基于改進最小二乘法的水輪發電機氣隙數據分析
2023-08-31 06:48:12郭道芬
水科學與工程技術 2023年4期
林 濱,郭道芬
(福建棉花灘水電開發有限公司,福建 龍巖 364000)
水輪發電機氣隙測量是水電機組安裝與檢修中的重要工序之一,也是發電機組運行監控和故障診斷的重要組成參數。不論是安裝檢修中的氣隙靜態測量,還是機組運行中的動態監測,氣隙的均勻性與氣隙的變化不僅能夠反映出發電機的安裝質量,同時也為水輪發電機組異常振動及故障診斷分析提供必要數據支撐[1,2]。由于氣隙測量的重要性,在氣隙測量工具、測量方法等方面研究較多。譬如,吉有鵬[3]針對發電機檢修時氣隙測量要求,基于兩個對頭楔移動原則,設計了凸鴿尾對頭楔、凹鴿尾對頭楔等氣隙測量工具,實現了常規氣隙與較小氣隙的測量。楊光勇等[4]利用氣隙特征值計算模型對水輪發電機低頻振動問題進行分析,準確判斷出該問題是由氣隙不均勻導致的。萬書亭等[5]基于電磁轉矩特征值變化分析,建立氣隙靜偏心等故障識別方法,并利用實驗數據進行驗證。蘇鑫等[6]在分析傳統氣隙測量方法不足的基礎上,提出利用傳感器進行發電機氣隙的實時監控新方法,并對運行過程中由于定子、轉子溫度升高所造成的氣隙變化情況進行分析。
當前發電機氣隙測量相關研究或注重于傳感器測量,或傾向于利用氣隙平均值等特征值分析相關發電機故障。由于發電機氣隙理論上為一個圓,實際中受安裝精度、定子/轉子溫升導致的變形等影響,其氣隙常偏離安裝中心,因此采用較合理的擬合算法對實測數據進行分析,是進行氣隙狀態正確判斷的基礎。為此,本文針對某電站實際運行情況,擬采用最小二乘法分析氣隙變化及氣隙圓情況,獲得相應不圓度、偏心角和偏心距,進而判斷最大位移磁極號和最小位移磁極號,為氣隙分析和故障診斷奠定基礎。
1 氣隙測量及其分析方法
1.1 常規氣隙測量方法
氣隙測量是水輪發電機組維修中的重要工序之一。傳統的測量方法主要利用楔形板插入氣隙中,直到不能再移動時,取出楔形板,利用游標卡尺等測量楔形板上輕微壓痕處寬度,即可獲得氣隙數據。現在也有在該方法基礎上進行改進,在活動的楔形板上可顯示的直尺刻度,利用活動楔形板插入深度的不同,帶動指針在直尺上顯示位移。而在發電機運行中,氣隙測量則采用傳感器測量方式。隨著檢修自動化水平的提升,本文提出一種利用傳感器測量氣隙的方法,如圖1,將傳感器安裝后,推動轉子移動,逐個測量各磁極對應氣隙并保存數據,該方法測量精度高,后續不圓度等計算方法集成于軟件中,也提高實測數據的擬合與分析精度。
