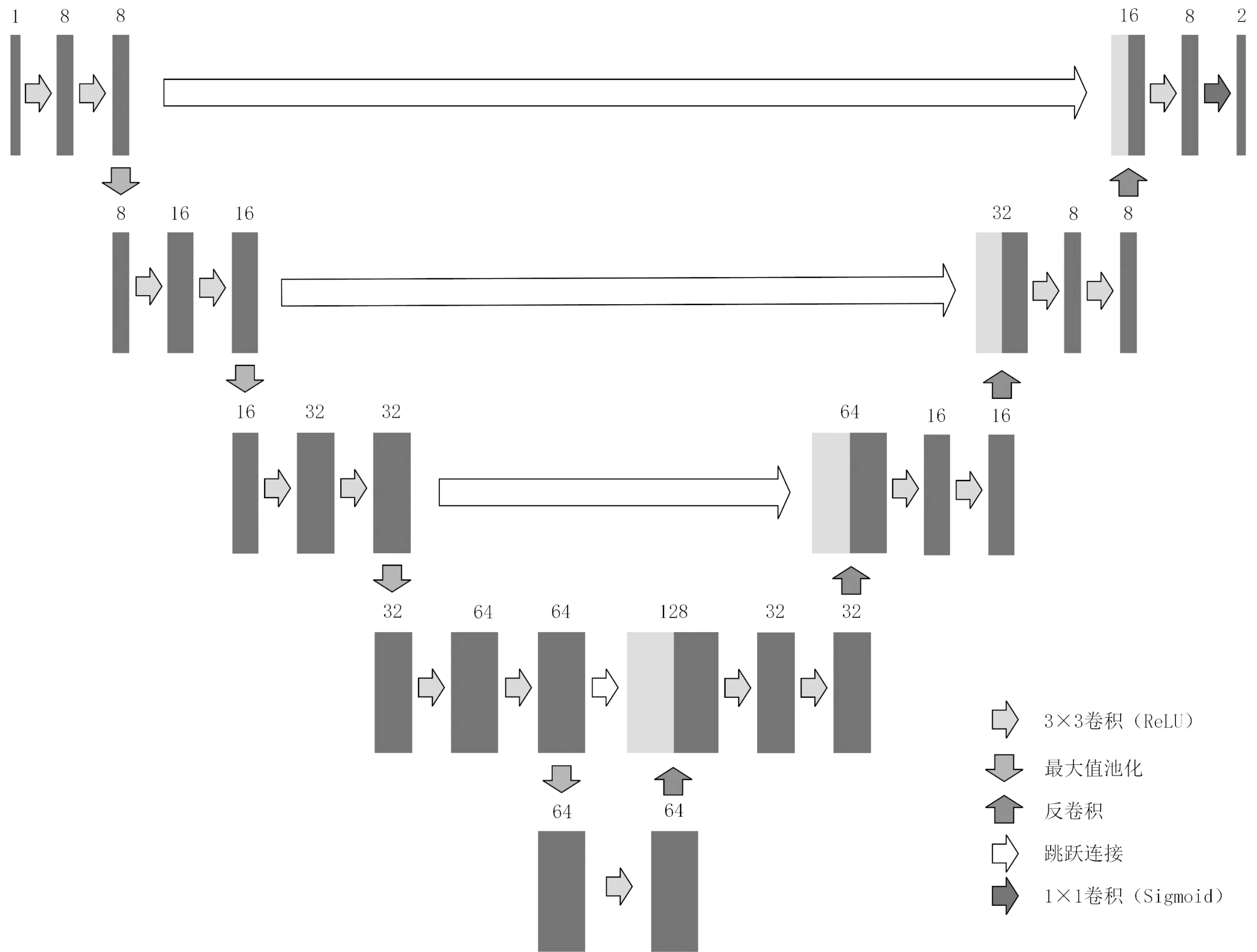
圖1 U-net的結構
U-net模型的左邊是壓縮路徑,也被稱為編碼路徑,它由多個重復出現的壓縮模塊組成。壓縮模塊具有卷積神經網絡的典型結構,包含3×3的卷積層、ReLU激活函數、批量歸一化層、2×2的池化層等。
U-net模型的右邊是擴張路徑,也被稱為解碼路徑。它的總體結構與壓縮路徑非常相似,同樣包含若干個重復出現的擴張模塊。相比于壓縮模塊,擴張模塊中使用反卷積運算代替了卷積運算,并增加了來自壓縮路徑的跳躍連接層。基于上述設計,U-net呈現出簡潔、優雅的U型結構。
為了更加細致地說明U-net模型,筆者將介紹其中的幾個關鍵構件:
1)卷積層。它由一組可以設置高、寬的卷積核組成。可學習的卷積核使得卷積層能夠對輸入中的特征信息進行概括,并映射到新的特征空間中。此外,共享權重的設置使得卷積層與全連接層相比具有更低的計算復雜度。對于每個卷積核,其輸出為:
(1)
式中:Xj為第j個輸入通道;Oi為特征映射的第i個通道;f為激活函數;ωij為權重;bi為偏置項;
2)反卷積(有時也被稱為轉置卷積)。在U-net模型中,它的作用是提高特征映射的分辨率。為了獲得與壓縮路徑相匹配的擴張能力,反卷積層采用2×2的反卷積核,并設置卷積步長為2;
3)激活函數。它賦予了卷積網絡建模非線性映射的能力。常見的激活函數包括Sigmoid函數、Tanh函數、ELU、ReLU等。作為一種非飽和激活函數,ReLU函數能夠緩解梯度消失和爆炸的問題,同時能夠加速模型學習。因此,ReLU被用作壓縮模塊和擴張模塊中的激活函數,其計算方法如下:
ReLU(x)=max(0,x)
(2)
