扇吸式生物光防治燈流場分析及結(jié)構(gòu)優(yōu)化*
2023-09-11 09:30:10石煒張曉瑩張國英
中國農(nóng)機(jī)化學(xué)報(bào) 2023年8期
關(guān)鍵詞:生物
石煒,張曉瑩,張國英
(1. 內(nèi)蒙古科技大學(xué)機(jī)械工程學(xué)院,內(nèi)蒙古包頭,014010;2. 內(nèi)蒙古中農(nóng)高科科技有限公司,內(nèi)蒙古鄂爾多斯,017010)
0 引言
伴隨著綠色生態(tài)農(nóng)業(yè)的提出,人們對(duì)于瓜果蔬菜質(zhì)量的要求也是越來越高,病蟲害的防治是其中的一個(gè)重要步驟。通過持續(xù)不斷的摸索,在綠色發(fā)展觀念深入人心的同時(shí)綠色防控的技術(shù)得到了完善[1-2]。農(nóng)業(yè)農(nóng)村部印發(fā)《關(guān)于加快發(fā)展農(nóng)業(yè)社會(huì)化服務(wù)的指導(dǎo)意見》提出推動(dòng)服務(wù)與科技深度融合,引導(dǎo)服務(wù)主體充分利用大數(shù)據(jù)、人工智能和其他信息技術(shù)使改善信息和農(nóng)業(yè)智能成為可能[3]。目前,害蟲的控制主要依靠殺蟲劑的使用,這將使害蟲對(duì)藥物產(chǎn)生抗藥性,還會(huì)造成會(huì)食用者的傷害。
何超等[4]對(duì)扇吸式殺蟲燈與頻振式殺蟲的殺蟲效果比較得出,扇吸式殺蟲燈的殺蟲效果明顯高于頻振式殺蟲燈,現(xiàn)有的實(shí)驗(yàn)結(jié)果表明[5-8],經(jīng)過兩天的昆蟲采集,有益昆蟲在扇吸式殺蟲燈中的存活率超過80%,所有害蟲都被殺死,而頻振式殺蟲燈中只有少數(shù)有益昆蟲存活。現(xiàn)使用的扇吸式生物光防治燈通過生物光將害蟲引誘到燈口后,有大部分害蟲會(huì)吸附在燈口附近,不能進(jìn)入集蟲瓶內(nèi)部,從而出現(xiàn)扇吸式生物光防治燈對(duì)害蟲吸入效率低的問題。
本文首先分析現(xiàn)有的扇吸式生物光防治燈集蟲瓶,基于流體力學(xué)相關(guān)理論知識(shí),以Fluent數(shù)值模擬軟件[9]為平臺(tái)進(jìn)行流體力學(xué)分析,模擬集蟲瓶內(nèi)部流場現(xiàn)狀,觀察內(nèi)部氣流軌跡是否穩(wěn)定。改變原有結(jié)構(gòu),提出進(jìn)風(fēng)口角度為進(jìn)風(fēng)口無擋板、進(jìn)風(fēng)口傾角為0°、15°、30°、45°、60°、75°的7種方案。然后將改進(jìn)結(jié)構(gòu)模型導(dǎo)入Fluent軟件中利用Mesh模塊對(duì)集蟲瓶管道模型進(jìn)行網(wǎng)格劃分,選擇合理的RNGk-ε湍流模型,設(shè)置求解參數(shù)。以集蟲瓶內(nèi)部流場跡線的均勻性為目標(biāo),對(duì)扇吸式生物光防治燈的原始進(jìn)風(fēng)口90°的結(jié)構(gòu)與進(jìn)風(fēng)口無擋板、進(jìn)風(fēng)口傾角為0°、15°、30°、45°、60°、75°的7種優(yōu)化方案設(shè)計(jì)的結(jié)構(gòu)在吸入風(fēng)扇1 600 r/min、1 800 r/min、2 000 r/min轉(zhuǎn)速的情況下進(jìn)行速度、壓力、蟲子跡線的對(duì)比,以此得到扇吸式生物光防治燈對(duì)蟲子吸入效率最高的設(shè)計(jì)方案。
1 扇吸式生物光防治燈集蟲瓶內(nèi)部流場分析
1.1 基本方程
