一種空間目標異動威脅評估的貝葉斯網絡模型*
2023-09-04 02:33:10曲宗華魏春嶺
航天控制 2023年4期
曲宗華,魏春嶺
1.北京控制工程研究所,北京 100094 2.空間智能控制技術重點實驗室,北京 100094
0 引言
近年來,越來越多的國家將戰略重心轉移至太空,在軌航天器數量與日俱增,美國、俄羅斯等國均已建立太空部隊。同時,空間中還存在大量空間碎片,美國聯合太空作戰中心(CSpOC)監測并編目超過10 cm的空間碎片數量已超過2.3萬件[1-2]。碎片與航天器之間的相對運動速度可達每秒千米量級,一旦發生碰撞可能會導致太陽能帆板、燃料貯箱等重要部件受損,使得衛星壽命縮短、部分功能失效,甚至會對航天器造成毀滅性破壞[3]。面對日益復雜的空間環境、愈發惡劣的空間條件,如何及時發現并精準評估空間目標的威脅程度是保障乙方航天器在軌安全穩定運行的關鍵前提[4-5]。
空間威脅評估是空間態勢感知的重要組成部分,主要作用是判定空間目標對乙方航天器的威脅程度。威脅評估的經典方法主要有D/S證據理論[6]、專家系統[7]、貝葉斯網絡[8]等。在空間目標威脅評估方面,王揚洋等[9]提出一種基于視覺特性的臨近目標行為辨識方法。提取抵近的空間非合作目標的特征點并對其進行跟蹤,獲取軌跡的變化并對可能存在的行為進行表征分析,構建特征參數進行行為判斷,通過對不同光照條件的連續圖像進行處理,實現了對抵近觀察較為有效的辨識結果。針對主動接近式的非合作航天器,吳麗君等[10]提出一種威脅指標計算模型,利用雙脈沖 Lambert 算法得到交會所需脈沖沖量和交會時間,以其為威脅要素,選擇最具威脅性的接近路線進行威脅要素的加權,計算得到綜合威脅指標,通過Matlab仿真驗證該模型的準確性和實時性。
此外,威脅評估技術廣泛應用于空戰場和海戰場,如:劉芳等[11]將貝葉斯網絡和逼近理想解法進行融合,通過分析特征指標的依賴關系建立空中威脅評估的指標體系,利用貝葉斯進行動態威脅度等級概率推理,同時構造模糊貝葉斯推理結果與逼近理想解矩陣映射關系,實現對空中多目標威脅程度的準確排序。高擎峰等[12]設計了一種閉環動態貝葉斯網絡用以評估空間目標威脅,但該網絡模型的節點數較少且采用直接分類的方法對相對位置等節點進行賦值,難以準確刻畫變化趨勢,同時對于復雜場景和連續變化的時間片威脅評估能力仍有待提升。