4)批量歸一化層。它是解決批量訓練過程中的特征分布漂移問題的重要工具。嚴重的特征分布漂移會降低網絡訓練的穩定性,加劇過擬合現象發生,這在深度神經網絡中尤為明顯。批量歸一化處理則將每層神經元的輸出轉化為標準正態分布。對于一個批量訓練數據[x1,x2,…,xm],歸一化處理后的結果如下:
(3)
(4)
(5)
(6)

1.2 形狀特征
標記后的時頻圖結果可以被看作一種二值圖像,它具有和輸入圖像相同的分辨率。因此,對下一步的故障分類算法來說,其存在數據冗余的問題。所以,筆者使用基于區域的形狀特征方法來對數據進行特征提取。
幾何矩[16]是一種簡潔有效的基于區域的形狀特征提取方法。對于函數f(x,y),它的(p,g)階幾何矩表達式為:
(7)
圖形的一些重要區域屬性可以從幾何矩衍生出來:M00定義了一個圖形的質量;(M10/M00,M01/M00)定義了一個圖形的重心;(M20,M02)定義了一個圖形的慣性矩,它描述了圖形相對于坐標軸的質量分布。
上述性質對于表征標記后的時頻圖像中的特征區域分布情況十分有用。
1.3 隨機森林
隨機森林是一種基于集成學習思想的人工智能技術。針對傳統決策樹算法易發生過擬合的問題,LEO BREIMAN[17]開發了基于多個分類回歸樹(classific-ation and regression tree,CART)和裝袋算法(bootstrap aggregating,Bagging)的集成分類器,并將其成功運用到圖像分類領域。
在準備階段,筆者先將原始數據集按比例劃分為訓練集和測試集(其中,訓練集將用于后續決策樹的訓練,測試集將用于決策樹的性能驗證),然后使用Bagging方法,從訓練集中有放回地隨機抽取訓練樣本,并使用隨機選取的特征子集對決策樹進行訓練,這種設置為決策樹的構建增加了獨立性,能夠增強模型最終的抗噪聲性能和泛化能力。