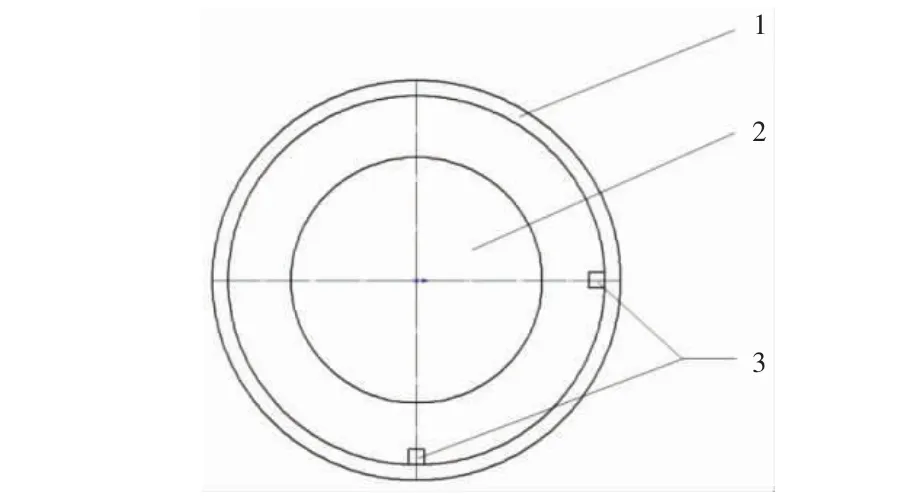
圖1 傳感器測量發電機氣隙的示意圖
1.2 采用最小二乘法優化氣隙測量擬合計算
1.2.1 簡化擬合圓方法
檢修過程或運行過程中的氣隙實測數據,必須進行數據處理,一方面因為實測過程中往往存在干擾因素,另一方面也是因為轉子、定子理論上為圓形,通過氣隙數據擬合成圓,進而計算不圓度、偏心角、偏心距更能反映轉子、定子的實際情況[7]。目前,常用的氣隙擬合圓算法是簡化的最小二乘擬合圓方法,其圓心坐標(x,y)按式(1)計算:
式中n 為發電機磁極數;xi,yi為依據實測的氣隙值ri按照磁極在圓面部分的角度進行折算所得。
簡化最小二乘擬合圓的半徑按式(2)計算:
1.2.2 最小二乘擬合圓方法
本文基于最小二乘法原理基本思路,對上述方法進行改進,建立新的氣隙擬合計算方法,假定最小二乘圓心為(x,y),半徑為R,則按照最小二乘擬合原理,各磁極測量氣隙數據與擬合圓心之間的距離之和的均值與理想半徑Rz之差最小,即相關關系符合式(3):
本文利用迭代法,通過C# 編程計算獲得最小二乘法下的擬合圓圓心和半徑。
1.2.3 圓度評價方法
對擬合數據常通過不圓度、偏心距和偏心角進行評價,相應計算方法如下:
不圓度:
偏心距:
偏心角:
式中Rzi代表不同擬合算法下,各磁極方位所對應的半徑值(含偏心矩和偏心角效應)。
2 優化氣隙測量算法應用實例分析
2.1 實例背景
福建某電站總裝機80 MW,單機容量40 MW,發電機額定轉速214.3 r/min,磁極數28 個,發電機氣隙設計15 mm,檢修時常采用傳統模式進行氣隙測量。目前,正進行技術改造,采用傳感器定點測量的方式,獲得不同磁極所對應的氣隙數據,進行分析其氣隙分布調整,為發電機安裝調整和狀態分析奠定基礎。
2.2 實例分析
圖2 代表的是該電站水輪發電機28 個磁極實測的氣隙數據,其中最大氣隙是15.35 mm,出現在第2 號磁極上;最小氣隙是14.11 mm,出現在第18 號磁極上。由于在轉動過程中實測數據難以避免會存在一定誤差,呈圓效果差,為避免此類誤差,需要采用擬合算法對其進行相應分析,其結果如圖3、表1和表2。