由于空間目標的異動行為隱蔽性強,單一維度數據或底層特征存在局限性,難以對目標的潛在威脅進行準確刻畫。因此,需融合更高級別特征、先驗知識等多源信息實現空間目標異動行為的威脅評估。本文引入空間目標的運動、形態等異常特征,歷史行為、目標類型等先驗知識和相對距離、相對速度等數據信息,在分析這些信息的依賴關系基礎上,設計一種基于離散模糊貝葉斯網絡的空間目標異動行為威脅評估模型,實現典型場景下的空間目標威脅評估。本文的行文思路是:介紹貝葉斯網絡結構和推理過程;針對空間目標異動行為威脅評估問題開展指標選取和指標賦值的研究工作;在此基礎上,分析選取指標間的依賴關系,構建基于離散模糊貝葉斯網絡的威脅評估模型;之后,通過模擬空間中抵近繞飛和碰撞2種典型場景,利用威脅評估模型推理和分析各個時間步的威脅程度;最后,給出全文的結論。
1 貝葉斯網絡原理
貝葉斯網絡(Beyesian Network,BN)以概率論和圖論為基礎,結構是一個有向無環圖(Directed Acyclic Graph,DAG),由節點和節點之間的有向弧段組成,也被稱為信度網絡或概率網絡。節點代表的是隨機變量,可以為連續變量或離散變量。有向弧是節點之間的有向連接,代表的是隨機變量之間的依賴關系,是一種因果關系的呈現。節點可以分為父節點和子節點,若有向弧從A節點指向B節點,則B節點為子節點,反之A節點為父節點。特別地,沒有父節點的節點為根節點,沒有子節點的節點稱為葉節點。條件概率表(Conditional Probability Table,CPT)代表的是節點變量之間互相的依賴關系,是一種定量描述方式。貝葉斯網絡可以被定義為:
BN=〈G,Θ〉
(1)
式中:BN代表貝葉斯網絡,G代表貝葉斯網絡中對應的有向無環圖表示形式,Θ代表貝葉斯網絡的參數集合,由一系列條件概率組成。進一步的,G可表達為:
G=(V,E)
(2)
式中:V代表節點變量,E代表節點變量之間的依賴關系(有向弧集合)。
圖1為一種貝葉斯網絡結構。A是C和D的父節點,B是D和E的父節點,D同時為A和B的子節點。貝葉斯網絡結構可以對屬性之間的條件獨立性進行有效表達,假設貝葉斯網中每個屬性都和非后裔屬性獨立。
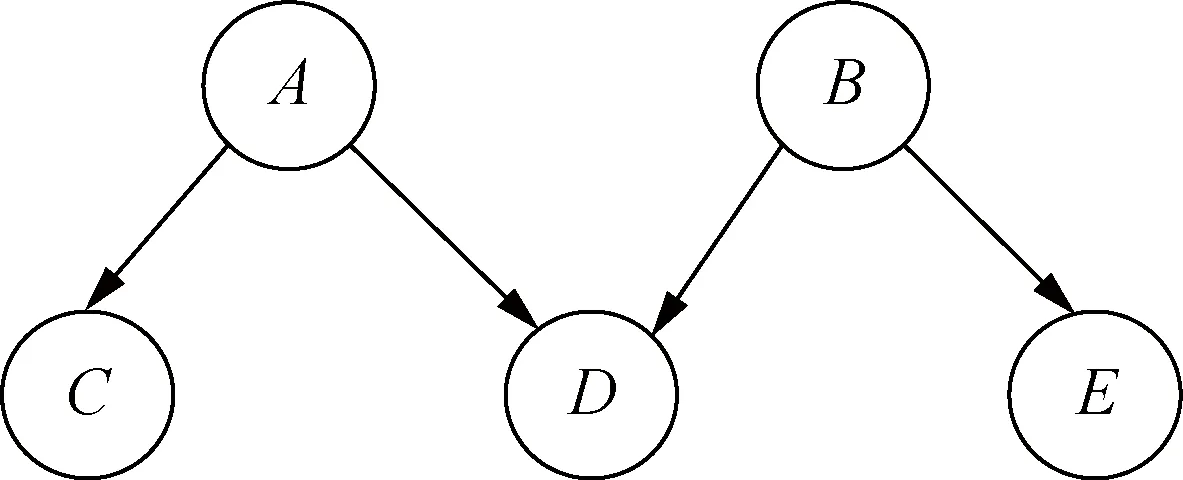
圖1 貝葉斯網絡示意圖
由圖1貝葉斯網絡可以得出,該網絡節點A、B、C、D和E的聯合概率分布表達式為:
P(A,B,C,D,E)=
P(A)P(B)P(C|A)P(D|A,B)P(E)
(3)
以此類推,貝葉斯網絡中所有隨機變量的聯合分布概率可以表達為:
(4)
