基于無人機的炮位偵校雷達目標模擬技術
2023-09-05 01:37:10王昕宇
艦船電子對抗 2023年4期
王昕宇
(南京海清科技有限公司,江蘇 南京 210036)
0 引 言
炮位偵校雷達是現代陸軍重要的戰場情報偵察設備,在確定敵方炮位陣地及校正我方炮彈落點精度等方面發揮著重要的作用。隨著雷達技術的廣泛使用[1],炮位偵校雷達在研制、生產、維護和日常訓練中,均需采用雷達目標模擬器進行性能測試、故障診斷和操作員訓練,傳統的做法是在外場架設目標模擬陣列[2],通過控制目標回波信號的延時和多普勒[3]以及陣列天線的輻射順序,來模擬目標的運動軌跡。受空間位置的限制,該模擬器只能模擬單目標的飛行軌跡,難以實現同時多批次目標的模擬能力。隨著無人機技術的發展,以及無人機高精度和快響應控制能力的大幅提升,將無人機應用到雷達目標模擬上來已成為可能,由無人機搭載小型雷達目標模擬器,通過控制無人機在空中按照一定航跡運動,模擬彈丸方位角和俯仰角的變化,結合模擬器對接收雷達信號的調制轉發,可以實現高逼真的彈道軌跡模擬[4]。
1 工作原理
無人機載目標模擬器電路組成框圖如圖1所示。模擬器工作時,接收天線接收雷達發射信號,經過變頻模塊下變頻為中頻信號,目標板根據設定的工作參數對輸入中頻信號經過采樣和存儲,經距離延時和多普勒調制后,由D/A恢復為模擬中頻信號,經上變頻和幅度調制后注入或空饋給雷達接收機。無人機載雷達目標模擬器電路組成框圖如圖1所示。
