旋轉輥差異化非直流道設計與多目標優化方法
2023-09-01 07:32:16李鋮姜海蛟李永康
中南大學學報(自然科學版) 2023年7期
關鍵詞:優化
李鋮,姜海蛟,李永康,2
(1. 太原理工大學 機械與運載工程學院,山西 太原,030024;2. 太原經濟技術開發區 博士后科研工作站,山西 太原,030032)
非晶薄帶具有優良的物理和電磁性能,被廣泛應用于航空航天、變壓器與傳感器等領域[1],目前主要采用平面流鑄法制備非晶薄帶。冷卻輥作為平面流鑄的關鍵設備,其換熱特性與效率直接影響非晶薄帶的質量,特別是隨著非晶薄帶制備寬度的增大,對其換熱效率提出更高要求。冷卻輥高速旋轉,流道內水流受力與流動特性較復雜,而流道結構決定了輥內冷卻水流動特性與更新速率,設計具有高換熱效率的冷卻輥流道結構,對提高非晶薄帶的橫向厚度均勻度、改善帶體脆化與系統節能具有重要意義[2]。
眾多學者對旋轉輥內流道的流動特性進行了研究。SONG 等[3]設計了3 種采用直肋道的旋轉冷卻輥流道,使用CFX 數值模擬獲得了流道內壓力與流線分布情況;郭茜等[4]為降低冷卻輥表面溫度,采用有限元法對冷卻輥進行數值模擬,得到了輥外徑、輥速、輥厚與溫度之間的關系。為進行結構優化,BEIGZADEH 等[5]結合數值模擬與神經網絡技術得到了間斷板翅的最優參數。針對多變量、多參數優化問題,GUERRINI 等[6]采用Plackett-Burman試驗對木材削片過程中的影響變量進行了篩選,簡化了設計過程。現有研究主要針對散射狀直肋道,且僅限于采用數值模擬方法對其流動特性開展研究,尚未從流道內流體微團力學分析角度出發,探究流道型線與旋向的關系對流動特性的影響,無法為肋道型線設計與優化提供理論支撐。另外,由于進、出水面的水流方向不同,若采用統一的徑向直流道,則水流方向會直接影響其流動特性,因此,有必要開展結構差異化設計,從結構角度出發對流道進行研究。
為提高冷卻輥流道內水流的更新速率,在流道內流體微團力學分析基礎上,提出一種進、出水面差異化的非直流道結構;針對使用流體動力學方法進行多變量、多參數優化時效率低的問題,在提出流道綜合性能指標的前提下,采用BP神經網絡預測與遺傳算法優化相結合的多目標優化方法對冷卻輥進、出水面的肋道進行優化,以期獲得最優的流道構型。
1 冷卻輥流道結構與改進方法
1.1 傳統散射狀直流道結構