式中:fparent(xi)代表節點xi的父節點,各個節點的概率連乘后即可獲得所有隨機變量聯合分布的概率取值情況。
2 威脅評估模型指標
2.1 威脅指標選取
在進行網絡搭建時,首先需要關注與威脅程度關系密切的節點。通過分析,影響威脅評估的各個關鍵節點(因素)的名稱分別為:
1)目標形態異常特征(Abnormal Morphological Features,AMF):根據傳感器采集的圖像數據等信息判定是否存在相機持續對準已方航天器等形態異常;
2)目標所處軌道階段(Orbital Phase,OP):通過時序序列處理方法對空間非合作目標的軌道階段進行預測并作為貝葉斯網絡的輸入,可分為軌道保持、抵近、繞飛和飛離4種狀態;
3)空間目標與乙方航天器之間的相對距離(Relative Distance,RD):相對距離較遠時受到探測器探測距離等因素限制,對乙方航天器造成威脅的可能性相對較低,而威脅程度將隨著相對距離的縮短而逐漸加大;
4)空間目標與乙方航天器之間的相對速度(Relative Speed,RS):相對速度快則代表該目標的機動性較好,抵達我方附近的用時較短,潛在威脅程度相對更大;
5)歷史行為(History Behavior,HB):有些空間非合作目標既往已對乙方航天器或其它類型航天器產生迫近、偵察等異常擾動行為,此時可以判定該目標在空間中的意圖不純,對我方的潛在威脅性更高;
6)光照條件(Light Conditions,LC):當太陽光照與目標航天器之間的夾角小于30°時,光學成像條件有利于獲取空間非合作目標的圖像數據,圖像分割的準確程度相應有所提升;
7)空間目標所屬類型(Target Type,TT):該目標類型與威脅程度有較大關系,如只是空間碎片或廢棄衛星等無機動能力的空間目標,則其主動改變軌道或產生威脅的可能性較低;
8)載荷工作狀態(Payload Working Condition,PWC):載荷是否面向待觀測的空間非合作目標,若保持正常工作狀態,則能夠獲取目標的最新狀態數據,有助于精準評估威脅;
9)探測條件(Detection Condition,DC):在光照條件的基礎上,結合相對距離和載荷工作狀態判定當前的探測狀態,若探測條件好則發現空間目標異常行為的可能性大;
10)告警信息(Alarm Information,AI):綜合是否存在異常形態和歷史上有無迫近擾動行為,系統是否存在相應的預警信息;
11)靜態威脅(Static Threats,ST):結合空間目標類型和探測條件等指標,綜合判定靜態條件下的威脅程度;