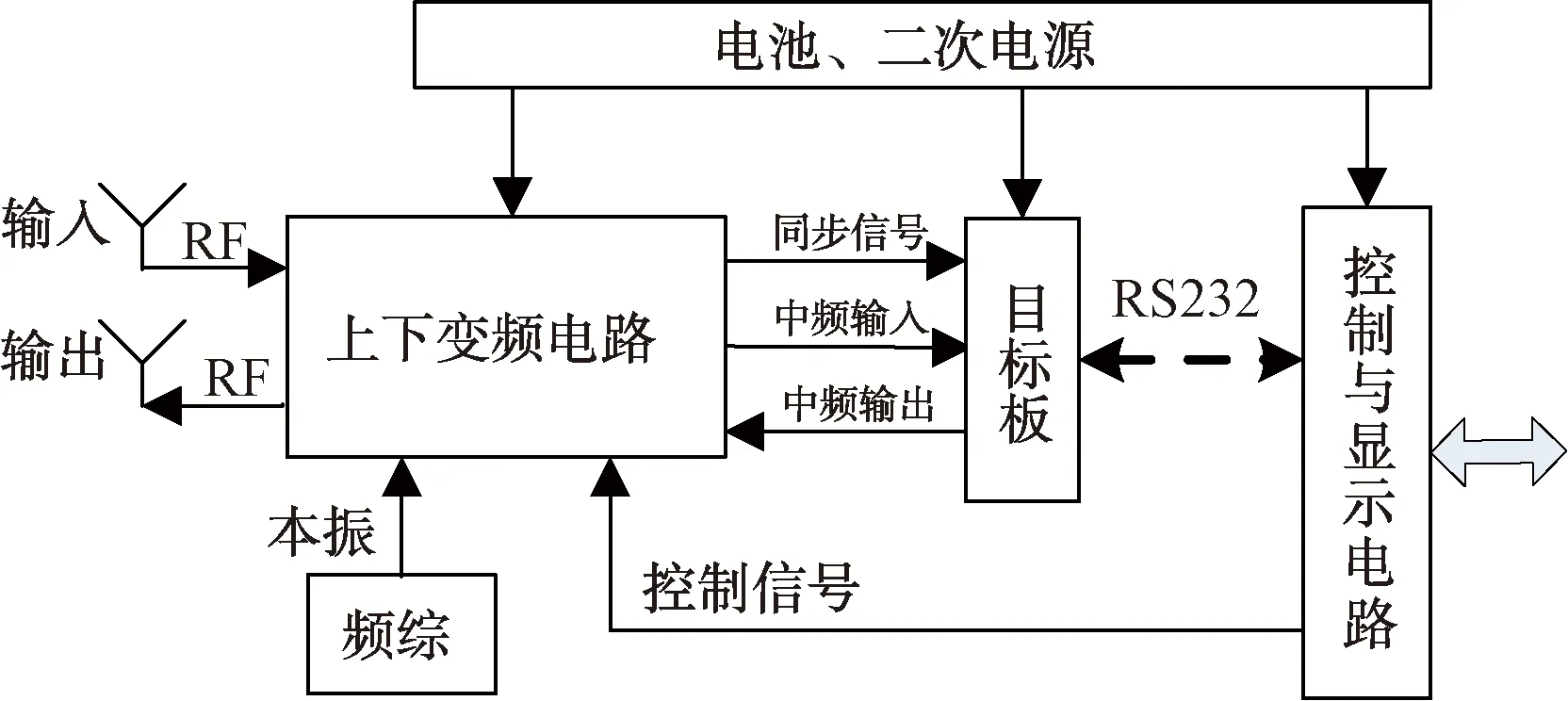
圖1 無人機載雷達目標模擬器電路框圖
本文重點研究基于無人機的炮彈目標逼真模擬技術,彈丸的距離、速度和雷達截面積(RCS)由目標模擬電路完成,而空間位置變化需要精確控制無人機來實現。無人機載目標模擬器可以模擬各種炮彈的運動軌跡。以典型的榴彈炮為例,假設炮彈初速度為1 000 m/s,最大射程為50 km,彈道仰角范圍為6°,雷達波束寬度為2.5°,測角精度為0.25°,精確模擬一次彈道軌跡需要控制無人機位置變化大于48次。如果一次彈道飛行時間50 s,那么就要求無人機一次位置變化的控制時間小于1 s,這樣就對無人機控制系統提出了挑戰。
2 無人機控制電路設計
2.1 經典PID控制技術
典型的無人機飛行控制框圖如圖2所示,主要包括位置控制器和姿態控制器,姿態控制保證無人機空中飛行的穩定性,位置控制保證無人機自主跟隨的精度。整個控制器的輸入是期望的位置Pd(xd,yd,zd)和偏航角θd,輸出是期望總拉力fd和三軸力矩τd。