在訓練集中反復使用Bagging方法直到構建所需的所有決策樹。隨機森林算法的最終輸出由所有決策樹的結果統計得出。對于回歸問題,通常將不同決策樹預測值的平均值作為隨機森林的輸出。對于分類問題,基于決策樹的輸出采用多數投票的機制來確定最終輸出。
隨機森林算法主要步驟及流程如圖2所示。
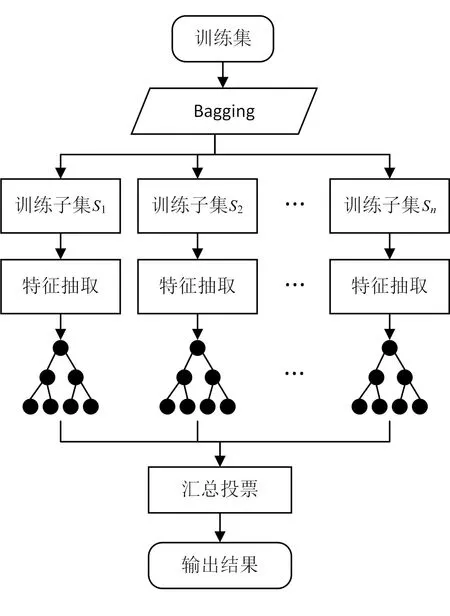
圖2 隨機森林算法流程圖
隨機森林算法的詳細過程如下:
1)構建訓練樣本集,設置決策樹個數、特征集大小等超參數;
2)對訓練樣本集進行隨機采樣,構建訓練子集;
3)隨機抽取特征;
4)基于CART算法,使用只含部分特征的訓練子集建立決策樹;
5)重復上述過程,直至得到完整森林;
6)將測試集代入訓練好的隨機森林;
7)將所有決策樹的輸出匯總投票,得到最終結果。
2 基于U-net和隨機森林的兩階段框架
2.1 兩階段框架的結構
筆者提出的兩階段框架旨在發展一種有普遍適用性的故障診斷框架,其從時頻數據中自動分析故障現象,并完成對風電齒輪箱的故障診斷任務。
為此,筆者提出了一種用于時頻分析和故障分類的兩階段框架:在第一階段,使用U-net對時頻圖中代表故障的特征區域進行標記,而后提取標記后的二值圖像中的形狀特征;在第二階段,筆者訓練隨機森林算法,對形狀特征進行分類,確定齒輪箱的健康狀態。
兩階段框架的整體結構如圖3所示。
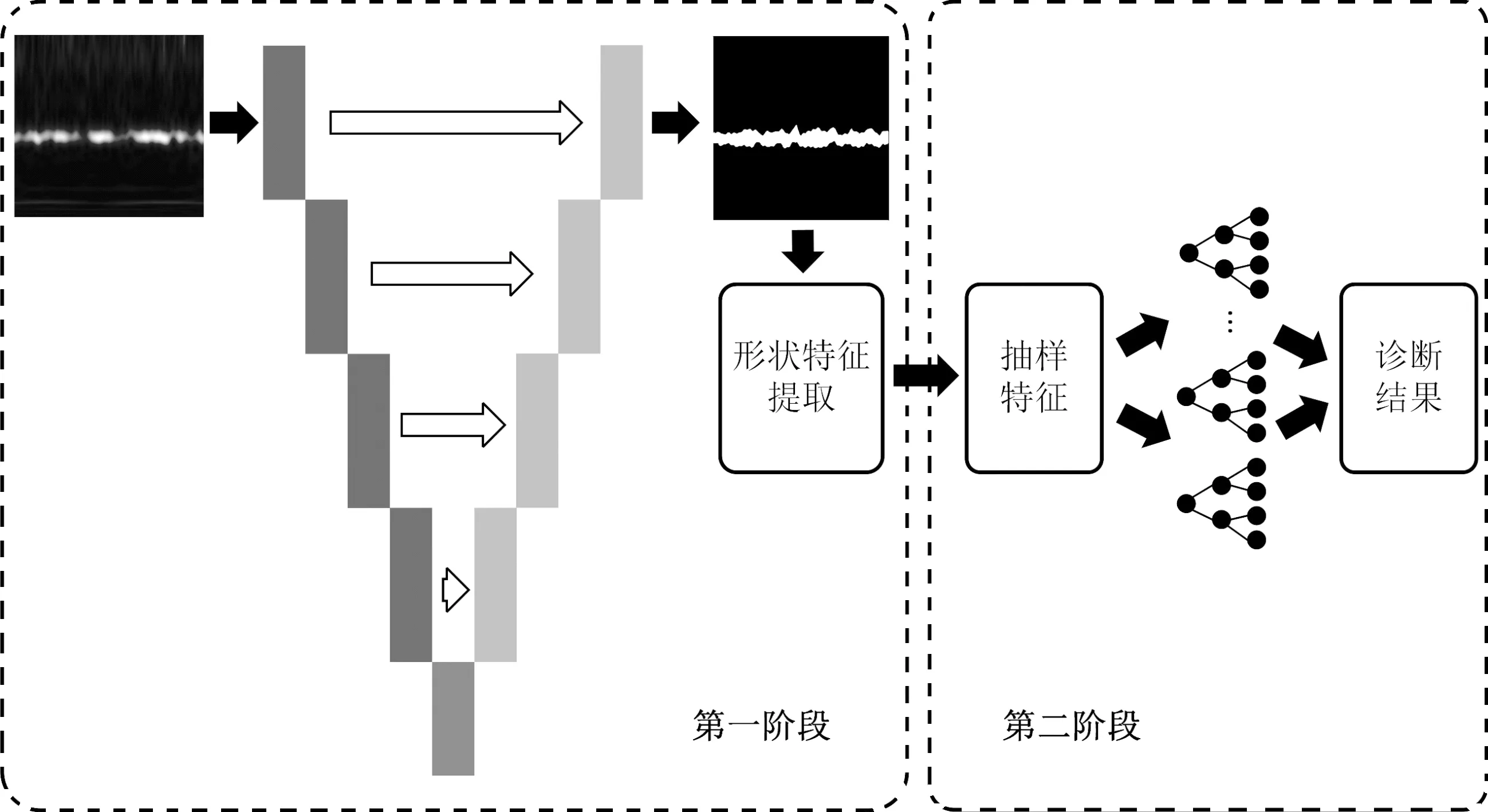
圖3 兩階段框架的結構
2.2 分析算法的評價指標
筆者使用3種評價指標來定量地評估不同算法標記時頻圖中特征區域的能力,包括精度(P)、召回率(R)和F1分數。