12)動態威脅(Dynamic Threats,DT):結合相對距離、相對速度和軌道目前階段的運動特征等指標,綜合判定動態條件下的威脅程度;
13)威脅估計(Threat Estimation,TE):結合預警信息、動態和靜態條件下的威脅情況綜合評估已方航天器的潛在威脅程度。
節點集合情況如表1所示。
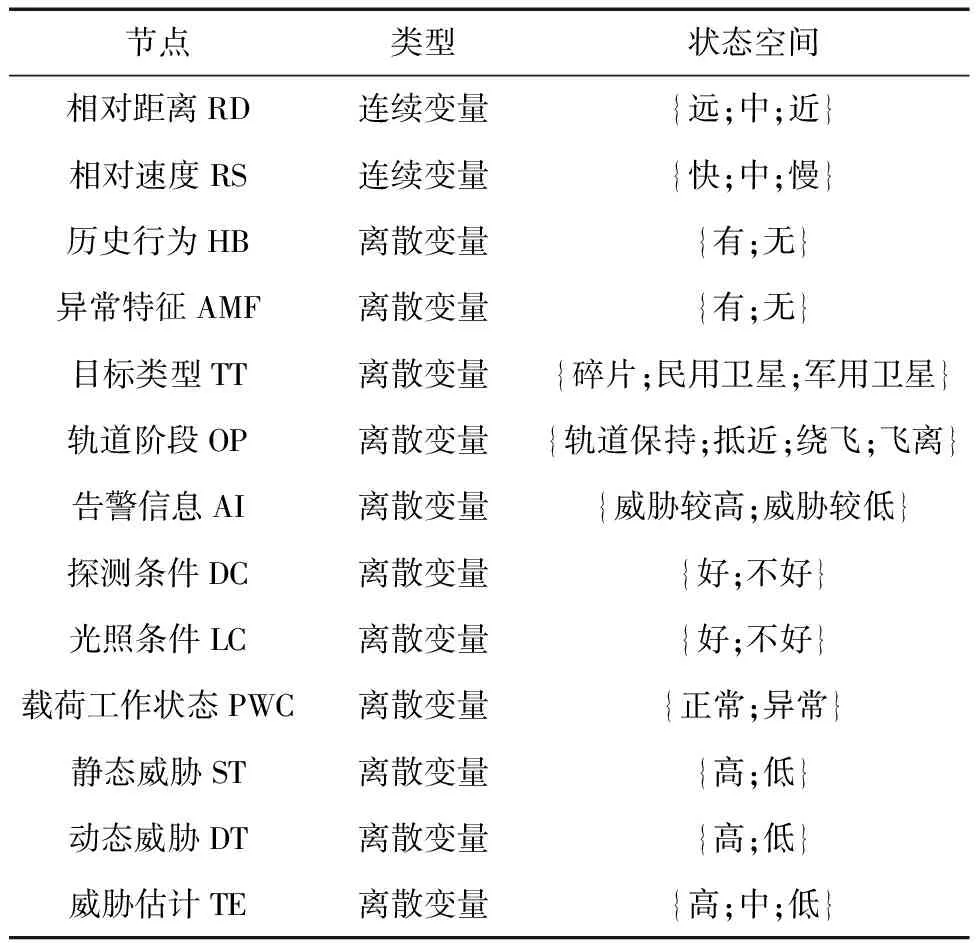
表1 節點集合
2.2 威脅指標取值范圍
當輸入的數據類別為離散變量時,可以直接判斷所屬類型,此時可通過該類型結果取1,其他類型取0的方式賦值節點。
但當輸入的數據類型為速度和距離等連續變量時,采用模糊集合的方式計算其歸屬的類別以化為離散型變量。在進行離散化計算時,采用隸屬度函數確定連續變量取值所對應的節點狀態概率值。
隸屬度函數的定義為:模糊集合中,某個元素屬于該模糊集合的程度大小,可用μA(x)表示[13]。其中:μ代表隸屬度函數,A代表模糊集合,x代表模糊集合中的某個元素。
由于本文涉及的威脅評估節點的相對速度和相對距離均為三分類的類別歸屬問題,因此可采用相同的隸屬度函數模型:當數值較小時,采用z型隸屬度函數;當數值較大時,采用s型隸屬度函數;數值取中間時,利用減去其余2種隸屬度的方法進行隸屬度計算。模糊集合中各類型的隸屬度計算表達式如下:
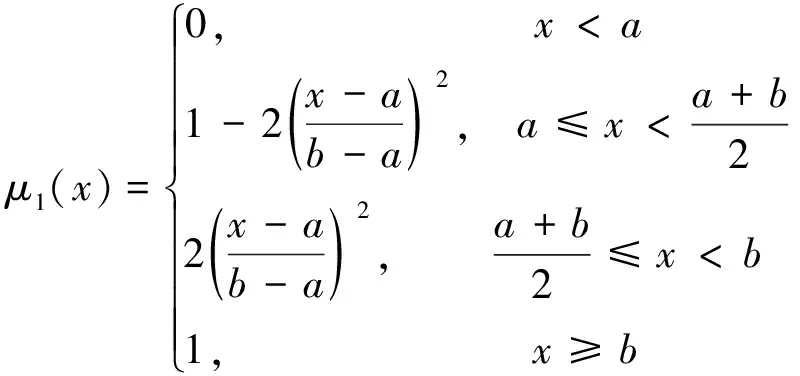
(5)
(6)
(7)
在此基礎上,相對距離和相對速度的隸屬度函數對應參數a,b,c和d的取值情況如表2所示。
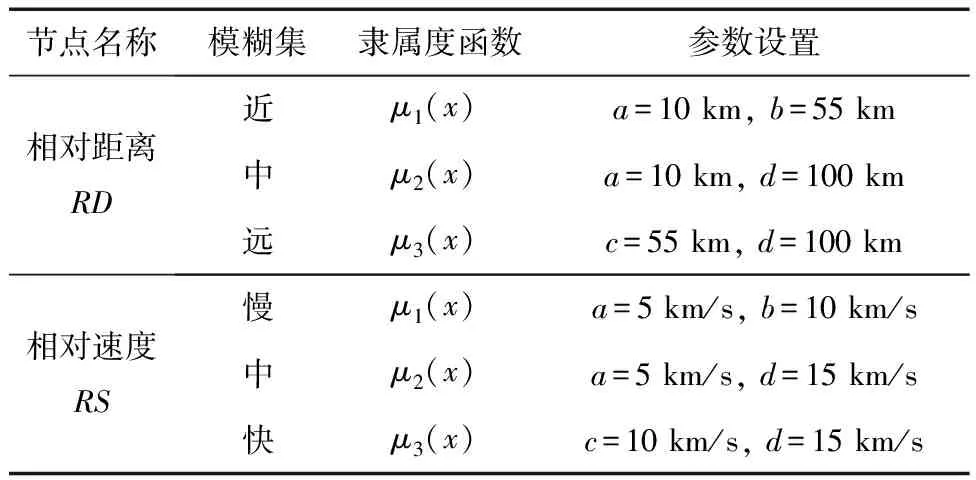
表2 節點隸屬度函數參數取值表
在此情況下,對于相對速度和相對距離的隸屬度關系如圖2~3所示。
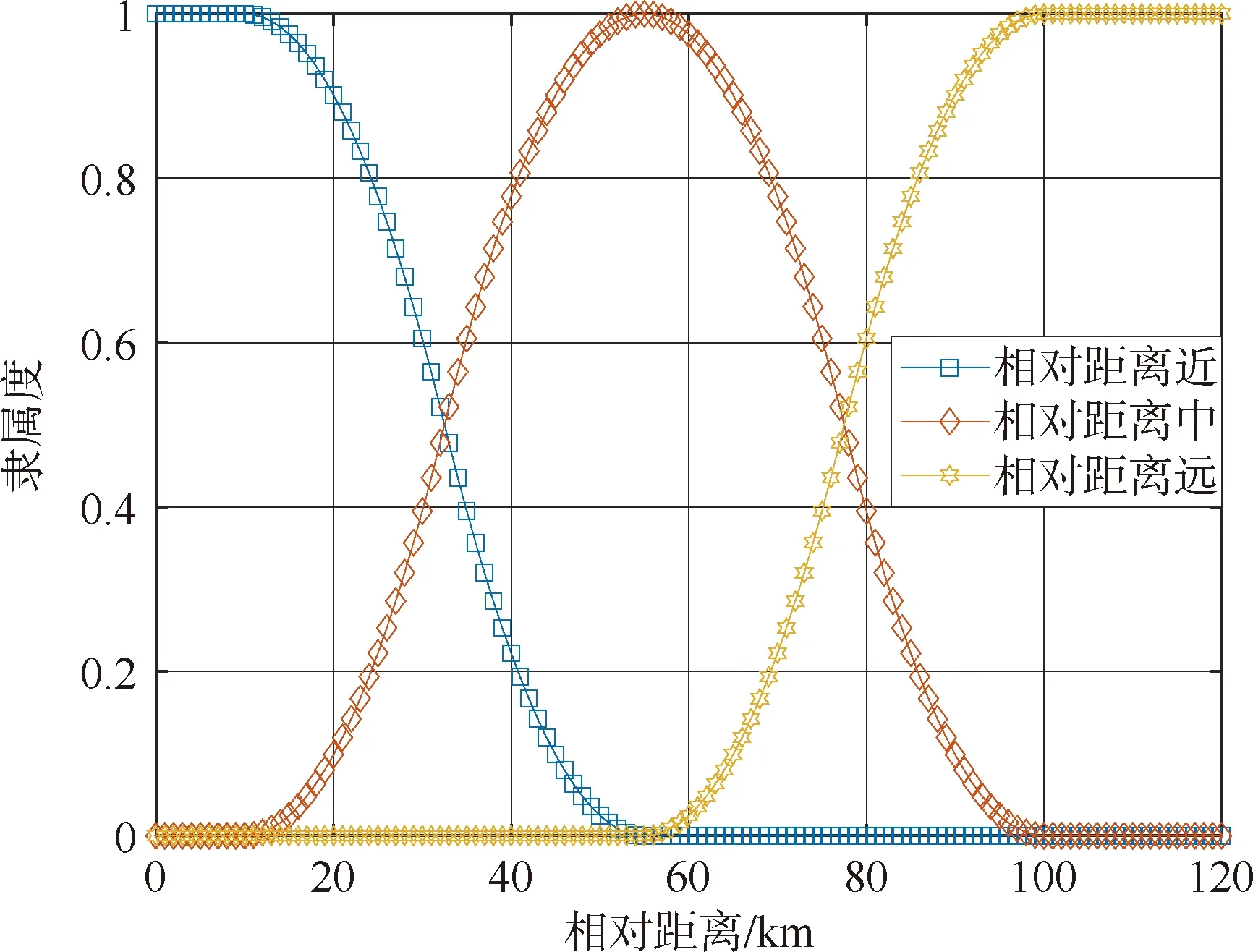
圖2 相對距離隸屬度函數
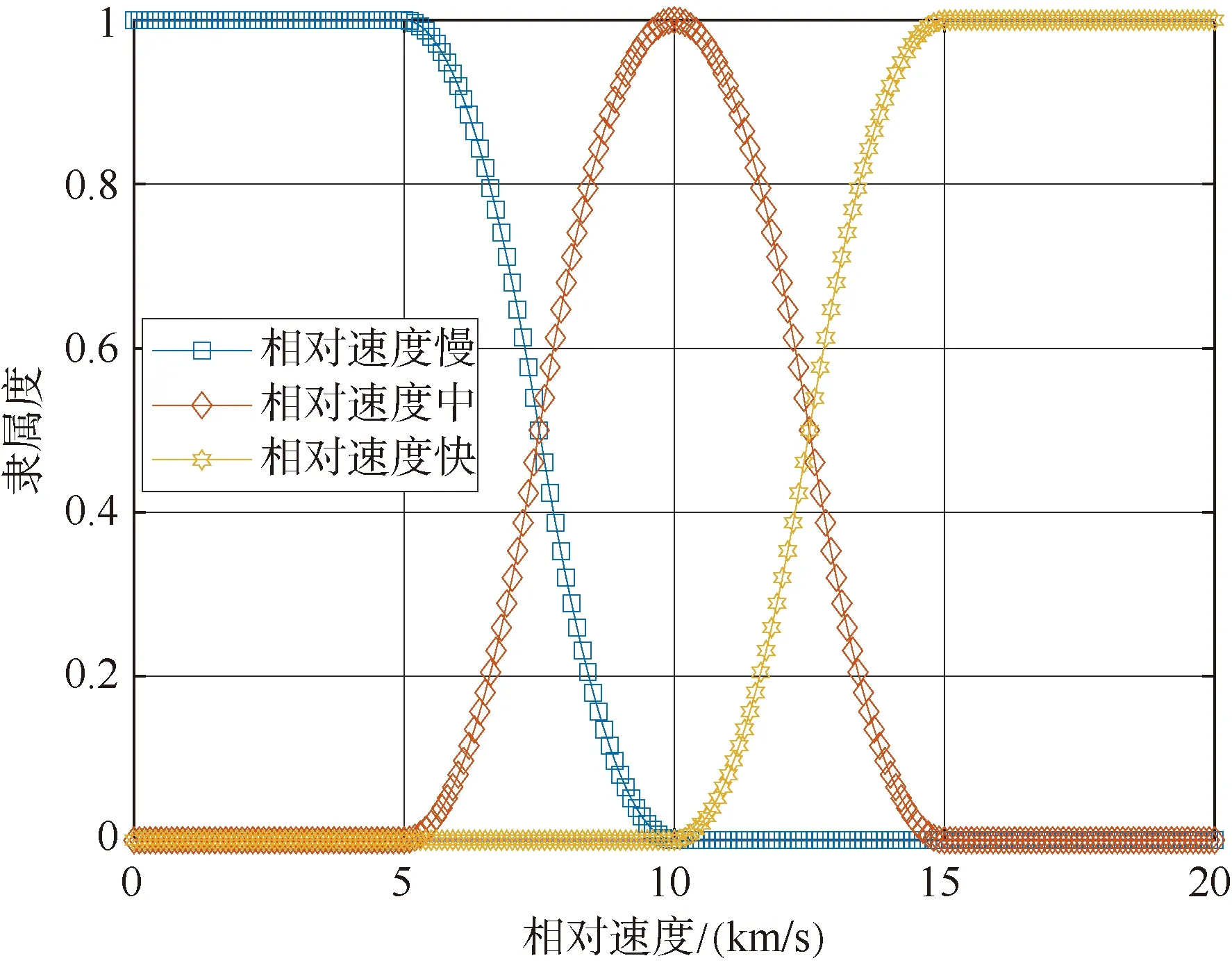
圖3 相對速度隸屬度函數
3 空間目標威脅評估模型構建
空間目標的威脅度主要由動態威脅度、靜態威脅度和預警信息決定,其中:影響預警信息的主要因素包括歷史是否有擾動行為、是否存在形態異常等;影響動態威脅度的主要因素包括相對距離、相對速度和軌道階段;影響靜態威脅度的主要因素包括目標類型與探測條件,探測條件中主要包括相對距離、光照條件和載荷工作狀態等影響因素。