本研究中扇吸式生物光防治燈集蟲瓶內(nèi)部的流體為空氣,而空氣、水等流體都屬于牛頓流體型流體,屬于黏性為定值的不可壓縮流體[10],故假設(shè)空氣的黏性不隨通風(fēng)管道里旋轉(zhuǎn)時(shí)溫度的改變而改變。當(dāng)空氣在集蟲瓶中流動(dòng)時(shí),流體中各質(zhì)點(diǎn)流動(dòng)具有不規(guī)則性,除了沿平行于通風(fēng)管道軸向運(yùn)動(dòng)外,還有垂直于管道軸向方向的橫向運(yùn)動(dòng),完全處于無規(guī)則的亂流狀態(tài)[11]。
流體在流動(dòng)過程中要受物理守恒定律的支配,基本守恒規(guī)律一般包括動(dòng)量守恒定律、質(zhì)量守恒定律、能量守恒定律。在扇吸式生物光防治燈集蟲瓶內(nèi)部流場的三維數(shù)值模擬過程中,不考慮能量的變化,所以能量方程不包含在流動(dòng)控制方程中[12]。
1) 質(zhì)量守恒方程。質(zhì)量守恒方程[13]由質(zhì)量守恒定律確定,也稱為連續(xù)性方程。該定律解釋如下:單位時(shí)間內(nèi)進(jìn)入流體微元體中的質(zhì)量等于在相同作用時(shí)間下流出流體微元體中的質(zhì)量。根據(jù)該定律,質(zhì)量守恒方程的微分形式表示如式(1)所示。
(1)
(2)
式中:ρ——流體密度;
t——時(shí)間;

u、v、w——速度矢量在x、y、z方向上的分量。
上述兩個(gè)方程代表了三維可壓縮流體在瞬態(tài)下的連續(xù)性方程。本文中的流體是不可壓縮的,它的密度不隨流動(dòng)而變化,它的密度是恒定的。
(3)
2) 動(dòng)量守恒方程。在流體流動(dòng)中,任何流體流動(dòng)系統(tǒng)都必須遵守動(dòng)量守恒定律[14],它被定義為微元流體在任何給定時(shí)間和作用在其上的任何力的動(dòng)量變化率的大小與外界作用在該微元體上的所有力的和是相等的,按照定律描述可以推導(dǎo)出x、y、z方向的動(dòng)量守恒方程,如式(4)~式(6)所示。
(4)
(5)
(6)
式中:p——流體微元體上的壓力;
μ——流體動(dòng)力黏度;
τxx、τxy、τxz——在分子黏度作用下作用于微元體表面上的黏性應(yīng)力τ的分量;
Fx、Fy、Fz——微元體方向作用上的體積力。
1.2 扇吸式生物光防治燈整體結(jié)構(gòu)及工作原理
1.2.1 整體結(jié)構(gòu)
以現(xiàn)場應(yīng)用的扇吸式生物光防治燈為基礎(chǔ),利用SolidWorks三維軟件等比例建模,燈體總高度為415 mm,采用型號(hào)為TT-1425的風(fēng)扇提供吸力,此風(fēng)扇的穩(wěn)定轉(zhuǎn)速為1 600 r/min,扇吸式生物光防治燈整體三維模型如圖1所示。
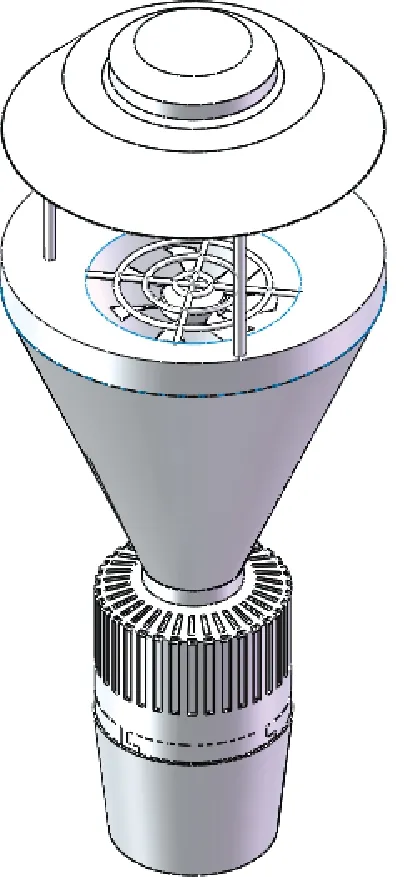
圖1 扇吸式生物光防治燈三維模型
1.2.2 工作原理
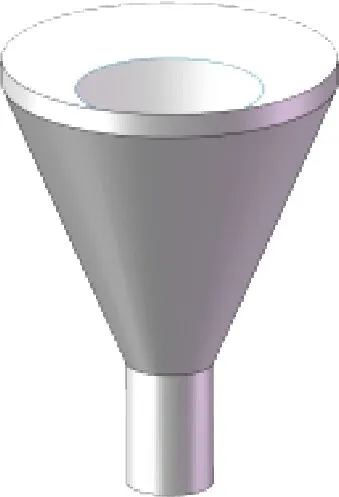
扇吸式生物光防治燈根據(jù)昆蟲的趨光特性通過燈光將害蟲引誘到集蟲瓶附近,啟動(dòng)電機(jī),使風(fēng)扇高速運(yùn)轉(zhuǎn)起來,風(fēng)扇產(chǎn)生高速的氣流將害蟲吸入集蟲瓶。當(dāng)蟲子被吸入集蟲瓶后,風(fēng)扇產(chǎn)生的氣流再將害蟲吹到集蟲瓶底部。在集蟲瓶的底部放入水,采用溺水的方式殺蟲。集蟲瓶底部的三維模型如圖2所示。在集蟲瓶下端設(shè)置柵欄,風(fēng)扇產(chǎn)生的氣流從此縫隙散發(fā)出去,經(jīng)實(shí)際測量,縫隙小于蟲子的實(shí)際大小,柵欄的三維模型及縫隙的局部放大圖如圖3所示。
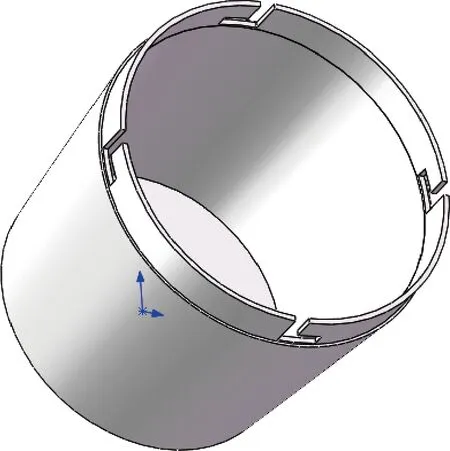
圖2 集蟲瓶底部三維模型
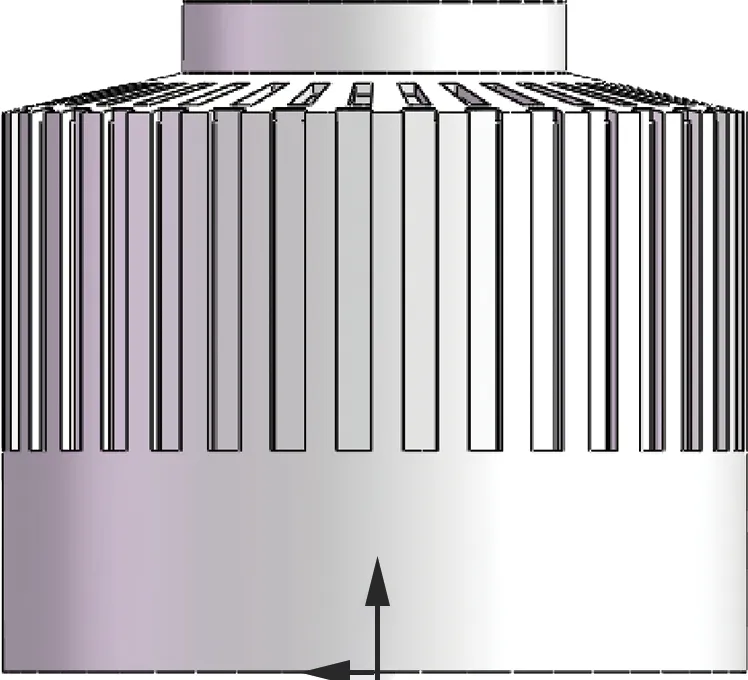
(a) 柵欄三維模型
1.3 幾何模型建立
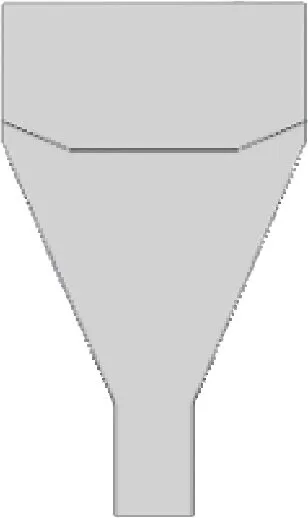