共同使用3種指標有利于從更全面的角度分析算法性能:召回率能夠反映算法避免遺漏有價值信息的能力;精度能夠反映算法精準選取有價值信息的能力;F1分數能夠反映算法在上述能力間的協調。3種指標的計算公式如下:
(8)
(9)
(10)
式中:TP為真陽性的像素點數;FP為假陽性的像素點數;FN為假陰性的像素點數。
3 實驗驗證
3.1 實驗數據及其預處理
實驗中使用的振動信號采集自華北地區某風電場的1.5 MW變槳控制風力發電機。
實驗中配備的行星齒輪箱如圖4所示。
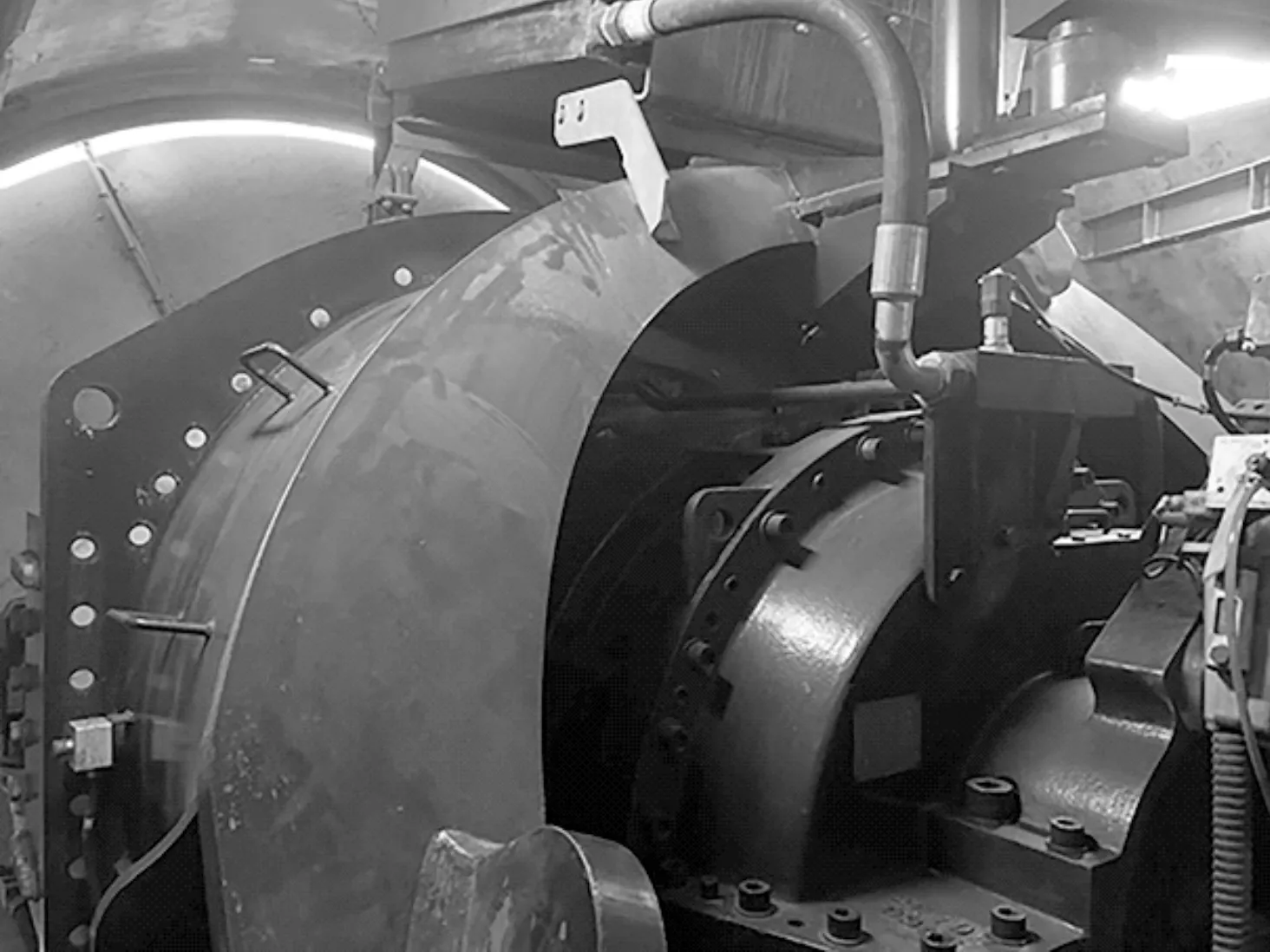
圖4 實驗中的行星齒輪箱
傳動鏈主要包括葉片轉子、速比為100.48∶1的行星齒輪箱和雙饋式異步發電機。行星齒輪箱包含兩級行星齒輪傳動和一個平行齒輪傳動。
筆者采集數據時,加速度傳感器以磁吸方式固定在第二個行星級的外齒圈處。
齒輪箱內部結構和測點位置如圖5所示。
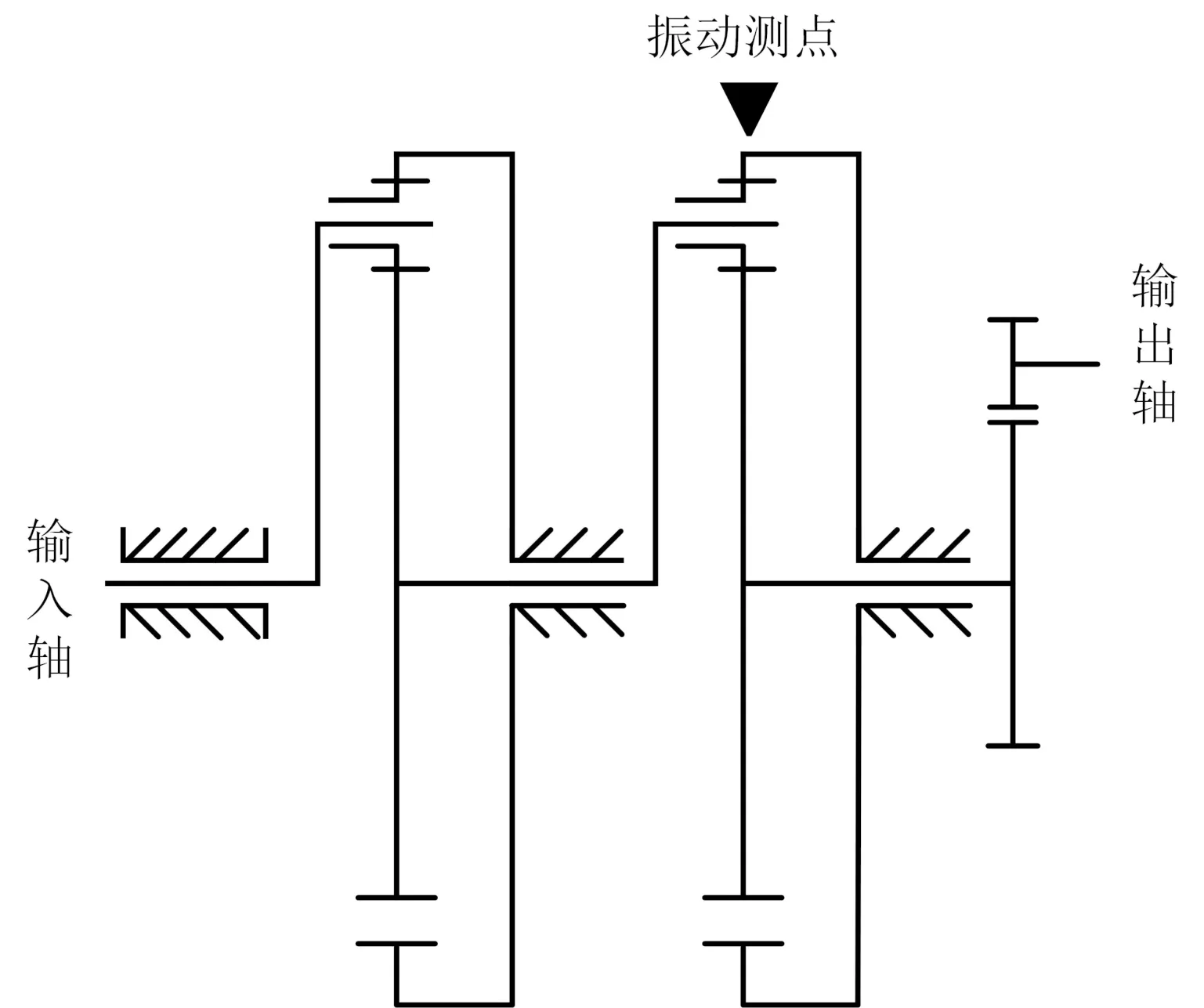
圖5 行星齒輪箱內部結構及測點位置示意圖
該實驗共有4種健康狀態,包括正常、齒圈齒面點蝕、行星輪嚙合不對中、點蝕-不對中并發。上述故障都發生在第2個行星級,每種健康狀態對應4臺行星齒輪箱,所以該實驗中共使用16臺齒輪箱的振動數據。
風力機變轉速運行的特點以及多變的環境因素,增加了齒輪箱分析和診斷的難度,使實驗任務更具挑戰性。
離線采集的采樣頻率設置為16 384 Hz,每個信號持續10 s,從每條信號中截取10個片段用于計算時頻圖。筆者使用歸一化S變換[18],從信號片段中計算生成大小為512×512的時頻圖像,將計算所用的歸一化因子設置為2。