位置控制器通過比較無人機實際位置p(x,y,z)與期望位置Pd(xd,yd,zd)的差值,根據控制算法計算出四旋翼無人機的期望總拉力fd和期望俯仰角βd以及滾轉角γd,姿態控制器通過比較實際姿態角(α,β,γ)與期望姿態角(αd,βd,γd)差值計算出力矩參數τd,然后總拉力和力矩輸入到控制分配器得到電機轉速,使得無人機到達期望的位置[5-6]。
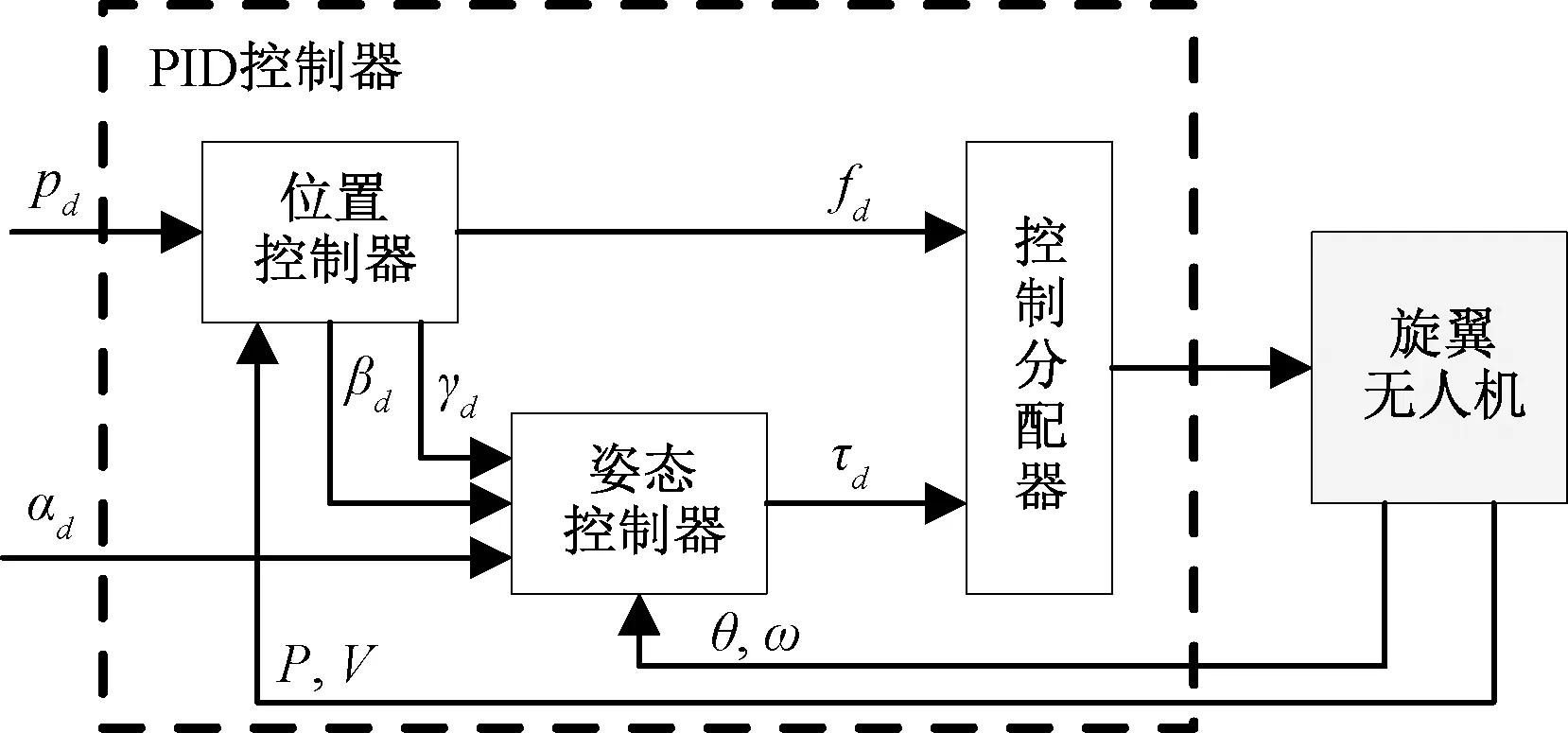
圖2 四旋翼無人機飛行控制圖
經典的比例、積分、微分(PID)控制器由比例環節、積分環節和微分環節組成。比例環節只考慮當前的偏差值,對系統偏差迅速做出反應;積分環節會考慮過去的偏差情況,對系統偏差進行積分,可以減少偏差的積累,提高對被控對象的控制精度;微分環節考慮近期偏差的變化情況,并預估控制對象將來的變化趨勢,以改善被控對象的動態性能指標[7-8]。
假設PID控制器的輸入期望值為r(t),實際輸出值為y(t),二者的差值e(t)為:
e(t)=r(t)-y(t)
(1)
PID控制規律的表達式如下:
Kd(e(n)-e(n-1))
(2)
式中:Kp、Ki、Kd分別為比例系數、積分系數和微分系數。
2.1.1 姿態控制器