目前,廣泛應用于平面流鑄的冷卻輥散射狀直流道結構如圖1所示。冷卻輥內芯兩側分別有若干由肋道與側板形成的封閉進、出水面流道。冷卻水由進水口進入空心主軸,經進水面流道進入環形換熱通道與輥套換熱,再經出水面流道從主軸出水口排出。冷卻輥換熱效率取決于換熱通道內水流更新速率,而在外界條件一定的前提下,流道結構決定了水流更新速率。然而,隨著冷卻輥高速旋轉,現有直流道存在沖擊、渦旋等現象,不僅造成能量損失,也極大影響了冷卻輥換熱效率[7]。
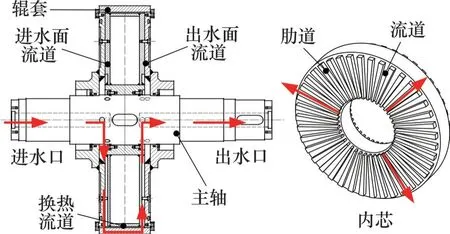
圖1 冷卻輥散射狀直流道結構Fig. 1 Structure of scattering straight channel of cooling roller
1.2 流道內流體微團力學分析與改進方法
從流道內流體微團的力學分析角度出發,可在理論層面為流道結構優化提供依據。以如圖2所示的進水面流道為例,設冷卻輥以角速度ω逆時針旋轉,當肋道的旋向與冷卻輥轉向相反時,質量為dm的流體微團在流道內以相對速度w沿著流線方向作相對運動。對流道微團進行力學分析可得沿法線t方向的平衡方程為
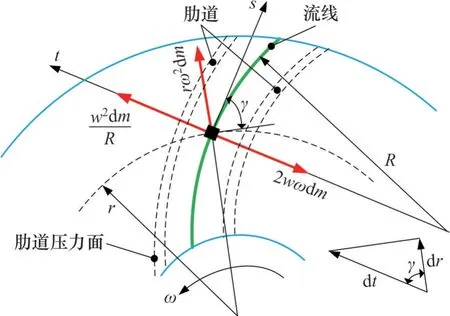
圖2 進水面流道流體微團力學分析Fig. 2 Force analysis of fluid micelles in the inlet surface flow channel
式中:?p/?t為法線t方向的壓力梯度,Pa;ρ為流體密度,kg/m3;γ為相對速度w與圓周速度u反方向的夾角;r與R分別為微團所在流道半徑與流線曲率半徑,m;w2dm/R與rω2dm分別為微團沿著流線運動時產生的離心力與微團隨進水面流道作旋轉運動產生的離心力,N;2wωdm為哥式力,方向指向曲率中心,N。
流體微團在法線t方向滿足如下偏微分方程:
由于流體微團的圓周速度u=rω,由t方向微元dt與半徑r方向微元dr的關系可知dt=dr/cosγ,代入式(2)可得
對比式(1)可得流體微團相對運動在法線方向的速度梯度?w/?t=2ω-w/R。同理,當肋道旋向與冷卻輥轉向相同時,?w/?t=-(2ω+w/R);當肋道為徑向時,?w/?t=2ω。
流道內相對速度梯度絕對值越大,軸向渦旋越嚴重[8]。為改善現有流道渦旋現象,進水面應選擇旋向與冷卻輥轉向相反的肋道,如圖3(a)所示;出水面則選擇旋向與冷卻輥轉向相同的肋道,如圖3(b)所示。
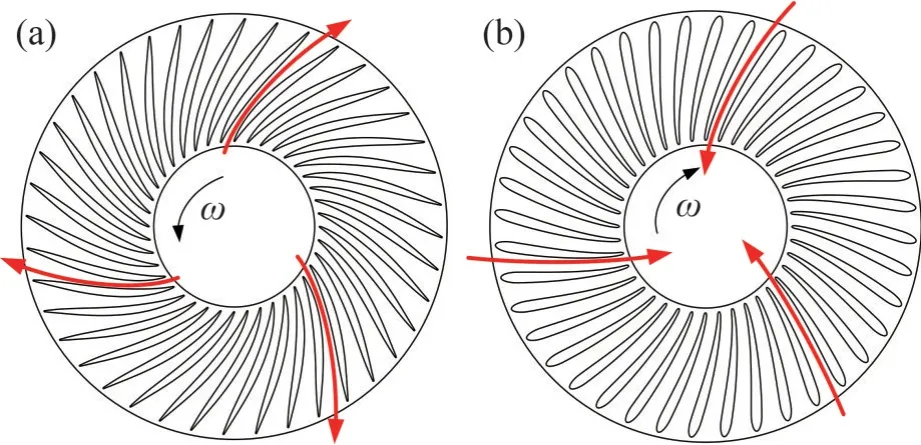
圖3 新型差異化非直流道Fig. 3 New differential non-straight channel