扇吸式生物光防治燈集蟲瓶出口直連大氣,進(jìn)風(fēng)口高度為100 mm,集蟲瓶的高度為220 mm,集蟲瓶的入口直徑為250 mm,集蟲瓶的出口直徑為66 mm。模型需要導(dǎo)入Fluent軟件中進(jìn)行數(shù)值模擬,扇吸式生物光防治燈集蟲瓶內(nèi)部進(jìn)風(fēng)口、旋轉(zhuǎn)流體區(qū)[15]、吸風(fēng)通道及出風(fēng)口的簡化模型[16]如圖4所示。
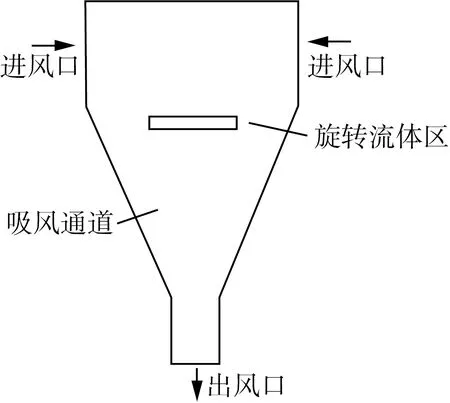
圖4 簡化模型
1.4 邊界條件及湍流模型
扇吸式生物光防治燈模型主要用到的邊界條件及物理意義如表1所示。
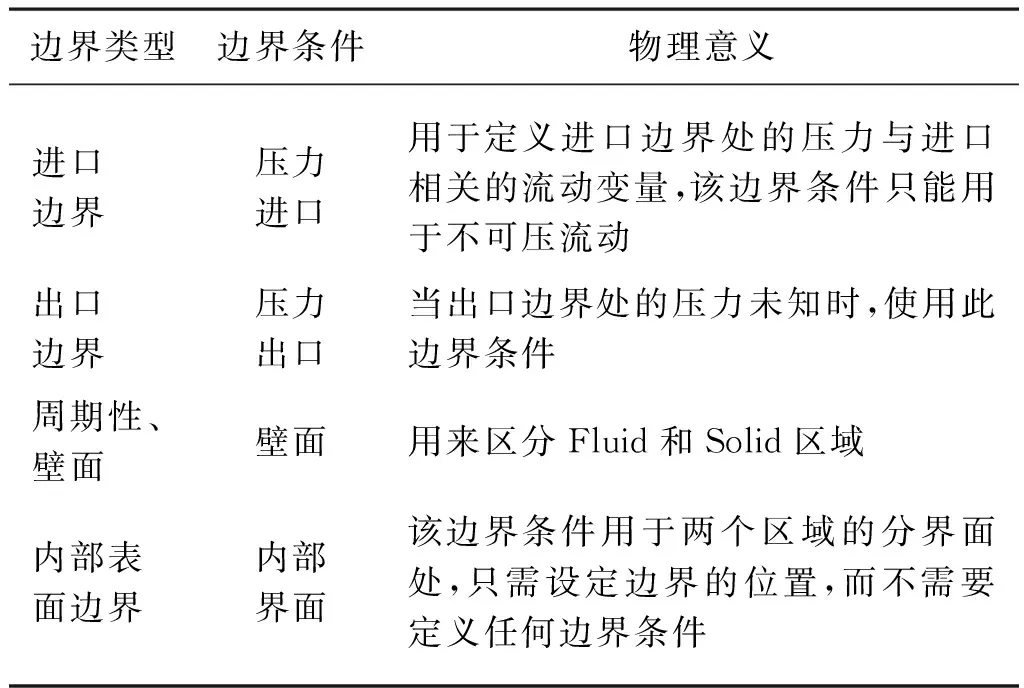
表1 扇吸式生物光防治燈邊界條件Tab. 1 Boundary conditions of fan suck-in bio-light control lamp
通過試驗(yàn)可發(fā)現(xiàn),當(dāng)湍流有強(qiáng)旋流或者帶有彎曲壁面流動(dòng)或者彎曲流線流動(dòng)時(shí),標(biāo)準(zhǔn)的k-ε兩方程模型會(huì)出現(xiàn)失真的現(xiàn)象。本文的模型需要考慮流動(dòng)中的旋轉(zhuǎn)及旋流流動(dòng)的影響,由于改進(jìn)后的RNGk-ε模型[17]對(duì)湍流黏度進(jìn)行了修正,所以使用改進(jìn)后的RNGk-ε模型,能夠更好地求解高應(yīng)變率及流線彎曲程度較大的流動(dòng),湍動(dòng)能k方程和湍流耗散率ε定義如式(7)、式(8)所示。
Gk+Gb-ρε-YM+Sk
(7)
(8)
式中:Gk——通過平均速度梯度產(chǎn)生湍動(dòng)能k;
Gb——由于浮力引起的湍流動(dòng)能k的產(chǎn)生項(xiàng);
YM——可壓縮湍流中脈動(dòng)膨脹的貢獻(xiàn);
μt——湍流黏性系數(shù);
Sk、Sε——用戶定義源項(xiàng);
C1ε、C2ε、C3ε——經(jīng)驗(yàn)常數(shù);
σk、σε——湍動(dòng)能k和耗散率ε對(duì)應(yīng)的湍流普朗特?cái)?shù)(Prandtl)。
取C1ε=1.44,C2ε=1.92,C3ε=0.09,湍動(dòng)能k與耗散率ε的湍流普朗特?cái)?shù)σk=1.0,σε=1.3[18]。
1.5 扇吸式生物光防治燈集蟲瓶內(nèi)部仿真結(jié)果
由于風(fēng)扇的穩(wěn)定轉(zhuǎn)速為1 600 r/min,此次對(duì)原扇吸式生物光防治燈集蟲瓶內(nèi)部流場的模擬仿真采用風(fēng)扇轉(zhuǎn)速為1 600 r/min,通過模擬仿真,對(duì)仿真結(jié)果進(jìn)行后處理,在后處理中用小球模擬蟲子,得到蟲子在扇吸式生物光防治燈集蟲瓶內(nèi)部的軌跡如圖5所示。
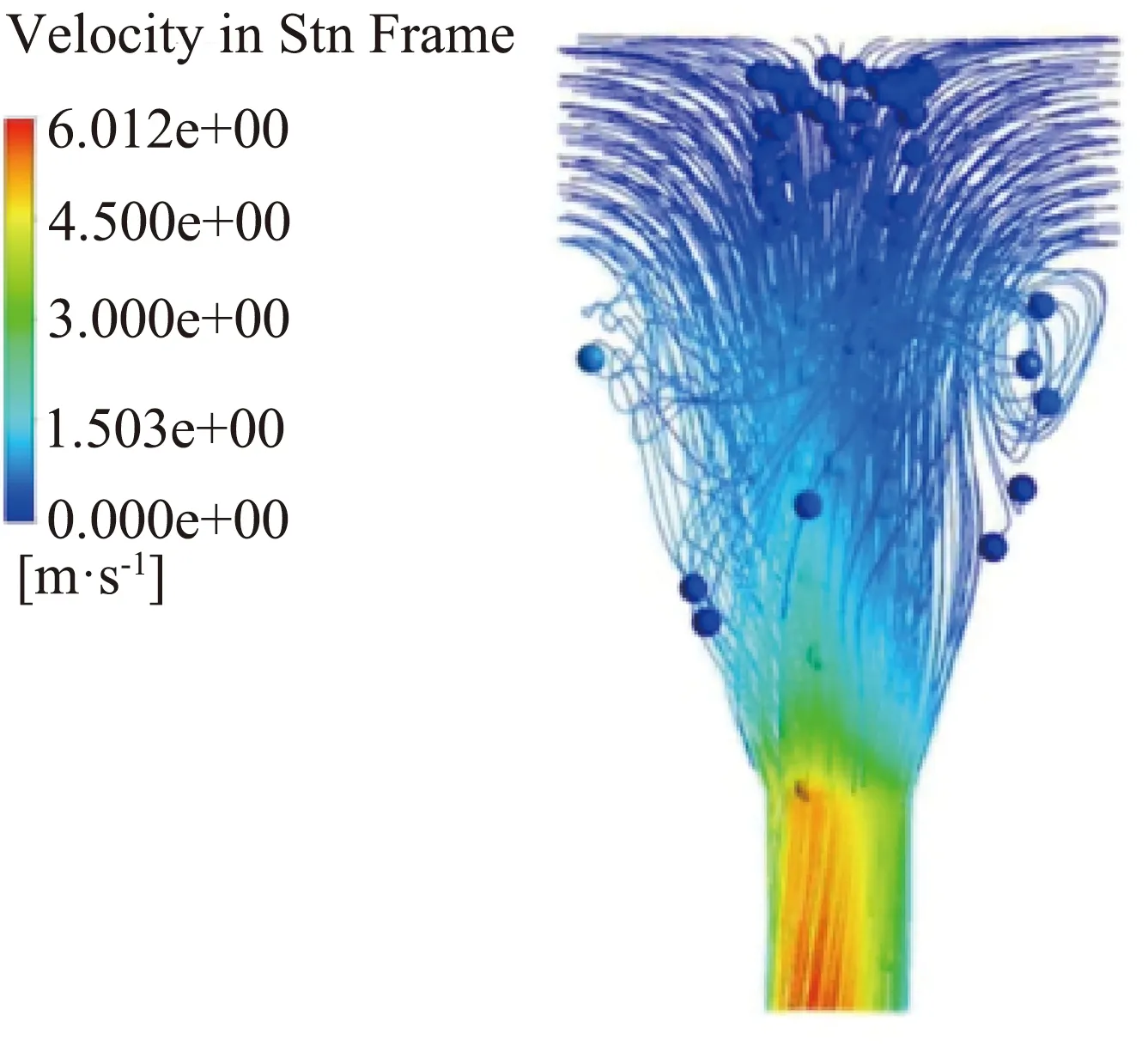
圖5 原扇吸式生物光防治燈集蟲瓶內(nèi)部蟲子軌跡
對(duì)圖5進(jìn)行分析,蟲子在被吸入扇吸式生物光防治燈集蟲瓶內(nèi)部后,在風(fēng)扇工況1 600 r/min條件下扇吸式生物光防治燈集蟲瓶內(nèi)部的蟲子軌跡紊亂,尤其在燈口位置會(huì)形成旋渦,一個(gè)原因是風(fēng)扇的工作轉(zhuǎn)速太小達(dá)不到蟲子被吸入集蟲瓶的最小速度,由于原扇吸式生物光防治燈集蟲瓶的進(jìn)風(fēng)口是垂直的,當(dāng)蟲子被吸引到集蟲瓶附近時(shí)會(huì)隨著風(fēng)扇產(chǎn)生的氣流而飛到集蟲瓶外部,另一個(gè)原因是扇吸式生物光防治燈集蟲瓶進(jìn)風(fēng)口的角度問題,造成蟲子在燈口的積聚。
2 扇吸式生物光防治燈集蟲瓶參數(shù)優(yōu)化研究