姿態控制器采用串級PID控制策略[9],分為內外兩環控制,內環為角速度控制環,外環為角度控制環。角速度控制環的引入,可以提高無人機系統的魯棒性,改善系統的動態性能,同時對外環輸出的干擾起到有效的抑制作用。姿態控制器電路組成框圖如圖3所示。
(3)
式中:K1、K2、K3分別為橫滾、俯仰及偏航的環路控制系數,均大于0。
Kωd(eω(n)-eω(n-1))
(4)
式中:eω=ω-ωd;Kωp,Kωi,Kωd∈R。
實際姿態角與期望姿態角的差值經外環作用輸出期望的角速度,實際角速度和期望角速度的差值再經內環得到輸出力矩,傳遞給四旋翼無人機系統模型。
2.1.2 位置控制器
位置控制器電路框圖如圖4所示,同樣采用串級PID控制方法,內環為速度控制環,外環為位置控制環。位置控制器分為水平控制通道和高度控制通道,水平控制通道先求出實際水平位置與期望水平位置的差值,經外環輸出期望的水平方向速度Vhd,實際速度與期望速度的差值eVh再經內環得到期望的滾轉角βd和俯仰角γd,傳遞給姿態控制器。高度控制通道根據實際高度與期望高度的差值,通過外環輸出期望的高度方向速度Vzd,實際速度與期望速度的差值經內環得到期望的總拉力fd,傳遞給四旋翼無人機。
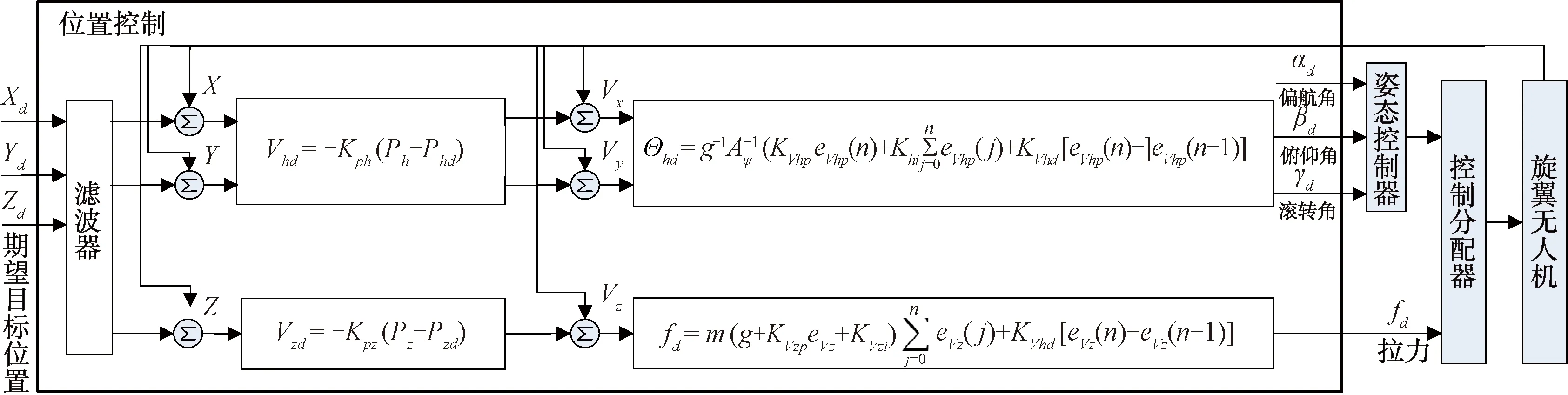
圖4 位置控制器電路框圖
