橋梁病害圖像采集系統的設計與實現
2023-09-12 00:50:30王超
科學技術創新 2023年21期
王 超
(遼寧省交通規劃設計院有限責任公司技術研發中心,遼寧 沈陽)
概述
為了確保橋梁運營安全,預防重大橋梁交通事件的發生,需要做好對關鍵構件的檢查及橋梁技術狀況評定,發現問題并采取必要的措施,消除橋梁安全隱患。現階段橋梁檢查工作大多采用人工近距離目測的方式,存在效率低,漏檢率高,存在安全隱患,自動化水平不高等問題。所以迫切需求一種新型而又高效的橋檢方法設備[1]。
隨著計算機科學與硬件設備的發展,利用機器視覺領域的相關技術進行圖像獲取、圖像識別已成為趨勢,在土木工程行業,機器視覺也慢慢滲透。針對橋梁檢查的需求,同時結合實際工作中面臨的困難,將圖像采集技術和圖像識別技術應用在橋梁病害檢測中,著眼于解決現階段橋梁檢查中存在的問題,研發一套基于圖像識別的橋梁病害采集設備,通過設備采集橋梁表觀病害,再開發配套的橋梁病害識別軟件,完成橋梁病害的檢測,提高橋梁病害檢測效率。
1 采集系統方案
該系統由電源、操作終端、拍攝終端三部分組成。電源模塊,內部集成1 個24 V 電池,為整個系統供電;操作終端,由1 臺筆記本電腦組成;拍攝終端,由相機、激光測距模塊、Camfi 模塊、云臺、腳架、控制箱組成。其中激光測距模塊由1 個激光測距儀和4 個激光指示器組成;電源線,完成電池到拍攝終端的供電;無線通信Camfi 模塊,由型號為SRWF-1021-50 的智能無線數據傳輸終端與操作終端相連同拍攝終端進行無線通信,完成供電、云臺控制信號、快門信號、測距儀信號的傳輸。
系統結構見圖1。
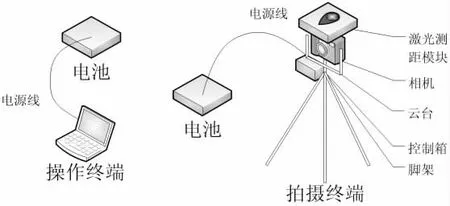
圖1 采集系統集成
2 采集圖像的處理
2.1 圖像采集
圖片采集流程見圖2。

圖2 圖像采集流程
進行圖像采集時首先需要確定拍攝范圍的大小,橋梁病害圖像采集設備控制兩軸云臺進行上下和左右兩個方向的轉動,自動拍攝圖像,在采集圖像的同時,設備還會記錄圖像的距離信息和云臺轉動的角度等參數信息,用于病害的面積、長度、寬度等信息的計算。如果由于網絡通信故障,導致拍攝失敗或者未獲取參數信息,設備還可以自動進行補拍等動作,拍攝結束后,云臺自動歸位,完成圖像的采集。
2.2 圖像拼接
橋梁病害圖像采集設備完成圖像采集后,需要對采集到的圖像進行拼接,去除圖像中的重疊區域,形成一幅完整的、視角更大的全景圖,使圖像能夠更加全面、直觀地顯示橋梁情況。
圖像拼接首先要提取圖像中的感興趣區域,由于橋梁病害識別系統采集到的圖像尺寸較大,尋找特征點時耗時久,為了提高拼接效率,盡可能多的獲得重疊區域,在圖像拼接時只對1000*3712 的感興趣區域進行特征點提取。
然后利用SURF 算法進行特征點提取,SURF 算法通過構建Hessian 矩陣來建立尺度空間[2]。根據SURF 特征點提取原理,對橋梁采集圖像進行特征點提取,根據特征點提取結果進行特征點描述,對關鍵點附加詳細的描述信息,為接下來特征點的匹配做準備。
