基于器件參數(shù)的五冗余捷聯(lián)慣組配置方法
2023-09-12 07:26:14林業(yè)豐姚安逸黃茂源
探測與控制學(xué)報 2023年4期
關(guān)鍵詞:系統(tǒng)
林業(yè)豐,謝 波,姚安逸,祁 帥,黃茂源
(西安航天精密機電研究所,陜西 西安 710100)
0 引言
隨慣性導(dǎo)航系統(tǒng)開始趨于民用化,市場對慣導(dǎo)系統(tǒng)成本、體積與可靠性的要求也不斷提高,采用冗余技術(shù),通過增加一定數(shù)量慣性儀表并開發(fā)配套處理器,使其成為擁有較高可靠性的慣性導(dǎo)航系統(tǒng)[1]。
當下對冗余系統(tǒng)的研究主要可分為四冗余(八表冗余)、五冗余(十表冗余)、六冗余(十二表冗余)等。四冗余系統(tǒng)體積小、成本低、有固定的安裝角度,可以適應(yīng)更多的安裝環(huán)境,但系統(tǒng)自由度僅為1,故其在各軸安裝同樣器件的情況下導(dǎo)航可靠性與導(dǎo)航精度均低于其他冗余系統(tǒng);六冗余系統(tǒng)采用正十二面體構(gòu)型,理論上是使系統(tǒng)可靠性與導(dǎo)航精度均能達到最優(yōu)的結(jié)構(gòu)配置,但在各軸均安裝同樣器件的情況下,該系統(tǒng)面臨體積大、成本高等問題,對其安裝環(huán)境有極大限制;五冗余系統(tǒng)相對四冗余系統(tǒng)多出一個余度,有更高的可靠性,相對六冗余系統(tǒng)體積更小,經(jīng)濟性更高,能適應(yīng)更多種導(dǎo)航需求。我國的“長征四號丙”運載火箭、“長征六號”遙八運載火箭、“長征二號丙”運載火箭等就搭載了五冗余光纖慣組進行導(dǎo)航。當下對五冗余系統(tǒng)多為研究當五軸均配置同型號儀表時導(dǎo)航系統(tǒng)精度提升情況。文獻[2]提出了通過最小二乘法進行五冗余捷聯(lián)慣組的最優(yōu)配置確定方法;文獻[3—4]提出了一種技術(shù)指標,以保證冗余慣組數(shù)據(jù)融合精度,并對冗余慣組故障檢測精度進行了分析;文獻[5]提出了通過窮舉法進行五冗余捷聯(lián)慣組最優(yōu)安裝角的確定方法;文獻[6]等提出了一種慣組信息一致性檢驗與信息融合的方法;文獻[7—8]提出了直接以儀表零漂作為加權(quán)系數(shù)的加權(quán)矩陣構(gòu)造方法;文獻[9]提出了考慮儀表桿臂誤差下的最優(yōu)配置方法。但現(xiàn)有的研究中均未從儀表參數(shù)入手考慮慣組構(gòu)型與構(gòu)型后數(shù)據(jù)融合方法,當慣組成本和體積受限制時,斜置軸通常選擇安裝精度略低但體積更小的器件,若不考慮儀表參數(shù)直接進行器件構(gòu)型與數(shù)據(jù)融合,導(dǎo)航精度很有可能不如僅使用正交三軸器件進行導(dǎo)航[10]。通過儀表參數(shù)計算器件最優(yōu)安裝角度、選擇最佳數(shù)據(jù)融合的方法后,可以抑制測量數(shù)據(jù)中的隨機誤差,進一步提升導(dǎo)航精度。
本文針對各軸測量儀器精度不相同的五冗余捷聯(lián)慣組,通過加權(quán)最小二乘法對加權(quán)矩陣的選擇、各軸儀器最優(yōu)安裝角度及各種配置方法對儀器精度的要求進行了理論性的分析,提出一種適用于各種儀表配置方案的捷聯(lián)慣組配置方法。
1 捷聯(lián)慣組安裝結(jié)構(gòu)
對于冗余捷聯(lián)系統(tǒng)而言,斜置冗余儀表用于故障檢測和隔離,同時還可通過數(shù)據(jù)融合技術(shù),將斜置軸器件測量數(shù)據(jù)利用起來,保證系統(tǒng)可靠性的同時,提高慣導(dǎo)系統(tǒng)的測量和導(dǎo)航精度。通過多傳感器數(shù)據(jù)融合技術(shù),充分利用所有的冗余測量數(shù)據(jù),可以有效抑制測量數(shù)據(jù)中的隨機誤差,為提高慣導(dǎo)系統(tǒng)導(dǎo)航精度提供了另外一條有效途徑。通過冗余儀表參數(shù)選擇合適的安裝角度與加權(quán)矩陣,可以使數(shù)據(jù)融合時加權(quán)最小二乘估計的均方誤差陣達到最小,從而使慣組導(dǎo)航精度得到進一步提升。
捷聯(lián)慣組具體安裝方案如圖1,其中g(shù)1、g2、g3、g4、g5為陀螺儀和加速度計(各方向均配置一個陀螺儀和一個加速度計),共十表,故五冗余捷聯(lián)慣組又稱為十表冗余捷聯(lián)慣組,g1、g2、g3分別沿X、Y、Z三正交軸軸向放置,g4、g5沿任意方向兩個斜向軸放置。L、K分別為g4、g5在XOZ平面的投影線;α1、α2分別為g4、g5所在斜置軸繞OZ軸正向逆時針旋轉(zhuǎn)至OY軸正向的角度;β1、β2為別為g4、g5所在斜置軸繞OY軸正向順時針旋轉(zhuǎn)至OZ軸正向的角度。
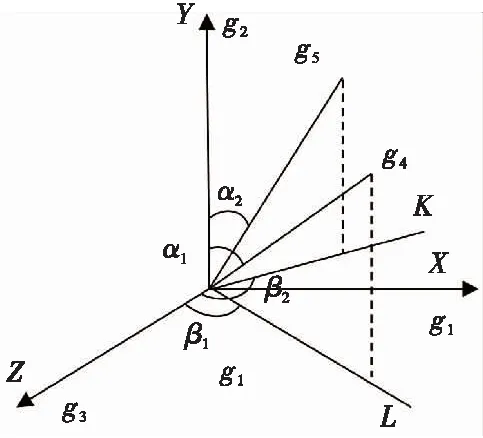
圖1 三正交兩斜置結(jié)構(gòu)配置示意圖
不考慮器件的安裝誤差,此時安裝矩陣為