控制器外環輸出的水平方向速度期望值Vhd和高度方向速度期望值Vzd如下:
Vhd=Kph(Phd-Ph)
(5)
Vzd=Kpz(Pzd-Pz)
(6)
水平方向實際速度與期望速度的差值eVh,以及高度方向實際速度與期望速度的差值eVz如下:
eVh=Vh-Vhd
(7)
eVz=Vz-Vzd
(8)
控制器內環輸出的水平方向期望姿態角度Θhd如下,包括滾轉角和俯仰角:
KVhd(eVh(n)-eVh(n-1))
(9)
期望的總拉力fd為:
KVhd(eVz(n)-eVz(n-1))
(10)
2.2 變論域模糊PID控制技術
變論域模糊PID控制技術對于時變和非線性系統具有很好的控制效果,能夠縮短穩定時間,提高抗干擾能力[10-12]。本文擬采用二維模糊控制器,控制器的輸入為誤差e和誤差變化率ec,輸出為PID控制器3個參數Kp、Ki、Kd的修正量。模糊PID控制器不斷獲取e和ec的數值,經過量化因子變換和模糊化接口處理,將輸入量轉換為模糊處理能夠識別的變量,模糊化推理機由專家經驗規則和智能算法組成,經模糊推理得到控制系統的調整參數,通過解模糊算法得到Kp、Ki、Kd的調整量,再與Kp、Ki、Kd的初始值相加得到最后的控制參數。變論域模糊PID控制電路框圖如圖5所示。該控制系統不僅動態響應特性得到改善,而且抗外界干擾能力也得到提高。
