基于SSA和反向傳播神經(jīng)網(wǎng)絡(luò)BP的室內(nèi)定位技術(shù)研究
2023-09-03 14:45:35吳文平
客聯(lián) 2023年5期

摘 要:傳統(tǒng)的基于接收信號(hào)強(qiáng)度指示RSSI的定位算法通過(guò)對(duì)數(shù)正態(tài)陰影模型來(lái)構(gòu)建測(cè)距模型,其中的參數(shù)通常是憑經(jīng)驗(yàn)選擇的,因此對(duì)環(huán)境的影響很敏感。文章提出了一種基于麻雀搜索算法SSA和反向傳播BP神經(jīng)網(wǎng)絡(luò)的室內(nèi)定位方法來(lái)構(gòu)建測(cè)距模型。在所提出的SSA-BP方法中,收集的RSSI值首先經(jīng)過(guò)高斯濾波處理,然后輸入到SSA-BP神經(jīng)網(wǎng)絡(luò)中,以構(gòu)建測(cè)距模型,該模型可以輸出目標(biāo)節(jié)點(diǎn)TN和錨節(jié)點(diǎn)之間的距離值。最后,可以通過(guò)使用最大似然估計(jì)MLE方法來(lái)估計(jì)TN-s位置。仿真結(jié)果表明與現(xiàn)有的BP算法和遺傳算法GA相比,所提出的SSA-BP算法具有更快的收斂速度和更高的定位精度。
關(guān)鍵刺:WSN;RSI;SSA;MLE
一、引言
作為物聯(lián)網(wǎng)IoT和無(wú)線傳感器網(wǎng)絡(luò)WSN的關(guān)鍵技術(shù)之一,室內(nèi)定位最近引起了廣泛關(guān)注。室內(nèi)定位算法根據(jù)是否進(jìn)行距離測(cè)量可分為基于測(cè)距和基于測(cè)距。前者通過(guò)獲得目標(biāo)節(jié)點(diǎn)TN和每個(gè)錨節(jié)點(diǎn)AN之間的距離來(lái)估計(jì)目標(biāo)節(jié)點(diǎn)TN的位置。后者通過(guò)使用無(wú)線鏈路的整體連接性來(lái)估計(jì)TN的位置。與非測(cè)距定位算法相比,基于測(cè)距的定位算法通常具有更高的定位精度。典型的基于測(cè)距的定位算法如下:到達(dá)時(shí)間TOA、到達(dá)時(shí)間差TDOA、到達(dá)角AOA和接收信號(hào)強(qiáng)度指標(biāo)RSSI。其中,基于RSSI的定位算法具有實(shí)現(xiàn)簡(jiǎn)單、成本低、覆蓋范圍廣的優(yōu)點(diǎn)。
在大多數(shù)現(xiàn)有的基于RSSI的定位算法中,TN和an之間的距離是通過(guò)對(duì)數(shù)正態(tài)陰影模型計(jì)算的。然而,這些算法通常會(huì)受到環(huán)境的影響。由環(huán)境引起的測(cè)量誤差,導(dǎo)致測(cè)量的RSSI值的精度下降。因此,最近提出了各種方法來(lái)解決這個(gè)問(wèn)題。使用改進(jìn)的無(wú)跡卡爾曼濾波器對(duì)接收到的RSSI信號(hào)進(jìn)行預(yù)處理,以提高定位精度。提出了一種加權(quán)方法來(lái)減少RSSI值的測(cè)量誤差。提出了基于加權(quán)移動(dòng)平均和反饋平均濾波器的RSSI平滑技術(shù),以減少接收信號(hào)的波動(dòng)和噪聲。
另一方面,機(jī)器學(xué)習(xí)方法由于其良好的準(zhǔn)確性性能也被用于室內(nèi)定位。例如反向傳播BP神經(jīng)網(wǎng)絡(luò)具有良好的非線性擬合能力和容錯(cuò)性。更具體地說(shuō)BP神經(jīng)網(wǎng)絡(luò)的非線性擬合能力可以與卷積神經(jīng)網(wǎng)絡(luò)CNN和遞歸神經(jīng)網(wǎng)絡(luò)RNN相媲美。因此,可以利用BP神經(jīng)網(wǎng)絡(luò)的非線性擬合能力來(lái)構(gòu)建測(cè)距模型。提出了一種基于BP神經(jīng)網(wǎng)絡(luò)的室內(nèi)定位算法來(lái)估計(jì)TN和an之間的距離值用于室內(nèi)定位。提出了遺傳算法GA-BP算法來(lái)構(gòu)建測(cè)距模型。然而,GA-BP算法實(shí)現(xiàn)起來(lái)很復(fù)雜,其性能在很大程度上取決于參數(shù)的選擇。
麻雀搜索算法SSA的仿生優(yōu)化方法。與現(xiàn)有的其他仿生優(yōu)化方法(如遺傳算法)相比,SSA方法具有更好的全局搜索能力、更好的魯棒性和更少的參數(shù)。基于以上討論,在所提出的SSA-BP定位算法中,利用SSA方法對(duì)BP神經(jīng)網(wǎng)絡(luò)的初始權(quán)值和閾值進(jìn)行了優(yōu)化,以提高定位精度。