4種健康狀態下的振動信號片段如圖6所示。
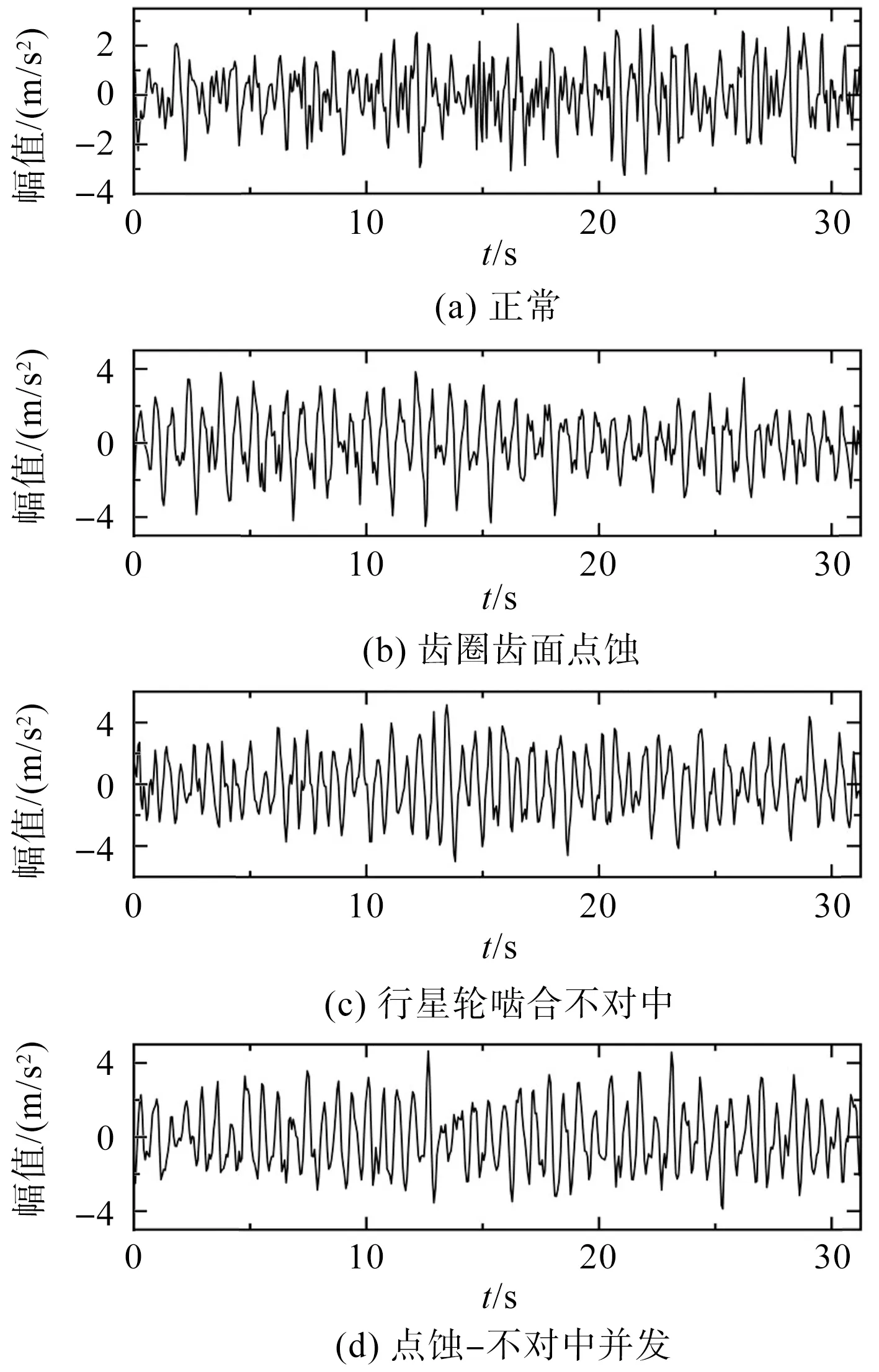
圖6 4種健康狀態下的振動信號片段
4種健康狀態下的時頻圖像如圖7所示。
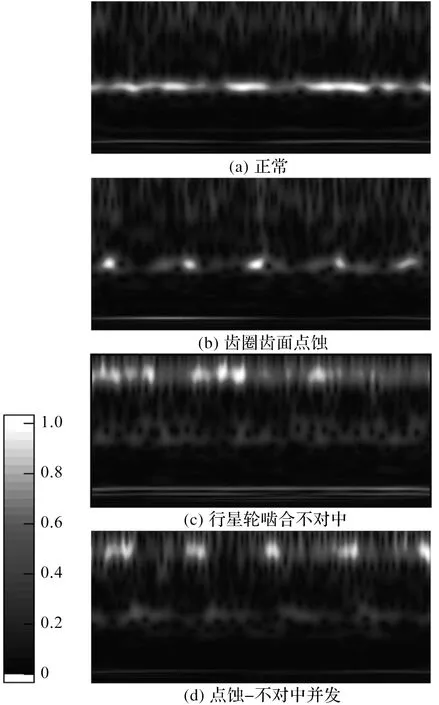
圖7 4種健康狀態下的時頻圖
圖7(a)、圖7(c)分別在行星齒輪一倍、二倍嚙合頻率處顯示出連續存在的帶狀特征區域;而圖7(b)、圖7(d)分別在行星齒輪一倍、二倍嚙合頻率處顯示出近似相等時間間隔的斑塊狀特征區域。
通常情況下,使用過小的數據集容易造成深度學習算法發生過擬合問題。鑒于此,筆者使用基于Python語言的Augmentor工具包[19]對原始圖像進行鏡像或扭曲,從而將總樣本數擴增了5倍,達到960個,基本上能夠滿足算法對數據總量的要求。
3.2 實驗設置
實驗中所用的U-net結構主要參考RONNEBERGER O等人[15]235-237的論文,并做了一些改動,以適應行星齒輪箱時頻故障診斷任務。筆者使用Adam作為優化算法,使用交叉熵代價函數,將學習率設置為1×10-3,小批量訓練的樣本數設置為24,以加快訓練速度。優化的最大迭代次數為50次,當算法在驗證數據集上的代價經過連續5次迭代都不下降或沒有明顯改善時,模型即停止訓練。
筆者在一臺配置酷睿i5-10400處理器和英偉達GeForce GTX1660顯卡的計算機上對所有實驗進行操作。筆者使用的計算機為64位Windows10操作系統,其使用基于Python3.8的PyTorch深度學習框架。此外,筆者還使用了NumPy科學計算庫以及PIL等圖像處理庫。
3.3 實驗結果與分析