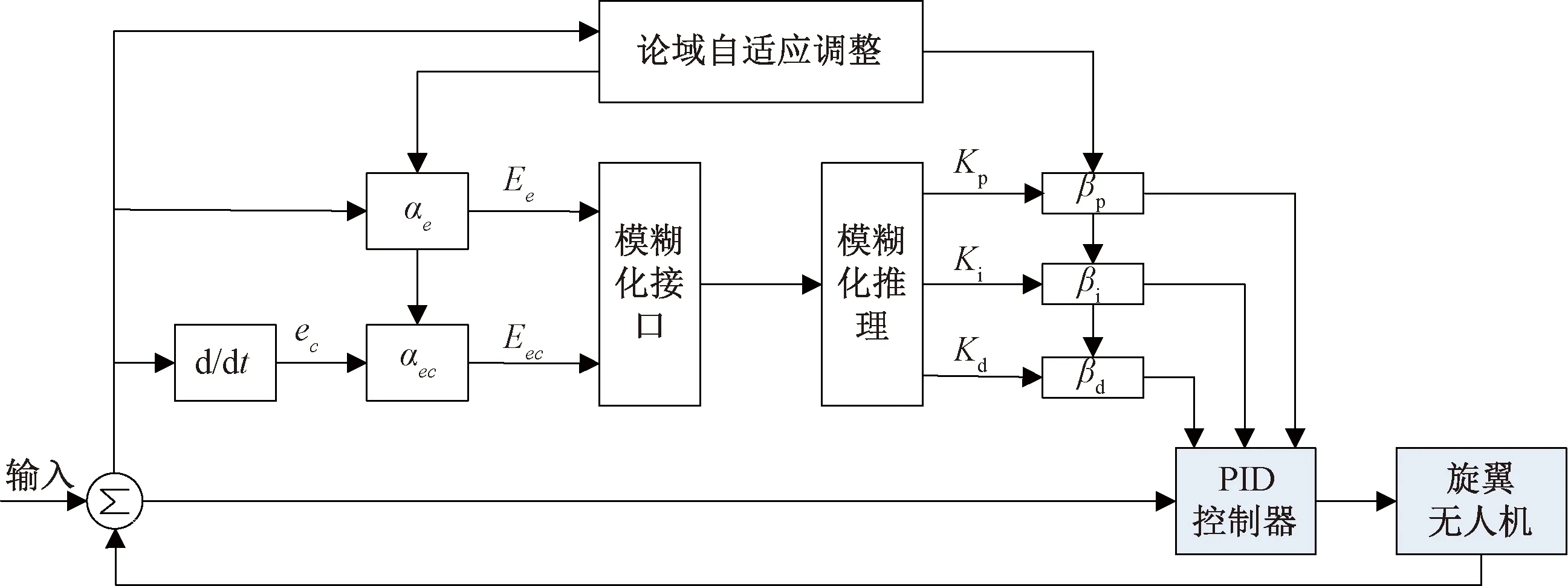
圖5 變論域模糊PID控制電路框圖
本文使用7個模糊變量,分別為負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB),模糊子集為{NB,NM,NS,ZO,PS,PM,PB},采用三角型隸屬函數來確定模糊子集,模糊PID控制器3個參數的調整原則如下:
(1) 當|e|較大時,為了系統可以達到快速跟蹤的效果,所以選擇較大的Kp;同時為了避免偏差變化率過大,需要抑制微分作用,防止其快速增加,選擇較小的Kd;為了防止產生積分飽和,出現過量的超調,一般取Ki為零。
(2) 當|e|和|ec|為中等大小時,為了避免超調較大,所以選擇較小的Kp,也可以選擇較小的Ki;同時為了保證系統的快速響應,選擇適當的Kd。
(3) 當|e|較小時,為了系統可以達到良好的穩定控制效果,選擇較大的Kp和Ki;同時為了避免系統振蕩,提高抗干擾能力,在|ec|較小時可以選擇較大的Kd,|ec|較大時選擇較小的Kd。
