網聯車環境下動態信號交叉口通行能力分析
2023-09-08 01:45:00徐菡林兆豐高佩佩吳亞慶
中國水運 2023年8期
徐菡,林兆豐,高佩佩,吳亞慶
(山東建筑大學交通工程學院,山東 濟南 250101)
隨著車聯網與自動駕駛技術不斷完善,不同智能化等級、不同占比的智能車輛參與到城市交通,尤其在與人工駕駛車輛混行的條件下,交通環境會變得更加復雜。目前人工駕駛情境下的交叉口通行能力的相關研究較為完備,智能網聯環境下在交叉口方面的研究更加傾向于區域內自適應控制[1-2]、車速引導[3]以及各類傳感器等技術方面,關于網聯車背景下通行能力的研究更傾向于路段或路網[4],而在交叉口通行能力方面的研究相對較少。
本文首先分析了網聯車背景下信號交叉口控制原理,基于此分析了受動態信號控制時交叉口通行能力的計算方法,提出了一種基于最小延誤模型與交叉口實際車流量確定最大綠燈時間的方法,并給出了相應的求解算法,結合道路寬度、行人步行時間以及車流量確定最小綠燈時間,最后根據現場調查數據對仿真建模中的相關參數進行標定后進行仿真,并對動態信號交叉口的通行能力進行分析。研究結果能夠為網聯車背景下的道路交叉口相關交通參數設計提供理論指導,有利于加強對道路的規劃、設計與管理。
1 控制原理
1.1 網聯車控制原理
網聯車控制原理結構圖如圖1 所示,分別為智能云端、路側感知設備以及智能車載設備三個模塊,智能云端在整個體系中充當了大腦的作用,主要通過對車流量和交通環境數據進行分析和處理,并結合信號控制交叉口優化控制模型及相關算法對為車輛制定相應的控制策略。智能車載設備能夠實時獲取流量、速度、位置、天氣和道路環境等信息,同時將信息傳遞給路側感知設備,路測設備再將信息進行初步處理后傳遞到智能云端,智能云端通過對相關信息與數據進行分析與優化,為交通信號控制參數的調整提供可靠的數據支持。
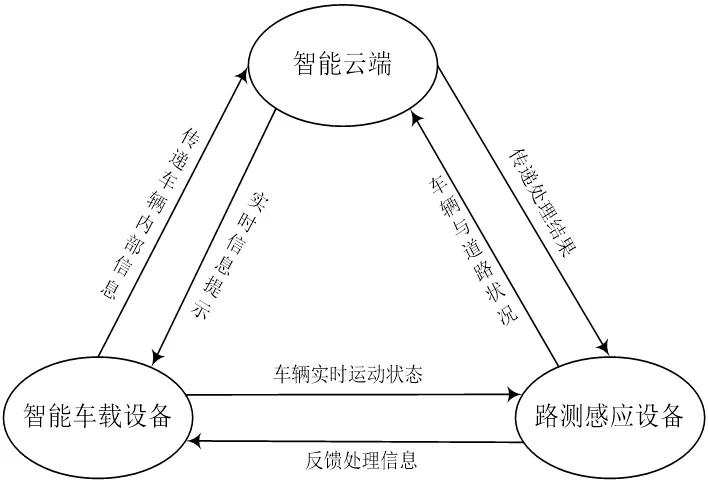
圖1 控制系統結構
1.2 動態信號控制原理
在動態信號控制中,實際的綠燈延長時間等于激活本次單位綠燈時間開始到下次檢測到來車之間的時間,其中單位綠燈時間會有重疊的部分。原理如圖2 所示。
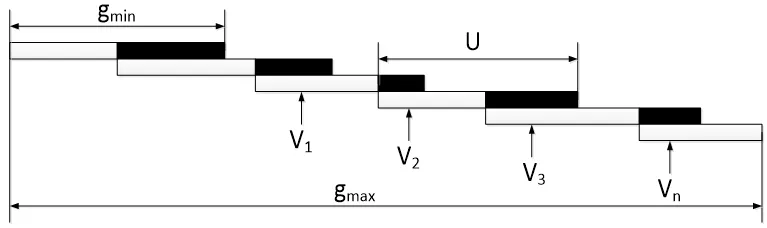
圖2 單位綠燈延時時間工作原理
通過對圖2 分析可知該相位內有效綠燈總時間為每個相位綠燈延長時間U 減去各自重疊的綠燈時間Vi的總和,相位內有效綠燈總時間可表示為:
式中:Vi為各個單位綠燈延時之間重疊的時間,s;為平均重疊時間,s;n 為有效綠燈時間內到達的車輛數,輛(veh)。
動態信號配時條件下對交叉口通行能力相關參數進行計算時,通常采用有效綠燈時間與周期時長平均值進行計算。動態交通分配中交叉口通行能力可以由下式決定:
式中:Si為車道i 的飽和流率,veh/h。
2 參數優化與估計模型
最大綠燈時間與最小綠燈時間共同決定了綠燈延長時間,最小綠燈時間的設置會影響交叉口是否滿足通行需求,同時也是保障通行公平性的重要前提,最大綠燈時間設置過大或過小都會影響交叉口的服務水平。
2.1 最小綠燈時間
通常情況下,最小綠燈時間需保證停靠在停車線和檢測器之間的所有車輛都可以安全駛出停車線,還要保證行人、非機動車能夠安全通過。因此,在本文中利用初始時間與行人過街時間對最小綠燈時間進行確定。初始時間[5]取決于排隊車輛、平均車頭時距和開始的延遲時間:
式中:h 為平均車頭時距,s;n 為停車線與檢測器間的車輛數目;K1為開始的延遲時間,s。