在語義分割方法中,圖像中每個像素點都分配了一個標簽。在該節中,時頻圖中的特征區域以灰度255突出顯示,其他部分的灰度則被設置為0。實驗數據按4:1比例被分割為不重疊的兩個部分,分別作為訓練集和測試集使用。
U-net模型對測試集中部分數據的分析結果如圖8所示。
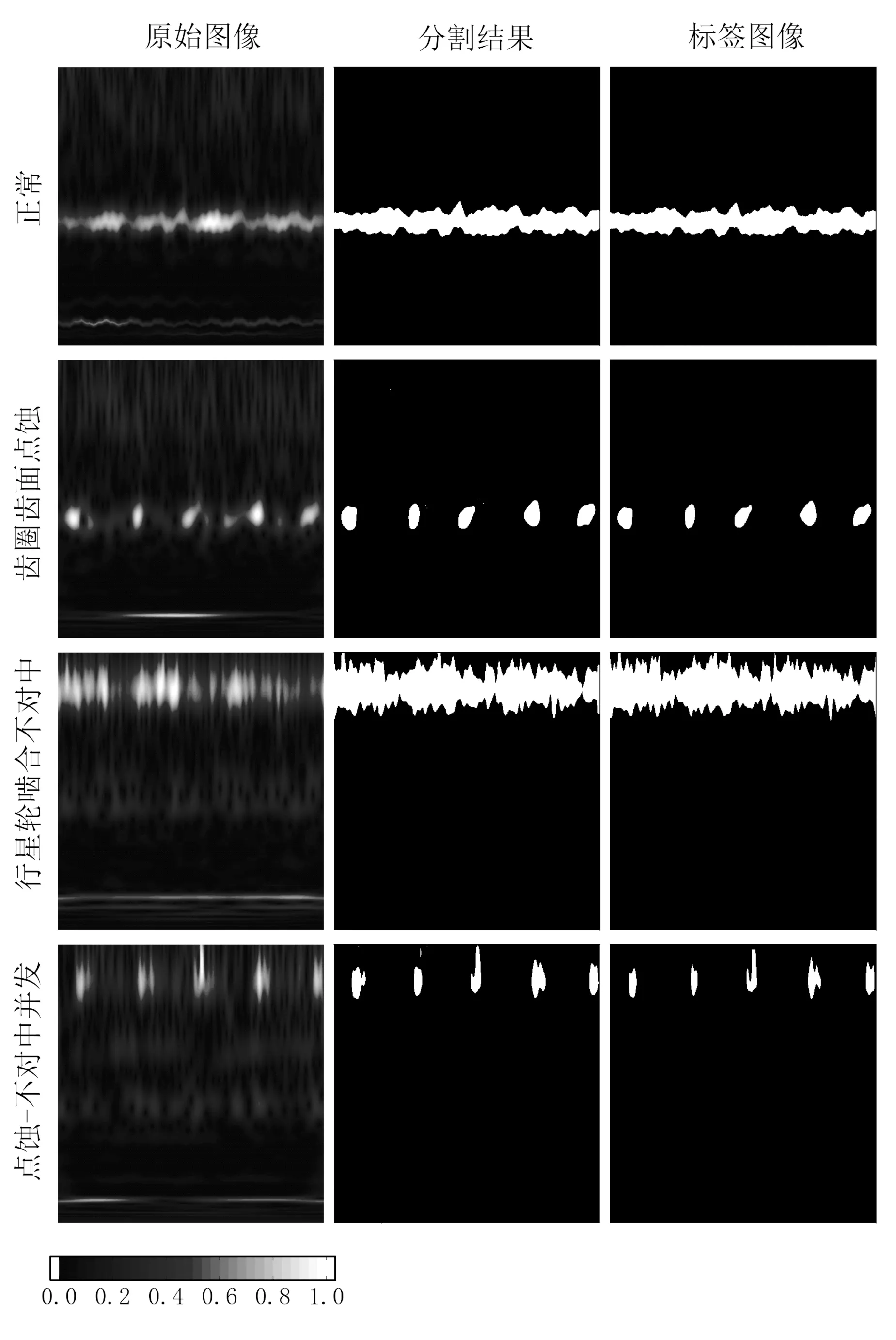
圖8 U-net對4種健康狀態下時頻譜的分析結果
從圖8中可以看到:總體而言,對于4種健康狀態的樣本,U-net都能準確地標記出故障特征區域,揭示時頻圖中包含的嚙合或沖擊現象。另一方面,齒面點蝕故障和點蝕-不對中并發故障是處理效果相對較差的2種故障,網絡輸出中有少量的噪點和錯誤邊界。這是因為斑塊狀特征區域容易與強背景噪聲相混淆。
為了更具體地展示U-net的分析性能和不同類型樣本分析結果間的差異性,實驗中詳細的性能指標如表1所示。
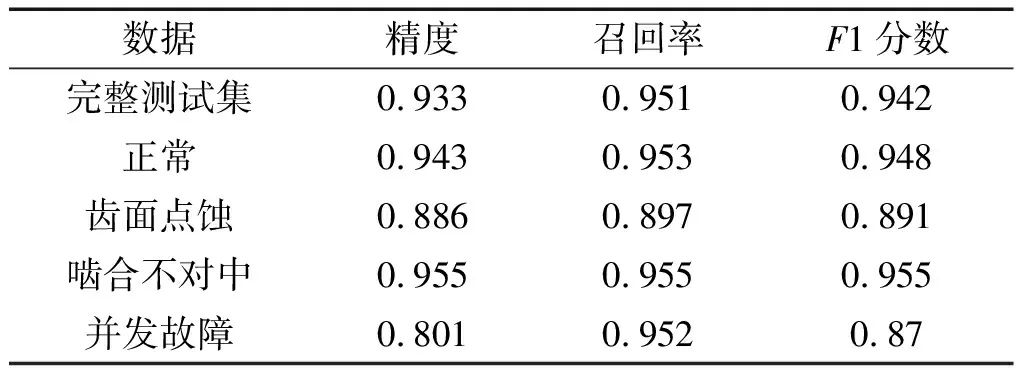
表1 U-net方法的性能指標
從表1中可以發現:U-net方法的精度、召回率、F1分數3項指標都是令人滿意的。其中,F1分數達到了94.2%。齒面點蝕故障和點蝕-不對中并發2種故障的分析結果相對稍差,這與圖8中顯示的現象一致。
為了進一步驗證U-net模型的性能,在使用相同數據集的情況下,筆者將其與OTSU方法和傅立葉濾波2種分析方法進行了對比,實驗結果如圖9所示。
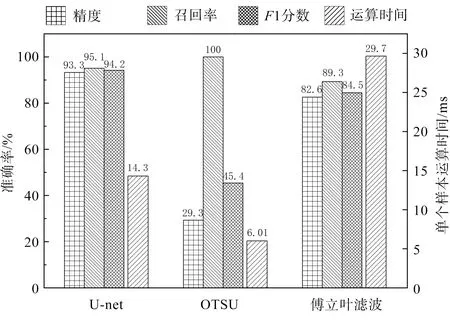
圖9 不同算法的性能和時間消耗比較
圖9中還給出了算法處理每個樣本所消耗的時間。