通過前面對(duì)原扇吸式生物光防治燈集蟲瓶的仿真研究,發(fā)現(xiàn)目前扇吸式生物光防治燈集蟲瓶結(jié)構(gòu)設(shè)計(jì)不合理,針對(duì)這一問題,將從兩個(gè)方面對(duì)目前扇吸式生物光防治燈進(jìn)行參數(shù)優(yōu)化,包括對(duì)風(fēng)扇工況的優(yōu)化、對(duì)扇吸式生物光防治燈集蟲瓶進(jìn)風(fēng)口角度的優(yōu)化。在合理的范圍內(nèi),將風(fēng)扇的轉(zhuǎn)速增大為1 800 r/min、2 000 r/min。
2.1 集蟲瓶進(jìn)風(fēng)口角度參數(shù)優(yōu)化
害蟲在扇吸式生物光防治燈聚集的位置圖如圖6所示,害蟲聚集的位置高度為20 mm。針對(duì)扇吸式生物光防治燈蟲子在燈口聚集的問題,進(jìn)風(fēng)口的位置是進(jìn)行優(yōu)化的位置。
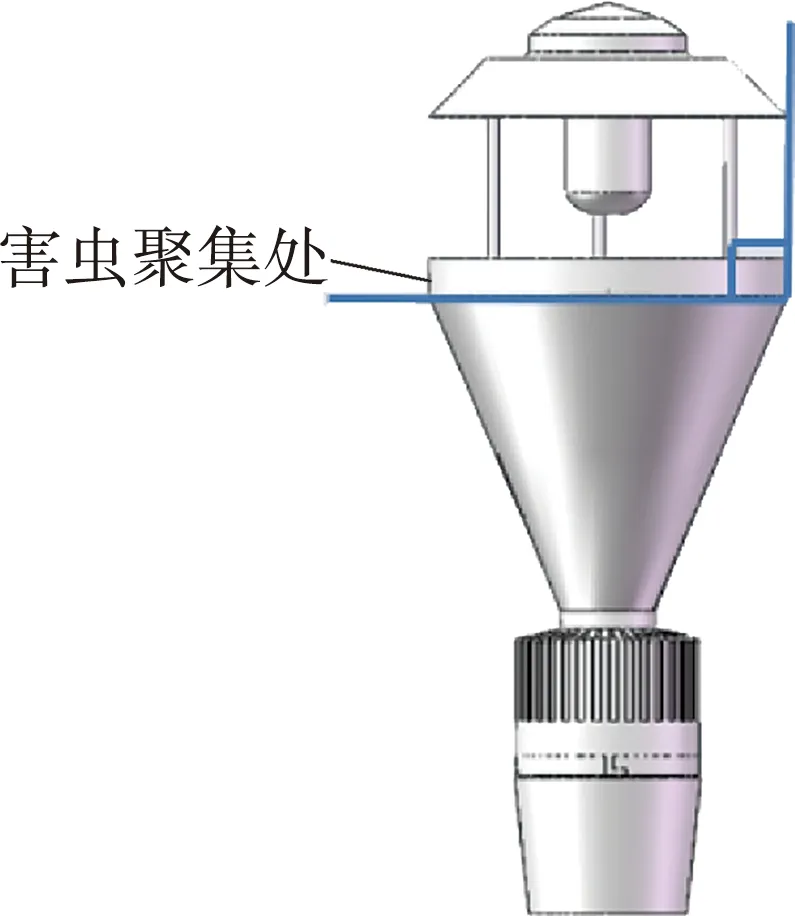
圖6 害蟲聚集位置及進(jìn)風(fēng)口角度
將入口處進(jìn)風(fēng)口進(jìn)風(fēng)方向與水平方向夾角定義為進(jìn)風(fēng)口傾角,原始的進(jìn)風(fēng)口形狀的傾角為90°,如圖6所示。考慮到使風(fēng)扇產(chǎn)生的氣流能夠擴(kuò)散到集蟲瓶的各個(gè)部位,以便減小出風(fēng)管道與出風(fēng)管道內(nèi)壁碰撞產(chǎn)生的能量損失和旋轉(zhuǎn)渦流。通過進(jìn)風(fēng)口角度的改變,達(dá)到集蟲瓶內(nèi)部穩(wěn)定的氣流及蟲子在集蟲瓶內(nèi)部運(yùn)動(dòng)穩(wěn)定的目的。
對(duì)扇吸式生物光防治燈進(jìn)風(fēng)口的優(yōu)化有7種,分別是進(jìn)風(fēng)口無擋板和進(jìn)風(fēng)口傾角為0°、15°、30°、45°、60°、75°的不同傾角條件,研究進(jìn)風(fēng)口傾角對(duì)蟲子吸入效果的影響。不同進(jìn)風(fēng)口角度變化工程圖如圖7所示。不同進(jìn)風(fēng)口角度變化二維圖如圖8所示。
(a) 原始90
(a) 原始90°
2.2 害蟲被吸入集蟲瓶速度與壓力計(jì)算
1) 害蟲被吸入集蟲瓶速度。害蟲在被集蟲瓶吸入的過程中,由于氣流或重力的影響,害蟲可以被吸進(jìn)集蟲瓶,其速度計(jì)算如式(9)所示。
(9)
式中:mmax——害蟲最大質(zhì)量,取0.001 kg;
Cd——阻力常數(shù),取0.6;
ρ空——空氣密度,取1.205 kg/m3;
Si——害蟲運(yùn)動(dòng)方向最大投影面積,取0.002 m2。
計(jì)算可得空氣的流速為3.6 m/s,即蟲子被吸入集蟲瓶的速度為3.6 m/s。
2) 害蟲被吸入集蟲瓶壓力。蟲子被吸入集蟲瓶的壓力計(jì)算如式(10)所示。
WP=0.5ρ空vt2
(10)
式中:WP——風(fēng)壓,kN/m2;
經(jīng)計(jì)算,蟲子被吸入集蟲瓶壓力為8.25 kN/m2。
3 扇吸式生物光防治燈的流體仿真模擬
3.1 壓力分析
3.1.1 風(fēng)扇工況1 600 r/min各個(gè)截面的壓力云圖
為了更好地展示出風(fēng)扇轉(zhuǎn)動(dòng)時(shí)集蟲瓶內(nèi)部的壓力變化[19],分別作了進(jìn)風(fēng)口、距離進(jìn)風(fēng)口0.5R、1.0R、1.5R、2.0R、2.5R(R表示流體區(qū)域的半徑)的截面。壓力是吸進(jìn)害蟲的關(guān)鍵因素,集蟲瓶不同角度進(jìn)風(fēng)口截面的壓力變化如圖9所示。原始進(jìn)風(fēng)口90°時(shí),在進(jìn)風(fēng)口截面與0.5R截面是負(fù)壓,在1.0R→1.5R→2.0R這三個(gè)截面的過程中出現(xiàn)一定程度的正壓,在集蟲瓶的內(nèi)部氣流中是不穩(wěn)定的,氣壓的不穩(wěn)定會(huì)導(dǎo)致氣流的不均勻,易產(chǎn)生紊亂的氣流。