當交叉口流量較少時,初始時間可能并不能保證行人安全過街,為確保行人能夠通過交叉口,所以每個相位的綠燈時間必須大于行人安全過街的最短時間,行人過街時間由人行橫道與行人步行速度確定:
式中:di為人行橫道寬度,m;V1為第15 百分位行人步行速度,一般為1.5m/s;Ii為綠燈間隔時間,一般取5s。對于車道數較多的交叉口,可以考慮設置2 次過街。所以最小綠燈時間:
2.2 最大綠燈時間
2.2.1 模型建立
通過對交叉口延誤模型的分析與比較,采用Webster 延誤模型[6]在較高飽和度時的計算公式對動態信號配時的最大綠燈時間與周期時長進行優化。模型建立如下:
2.2.2 模型求解
針對提出模型的基本形式,選擇Frank-Wolfe 算法[7]對模型進行求解。Frank-Wolfe 是求解線性約束問題的一種算法,其基本形式為
式中:A 是m×n 矩陣,秩為m,b 是m 維列向量,f(x)可行域記為:。
使用MATLAB對提出的模型編寫代碼并進行求解,求解過程為:
(1)給定初始可行點x(1),允許誤差,令k=1;
(2)求解線性規劃問題,得到最優解y(k);
(4)從x(k)出發,沿方向x(k)—x(k)在連接x(k)和x(k)的線段上搜索,得到;
3 仿真分析
3.1 搭建仿真環境
選取德州市某交叉口作為研究場景,仿真場景分為靜態場景與動態場景。
3.1.1 靜態場景
經現場調查與測量,路口每個方向上均為3 個入口和2 個出口,進口道寬度為3.2m。處理后得到該交叉口的大致布局分布見圖3。

圖3 研究場景布局示意圖
3.1.2 動態場景
該交叉口信號相位為典型的對稱放行四相位交叉口,右轉無限制,南北車流量較東西方向車流量大。收集該交叉口7:00-9:00 兩個小時的交通量,計數周期為5min 一次,通過對數據的整理與計算,該交叉口高峰小時為7:30-8:30,高峰小時各進口道車流量見表1。

表1 車流量(單位:veh/h)
在對最大綠燈時間進行求解時,選取15min 內最大交通量作為高峰小時流量計算交叉口飽和度,按照表1所示的相位單側高峰小時交通量分別為972veh/h、292 veh/h、1408 veh/h、1040 veh/h。求解后求得各個相位的最大綠燈時間分別為25s、20s、48s、26s。
3.2 通行能力分析
基于微觀仿真軟件進行標定,搭建網聯車行駛狀態下的模擬場景,通過仿真可以獲得每個相位的平均有效綠燈時間與平均周期時長,仿真結果如表2 所示。
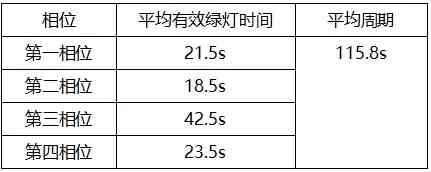
表2 仿真結果
根據公式(3)計算可以獲得該交叉口在使用動態信號控制時的實際通行能力為3295veh/h。當交叉口流量增大時,會使有效綠燈時間傾向于固定值,此時采用動態信號控制并不能獲得理想的效益。
4 結論
本文首先分析了網聯車背景下信號交叉口控制原理,基于此分析了受動態信號控制時交叉口通行能力的計算方法,然后提出了確定最大綠燈時間與最小綠燈時間的方法,最后根據現場調查數據對仿真建模中的相關參數進行標定后進行仿真,經實例測試,提出的模型和方法是有效可行的。
本文提出的方法僅在交叉口流量不大時才會有顯著效果,當交叉口流量較大時,動態信號配時會傾向于固定配時,在網聯車環境下使更為靈活的控制方法成為可能,在下一步的研究中,將會對更為復雜的控制方法下的交叉口通行能力進行深入探究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03