由圖9可知:得益于其強大的學習能力和上下文信息處理能力,U-net展現出比其他2種對比方法更優秀的綜合性能;OTSU方法雖然給出了最高的計算效率,但是它的精度和召回率之間明顯失調,即分割結果中包含過多的假陽性像素點;傅立葉濾波方法表現出比OTSU方法更好的性能,F1分數達到了84.5%,但是因為在圖像處理過程中需要優化濾波器中掩膜的尺寸,所以其在計算效率方面表現不佳;U-net作為一種深度學習方法,其能夠通過跳躍連接自動捕捉多尺度區域信息,無需手動調整模型參數,同時,也能夠快速處理數據樣本,滿足實際工程應用中的實時性要求。
綜上所述,在筆者提出的兩階段框架中,U-net能夠勝任風電齒輪箱時頻分析任務。
筆者開發這種高精度的時頻分析方法的最終目的是為了對風電機組齒輪箱故障進行快速分類。
為了消除二值時頻圖中的冗余信息,筆者使用3個形狀特征來提取標記后圖像中的有價值特征。3個形狀特征分別為:圖像質量M00和兩個方向的慣性矩M20、M02。其中,前者用于區分特征斑塊與特征條帶,后兩者則對其相對位置做出判斷。經過區域形狀特征提取后,診斷階段的輸入信息總量從二維512×512=262 144壓縮為一維1×3=3,實現了極大幅度的壓縮目的。
被大幅壓縮的特征空間使得使用簡單的分類器成為可能。在兩階段框架中,筆者選擇了隨機森林算法來對4種齒輪箱健康狀態進行快速分類。
隨機森林算法在測試數據集上的分類混淆矩陣如圖10所示。
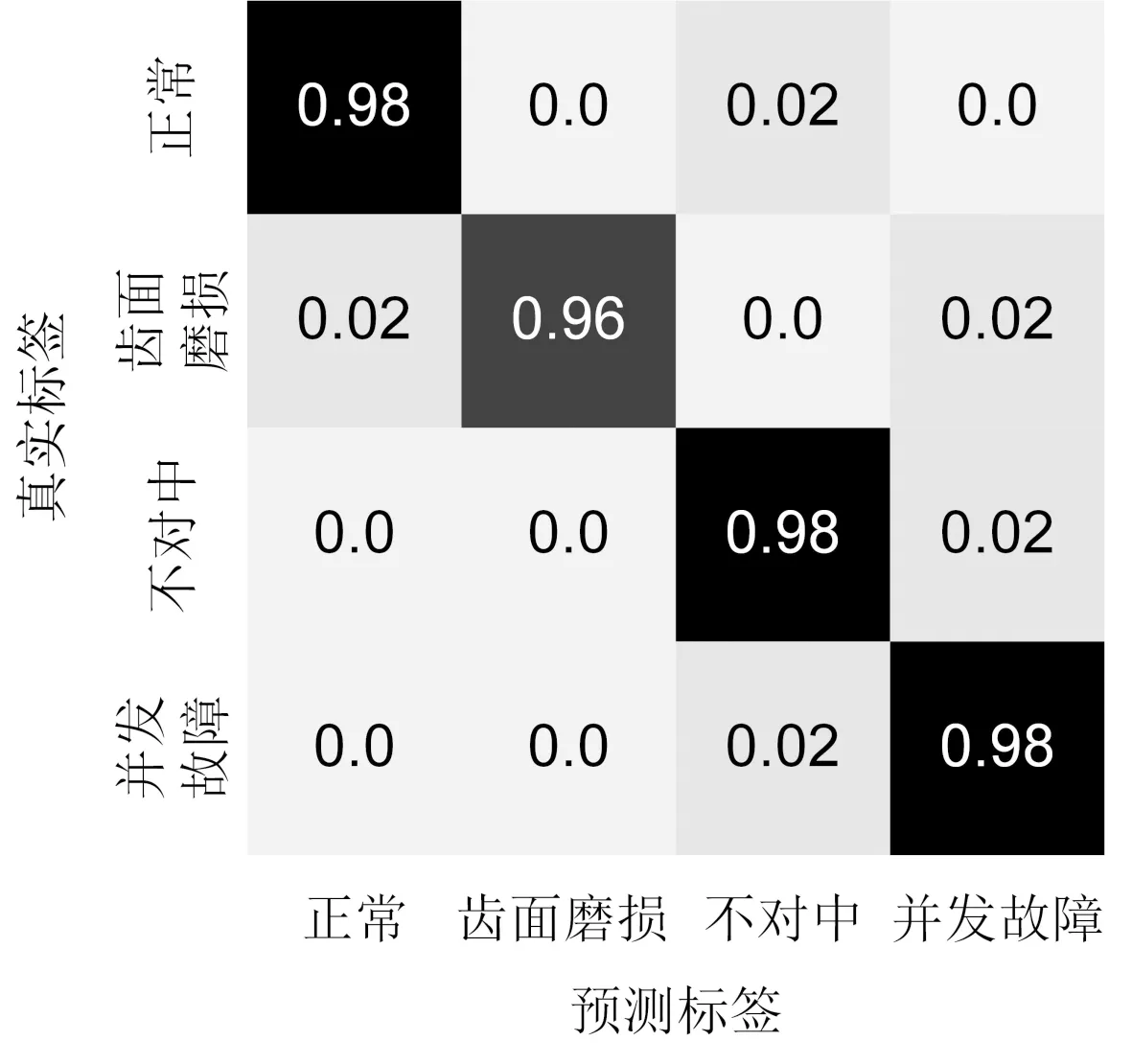
圖10 故障分類混淆矩陣
由圖10可知:總體而言,診斷的平均精度達到了97.4%,有限的數據量和壓縮后的特征空間都沒有對診斷結果產生不利影響;具體而言,行星輪嚙合不對中故障和點蝕-不對中并發故障是容易相互混淆的兩類故障,因為它們都具有二倍嚙合頻帶能量偏高的特征;齒面點蝕故障是診斷精度最低的一類故障,根據上一小節中的觀察,這是因為它更容易受到噪聲污染。