2 非直流道參數化建模與分析
2.1 基于Bezier曲線的參數化建模
圖4所示為非直肋道的部分設計參數,具體含義如下:α為肋道進口安放角;β為肋道出口安放角;δ為肋道包角;l為肋道外側寬度。
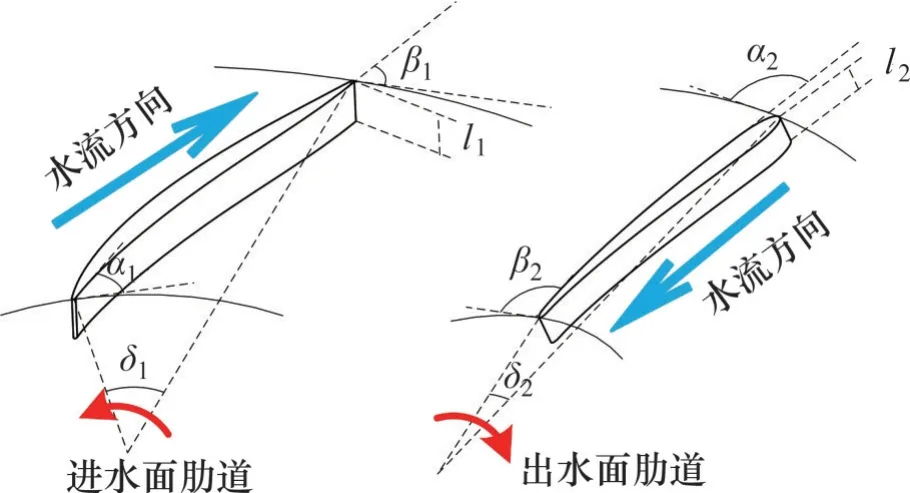
圖4 肋道具體參數Fig. 4 Specific parameters of the rib
參數化模型的建立可極大提高后期優化效率,為此對肋道厚度進行參數化表達。Bezier曲線具有優異的凸包性和全局性,被廣泛應用于現代曲線設計[9]。采用Bezier曲線實現肋道的加厚,其方法是通過k+1個控制點來決定k階Bezier曲線的形狀。本文采用4 階Bezier 曲線來對肋道的厚度進行控制。圖5(a)中,x1、x2、x3分別為進水面肋道加厚的可變控制點1、2、3 對應的肋道厚度;圖5(b)中,y1、y2、y3為出水面肋道加厚的可變控制點1、2、3對應的肋道厚度。
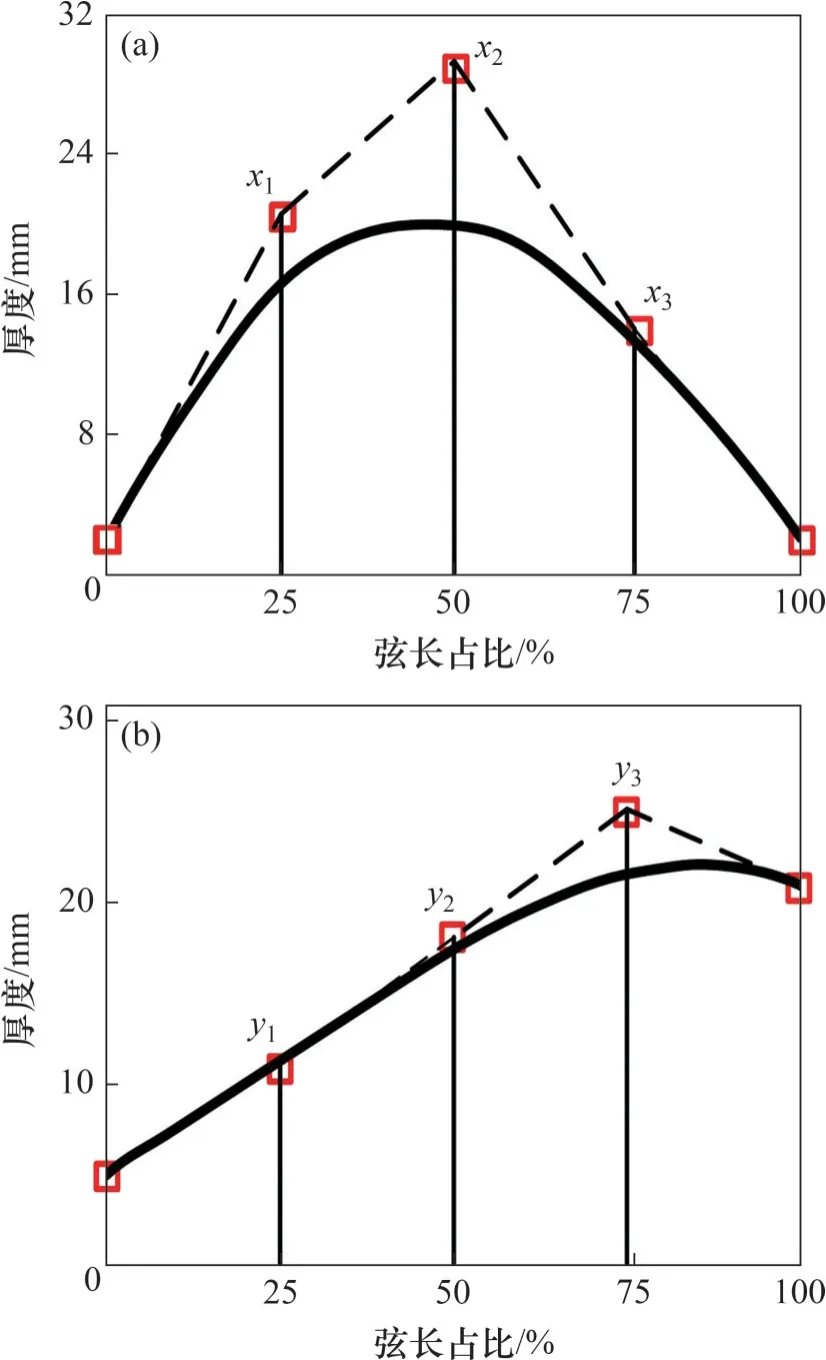
圖5 肋道參數化加厚Fig. 5 Parametric thickening of rib
2.2 初始參數的確定
通過理論分析獲得冷卻輥肋道進口安放角、出口安放角、包角與寬度等初始設計參數,如表1所示。采用交互式葉輪設計軟件Blade Gen對冷卻輥肋道進行建模[10]。
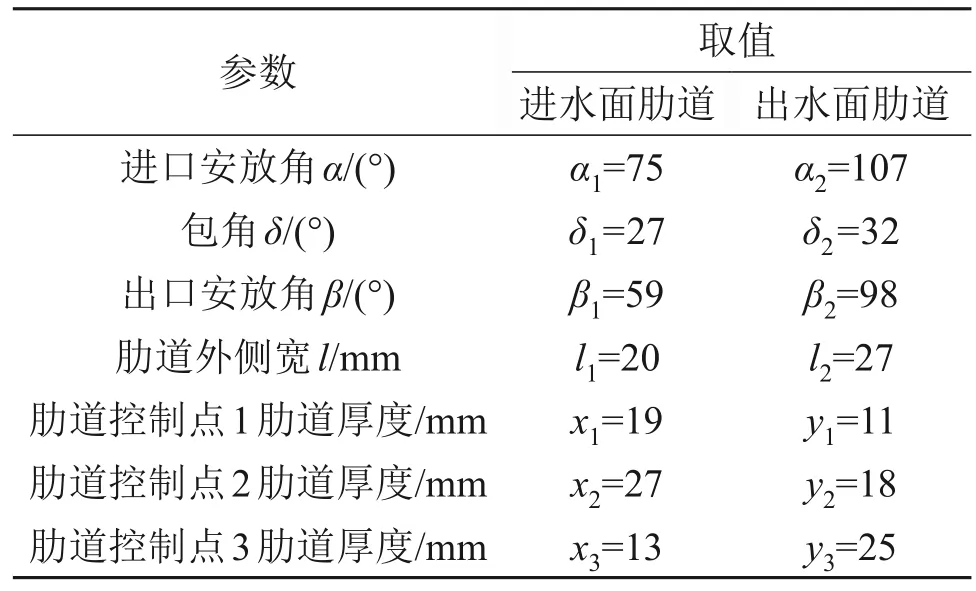
表1 冷卻輥結構幾何參數Table 1 The geometrical parameters of the cooling roller structure
2.3 流動特性求解過程
針對結構較為簡單的圓環狀換熱通道,采用傳統Mesh軟件劃分六面體網格。進出水面流道較復雜,為提高求解精度,采用Turbo Grid專業化軟件進行高質量結構化網格劃分,該軟件可自動加密流道邊界區域[11],劃分結果如圖6所示。
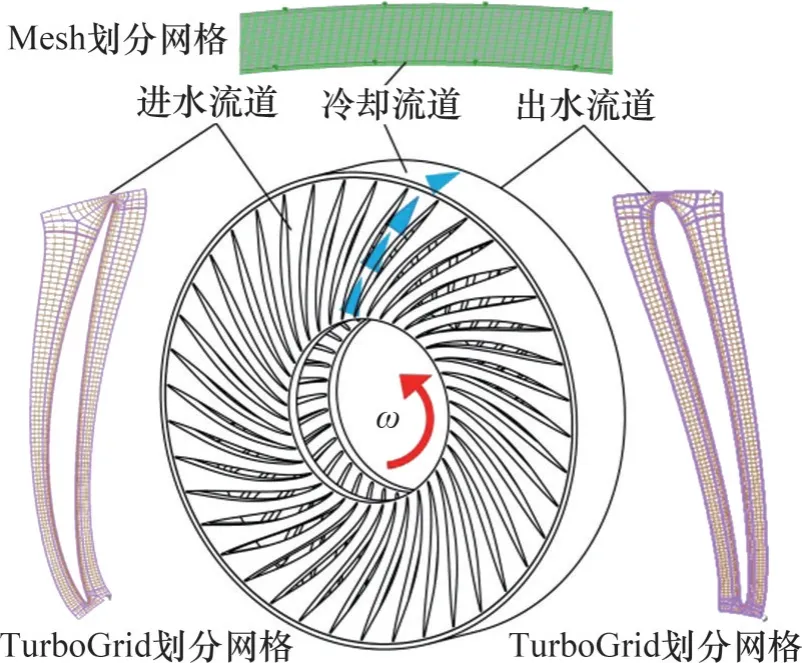
圖6 冷卻輥流道網格分布Fig. 6 Grid distribution of cooling roller channel
由于冷卻輥流道較復雜,需進行網格無關性檢驗來保證試驗的準確性[12]。不同網格數下冷卻輥出口流量Q與換熱通道軸向速度v的對比見表2。由于4種方案所得結果基本一致,為節省時間和節約資源,選擇方案1進行網格劃分。