圖像采集過程中由于光照、拍攝角度等因素的影響,相鄰重疊區域中的同一個位置并不完全一樣。需要通過特征點匹配來把兩幅重合圖像重疊區域提取出的特征點匹配起來。特征點匹配采用KnnMatch 算法,將待匹配圖片的SURF 特征與目標圖片中的全部SURF 特征進行一對n 的全量遍歷,找出相似度最高的前2 個點。
另外,匹配過程中還會因為圖像遮擋等因素產生無匹配關系的問題,解決方法如下:比較最近鄰距離與次近鄰距離:取一幅圖像中的一個SURF 關鍵點,在另一幅圖像中找出歐式距離最近的前兩個關鍵點并且最近的距離除以次近的距離得到的比率少于某個閾值T,就接受這一對匹配點。
對于拼接效果并不自然的問題,則使用加權融合方法,重疊部分由前一幅圖像慢慢過渡到第二幅圖像,將重疊區域的像素值進行權值相加合成新圖像。
2.3 圖像畸變矯正
由于相機在拍攝時會偏轉一定角度,這會使圖像發生擠壓、伸展、偏移和扭曲等變形,使圖像的幾何位置、尺寸、形狀、方位等發生改變,需要對圖像進行畸變矯正,把采集到的圖像校正到正面拍攝的效果,消除畸變[3]。
畸變矯正主要分為四個步驟:提取圖中四個激光點中心坐標、計算校正后四個激光點中心坐標、透視變換得到校正圖像、計算比例關系。
(1)提取圖中四個激光點中心坐標:系統采集圖像像素大小為5568*3712,圖像較大,處理起來耗時較長,本部分主要是獲取四個激光點中心坐標,因此只提取激光點區域即可。激光指示器安裝在相機上方,四個激光點原則上位于圖像中心處,因此,基于對多幅圖像的考量,以全部包含四個激光點為原則,提取中心處2000*2000 的感興趣區域,激光指示器打到橋面上呈現出的是四個近似圓形的紅色激光點,輸入圖像是一幅真彩圖像,通常由B、G、R 三個通道組成,分別代表藍色、綠色、紅色,其中對于紅色區域第三通道R 的值為255,利用圖像的這一特性,本部分將第三通道值為255 的圖像提取出來,并將紅色區域置為白色,其他區域置為黑色。為了方便進一步的圖像操作,采用中值濾波進行圖像的平滑和消除孤立的噪聲點,提高圖像質量。物體形狀的邊界像素組合成輪廓,進而勾勒出了物體的整體形狀。根據灰度圖像邊界兩側灰度級的突變的特征,檢測四個激光點圖像的邊界,連續的邊界像素組合在一起構成了四個激光點的輪廓,圖像矩是通過對輪廓上所有點進行積分運算(或者認為是求和運算)而得到的一個粗略特征。利用輪廓矩可以分析矩計算四個激光點的重心坐標,由于相機拍攝圖像時偏轉一定的角度,激光點所呈現的圖像并非標準圓形,因此,激光點重心坐標即代表激光點中心位置。
(2)計算校正后4 個激光點中心坐標:相機采集圖像示意見圖3。

圖3 相機采集圖像示意
坐標系z 軸為鏡頭光心,由鏡頭向遠處為z 軸正方向,x 軸為鏡頭右側水平方向,向右為x 軸正方向,y軸為鏡頭垂直方向,垂直向上為y 軸正方向。在拍攝過程中,相機的運動過程為水平轉動以及垂直轉動,使CCD 平面(xoy 面)與被測平面(abc 面)在x 軸夾角為α,在y 軸夾角為β。相機水平、垂直各偏轉一定角度,利用激光測距儀測距的示意見圖4。