對于模糊控制規則,需要相應的語句進行描述[13]。由e、ec、ΔKp、ΔKi、ΔKd構成的49條模糊規則用if-then語言格式進行表示,每一條語句都代表一個模糊關系。經模糊推理后得到的是模糊量,但輸出給控制對象的值必須是一個精確量,所以還需對結果進行解模糊。本文采用加權平均法作為解模糊方法。得到精確值后,還需與比例因子相乘得到實際的控制系統輸出值。
3 仿真分析
本文以四旋翼無人機為例,在MATLAB/Simulink中搭建飛行控制系統的仿真模型,將系統各部分進行模塊化處理,分別搭建串級PID控制模型、模糊PID控制模型和變論域模糊PID控制模型,進行仿真和分析。四旋翼無人機仿真參數如表1所示。
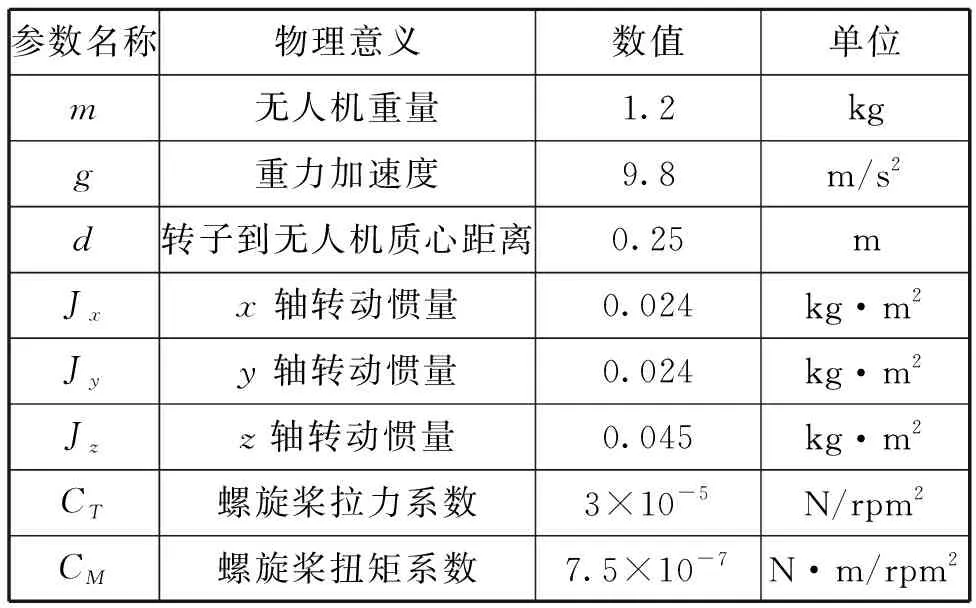
表1 四旋翼無人機模型參數
設系統初始位置為 (0,0,0),初始姿態角為 (0,0,0),仿真時終點位置為 (1,1,2),位置響應曲線如圖6~圖8所示。3種控制算法對應的上升時間、超調量、峰值時間和穩態時間如表2所示。
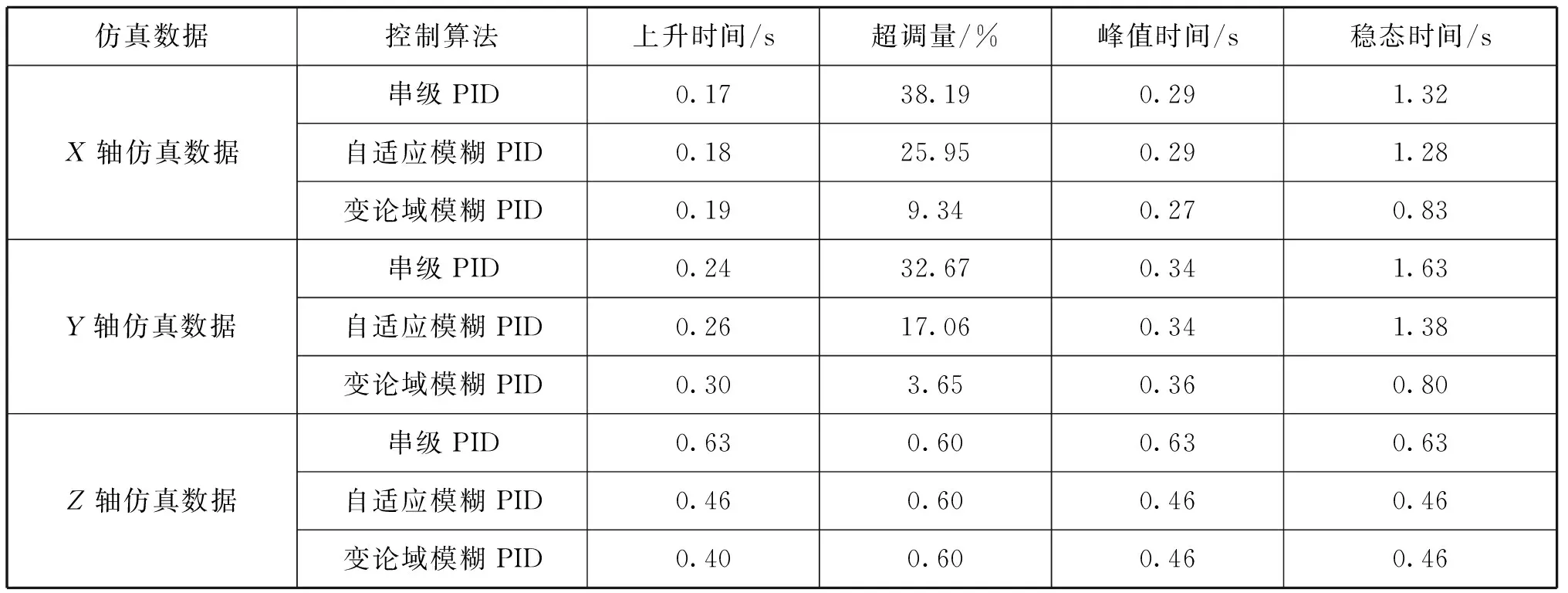
表2 四旋翼無人機仿真數據
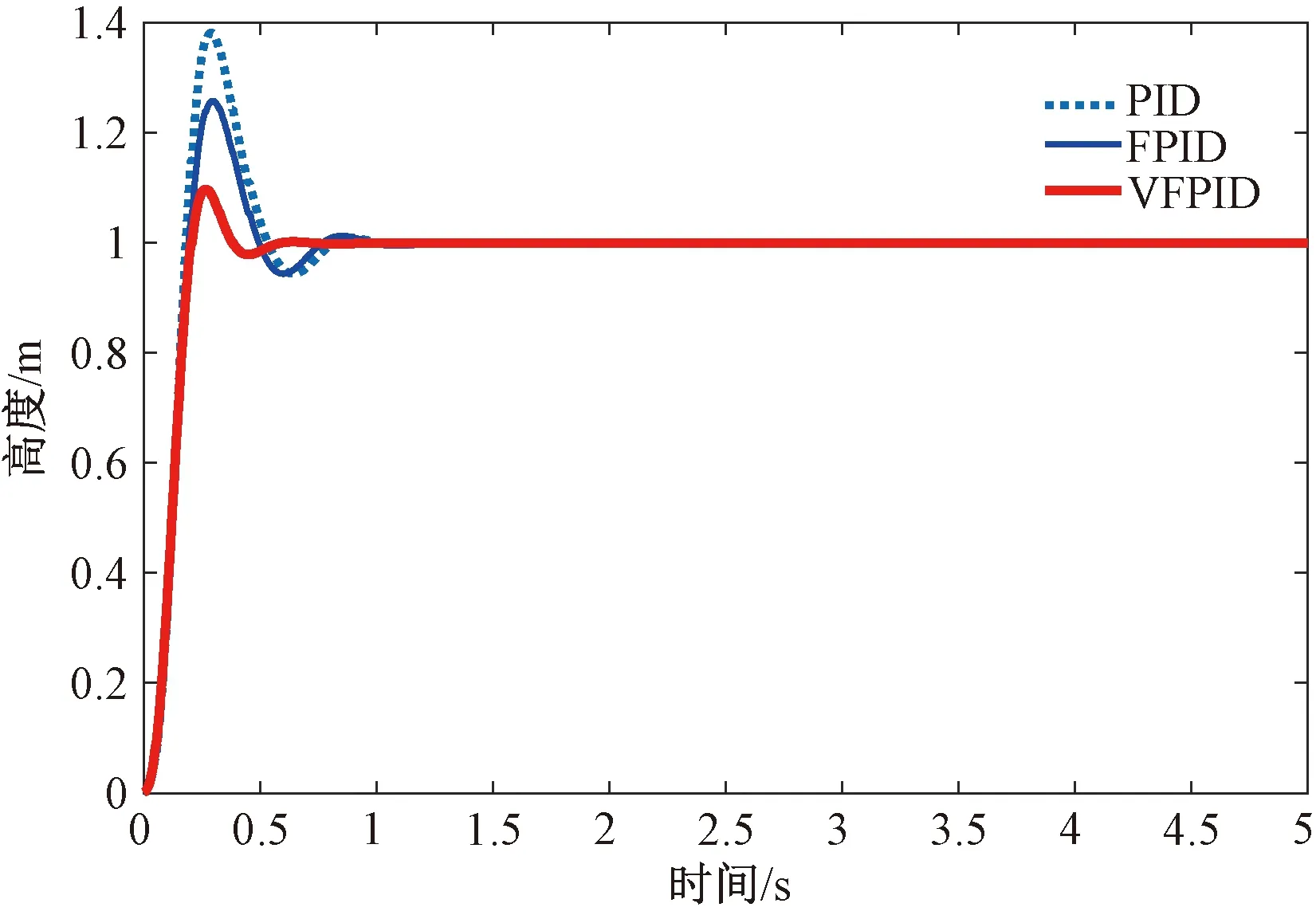
圖6 無人機X軸分量仿真結果

圖7 無人機Y軸分量仿真結果