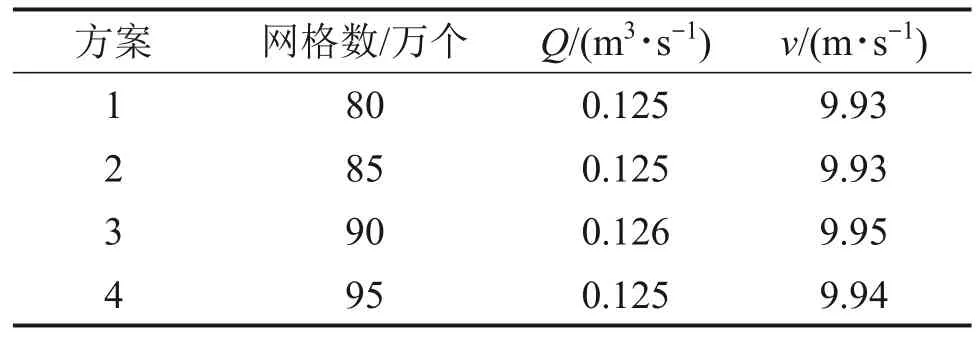
表2 網格無關性驗證Table 2 Grid independence verification
采用標準k-ε湍流模型對流道內流體的流動特性展開研究。根據實際工況設置冷卻輥的旋轉速度為378 r/min,進水面流道入口壓力設置為0.1 MPa,出水面流道出口壓力設置為0 MPa。
冷卻輥肋道、側板、輪轂等設置為無滑移壁面,進水面流道與換熱通道的接觸面選擇為通用連接。采用高階精度進行求解,迭代次數設置為100,收斂精度設置為10-4,采用Expressions 功能對相關參數進行監測。
3 流道多目標優化方法
由于影響流道流動特性的結構參數較多,且進、出水面流道目標函數存在差異,單組流體動力學仿真計算量大,優化過程極為復雜。為此,本文綜合運用BP 神經網絡和GA 遺傳算法,以期提高冷卻輥流道優化時的效率。優化流程如圖7所示。
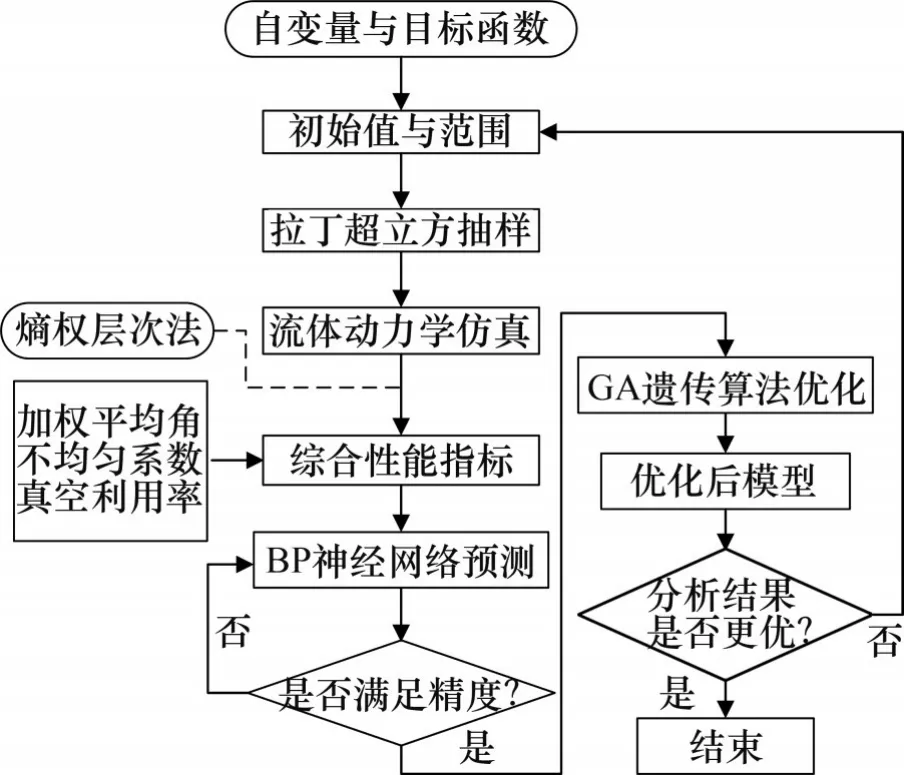
圖7 優化流程Fig. 7 Optimization flow chart
分步對進、出水面流道進行優化,首先,確定影響流道換熱效率的目標函數,進一步采用Plackett-Burman試驗,選出對目標函數影響顯著的自變量;然后,采用拉丁超立方抽樣方法選擇樣本,進一步對樣本進行流體動力學仿真,基于熵權層次分析法獲得綜合性能指標;在多組樣本計算基礎上,通過BP神經網絡對特定自變量參數下的目標函數進行預測,在此基礎上采用GA遺傳算法進行尋優,直至獲得最優解。
3.1 目標函數與自變量確定
3.1.1 目標函數確定
1) 加權平均角。換熱通道內水流軸向速度分量越大,越利于提高水流的更新速率。為提高換熱通道軸向速度分量,引入加權平均角θ來描述換熱通道流速的垂直度。當θ越接近90°,水流越垂直于換熱通道截面時,越有利于水流快速流過換熱通道,從而避免形成環流[13]。
式中:uyi為換熱通道截面切向速度,m/s;uxi為換熱通道截面法向速度,m/s。
2) 不均勻系數。流場速度不均勻會產生渦旋現象,降低冷卻輥水流更新速率。為減小流道水流速度梯度,使流體流動更均勻,引入不均勻系數ξ。
式中:vmax為進水面流道出口最大速度,m/s;vmin為進水面流道出口最小速度,m/s;vave為進水面流道出口平均速度,m/s。為使目標函數統一為求最大值,將不均勻系數ξ變為1/ξ進行計算。