進(jìn)風(fēng)口無遮擋結(jié)構(gòu)的集蟲瓶內(nèi)部氣壓是基本穩(wěn)定的狀態(tài),氣壓比較穩(wěn)定。進(jìn)風(fēng)口75°時(shí)集蟲瓶內(nèi)部的壓力與其他角度集蟲瓶內(nèi)部的壓力相比,進(jìn)風(fēng)口75°時(shí)集蟲瓶內(nèi)部的壓力是比較穩(wěn)定的,氣流不易產(chǎn)生紊亂。綜合分析,在風(fēng)扇1 600 r/min工況進(jìn)風(fēng)口75°結(jié)構(gòu)是可以選擇的結(jié)構(gòu)。
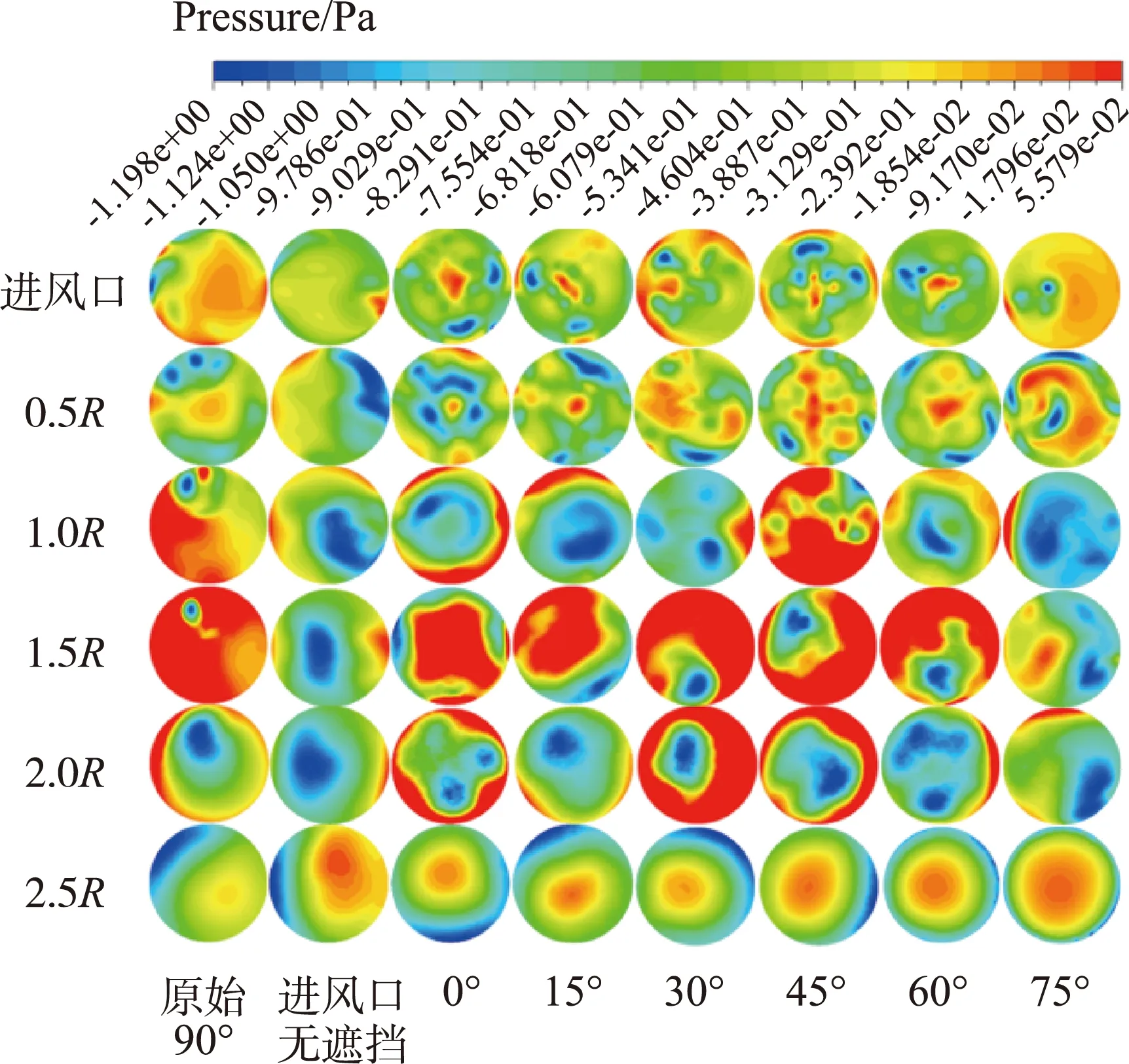
圖9 風(fēng)扇工況1 600 r/min條件不同角度進(jìn)風(fēng)口各截面壓力云圖
3.1.2 風(fēng)扇工況1 800 r/min各個(gè)截面的壓力云圖
風(fēng)扇工況1 800 r/min下,原始進(jìn)風(fēng)口90°各截面的壓力變化如圖10所示,7種進(jìn)風(fēng)口角度的各截面壓力變化如圖11所示。
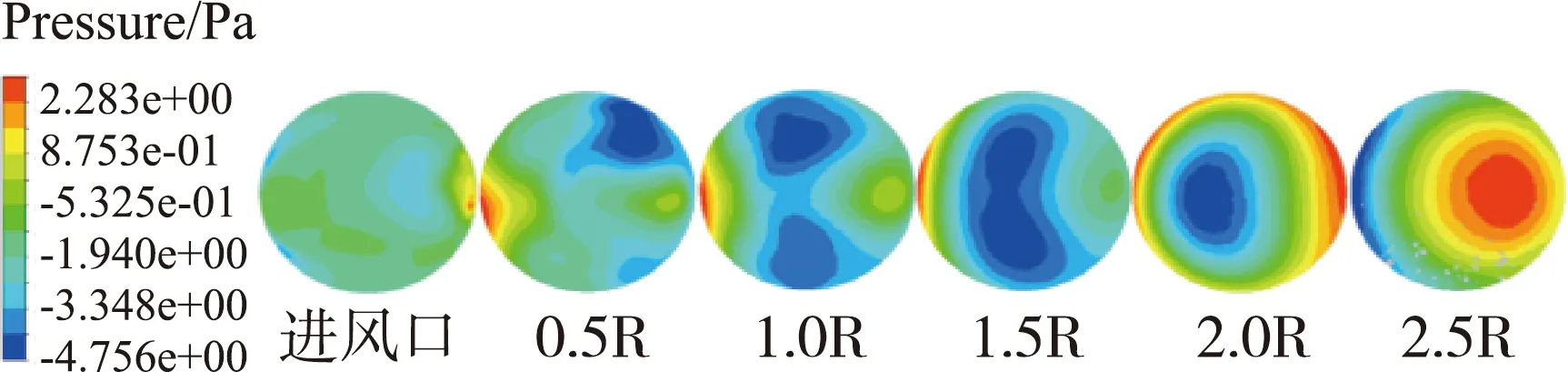
圖10 風(fēng)扇工況1 800 r/min條件進(jìn)風(fēng)口90°的各個(gè)截面的壓力云圖
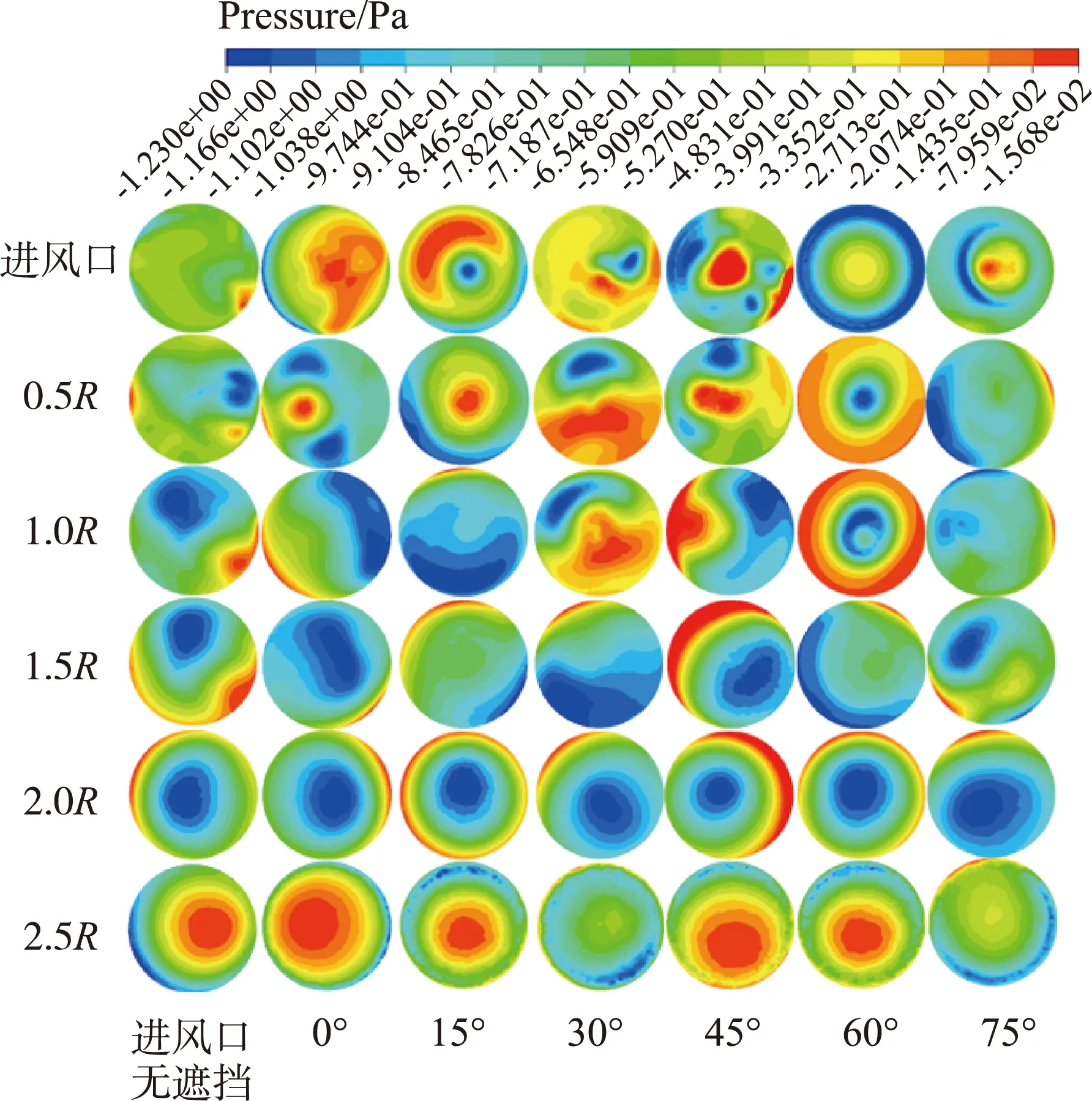
圖11 風(fēng)扇工況1 800 r/min條件不同角度進(jìn)風(fēng)口各截面壓力云圖
原始進(jìn)風(fēng)口為90°時(shí),各個(gè)截面壓力值有一部分為正數(shù),而負(fù)壓是吸進(jìn)害蟲的關(guān)鍵,所以這是導(dǎo)致害蟲不能被吸入的一個(gè)原因。進(jìn)風(fēng)口60°壓力云圖表現(xiàn)出比較平穩(wěn)的狀態(tài),各處壓力較均勻,因此進(jìn)風(fēng)口60°的結(jié)構(gòu)可以考慮采納。進(jìn)風(fēng)口75°時(shí),整體壓力是最小的,所以吸力是最小的,不能有效吸入害蟲。進(jìn)風(fēng)口45°時(shí),整體壓力大,但進(jìn)風(fēng)口60°的結(jié)構(gòu)壓力更平穩(wěn),適合穩(wěn)定作業(yè)。
3.1.3 風(fēng)扇工況2 000 r/min各個(gè)截面的壓力云圖
風(fēng)扇工況2 000 r/min下,集蟲瓶不同角度進(jìn)風(fēng)口截面的壓力變化如圖12所示。
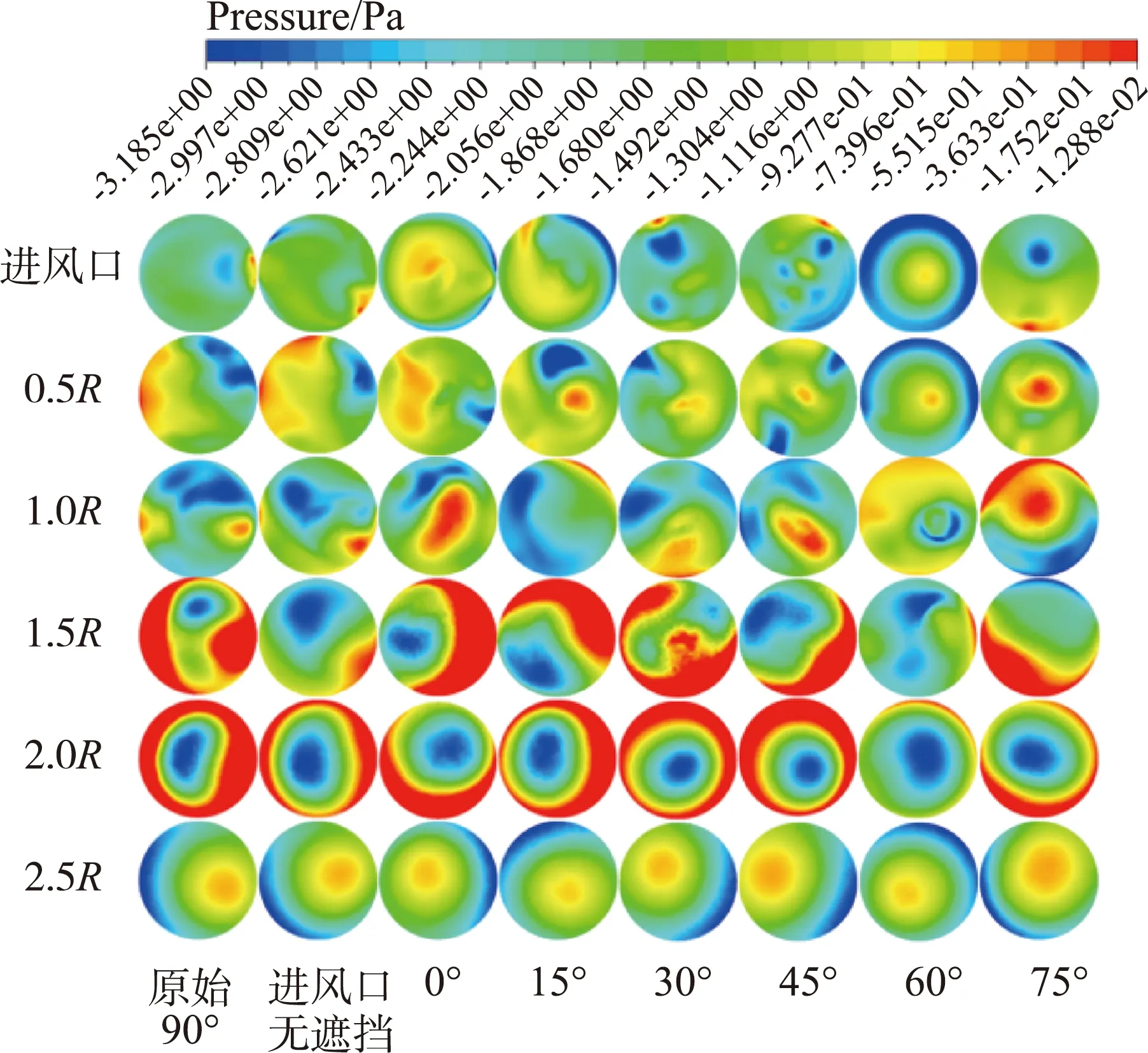
圖12 風(fēng)扇工況2 000 r/min條件不同角度進(jìn)風(fēng)口各截面壓力云圖
原始進(jìn)風(fēng)口90°時(shí),在進(jìn)風(fēng)口截面、0.5R、1.0R截面是負(fù)壓,在1.5R→2.0R這兩個(gè)截面的過程中出現(xiàn)一定程度的正壓,在集蟲瓶的內(nèi)部氣流中是不穩(wěn)定的,氣壓的不穩(wěn)定會(huì)導(dǎo)致氣流的不均勻,易產(chǎn)生紊亂的氣流。進(jìn)風(fēng)口60°的各個(gè)截面的壓力是負(fù)的,氣壓是8種結(jié)構(gòu)中最穩(wěn)定的。
對(duì)扇吸式生物光防治燈集蟲瓶進(jìn)行流體分析,在風(fēng)扇工況1 600 r/min、1 800 r/min、2 000 r/min的條件下,從壓力的角度分析,進(jìn)風(fēng)口60°可以滿足要求。
3.2 集蟲瓶出口速度均勻性研究
3.2.1 集蟲瓶出口速度均勻性評(píng)價(jià)指標(biāo)