在構建貝葉斯網絡前,首先分析威脅評估的數據處理過程,獲得的原始數據包括各類傳感器獲得的數據信息,以及在空間編目列表中可能會獲取到的目標是否進行過擾動行為、空間目標類型等先驗數據。在此基礎上對數據進行預處理,計算相對位置、速度關系等信息,利用圖像分割等技術提取形態異常特征、利用長短期記憶網絡等時序序列處理方法計算空間目標所處軌道階段,識別軌道階段等節點取值的推算工作。之后,將預處理階段獲得的所有貝葉斯網絡節點信息送入網絡,其中離散變量被直接送入網絡,連續變量根據隸屬度函數離散化計算類別隸屬度后送入網絡。最后,通過貝葉斯網絡中先驗概率及條件轉移概率等進行推理分析,融合多源信息,最終獲得對于空間目標威脅程度的綜合評估。威脅評估模型的數據處理過程如圖4所示。
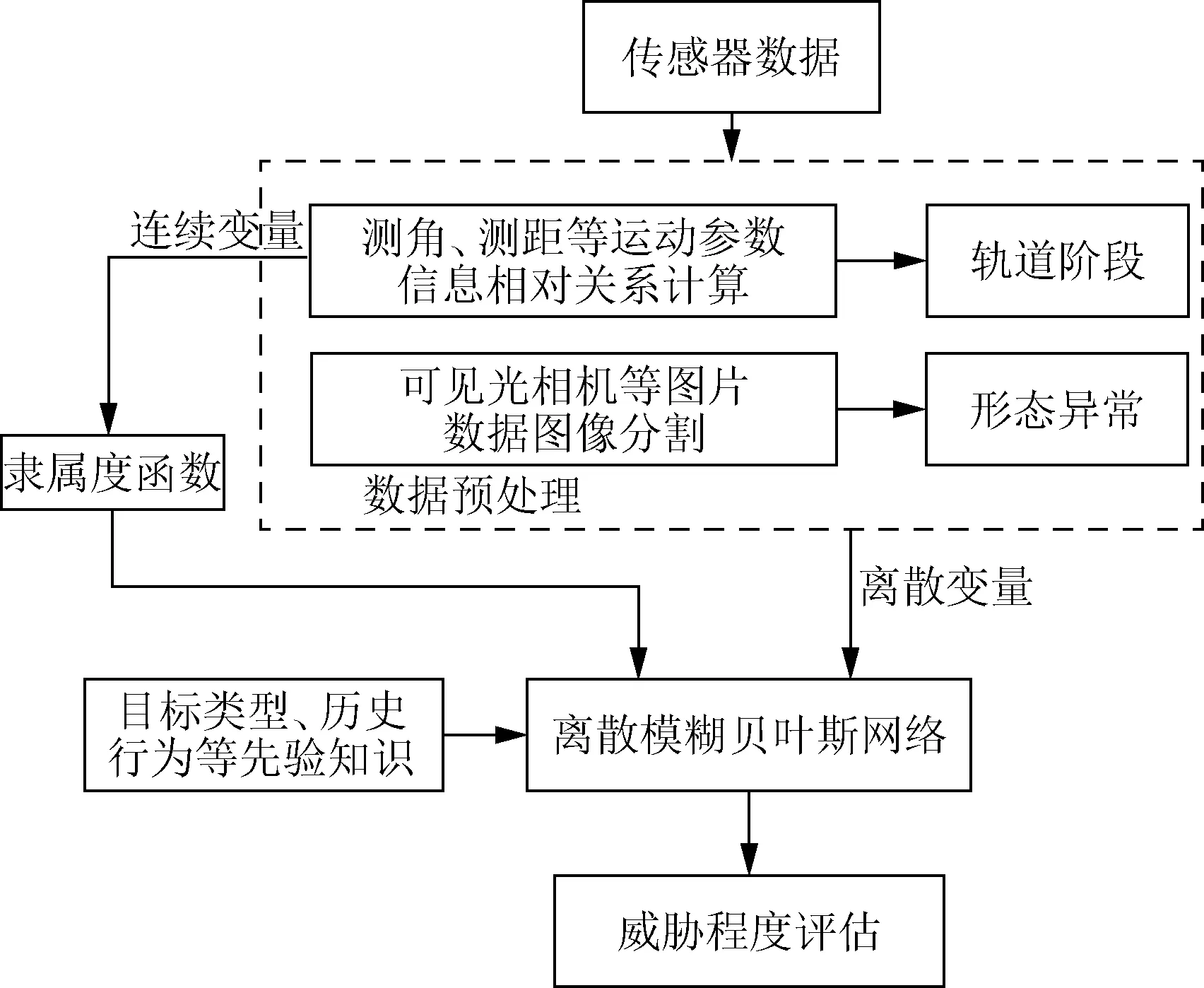
圖4 空間目標異動行為威脅估計數據處理過程
在數據流圖基礎上,分析2.1節中威脅評估影響因素之間的依賴關系,構建模糊離散貝葉斯網絡模型(圖5)。在網絡結構確定后,需要設置貝葉斯網絡中的參數,主要包括節點先驗概率和節點間的條件概率。先驗概率代表依據歷史數據,節點所屬各類別的出現概率。在本文中,若無父節點的節點未觀測到數據時,利用該節點的先驗概率進行推理計算。條件概率表是貝葉斯網絡中的必要基礎數據,代表節點間依賴關系的強弱。在確定網絡結構的基礎上,給定條件概率表可以通過已觀測的節點推理未觀測的節點。條件概率表的獲取方式主要有根據先驗數據學習得到相關參數或通過咨詢領域專家給出相關數據的方式。本文依據專家知識給出各節點的條件概率表。
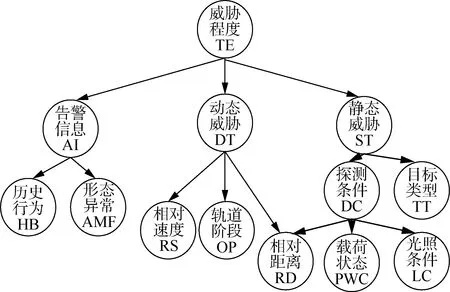
圖5 基于貝葉斯網絡的空間目標異動威脅估計框架
告警信息作為威脅判斷中重要影響因素,可以反映空間目標的異常特征。告警級別的高低由歷史上有無擾動和形態是否有異常決定,是一種典型的同父結構,條件概率表如表3所示。
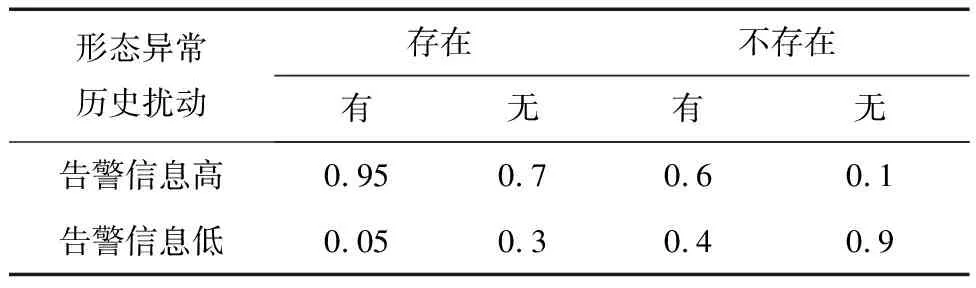
表3 告警信息條件概率表
動態威脅反映的是動態指標對乙方航天器威脅情況,其取值的大小由相對速度、相對距離和軌道異常預測的節點決定,是一種同父結構,動態威脅的條件概率如表4~6所示。

表4 動態威脅條件概率表(相對速度快時)

表5 動態威脅條件概率表(相對速度中時)

表6 動態威脅條件概率表(相對速度慢時)