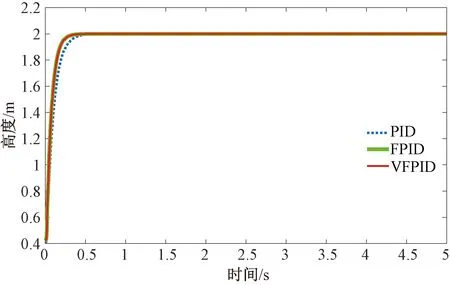
圖8 無人機Z軸分量仿真結果
通過比較表2的仿真數據可以看出,變論域自適應模糊PID控制算法具有上升時間短、超調量小、穩態時間短等優點,而且該控制算法具有很好的穩定性和魯棒性。如果在炮彈目標模擬器中采用該控制算法,無人機位置控制精度和控制速率均能滿足要求。
4 結束語
針對陣列式炮位偵校雷達目標模擬器存在的問題,本文研究了基于無人機的雷達目標模擬器。小型雷達目標模擬電路可以安裝在無人機上,接收的雷達輻射信號經過延時、多普勒和幅度調制,可模擬目標的距離和速度信息,目標的角度變化是通過獲取目標的期望位置、控制無人機姿態使其朝著期望位置運動。為了精確模擬彈丸目標的運動軌跡,滿足雷達測量需求,無人機控制系統的選擇和控制參數的設計是模擬器的關鍵,要求無人機控制環路響應速度快、振蕩幅度小、抗干擾能力強。本文研究了無人機控制系統的原理和算法,提出了基于變論域模糊PID控制技術,并與常規串級PID控制算法和模糊PID控制算法進行了對比,變論域模糊PID算法收斂速度更快,穩定性更好,超調量更小,能夠大幅提高無人機的位置跟蹤效果。同時,本文針對四旋翼無人機進行了建模仿真,仿真結果表明變論域模糊PID的控制算法不僅控制速度快,而且具有很好的魯棒性和抗擾性。