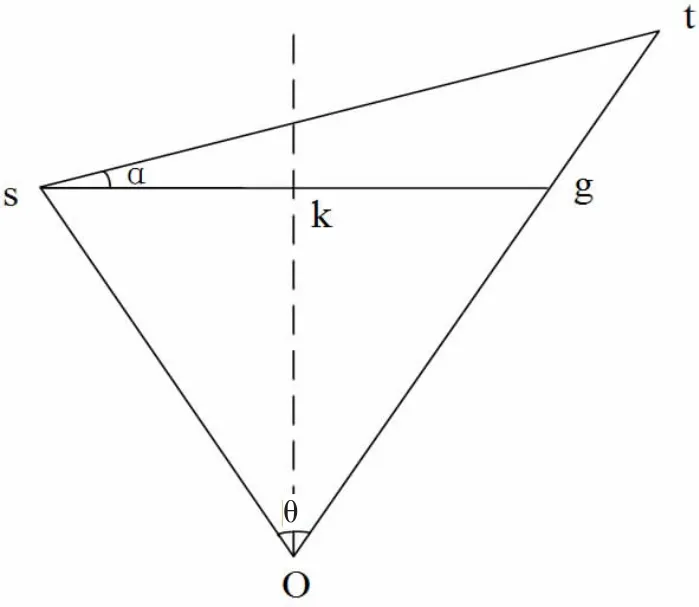
圖4 激光測距示意
圖4 中偏轉角度θ 已知,os、ot 可通過激光測距獲得。對于相機向左、向右各轉動,即水平轉動測距,根據圖4 即可求得夾角α:
再利用同上述水平轉動測距類似計算夾角β,那么圖4 中以c 點為中心,在平面內求點坐標c(0,0)、e
(3)透視變換:透視變換的本質是將圖像投影到一個新的視平面,其通用變換公式為:
(u,v)為原始圖像像素坐標,(x=x′ /w′,y=y′ /w′)為變換之后的圖像像素坐標。透視變換矩陣圖解如下:
用于產生圖像透視變換;T3=[a31a32]T表示圖像平移,所以,已知變換對應的幾個點就可以求取變換公式。根據第1、2 節提取的圖像四個激光點中心坐標,以及計算出的校正后四個激光點中心坐標,可以求出透視變換矩陣。
(4)計算比例關系根據上述計算的四個激光點中心坐標,分別計算激光點矩形的長與寬的像素距離和毫米距離,進而計算比例關系,即像素/毫米,完成了圖像的畸變矯正。
畸變矯正后的圖像即轉換成了正視圖,利用該圖像即可展開圖像中病害識別和病害參數的測量工作。
3 系統測試與驗證
為了驗證橋梁病害圖像采集系統是否到性能指標的要求,開展了系統的測試與驗證工作。
首先對設備的適用范圍(拍攝角度)進行測試明確,通過對云臺轉角與仰俯角的測試,最終明確出橋梁病害圖像采集系統拍攝角度范圍在±30°(以相機垂直拍攝面為初始位置),也就是相機與拍攝面的夾角在±(60°~90°)范圍內,畸變校正成功,且相對誤差基本保持在±10%以內。
接下來,制作長度與寬度0.2 mm*170 mm、0.5 mm*100 mm、3 mm*140 mm、1 mm*130 mm、5 mm*150 mm 的模擬橋梁病害標定物,對標定物進行識別測量,選取物距4 m/6 m/8 m/10 m 對云臺橫向和縱向不同角度、不同長度和寬度類型模擬橋梁病害進行測試,測試實驗表明,在10 m 距離時,采集系統對0.2 mm 寬裂縫長、寬相對誤差基本能保持在±10%以內。
系統測試結果表明,橋梁病害圖像采集系統滿足在10 m 距離范圍內,采集0.2 mm 寬度的裂縫的要求。
結束語
針對橋梁檢測的需求,同時結合實際工作中面臨的困難,提出了一種基于圖像識別的橋梁病害檢測技術:將圖像采集技術和圖像識別技術應用在橋梁病害檢測中,著眼于解決現階段橋梁檢測中存在的問題,研發一套基于圖像識別的橋梁病害采集設備,進行橋梁圖像的采集,然后將圖像拼接,再通過透視畸變逆變換矩陣將圖像轉化為橋梁圖像正視圖,結合后續開發的圖像識別算法及系統,完成了橋梁病害的自動化采集和識別工作,提升橋梁病害的檢測效率。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
山東工業技術(2016年15期)2016-12-01 05:31:04
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
河南科技(2014年23期)2014-02-27 14:19:15