探測條件反映的是當前狀態下已方航天器具備的探知威脅能力受到相對距離、光照條件和載荷工作條件的影響,狀態概率如表7所示。

表7 探測條件條件概率表
靜態威脅反映的是靜態信息對空間目標的威脅程度。在得到探測條件狀態概率表的基礎上,靜態威脅級別的高低由目標類型和探測條件共同決定。靜態威脅級別的條件概率如表8所示。

表8 靜態威脅條件概率表
在此基礎上可推理得到空間目標的整體威脅程度,該指標由告警信息、動態威脅和靜態威脅共同決定。空間目標的威脅程度條件概率如表9所示。

表9 空間目標綜合威脅程度估計條件概率表
4 仿真校驗
4.1 場景設定
4.1.1 場景一——抵近繞飛
該場景共設置20個時間步(第0~19步)。在該場景下,空間目標首先由軌道保持狀態(第0步至第1步)轉為軌道接近狀態(第2~8步),而后抵達已方航天器周圍時再次機動變為自然繞飛狀態(第9~16步),最后變為飛離狀態(第17~19步)。假設該航天器歷史無擾動行為,繞飛軌道前無形態異常特征,繞飛后存在異常特征(第10~15步)。載荷工作狀態在各時間步均為良好。光照條件在軌道繞飛階段存在較差的情況(第12~15步),其余時間步均為良好。該空間目標類型為軍用衛星。
4.1.2 場景二——碰撞
該場景共設置24個時間步(第0~23步)。在該場景下,空間目標與已方航天器之間的相對距離逐漸減小,最終發生碰撞時相對距離變為0。假設初始狀態下航天器之間的相對距離為100 km。空間目標的光照條件和載荷工作狀態全程保持良好,起始階段軌道為保持階段(第0~2步),后續為抵近階段(第3~23步)。該空間目標類型為軍用衛星。
4.2 實驗結果分析
場景一相對距離、速度、靜態和動態威脅節點屬性隸屬度隨時間步的變化情況如圖6~9所示。
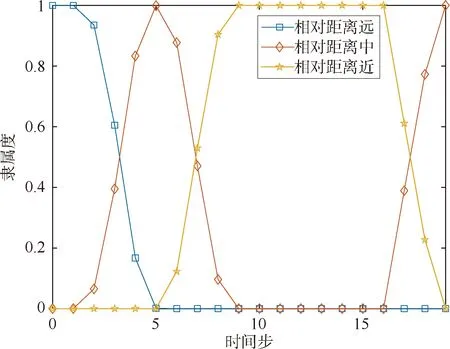
圖6 場景一相對距離節點隸屬度變化趨勢
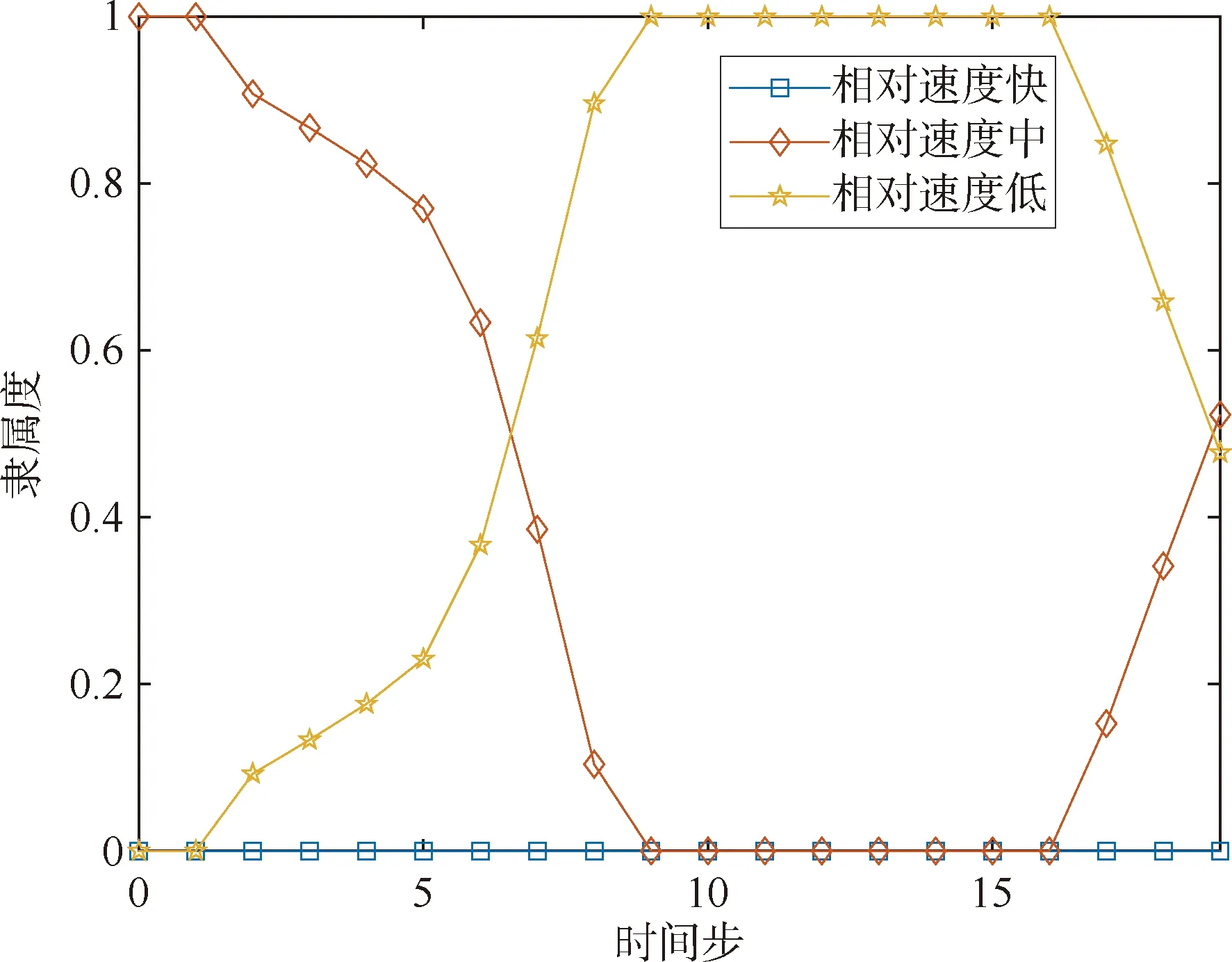
圖7 場景一相對速度節點隸屬度變化趨勢
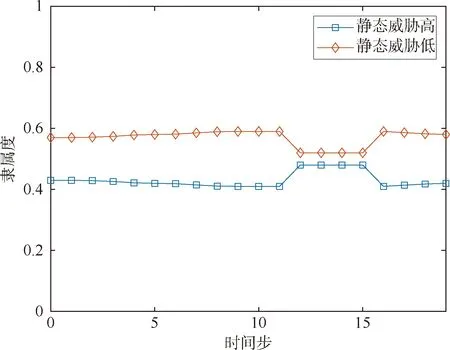
圖8 場景一靜態威脅節點隸屬度變化趨勢
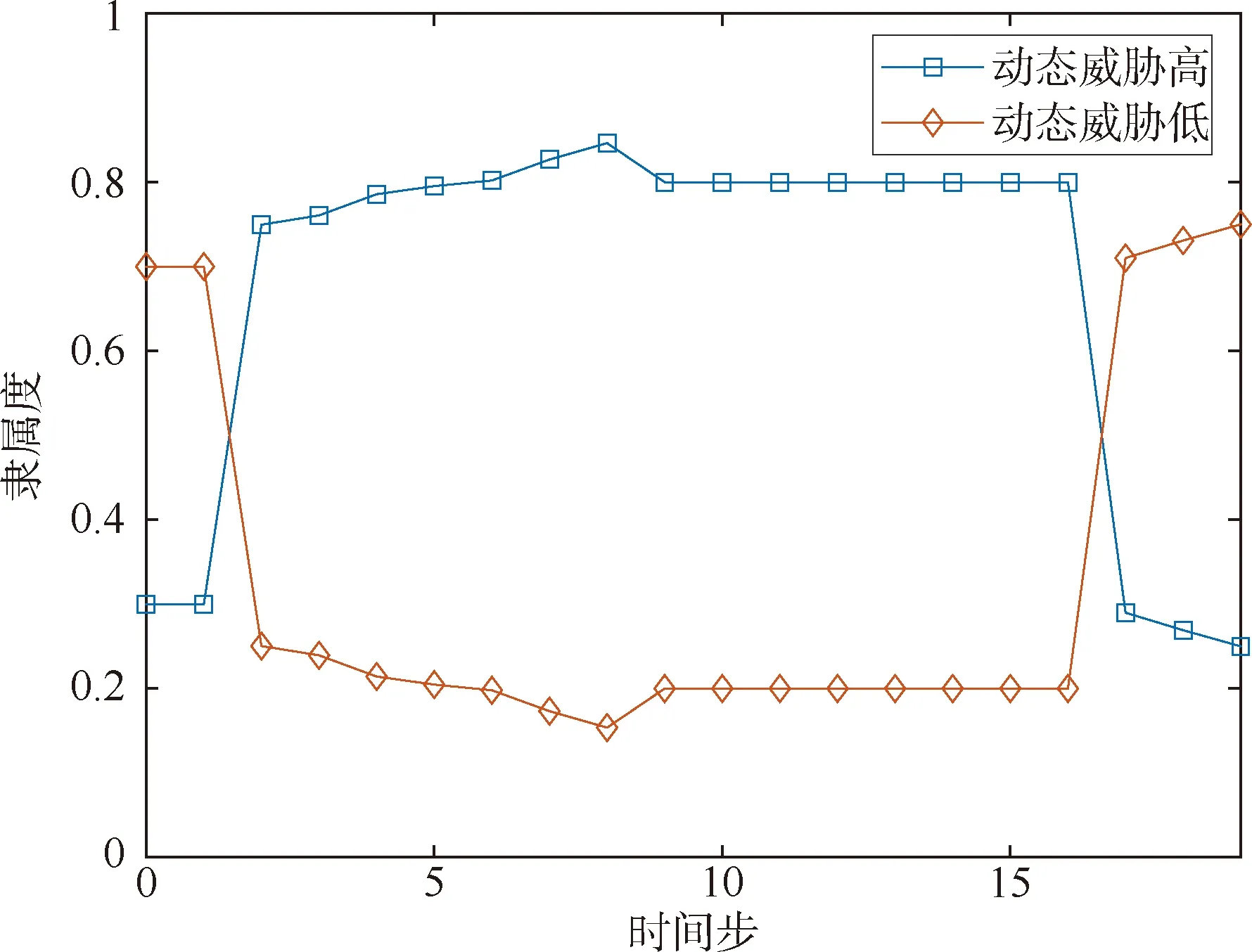
圖9 場景一動態威脅節點隸屬度變化趨勢