3) 吸入真空度利用率。吸入真空度利用率η即流道的效率,是進行優化的重要指標之一。流道效率越高,流體損失越小。在進水面流道,機械能轉化為流體能量,則進水面流道效率的計算公式為
式中:ρ為流體密度,kg/m3;g為重力加速度,m/s2;Q為冷卻輥流量,m3/s;揚程H=(Pout-Pin)/(ρg),m;Pin和Pout分別為進水面流道進出口總壓,Pa;M為進水面流道葉輪轉矩,N·m;n為冷卻輥轉速,r/min。
3.1.2 自變量及初始范圍確定
進水面流道自變量較多,部分參數對目標函數影響顯著,而剩余參數對目標函數影響不顯著。為簡化優化過程,采用設計軟件Design Expert 進行Plackett-Burman 試驗,選出對進水面流道目標參數影響顯著的自變量。根據之前流道的參數化數據可確定需要篩選的參數有進口安放角α1、包角δ1、出口安放角β1、肋道外側寬度l1、控制點x1對應厚度、控制點x2對應厚度和控制點x3對應厚度。
表3所示為篩選參數對目標函數影響的顯著性分析。P反映了影響的顯著性水平,當P>0.1 時,可認為篩選參數對目標函數影響不顯著;當0.05<P≤0.1 時,可認為篩選參數對目標函數影響較顯著;當P≤0.05 時,可認為篩選參數對目標函數影響極顯著[14]。
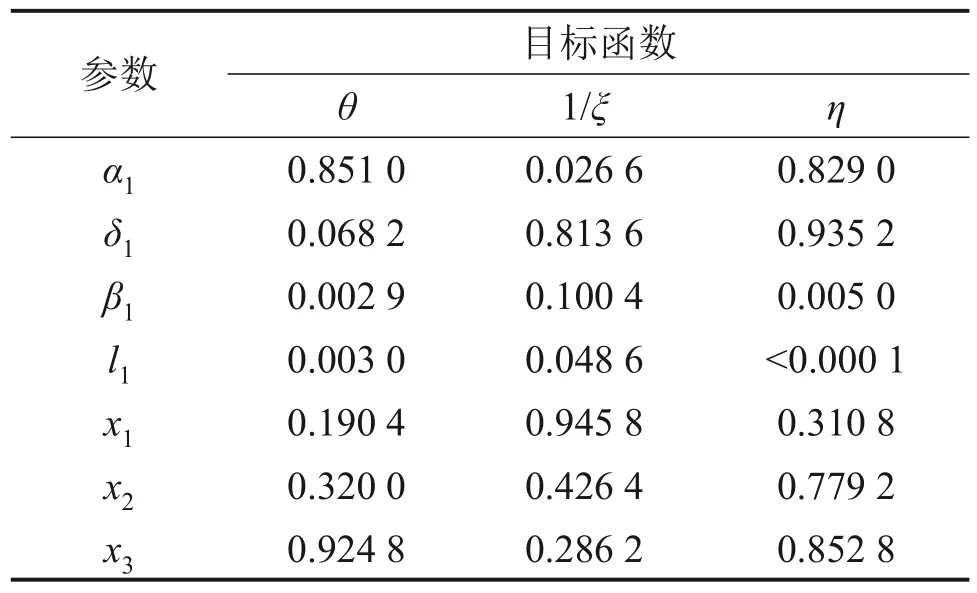
表3 顯著性水平分析(以P表征)Table 3 Analysis of significance level(represented by P)
根據顯著性水平分析表,取進口安放角α1、包角δ1、出口安放角β1、肋道外側寬度l1這4 個自變量進行優化設計,并根據加工與強度等要求初步確定自變量取值范圍:α1∈[55°, 80°],δ1∈[10°, 40°],β1∈[50°, 80°],l1∈[10, 30] mm。
3.2 樣本數據庫建立與多目標決策權重確定
3.2.1 樣本數據庫建立
基于具有均勻分層特性的拉丁超立方抽樣技術,采用Matlab 得到如圖8 所示的60 組樣本數據[15]。
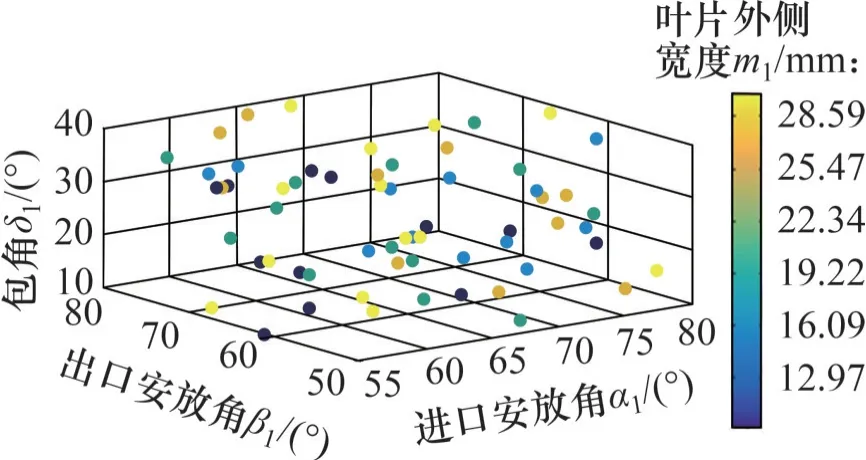
圖8 樣本空間分布Fig. 8 Sample spatial distribution
根據樣本數據,保持換熱通道和出水面流道模型不變,在Blade Gen軟件中建立60組進水面流道模型。利用CFX 軟件中Expressions 功能對加權平均角θ、不均勻系數的倒數1/ξ和吸入真空度利用率η這3個目標函數進行計算,可得到自變量與目標函數對應的數據庫。