為了研究風(fēng)扇工況,以集蟲瓶出口速度均勻性作為評(píng)價(jià)指標(biāo),在害蟲被吸入集蟲瓶的過程中,在保證害蟲被吸入集蟲瓶所允許的最小速度下,以集蟲瓶出口速度不均勻度最小為原則,為了定量分析不同風(fēng)扇工況下不同角度進(jìn)風(fēng)口出風(fēng)口速度分布的均勻性,應(yīng)用其均方差E作為評(píng)價(jià)指標(biāo)。
集蟲瓶出口速度不均勻系數(shù)
(11)
式中:N——原始方案與優(yōu)化方案數(shù);
Vi——第i個(gè)方案出口速度;
Va——各個(gè)方案的出口速度平均值。
集蟲瓶出口速度不均勻系數(shù)E表明集蟲瓶出口速度的變化幅度大小。當(dāng)不均勻度E越大,各集蟲瓶出口速度分布越不均勻,說明了各集蟲瓶出口速度一致性越差。當(dāng)不均勻度E越小,各集蟲瓶出口速度分布越均勻,說明了各集蟲瓶出口速度一致性越好。
3.2.2 不同風(fēng)扇工況下各方案集蟲瓶出口速度
通過Fluent軟件進(jìn)行數(shù)值模擬,對(duì)數(shù)據(jù)進(jìn)行選擇和處理,處理后可得到不同風(fēng)扇工況下原始方案與優(yōu)化方案各集蟲瓶出口的速度數(shù)據(jù),結(jié)果如表2所示。
對(duì)試驗(yàn)結(jié)果進(jìn)行數(shù)據(jù)處理后,可以得到不同風(fēng)扇工況的各方案集蟲瓶出口速度的不均勻度,1 600 r/min風(fēng)扇工況各方案集蟲瓶出口速度的不均勻度為1.99%,1 800 r/min風(fēng)扇工況各方案集蟲瓶出口速度的不均勻度為1.26%,2 000 r/min風(fēng)扇工況各方案集蟲瓶出口速度的不均勻度為1.32%,隨著風(fēng)扇轉(zhuǎn)速的增大,集蟲瓶出口風(fēng)速不均勻系數(shù)先減小后增大,當(dāng)風(fēng)扇工況1 600 r/min時(shí),集蟲瓶出口速度不均勻系數(shù)達(dá)到最大,當(dāng)風(fēng)扇工況1 800 r/min時(shí),集蟲瓶出口速度不均勻系數(shù)最小,由此選用1 800 r/min風(fēng)扇工況。
3.3 渦流黏度的分析
渦流黏度是表征流體流動(dòng)的一個(gè)重要物理量,通過Fluent軟件數(shù)值模擬,經(jīng)過后處理,得到風(fēng)扇工況1 600 r/min、1 800 r/min、2 000 r/min條件下各截面的渦流黏度數(shù)據(jù)如圖13所示。
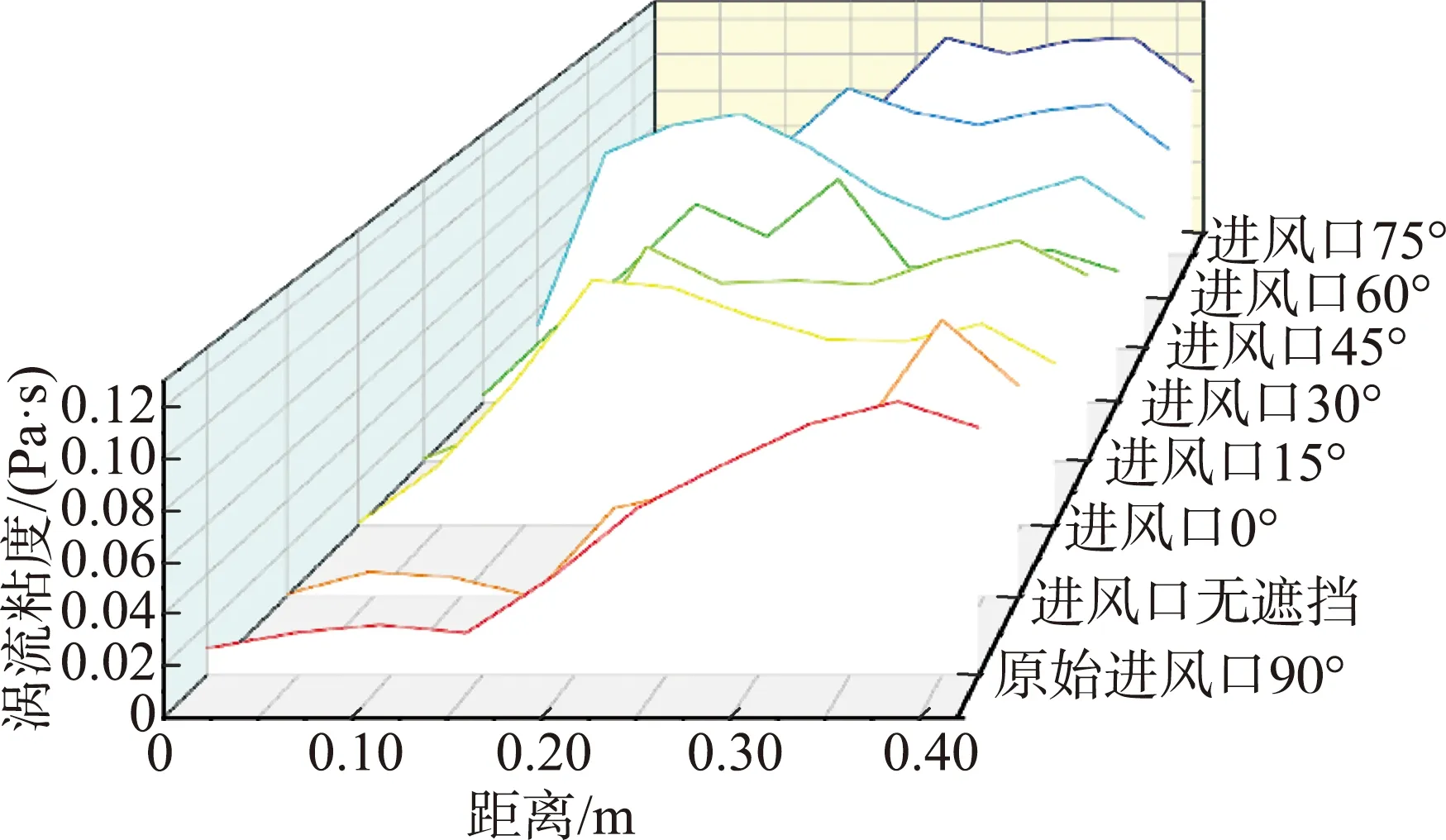
(a) 風(fēng)扇工況1 600 r/min各截面渦流黏度
進(jìn)風(fēng)口60°的結(jié)構(gòu)渦流黏度均勻,渦流黏度小,速度擴(kuò)散的速率大,速度變化的時(shí)間短,不會(huì)有旋渦的產(chǎn)生,能滿足工程的需要,從渦流黏度的角度分析,在風(fēng)扇1 600 r/min、1 800 r/min、2 000 r/min的工況下進(jìn)風(fēng)口60°可以選擇考慮。
3.4 跡線的分析
3.4.1 風(fēng)扇工況1 600 r/min中心位置截面的跡線云圖
通過流體仿真得出的跡線圖可以清晰地描述蟲子進(jìn)入集蟲瓶的軌跡變化,不同角度進(jìn)風(fēng)口結(jié)構(gòu)時(shí)中心截面的蟲子跡線圖如圖14所示。
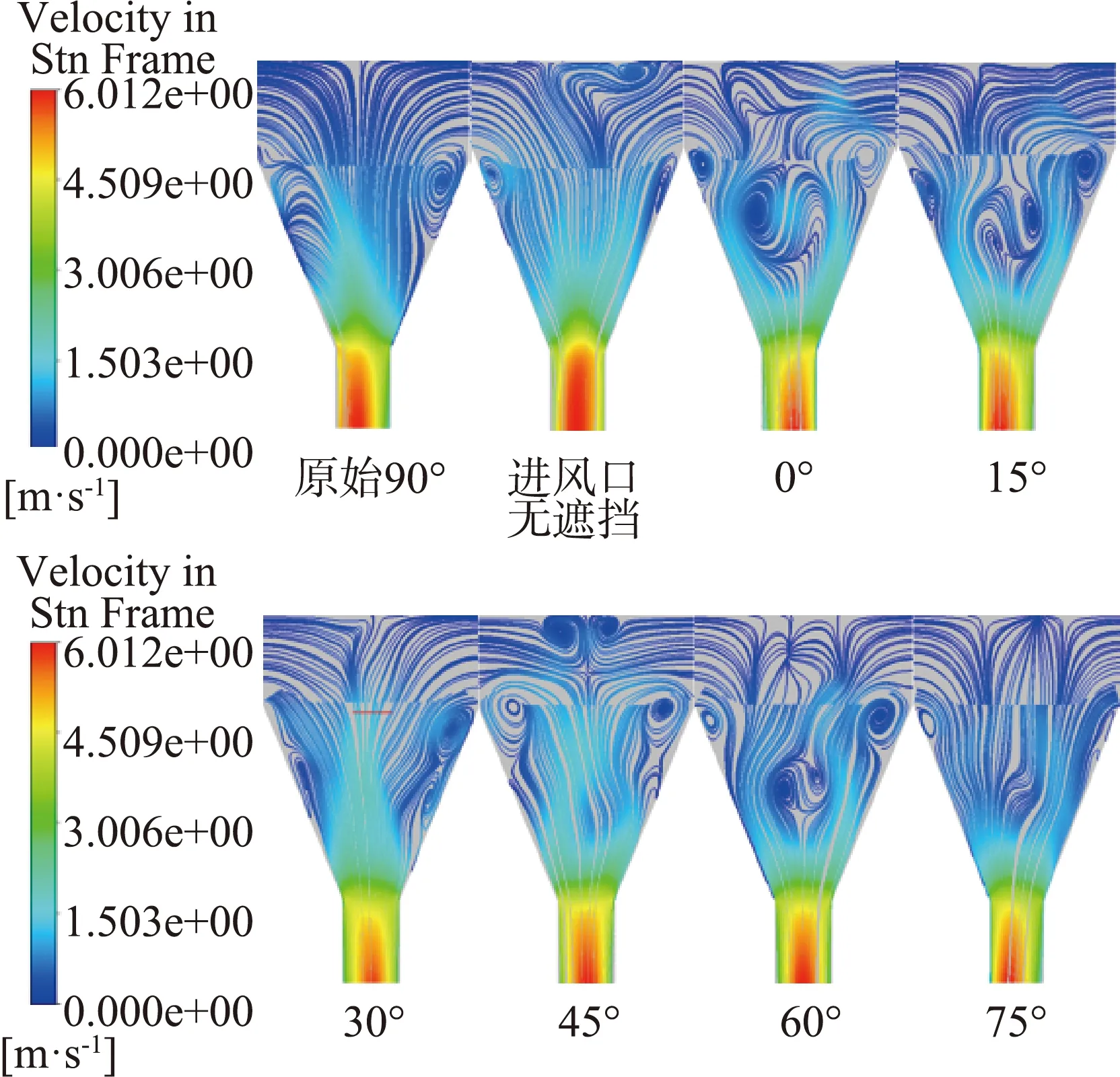
圖14 風(fēng)扇工況1 600 r/min條件中心截面蟲子軌跡跡線圖