由場景一節點隸屬度變化趨勢可以看出:第2步時由于軌道特征發生轉變、相對距離較第1步縮短,“動態威脅高”的隸屬度從0.3上升至0.7496,同時,相對距離的縮小有助于已方航天器載荷探測威脅,靜態威脅呈現緩慢下降的趨勢。到第9步軌道變為繞飛狀態時,由于進入到“相對距離近”的區間,因此相對距離不再對動態威脅節點產生額外影響,但由于相對速度減小到“相對速度慢”的區間,因此動態威脅特征有小幅度下降。第10步由于檢測到形態異常特征,因此“告警信息高”隸屬度從0.1上升至0.6。由于繞飛過程中存在陰影區的問題,光照條件出現短暫“光照條件不好”的屬性,很大程度上影響了靜態威脅的評估,第12步“靜態威脅高”隸屬度從0.41上升至0.48。最后一個階段,由于空間目標的軌道特征轉變為飛離狀態,同時相對速度和相對距離均隨時間增長而增大,因此動態、靜態威脅均有不同程度的下降。在場景一條件下,空間非合作目標異動行為威脅估計隸屬度變化趨勢如圖10所示。
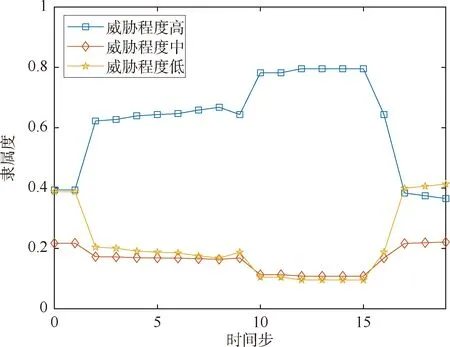
圖10 場景一威脅程度隸屬度變化趨勢
從圖10可以看出,威脅程度隨空間目標進行的動作在不同時間步呈現較大變化。空間目標由軌道保持狀態變為軌道抵近狀態時,“威脅度高”隸屬度從0.3941變為0.6225,較好地反映了這一改變對已方航天器威脅增長的情況。在第2~8步,隨著相對距離的不斷縮小,威脅程度也在不斷增長。第9步時,由于機動后進入對已方航天器的繞飛軌道,暫時避免直接碰撞,相對速度、相對距離均由最小的隸屬度表示,不再產生更多影響因素,因此威脅程度出現短暫下降。但第10步空間目標開始繞飛后,目標開展偵察等威脅動作,使得形態處于異常狀態,導致“威脅度高”隸屬度從0.6438提升到0.7821。第11步開始目標進入陰影區,光照條件惡化導致難以持續對非合作目標跟蹤觀測,威脅程度進一步上升,“威脅度高”隸屬度達到最高0.7956。從第16步結束陰影區和異常形態開始,威脅程度持續下降,并隨著空間目標的飛離,威脅程度明顯下降。從場景一各個時間步的威脅程度看,本文采用的離散模糊貝葉斯網絡威脅評估模型能較好地反映不同時段、空間目標不同狀態下的威脅程度,具備實際應用價值。
場景二相對距離、探測條件和動態威脅屬性隸屬度隨時間步的變化趨勢如圖11~13所示。
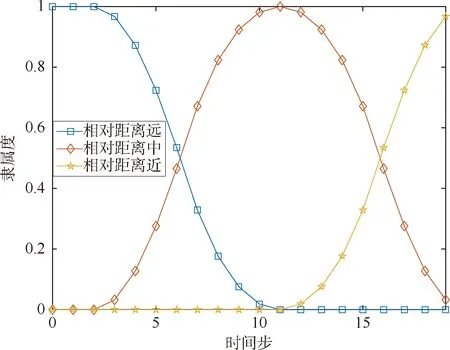
圖11 場景二相對距離節點隸屬度變化趨勢
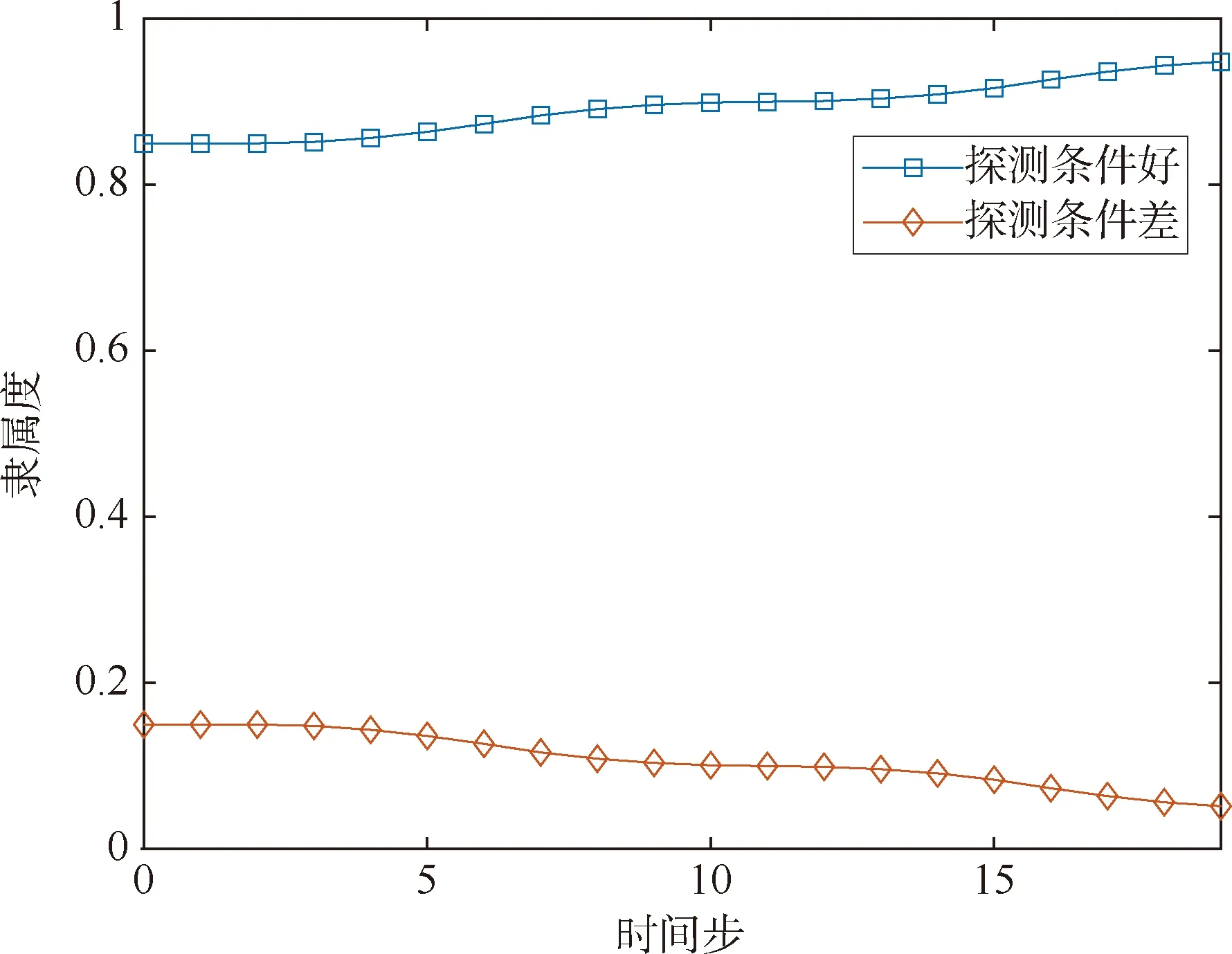
圖12 場景二探測條件節點隸屬度變化趨勢
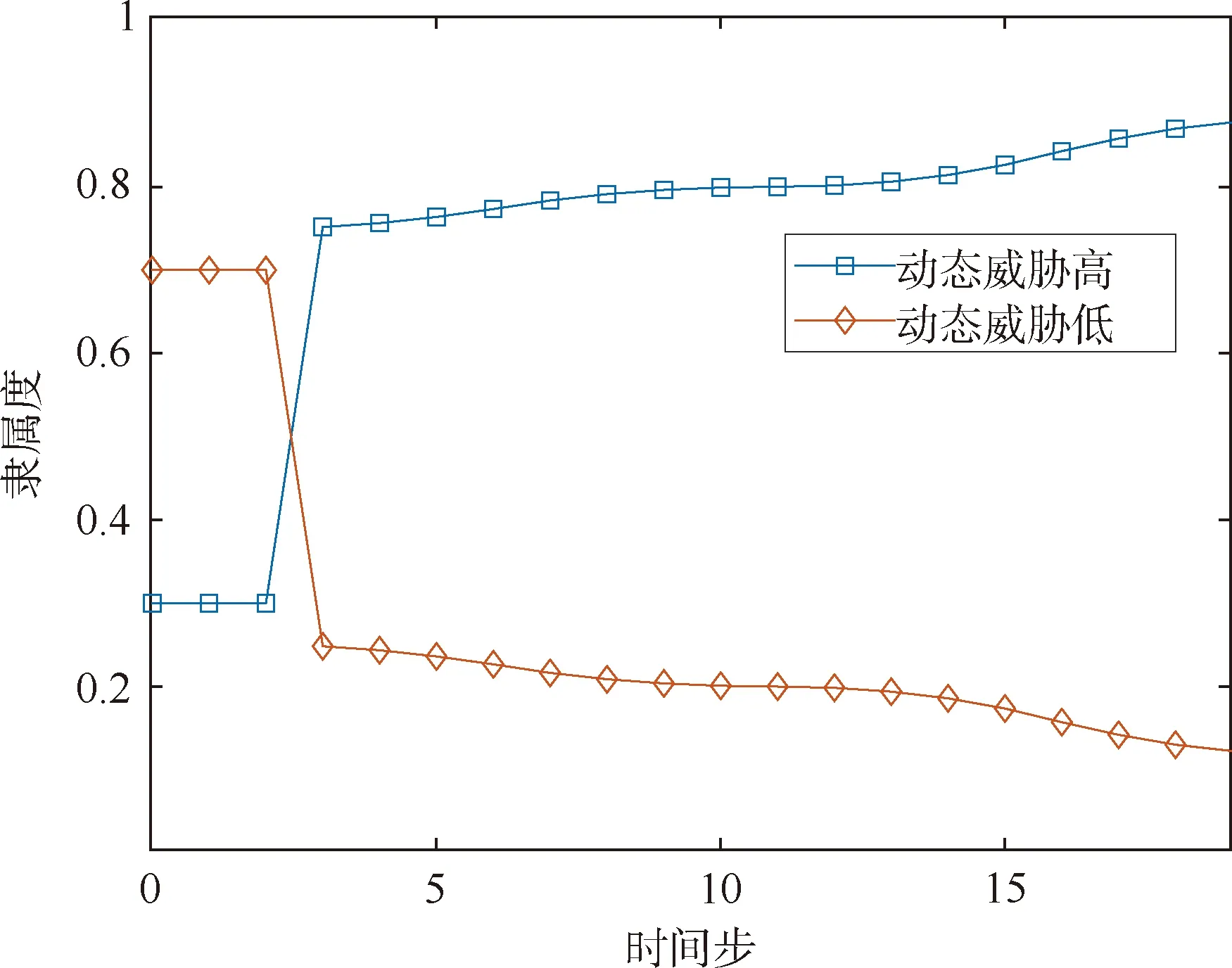