3.2.2 多目標決策權重確定
在進行尋優之前,需要確定各個目標函數所對應的權重。為使權重更加客觀且符合實際要求,本文采用一種改進的熵權層次分析法[16]。
熵權法是依據之前建立的數據庫進行計算的,若某目標函數對應的信息熵越小,則其提供的信息量越大,該目標函數所對應的權重也越大。采用熵權法得到的計算結果更客觀,決策可信度也更高,其具體計算過程如下。
設有z個試驗方案,h個目標函數,則z個實驗方案關于h個目標函數的評價矩陣為
由于各目標函數單位不同,采用式(3)將數據范圍限制在[0,1]內,即
則第j個目標函數的熵ej為
式中:K=(lnz)-1,各目標函數的熵的權重為
層次分析法是依據主觀經驗來判斷各項目標函數重要程度的一種加權方法[17]。在對目標函數的重要程度進行兩兩比較后,得到如表4 所示的結果。

表4 層次分析法分析結果對比Table 4 Comparison of analysis results of analytic hierarchy process
表4中的各數值代表該數值所在行的目標函數與所在列的目標函數之間重要程度對比情況,即數值越大,表明該數值所在行的目標函數比所在列的目標函數越重要;數值越小,表明該數值所在行的目標函數比所在列的目標函數越不重要。進一步將表中的數值轉化為矩陣A33,為判斷矩陣的一致性,采用式(11)對一致性比率SCR進行計算。
式中:一致性指數SCI=(λ-h)/(h-1),由此可得隨機一致性指標SRI=0.58,經計算可得矩陣A33的最大特征值λ=3.009 2,代入式(11)可得SCR=0.008,低于0.100,通過一致性檢驗。對最大特征值λ對應的特征向量進行歸一化得到權重系數w。
結合熵權法所得權重系數s和層次分析法所得權重系數w可計算出綜合權重系數f,即
結合樣本數據可求得熵權法權重系數s=(0.32,0.37,0.31),根據主觀經驗可得層次分析法權重系數w=(0.54,0.30,0.16),將相關數據代入式(12)可得綜合權重系數f=(0.52,0.32,0.16)。
3.3 BP神經網絡建模與預測
針對多變量與多參數條件下優化效率低下的問題,采用BP 神經網絡對其目標函數進行預測。如圖9(a)所示,BP 神經網絡包括輸入層、隱藏層和輸出層3部分,可實現輸入層與輸出層的非線性映射關系[18]。完整的BP 神經網絡訓練過程如下:樣本數據通過輸入層進入神經網絡后,在隱藏層進行計算,將輸出結果與期望值進行比較,得到誤差。在神經網絡中進行反向傳播,最后通過計算誤差信號來修改隱藏層的權重,這一過程稱為一次迭代,直到誤差滿足要求,迭代停止。