2 五冗余捷聯(lián)慣組軸向配置方法
在考慮成本和體積的情況下,可選擇精度較低但體積較小的器件作為斜置軸器件,斜置軸器件測量精度的下降必然會帶來相對各軸均配置相同器件時導(dǎo)航精度的損失,但這種損失可以通過選擇合理的安裝角度與加權(quán)矩陣的方式,通過數(shù)據(jù)融合的方法來減小。當使用冗余系統(tǒng)進行量測時,若想將各表量測數(shù)據(jù)均加以利用,由于安裝矩陣非方陣,一般采取最小二乘法對數(shù)據(jù)進行擬合,但當各軸向儀表精度不同時,為了更好的融合效果,應(yīng)選用加權(quán)最小二乘法根據(jù)各表精度調(diào)整權(quán)重,并通過加權(quán)矩陣,計算出該組器件最適合的安裝角度。
2.1 加權(quán)矩陣選取



由于噪聲方差陣CV為正定陣,即它總可以平方分解為CV=STS且S可逆。記A=HTS-1,B=SWH·(HTWH)-1,顯然有AB=I,根據(jù)許瓦茨不等式:
[B-AT(AAT)-1AB]T[B-AT(AAT)-1AB]=
BTB-(AB)T(AAT)-1AB≥0,
BTB≥(AB)T(AAT)-1AB=(AAT)-1
即

(1)
不難驗證,式(1)成立條件為W=aCV-1(a為任意常數(shù)),此時加權(quán)最小二乘估計的均方誤差陣最小,即此時導(dǎo)航精度最高。
2.2 安裝角度推算
設(shè)立指標F=|G|, 由于H的每行分別是5個測量軸的方向余弦。則有

(2)
該方程組為一矛盾方程組,現(xiàn)將其線性化為
a21=O2×6,a12=O3×4。
可得方程aX=b,由于該方程組不相容,故取其唯一極小范數(shù)二乘解為
此時得到以下方程組:
(3)