圖13 場景二動態威脅節點隸屬度變化趨勢
由場景一節點隸屬度變化趨勢可以看出:相對距離隸屬度隨著空間非合作目標距離的不斷縮短,模糊集合“近”的隸屬度也逐漸增大,最終“相對距離近”的隸屬度變為1。相對距離影響探測條件節點,因與空間目標的距離縮短、載荷工作條件良好,因此“探測條件好”的隸屬度呈逐漸增大的趨勢。由于在本場景下目標類型已確定,因此靜態威脅條件的動態變化只與探測條件相關,并且探測條件的變化趨勢較緩使得靜態威脅程度并沒有隨著距離縮短而產生太大影響。相比之下,相對距離直接影響動態威脅節點的取值,由于第3步探測到軌道階段發生異常,“動態威脅高”的隸屬度直接從0.3變為0.7516,提高了150%。從第3步起,軌道階段和相對速度(本場景中相對速度設定為“中”)均保持不變,隸屬度的變化完全取決于相對距離的變化,而相對距離的逐漸縮短也使得“動態威脅高”的隸屬度從0.7516不斷上升,在相撞前達到最高值0.88。在場景二條件下,空間非合作目標異動行為威脅估計隸屬度變化趨勢如圖14所示。
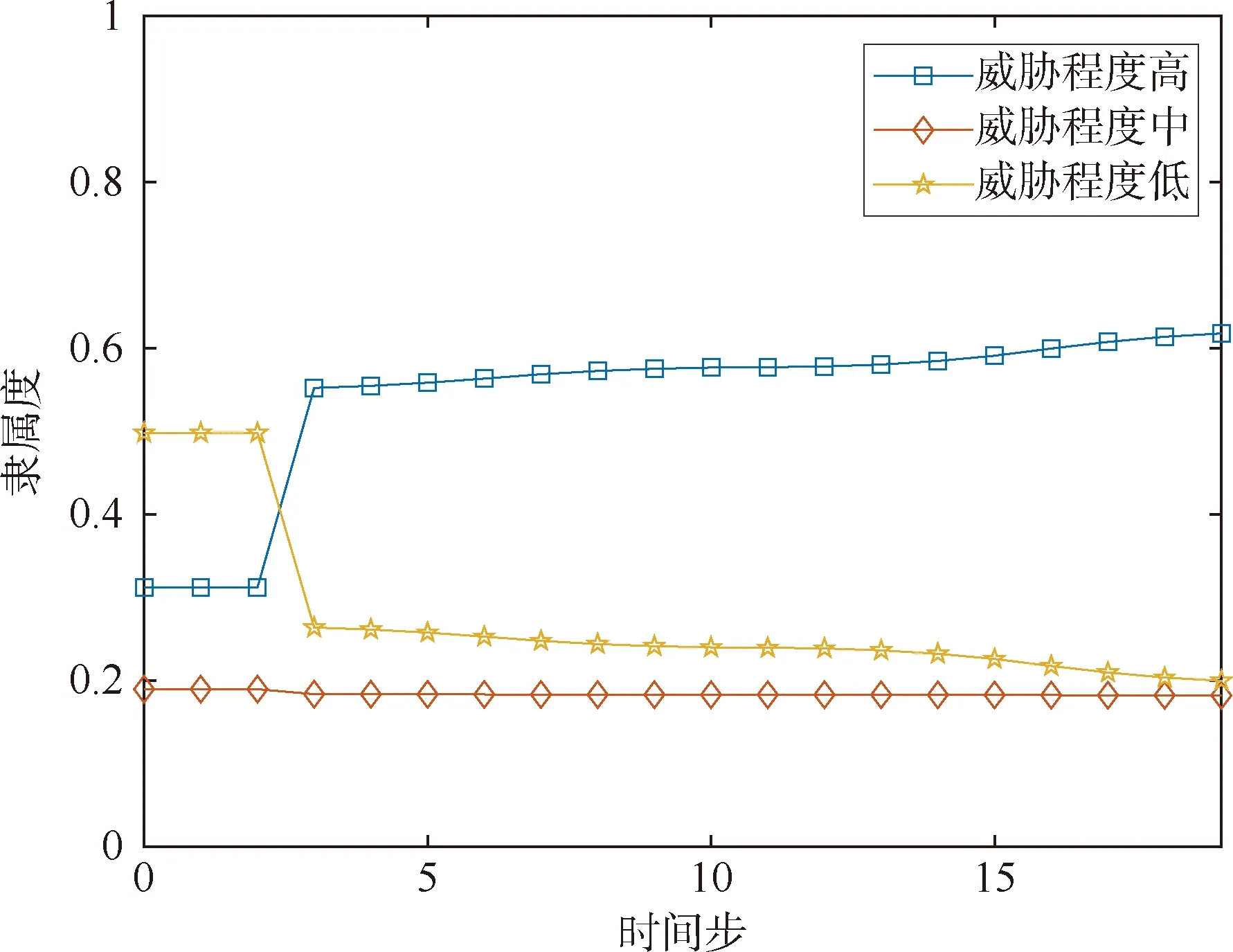
圖14 場景二威脅程度隸屬度變化趨勢
從圖中可以看出,空間目標異動行為威脅程度隨著相對距離的不斷縮短而逐漸增大。場景二第0步的威脅程度模糊表達為[0.3120,0.1898,0.4982];第3步時,隨著空間目標軌道階段由軌道保持狀態變為抵近狀態,空間目標的威脅度模糊集合變為[0.5523,0.1838,0.2639],其中“威脅程度高”的隸屬度從0.31提升至0.55,較大程度上反映出該目標行為的威脅程度。同時,在第3步到第23步的過程中,“威脅程度高”的隸屬度不斷提高,“威脅程度中”的變化較小,“威脅程度低”的隸屬度不斷降低。最終,在第23步時,威脅程度的模糊集合為[0.6192,0.1823,0.1985]。在整個抵近碰撞過程中,面對空間非合作目標的突發異動行為,威脅程度指標能夠及時展現異常變化,可為威脅規避決策提供重要預警信號。同時,在空間目標逐漸接近的過程中,指標表現穩健,變化趨勢符合專家認知的威脅趨勢,可以較好地反映空間目標異動行為的威脅情況。
5 結論
提出了一種基于離散模糊貝葉斯網絡的空間目標威脅評估模型,并對抵近繞飛和碰撞2種典型空間威脅場景進行仿真。實驗結果表明,該模型在2種場景下對空間目標的威脅度刻畫準確,能反映不同時間狀態的目標實時威脅程度,可以為后續軌道威脅規避決策提供數據支撐,具有較強的實際意義。