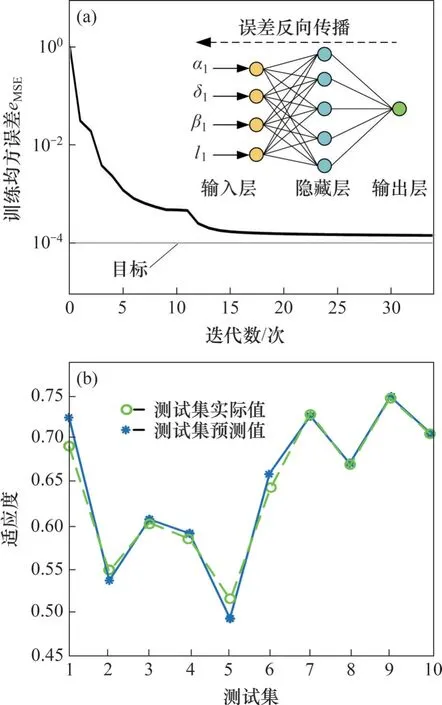
圖9 BP神經網絡預測Fig. 9 BP neural network prediction
為消除量綱對數據分析的影響,對各目標函數值進行歸一化處理。
式中:x和y分別為歸一化前、后的函數值;umax和umin分別為同一目標函數對應的最大值和最小值。
將歸一化數據與綜合權重系數f相結合可得綜合目標函數F。將自變量與綜合目標函數F導入神經網絡中,選取50組作為訓練集,剩下10組為測試集。隨著迭代次數增加,訓練均方根誤差不斷下降,直至收斂。圖9(b)所示為測試集中的預測值與實際值對比,其中預測誤差最大值為4.6%,說明該預測模型具有較高的可靠性,預測結果較準確。
3.4 GA遺傳算法尋優
遺傳算法采用自然界“優勝劣汰”的思想,通過模擬競爭過程中尋找最優目標的方法來形成算法。該算法通過選擇、交叉和變異來保留適應度高的優良個體,從而逐漸尋找到最優解[19]。本文設置迭代次數為100、種群規模為20 來進行尋優,從而得到最優值與自變量數值。在進水面流道優化完成后,采用同樣的方法對出水面流道進行優化,最終尋優結果如表5所示。
表5 進、出水面流道優化結果Table 5 Optimization results of inlet and outlet flow channels
4 結果與分析
軸向換熱通道是冷卻水與輥套熱交換的區域,而進水面流道的流動特性將影響其水流更新速率,為此主要討論進水面與軸向換熱通道內的流動特性。
4.1 進水面流道內流動特性
圖10 所示為改進前后的進水面流道在不同半徑處的壓力對比。從圖10 可見:隨著半徑增大,流體靜壓逐漸上升,與離心式葉片泵的靜壓分布相一致[20],特別是在入口段,新型流道靜壓較為平坦,流速分布更為均勻,能量損失較小;在進水面流道出口處(半徑R=440 mm),優化后非直流道的靜壓高于散射直流道與優化前非直流道的靜壓,可使冷卻水快速流過換熱通道。同時,優化后非直流道的動壓明顯低于散射直流道動壓,有利于減小進水面流道出口與換熱通道的沖擊。
圖10 進水面流道靜壓與動壓對比Fig. 10 Comparison of static pressure and dynamic pressure of the flow channel on the inlet surface