渦流的存在會(huì)導(dǎo)致能量的浪費(fèi),降低空氣的吸收效率[20]。原始進(jìn)風(fēng)口90°時(shí)在集蟲瓶內(nèi)部出現(xiàn)兩個(gè)旋渦,尤其在進(jìn)風(fēng)口處的旋渦是比較大的,影響蟲子的吸入,是導(dǎo)致蟲子積聚的最大問題。進(jìn)風(fēng)口30°時(shí)在集蟲瓶內(nèi)部貼近壁面的位置有旋渦,但風(fēng)扇正下方位置的跡線是均勻的。進(jìn)風(fēng)口0°、進(jìn)風(fēng)口15°、進(jìn)風(fēng)口45°、進(jìn)風(fēng)口60°結(jié)構(gòu)的旋渦較大。進(jìn)風(fēng)口75°的跡線云圖在進(jìn)風(fēng)口的位置旋渦是最小的,在1 600 r/min的工況下,進(jìn)風(fēng)口75°的結(jié)構(gòu)是最佳的結(jié)構(gòu)。
3.4.2 風(fēng)扇工況1 800 r/min中心位置截面的跡線云圖
通過流體仿真得出的跡線圖可以清晰地描述蟲子進(jìn)入集蟲瓶的軌跡變化,不同角度進(jìn)風(fēng)口結(jié)構(gòu)時(shí)中心截面的蟲子跡線圖如圖15所示。
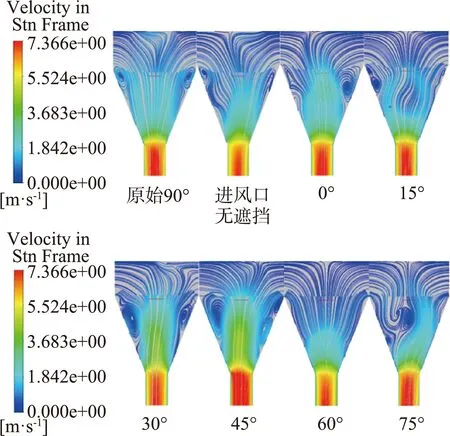
圖15 風(fēng)扇工況1 800 r/min條件中心截面蟲子軌跡跡線圖
原始進(jìn)風(fēng)口90°時(shí)在跡線云圖的兩側(cè)位置出現(xiàn)兩個(gè)旋渦,兩個(gè)旋渦是對(duì)稱的,即表示在實(shí)體模型進(jìn)風(fēng)口的一圈位置處都有旋渦,產(chǎn)生的壓力會(huì)將蟲子卷出實(shí)體模型的進(jìn)風(fēng)口外側(cè)(即蟲子在進(jìn)風(fēng)口的聚集處)。進(jìn)風(fēng)口60°的模型在截面上的跡線所表征的特征是沒有渦流,此結(jié)構(gòu)的氣流仿真沒有渦流的產(chǎn)生,對(duì)跡線的解釋為:蟲子隨風(fēng)扇所帶動(dòng)的氣流被吸入集蟲瓶,沒有渦流的產(chǎn)生,蟲子順勢被吸入集蟲瓶的底部,隨后溺水而亡。進(jìn)風(fēng)口60°的結(jié)構(gòu)是理想結(jié)構(gòu)。
3.4.3 風(fēng)扇工況2 000 r/min中心位置截面的跡線云圖
通過流體仿真得出的跡線圖可以清晰地描述蟲子進(jìn)入集蟲瓶的軌跡變化,不同角度進(jìn)風(fēng)口結(jié)構(gòu)時(shí)中心截面的蟲子跡線圖如圖16所示。
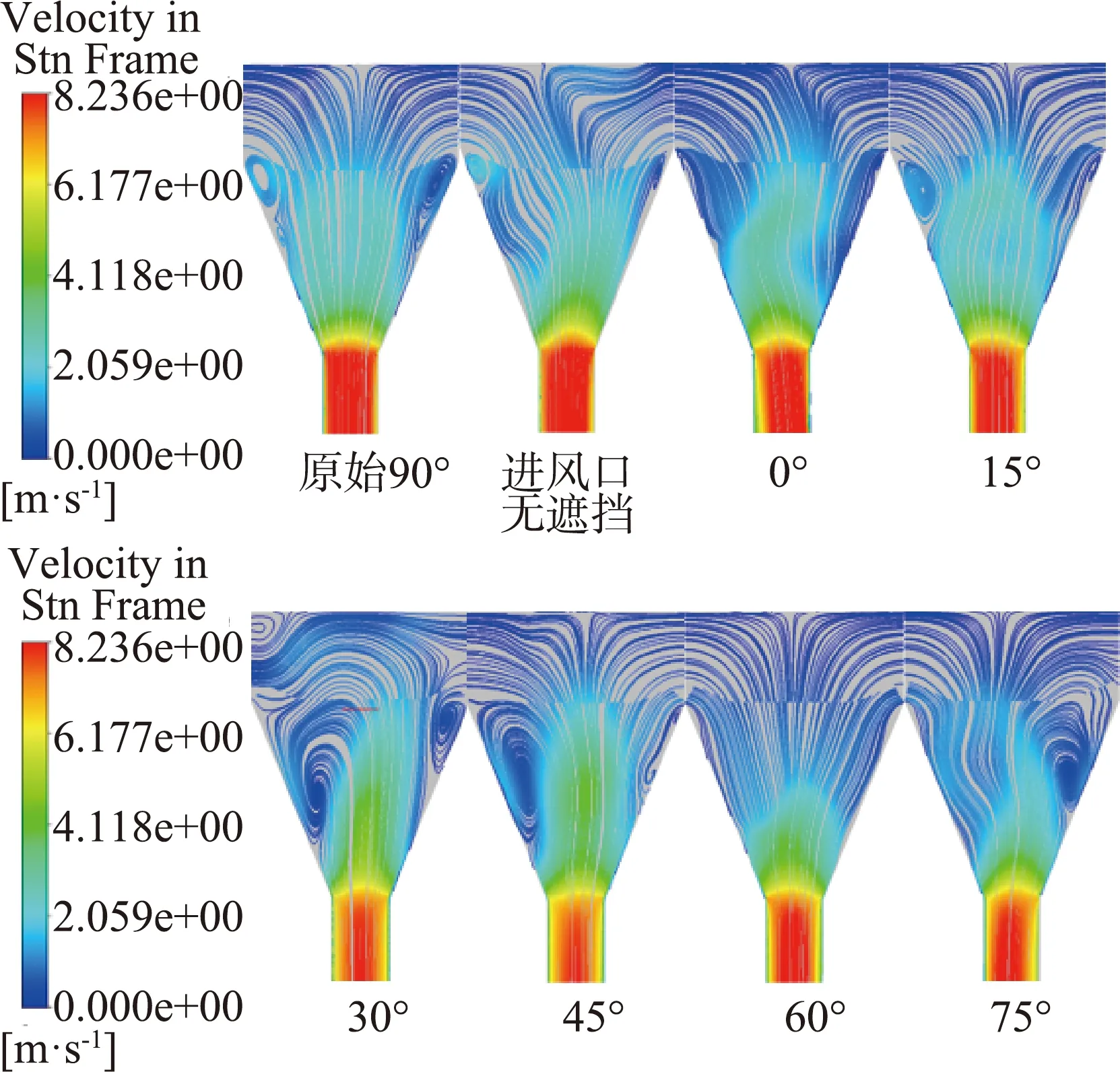
圖16 風(fēng)扇工況2 000 r/min條件中心截面蟲子軌跡跡線圖
原始進(jìn)風(fēng)口90°時(shí)在跡線云圖的兩側(cè)位置出現(xiàn)兩個(gè)旋渦,兩個(gè)旋渦是對(duì)稱的,即表示在實(shí)體模型進(jìn)風(fēng)口的一圈位置處都有旋渦,產(chǎn)生的壓力會(huì)將蟲子卷出實(shí)體模型的進(jìn)風(fēng)口外側(cè)(即蟲子在進(jìn)風(fēng)口的聚集處)。進(jìn)風(fēng)口60°的模型在截面上的跡線所表征的特征是沒有渦流,此結(jié)構(gòu)的氣流仿真沒有渦流的產(chǎn)生,對(duì)跡線的解釋為:蟲子隨風(fēng)扇所帶動(dòng)的氣流被吸入集蟲瓶,沒有渦流的產(chǎn)生,蟲子順勢被吸入集蟲瓶的底部,隨后溺水而亡。從跡線的角度分析,進(jìn)風(fēng)口60°是比較好的選擇。綜合分析風(fēng)扇工況1 800 r/min且進(jìn)風(fēng)口角度為60°作為最終的優(yōu)化方案。
4 結(jié)論
1) 根據(jù)扇吸式生物光防治燈蟲子聚集在燈口從而導(dǎo)致扇吸式生物光防治燈對(duì)蟲子吸入效率低的問題,通過Fluent軟件對(duì)扇吸式生物光防治燈原始進(jìn)風(fēng)口90°的集蟲瓶內(nèi)部管道進(jìn)行流場模擬,分析了原始進(jìn)風(fēng)口90°的扇吸式生物光防治燈蟲子聚集燈口的原因:結(jié)構(gòu)不合理產(chǎn)生的旋渦、風(fēng)扇工況,因此在結(jié)構(gòu)方面對(duì)進(jìn)風(fēng)口角度的設(shè)計(jì)進(jìn)行了進(jìn)風(fēng)口無擋板和進(jìn)風(fēng)口傾角為0°、15°、30°、45°、60°、75°的7種方案設(shè)計(jì),在風(fēng)扇工況方面采用增大風(fēng)扇轉(zhuǎn)速的方法進(jìn)行優(yōu)化。