綜上所述,形狀特征提取搭配隨機森林算法能夠有效地提取時頻圖像中的故障特征,并對風電機組齒輪箱的健康狀態做出準確分類。
4 結束語
采用時頻分析方法對風力發電機齒輪箱進行分析時,存在智能化程度低、故障診斷結論缺乏多域支撐、時頻分析與故障診斷有功能鴻溝等問題,為此,筆者提出了一種用于風電齒輪箱振動時頻分析和故障分類的兩階段框架,包含作為第一階段的深度神經網絡時頻譜分析方法,和作為第二階段的隨機森林故障分類方法。
研究結論如下:
1)基于U-net模型的風電機組齒輪箱時頻分析方法能夠精準地標記振動時頻圖中的故障特征區域,解決了傳統方法受背景噪聲影響大、計算效率低、需要設置經驗參數等問題。U-net模型通過對時頻數據進行了對稱壓縮和擴張,捕捉了圖像中的空間關聯信息,實現了對故障特征斑塊或條帶的精準分割目的;
2)針對分析后的時頻圖像中存在數據冗余的問題,筆者采用形狀特征法對二值圖像中的形狀信息和位置信息進行了提取,大幅度壓縮了數據總量,減輕了第二階段故障診斷系統的計算壓力,同時為故障診斷結論提供了額外的支撐信息;
3)使用在役風力發電機行星齒輪箱振動數據對兩階段框架進行了實驗驗證,結果發現該兩階段框架達到了97.4%的平均診斷精度和0.942的時頻分析F1分數。通過對比其他2種方法,證明了該兩階段框架的先進性,對實際工程中的風電機組齒輪箱時頻分析和故障診斷具有一定的參考價值。
在后續的研究中,筆者將繼續研究新型全卷積神經網絡在時頻分析領域的應用,并探索此類框架端到端的模型構建。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31