二、用于室內(nèi)定位的無(wú)線信號(hào)傳播模型
對(duì)數(shù)正態(tài)陰影模型廣泛用于室內(nèi)定位場(chǎng)景,可以描述為:
其中PL(d)和PL(d0)分別表示距離發(fā)射機(jī)d米和d0米處的路徑損耗,通常為d0 1m。X是陰影衰落,其遵循均值為零且方差為2的高斯分布。是路徑損耗因素。
BP神經(jīng)網(wǎng)絡(luò)的基本思想就是通過(guò)使用梯度下降方法來(lái)最小化期望輸出值和實(shí)際輸出值之間的均方誤差。使用的BP神經(jīng)網(wǎng)絡(luò)包含一個(gè)三層結(jié)構(gòu)模型,包括輸入層、隱藏層和輸出層。BP神經(jīng)網(wǎng)絡(luò)主要包括兩個(gè)過(guò)程:信號(hào)正向傳播和誤差反向傳播。信號(hào)的前向傳播是以收集到的RSSI值作為輸入向量,將該向量乘以相應(yīng)的權(quán)重,并將其與相應(yīng)的閾值相加。
麻雀種群形態(tài)可分為生產(chǎn)者和覓食者。在使用SSA優(yōu)化參數(shù)時(shí),我們傾向于將整個(gè)過(guò)程模擬為麻雀尋找食物,而個(gè)體麻雀代表了需要優(yōu)化的參數(shù)。在SSA中,麻雀種群的初始位置是:SSA模擬麻雀種群的覓食行為和反捕食行為。麻雀種群形態(tài)可分為生產(chǎn)者和覓食者。在使用SSA優(yōu)化參數(shù)時(shí),我們傾向于將整個(gè)過(guò)程模擬為麻雀尋找食物,而個(gè)體麻雀代表了需要優(yōu)化的參數(shù)。
三、SSA-BP定位算法
在BP神經(jīng)網(wǎng)絡(luò)的testing階段,通過(guò)隨機(jī)選擇來(lái)獲得BP神經(jīng)網(wǎng)絡(luò)的初始權(quán)值和threshold。由于初始權(quán)值和threshold會(huì)直接影響B(tài)P神經(jīng)網(wǎng)絡(luò)的性能,因此可以采用SSA方法對(duì)BP神經(jīng)網(wǎng)絡(luò)初始權(quán)值和threshold進(jìn)行優(yōu)化,以提高BP神經(jīng)網(wǎng)絡(luò)的收斂速度和魯棒性,避免陷入局部最優(yōu)化。SSA-BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練過(guò)程如下:
步驟1:初始化BP神經(jīng)網(wǎng)絡(luò)的參數(shù),如學(xué)習(xí)率Lr、隱層神經(jīng)元數(shù)量H、輸入層神經(jīng)元數(shù)量N和輸出層神經(jīng)元數(shù)量S。將最大iterm次數(shù)設(shè)置為100。
步驟2:設(shè)定麻雀的初始種群規(guī)模m 20,其中80%是生產(chǎn)者,20%是覓食者。將最大iterm設(shè)置為100。
步驟3:將fitness確定為:
其中tsim(i)是實(shí)際輸出值。yi是預(yù)期的輸出值。
步驟4:初始化麻雀位置,選擇-0.5、0.5之間的隨機(jī)數(shù)作為初始位置X。當(dāng)前全局最優(yōu)位置分配給Xb,全局最優(yōu)適應(yīng)度值分配給fg。當(dāng)前全局最差位置分配給Xw,全局最差適應(yīng)度值指定給fw。
步驟5:根據(jù)(7)-(9)更新人口位置。
步驟6:計(jì)算當(dāng)前位置的fitness,選擇其中最優(yōu)適應(yīng)度函數(shù)。如果其滿足終止條件,則輸出最優(yōu)解并停止迭代。否則,請(qǐng)轉(zhuǎn)到下一步。
步驟7:將當(dāng)前最優(yōu)fitness對(duì)應(yīng)的位置作為下一次迭代的種群初始位置,返回步驟5。而在距離估計(jì)階段,首先通過(guò)Gaussian filter處理在參考節(jié)點(diǎn)處收集到的RSSI值。然后將處理后的數(shù)據(jù)分為Training Sets和Testing Sets來(lái)訓(xùn)練SSA-BP神經(jīng)網(wǎng)絡(luò)。對(duì)于TN,其RSSI值也會(huì)被收集并通過(guò)Gaussian filter進(jìn)行處理。處理后的數(shù)據(jù)會(huì)被送到經(jīng)過(guò)訓(xùn)練的SSA-BP神經(jīng)網(wǎng)絡(luò)中,從而獲得估計(jì)的距離值。而在坐標(biāo)估計(jì)階段,基于SSA-BP神經(jīng)網(wǎng)絡(luò)獲得的距離值,是使用MLE方法計(jì)算TN的坐標(biāo)。