2.3 冗余器件配置要求
對低成本五冗余系統(tǒng)而言,冗余器件安裝方案可分為兩種:兩個斜置軸配置不同精度的低精度器件,正交軸配置同精度高精度器件,此為方案一;兩個斜置軸配置同精度低精度器件,正交軸配置同精度高精度器件,此為方案二,方案二可視為方案一的特殊情況。下面對兩種配置方案冗余器件配置要求進行推導(dǎo),由于導(dǎo)航時器件主要噪聲來自于器件零漂且器件零漂易于獲得,故推導(dǎo)時器件噪聲均用零漂代替。
方案一:設(shè)冗余器件1標度因子為k1,器件零漂為θ1,冗余器件2標度因子為k2,器件零漂為θ2,正交器件標度因子為k0,器件零漂為θ0,且k1=ak0,θ1=bθ0,k2=ck0,θ2=dθ0;其中a、b、c、d均為正實數(shù)且均大于1。此時冗余軸1安裝角度余弦值為
(4)
(5)
(6)
(7)
方案二:設(shè)冗余器件標度因子為k1,器件零漂為θ1,正交器件標度因子為k0,器件零漂為θ0,且k1=ak0,θ1=bθ0,其中a、b均為正實數(shù)且均大于1。此時冗余軸安裝角度余弦值為
(8)
(9)
cos2α1=1/3,
(10)

(11)

可見,當斜置的兩軸均配備同精度的器件時,其器件精度不會對配置造成限制,且該種配置下的慣組不用額外計算安裝矩陣,直接按上述角度安裝即可。
3 仿真驗證
由于在導(dǎo)航過程中,儀表零漂對導(dǎo)航精度起主要影響,本次仿真在僅考慮器件零漂情況下對載體進行20 min靜態(tài)仿真模擬,以驗證該配置對載體飛行精度提升效果。


α1=54.734 7°或125.264 4°,
α2=54.734 7°或125.264 4°,
β1=±45°或±135°,
β2=±45°或±135°。
選擇α1=54.734 7°,α2=125.264 4°,β1=-135°,β2=-135°,此時|G|=0.842 3,該配置下|G|最接近0.839 6,安裝結(jié)構(gòu)如圖2所示。
圖2 仿真方案結(jié)構(gòu)配置示意圖
設(shè)置初始誤差為0,靜態(tài)仿真20 min,其中前5 min進行對準,后15 min進行靜態(tài)導(dǎo)航仿真,進行100次仿真,每次仿真隨機生成誤差。選擇指標為CEP指標,即包含50%飄移點的圓的半徑。仿真結(jié)果如表1所示。
表1 CEP指標(含50%漂移點圓的半徑)對比
靜態(tài)導(dǎo)航仿真誤差變化如圖3所示。
圖3 靜態(tài)仿真導(dǎo)航誤差
分析上述數(shù)據(jù),可以發(fā)現(xiàn):采用配置0時,五軸導(dǎo)航相比三軸導(dǎo)航位置誤差減小10.89%,加入合適的加權(quán)矩陣后,相比未加入加權(quán)矩陣導(dǎo)航位置誤差減小9.5%,相比三軸導(dǎo)航位置誤差減小19.35%;采用配置1,即未通過儀表參數(shù)確定安裝角度時,數(shù)據(jù)融合后相對三軸導(dǎo)航,位置誤差反而提升了21%。這可能是由于冗余軸儀表精度相對正交軸儀表精度相差較遠,相比原文使用斜置軸儀表零漂為正交軸儀表零漂的1.5倍,本文斜置軸儀表零漂約為正交軸儀表零漂的3.33倍,此處也說明根據(jù)儀表參數(shù)配置慣組安裝角度的工程實用性。
4 結(jié)論
本文提出一種在成本體積預(yù)算有限的情況下,五冗余慣組基于儀表精度參數(shù)確定加權(quán)矩陣和儀表安裝角度的方法。該方法通過計算加權(quán)二乘估計的均方誤差陣,得到基于該配置下的最優(yōu)加權(quán)矩陣及最小均方誤差陣,再由最小均方誤差陣計算最優(yōu)配置角度,并對五冗余慣組配置要求進行了推算。仿真證明,經(jīng)該方法得出的配置方案,相比三軸導(dǎo)航位置誤差減小10.89%,加入合適的加權(quán)矩陣后,相比未加入加權(quán)矩陣導(dǎo)航位置誤差減小9.5%,相比三軸導(dǎo)航位置誤差減小19.35%。
本文針對冗余慣組各軸配置不同精度測量儀器的情況,通過加權(quán)最小二乘法對加權(quán)矩陣的選擇、各軸儀器最優(yōu)安裝角度及各種配置方法對儀器精度的要求進行了理論性的分析。在后續(xù)工作中將對本文提出的配置方法進行實驗驗證。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32