2) 提出的進(jìn)風(fēng)口無擋板和進(jìn)風(fēng)口傾角為0°、15°、30°、45°、60°、75°的7種優(yōu)化設(shè)計(jì)方案的集蟲瓶管道內(nèi)部流場的壓力、速度、蟲子跡線圖與原始進(jìn)風(fēng)口90°的集蟲瓶管道內(nèi)部流場的壓力、速度、蟲子跡線圖進(jìn)行對(duì)比,以集蟲瓶管道內(nèi)部流場壓力為負(fù)值、速度均勻、蟲子跡線穩(wěn)定為標(biāo)準(zhǔn),得出最終優(yōu)化方案。
3) 對(duì)集蟲瓶出口速度的不均勻度研究,1 600 r/min風(fēng)扇工況各方案集蟲瓶出口速度的不均勻度為1.99%,1 800 r/min風(fēng)扇工況各方案集蟲瓶出口速度的不均勻度為1.26%,2 000 r/min風(fēng)扇工況各方案集蟲瓶出口速度的不均勻度為1.32%,1 800 r/min風(fēng)扇工況各方案集蟲瓶出口速度的不均勻度系數(shù)最小,選擇風(fēng)扇工況為1 800 r/min,且在風(fēng)扇工況1 800 r/min的條件下,進(jìn)風(fēng)口60°的結(jié)構(gòu)跡線穩(wěn)定,速度、壓力、湍流分布是均勻的,集蟲瓶沒有旋渦,集蟲瓶內(nèi)部的壓力為負(fù)值。因此風(fēng)扇工況1 800 r/min的進(jìn)風(fēng)口60°為最終的優(yōu)化方案,能夠滿足預(yù)期的結(jié)果。
猜你喜歡
天天愛科學(xué)(2022年9期)2022-09-15 01:12:54
天天愛科學(xué)(2022年4期)2022-05-23 12:41:48
當(dāng)代水產(chǎn)(2022年3期)2022-04-26 14:26:56
科學(xué)大眾(2021年9期)2021-07-16 07:02:54
軍事文摘(2020年20期)2020-11-28 11:42:50
航空世界(2020年10期)2020-01-19 14:36:20
小學(xué)科學(xué)(學(xué)生版)(2018年3期)2018-04-18 12:34:19
知識(shí)經(jīng)濟(jì)·中國直銷(2017年10期)2017-11-07 02:39:52
知識(shí)經(jīng)濟(jì)·中國直銷(2017年3期)2017-04-16 03:08:01
文學(xué)少年(有聲彩繪)(2017年2期)2017-03-06 08:10:54
 中國農(nóng)機(jī)化學(xué)報(bào)2023年8期
中國農(nóng)機(jī)化學(xué)報(bào)2023年8期
- 中國農(nóng)機(jī)化學(xué)報(bào)的其它文章
- 基于結(jié)構(gòu)方程模型的新工科學(xué)生培養(yǎng)多維空間構(gòu)建實(shí)證研究*
- 貿(mào)易便利化對(duì)中國農(nóng)產(chǎn)品出口上合組織國家貿(mào)易持續(xù)時(shí)間影響研究*
- 植保機(jī)械強(qiáng)制性產(chǎn)品認(rèn)證發(fā)展現(xiàn)狀與展望*
- 農(nóng)機(jī)社會(huì)化服務(wù)對(duì)糧食綠色生產(chǎn)效率的影響分析*
- 配氣機(jī)構(gòu)對(duì)柴油機(jī)前端噪聲貢獻(xiàn)度評(píng)價(jià)方法的試驗(yàn)研究*
- 山地模塊化電動(dòng)底盤的同側(cè)輸出行星減速器設(shè)計(jì)*