表1 氣隙測量不圓度擬合對比
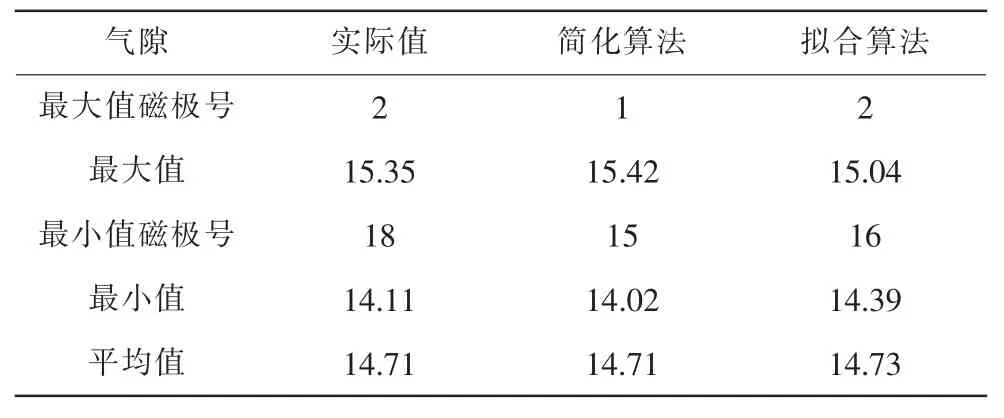
表2 氣隙測量特征值對比
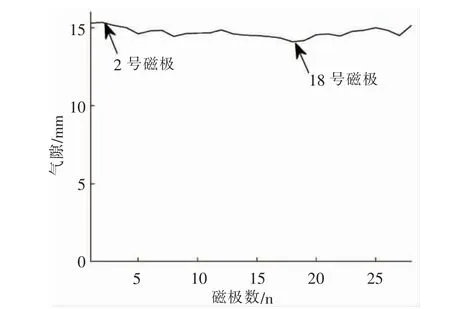
圖2 各磁極實測數據
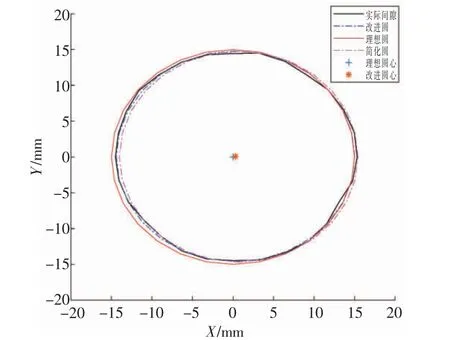
圖3 氣隙擬合分析
表1、表2 表明,采用簡化最小二乘法,氣隙不圓度1.49 ,偏心角3.62°,偏心距0.70 mm,最大氣隙15.42 mm,出現在第1 號磁極;最小氣隙14.02 mm,出現在第15 號磁極。而采用改進最小二乘法,氣隙不圓度0.79 ,偏心角15.72°,偏心距0.33 mm,最大氣隙值為15.04 mm,出現在第2 號磁極,最小氣隙值為14.39 mm,出現在第16 號磁極。
兩種方法對比可知,簡化最新二乘法所得的不圓度要比改進最小二乘法所獲得的值更大,呈圓效果更差。從最大氣隙值來看,簡化最小二乘法所得的值偏大,且磁極位于1 號(與其偏心角更接近0°有關),與實測的2 號略有偏差,而改進最小二乘法所得結果不僅更遠,且更接近實測數據。最小氣隙值對比也反映了類似問題。機組檢修中開展氣隙測量,特別是修后測量發生在轉子測圓結束后,此時轉子圓度相對較好,該方法反映轉子偏移問題。
3 結語
本文針對水輪發電機檢修過程中的氣隙測量,提出一種利用傳感器在線測量的方法,并基于最小二乘法進行氣隙擬合計算。實例分析表明,在有效排除測量誤差的基礎上,最小二乘法所獲得的最大氣隙磁極號、最小氣隙磁極號更接近與實際測量值,更能反映實際氣隙變化情況,而簡化算法誤差相對較大。該研究不僅提高檢修過程中氣隙測量與數據分析精度及檢修效率,也為機組狀態監測和故障分析提供了新的方法。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
大電機技術(2017年3期)2017-06-05 09:36:02
山東工業技術(2016年15期)2016-12-01 05:31:22
軍事文摘(2016年16期)2016-09-13 06:15:49
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電力工程技術(2014年1期)2014-03-20 14:19:06