四、結(jié)語(yǔ)
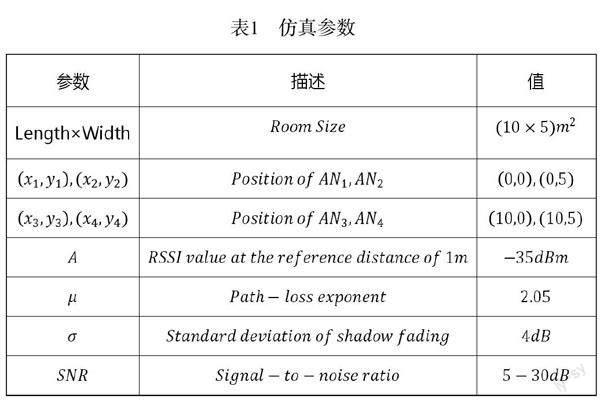
通過(guò)Matlab軟件仿真對(duì)所提出的SSA-BP算法的性能進(jìn)行了評(píng)估。在模擬中,有四個(gè)錨點(diǎn)節(jié)點(diǎn)。參考節(jié)點(diǎn)在(0,0)到(10,5)的范圍內(nèi)每隔0.1m選擇一次。一些重要的模擬參數(shù)如表1所示。
隨機(jī)選擇98個(gè)點(diǎn)作為目標(biāo)節(jié)點(diǎn)來(lái)測(cè)試所提出的SSA-BP算法的性能。定位誤差是通過(guò)計(jì)算目標(biāo)節(jié)點(diǎn)和估計(jì)的目標(biāo)節(jié)點(diǎn)之間的歐幾里得距離來(lái)顯示定位算法性能的方法。在SSA-BP算法中,其中97%的定位誤差小于0.8m,而60%的定位誤差則低于0.4m。
針對(duì)RSSI信號(hào)容易受到測(cè)量噪聲影響的問(wèn)題,提出了SSA-BP定位算法。在所提出的SSA-BP算法中,將SSA引入BP神經(jīng)網(wǎng)絡(luò)以獲得更準(zhǔn)確的距離值,然后通過(guò)MLE方法計(jì)算TN-s位置的坐標(biāo)。所提出的SSA-BP算法避免了傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)容易陷入局部最優(yōu)的問(wèn)題。同時(shí),與現(xiàn)有的BP和GA-BP算法相比,所提出的SSA-BP算法的平均定位誤差分別降低了28%和16%。因此,可以被認(rèn)為是一個(gè)很有前途的室內(nèi)定位方案。
參考文獻(xiàn):
[1] 余學(xué)帆.基于RSSI的無(wú)線傳感器網(wǎng)絡(luò)定位改進(jìn)優(yōu)化算法研究[D].長(zhǎng)春工業(yè)大學(xué),2021.
[2] 李朋朋.基于無(wú)線傳感器網(wǎng)絡(luò)的車輛追蹤復(fù)合定位技術(shù)研究[D].蘭州交通大學(xué),2021.
[3] 吉灤巒,謝宏.重心反向粒子群優(yōu)化算法在無(wú)線傳感器定位優(yōu)化中的應(yīng)用[J].傳感器與微系統(tǒng),2021,40(02):154-156+160.
[4] 印雷,顧德,劉飛.基于改進(jìn)麻雀搜索算法優(yōu)化的DV-Hop定位算法[J].傳感技術(shù)學(xué)報(bào),2021,34(05):670-675.
[5] 宋玲,黃達(dá)勝.一種 基于狼群優(yōu)化的改進(jìn)DV-Hop定位算法[J].計(jì)算機(jī)工程與科學(xué),2021,43(07):1210-1218.
[6] 胡光輝.基于混合粒子群優(yōu)化算法的WSN網(wǎng)絡(luò)覆蓋優(yōu)化控制研究[D].安徽理工大學(xué),2021.
作者簡(jiǎn)介:吳文平(1987—),女,講師,主要研究方向?yàn)闊o(wú)線傳感器網(wǎng)絡(luò)室內(nèi)定位算法。
項(xiàng)目:
1、橫向研究項(xiàng)目(項(xiàng)目編號(hào):2022xhx112,項(xiàng)目名稱:基于無(wú)線傳感網(wǎng)的大數(shù)據(jù)異常預(yù)測(cè)與安全分析系統(tǒng)研究)
2、橫向研究項(xiàng)目(項(xiàng)目編號(hào):2022xhx059,項(xiàng)目名稱:面向智能工廠的無(wú)線傳感器網(wǎng)絡(luò)定位技術(shù)研究)
3、宿州學(xué)院線上課程(項(xiàng)目編號(hào):szxy2022xskc07,項(xiàng)目名稱:無(wú)線傳感器網(wǎng)絡(luò))
4、宿州學(xué)院質(zhì)量工程項(xiàng)目szxy2020ksjy07
5、安徽省教育廳自然科學(xué)研究項(xiàng)目,編號(hào):2022AH051371
6、軟件工程專業(yè)卓越工程師培養(yǎng)創(chuàng)新項(xiàng)目,項(xiàng)目號(hào)2020zyrc163
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34