圖11 所示為進水面流道內水流速度矢量與靜壓對比。由圖11 可見:傳統散射直流道有明顯渦旋現象,而優化后非直流道內速度分布更為均勻,壓力損失較小。
圖11 進水面流道速度矢量圖與靜壓云圖Fig. 11 Static pressure and velocity cloud map
4.2 軸向換熱通道內流動特性
軸向換熱通道是冷卻水與輥套換熱的區域,流道內流體軸向速度的大小反映了水流更新速率的快慢。圖12 所示為換熱通道內靜壓與軸向速度對比。從圖12可見:3種類型流道的軸向速度均在距離進水面流道端面60 mm 處達到最大值,此處流道內靜壓為最小值;在0~60 mm 區域內,優化后流道靜壓下降最多,將壓力能轉化為流體動能最多;而在其他區域,優化后流道軸向速度始終大于另外2種流道軸向速度,流道換熱性能最好。
圖12 換熱通道靜壓與軸向速度對比Fig. 12 Comparison of static pressure and axial velocity of heat exchanger channel
表6所示為在一定工況下,傳統直流道與新型非直流道優化前、后對比結果。由表6可見:相比優化前,優化后冷卻輥的流量Q增加5.6%,在換熱通道中部(S=90 mm),軸向速度v提升7.07%,進水流道真空度利用率η提升5.1%。相比散射直流道,優化后冷卻輥流量Q增大25%,換熱通道中部軸向速度v提升21.8%,冷卻輥水流更新速率明顯提升。
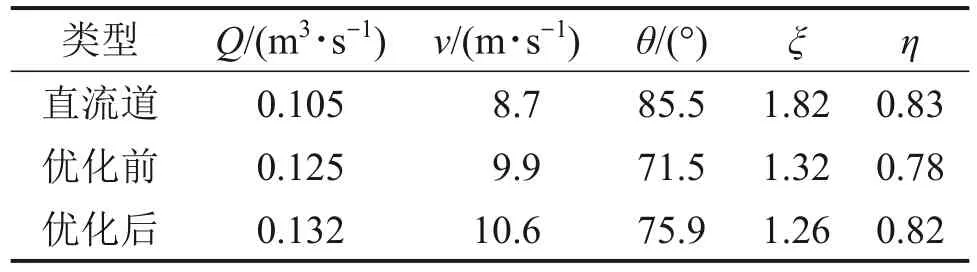
表6 部分性能參數Table 6 Partial performance parameters
5 結論
1) 從流道內流體單元力學分析角度出發可知,進水面采用旋向與冷卻輥轉向相反的肋道、出水面采用旋向與冷卻輥轉向相同的肋道可明顯減小流道渦旋現象,提高水流更新速率。
2) 基于Bezier 曲線進行參數化建模,采用拉丁超立方抽樣克服了數據量大對求解效率的影響,同時采用神經網絡與遺傳算法相結合的多目標優化方法對非直流道參數進行尋優,具有較高的優化效率。
3) 相比傳統散射直流道,在相同工況下,優化后新型差異化非直流道在減少流體渦旋、降低流體沖擊的同時,可使出口流量提升25%,換熱通道中部的軸向速度提升21.8%,達到強化流道換熱、提高水流更新速率的目的。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
