基于多因素作用的修形擺線針輪傳動機構接觸分析
2023-09-15 09:15:14張偉昌韓炬趙琪張建喜
機械工程師 2023年9期
張偉昌,韓炬,趙琪,張建喜
(華北理工大學機械工程學院,河北唐山 063210)
0 引言
RV減速器是包含行星齒輪傳動和擺線針輪傳動的兩級傳動減速器,其中擺線針輪傳動是RV減速器中最為重要的傳動方式,它是以擺線為外齒廓和以圓柱針輪為內嚙合的少齒差行星傳動,也對RV減速器的傳動精度和壽命有著重大影響[1]。
有不少學者研究了關于擺線針輪嚙合的受力和接觸狀況。張愛榮[2]通過對標準齒形無隙嚙合和修形齒形有隙嚙合下的作用力計算,得出最大嚙合作用力與同時嚙合齒數;張月娜[3]通過建立的擺線針輪副誤差模型,將針齒半徑、針齒分度圓直徑、修形等因素的誤差考慮進去,并進行了有限元分析,實驗結果表明,針齒半徑誤差對齒面接觸應力影響最大;邢利娜[4]對RV減速器進行參數化建模,并將模型導入ADAMS進行標準齒廓和修形齒廓下的運動學分析,結果顯示擺線針輪減速器在啟動瞬間嚙合力較大,隨后便穩定,且在徑向間隙變大時,嚙合齒數與最大嚙合力成反比,以及嚙合數減少,最大嚙合力增大;畢愛賓[5]對理論情況下的擺線齒廓進行了受力分析,通過ANSYS軟件對擺線針輪進行有限元分析并驗證了優先模型的合理性,在分析中得出了接觸應力最大值時刻和接觸應力集中現象的結論;梁帥鋒等[6]通過將輪齒接觸分析技術融入到RV減速器擺線針輪輪齒接觸分析中,以此來計算擺線針輪副在空載情況下的傳動誤差曲線、實際嚙合區間和各嚙合狀態下的回程誤差;張躍明[7-8]通過ANSYS Workbench建立的三維模型對擺線針輪嚙合接觸進行了有限元分析,并得到了有關嚙合接觸后的作用力、最大應力和接觸區域的變化規律;李群超[9]通過在MATLAB得到的坐標在SolidWorks中建立了修形前后擺線針輪的三維模型,繼而在ADAMS中對這兩個模型進行仿真,結果顯示修形后的初始間隙會變化,從而導致齒數與最大接觸有所改變。張躍明[10]通過建立擺線針輪的傳動承載模型樣機,研究了偏心距對擺線針輪承載的影響;Li[11]將轉臂圓柱滾子軸承因素考慮到了擺線針輪傳動系統中并建立了多齒嚙合接觸動力學模型,通過分析擺線針輪傳動精度和傳動性能,研究多齒嚙合接觸特征和軸承接觸載荷變化,為擺線針輪傳動要求和轉臂軸承使用壽命提供理論依據。
雖然已有很多人對擺線針輪的修形和誤差傳動進行了研究,但很少有人能夠將所有影響擺線針輪傳動的因素結合起來進行研究[12]。因此,本文通過對同一間隙下的不同等距修形、移距修形、針齒半徑誤差、針齒徑向誤差和針齒角度誤差進行了正交試驗分析,運用仿真分析對擺線針輪嚙合的接觸特征和規律進行研究。
1 RV減速器的結構與原理
1.1 RV減速器的結構
RV減速器是一個第一級減速機構為漸開線直齒輪行星輪系、第二級減速機構為擺線針輪傳動的兩級減速器。第二級擺線針輪傳動為擺線外齒廓與圓柱針輪內齒廓組成。
在RV減速器工作過程中,通常由伺服電動機通過輸入軸帶動行星輪進行傳動,再通過曲柄軸將動力帶入下一級,曲柄軸上端與行星輪固連,下端通過滾動軸承與擺線輪相連,動力通過滾動軸承使擺線輪做偏心運動與針齒進行嚙合,因此擺線輪在繞機構中心公轉的同時也在繞擺線輪中心自轉,從而實現二級減速的目的。
擺線針輪嚙合傳動原理如圖1所示。在擺線針輪傳動機構中,針輪的位置是固定不變的,xpOpyp為針輪坐標系,也叫固定坐標系,Op為坐標系原點;xcOcyc為擺線輪坐標系,xc軸方向為轉臂方向,Oc為坐標系原點。圖1中擺線輪繞針齒中心Op進行公轉,轉動角度為α,同時擺線輪也會進行自轉,其方向與公轉方向相反。

圖1 擺線針輪嚙合原理
擺線針輪在傳動過程中,擺線輪會與多個齒進行嚙合,而在這些嚙合點處都會有指向節點P的嚙合力F。在針齒固定坐標系中,嚙合滾針與轉臂方向夾角為β,嚙合力與轉臂方向夾角為γ。
1.2 擺線齒廓曲線方程
擺線針輪通用的齒形方程式[13]如下:

表1 RV減速器基本參數
式中:e為偏心距;rp為針齒分度圓半徑;zp為針齒齒數;rrp為針齒半徑;Δrp為擺線輪移距修形量;Δrrp為擺線輪等距修形量;iH為擺線輪齒數與針輪齒數的相對傳動比,iH=zp/zc;φ為轉臂相對于某一針齒中心矢徑的轉角,也叫做嚙合轉角;k1為短幅系數,k1= ezp/(rp-Δrp);s=1+k21-2k1cos φ。
1.3 擺線針輪機構接觸應力計算
一般標準擺線輪在與針齒嚙合時,有一半的針齒會參與到嚙合的過程中。但是為了方便安裝和拆卸,通常會對擺線輪進行修形處理,這樣擺線輪與針齒嚙合時的嚙合齒數也會小于針齒齒數一半。此時擺線輪與針齒之間就會存在不同的間隙,這個間隙就叫初始間隙。擺線針輪待嚙合點處法線方向的初始間隙公式[13]為
其中,φ為轉臂相對于某一針齒中心矢徑的轉角,也叫做嚙合轉角。
當擺線輪傳遞載荷時,由于受到轉矩作用,擺線輪與針齒產生接觸變形,擺線輪也會轉過一個角度?,擺線輪齒與針齒嚙合所產生的接觸變形量為
式中:?為由于接觸變形導致擺線輪的轉動角度;li為第i個針齒嚙合點或待嚙合點公法線方向與擺線輪中心的距離。
假設擺線針輪機構傳動過程中第i對擺線針齒嚙合所產生的實際變形量為Δi,Δi=δi-Δdi,可以根據實際變形量的值對機構中擺線輪與針齒是否實際嚙合進行判斷。當Δi>0時,參與嚙合,進行傳動;當Δi=0時,處于臨界狀態,即將參與嚙合或即將退出嚙合;當Δi<0時,不參與嚙合。由此可以確定負載情況下的同時嚙合齒數區間和個數。
由于存在制造誤差,傳到兩個擺線輪的轉矩是不相等的,即其中一個的Tc值略超過0.5T,因此在力分析與強度計算時,取Tc=0.55T,則擺線輪與針輪的嚙合作用力為
式中,T為輸出軸傳遞的總轉矩,T=167 N·m。
因此對于標準擺線輪,針齒作用于擺線輪的最大嚙合作用力Fmax=262 N。根據Hertz理論,齒面接觸應力計算式為

2 RV減速器三維模型的建立
基于RV-20E參數建立虛擬樣機,首先建立零部件,然后對零部件按固定位置進行裝配,如圖2所示。

圖2 RV減速器虛擬樣機模型
3 正交試驗設計
3.1 因素水平的確定
由于RV減速器的第二級傳動對傳動誤差和精度的影響較大,所以主要針對擺線針輪傳動進行研究。本試驗中,主要針對等間隙擺線針輪傳動中單個針齒存在誤差進行接觸研究。其因素分為等距修形、移距修形、針齒半徑誤差、針齒徑向誤差和針齒角度誤差。由于在初始位置嚙合間隙存在一致性,因此本仿真試驗主要針對Δ=0.05 mm進行研究。通過改變等距修形或移距修形,得到移距修形或等距修形。因此正交試驗為四因素三水平,而為了試驗的可靠性,可以做兩個正交試驗。根據文獻確定正交試驗表,選取L9(34)正交表。
不同等距修形下,各因素的水平如表2所示。

表2 試驗1因素水平
不同移距修形下,各因素的水平如表3所示。

表3 試驗2因素水平
3.2 試驗過程
根據正交試驗表建立RV減速器虛擬樣機,通過改變擺線輪和針齒相關參數,而多個誤差因素則作用在第21號針齒上,可以得到18個虛擬樣機模型。因此通過得到的虛擬樣機模型對擺線針輪接觸進行仿真分析。
輸入軸加載恒定轉速,轉速為2823 r/min;輸入軸旋轉角度為1107°;單齒通過步數為8步。其他仿真參數為默認,設置完成后便可進行擺線針輪接觸仿真分析。
4 結果分析
仿真結果分為靜態分析結果和動態分析結果,其中靜態分析為初始狀態下擺線輪與針齒嚙合時接觸齒對的接觸載荷;動態分析是指在擺線輪傳動過程中對擺線輪與針齒接觸特征的分析,包括接觸齒對、角傳動誤差、針齒接觸載荷等。
4.1 靜態分析結果
圖3為靜態分析下針齒受力齒號和接觸載荷,從圖中可以得出擺線與針齒的嚙合齒數和接觸載荷隨擺線輪的修形發生變化,移距修形減小,針齒的最大接觸載荷越來越小,但針齒接觸個數會有所增加。

圖3 接觸載荷在各個接觸針齒上的變化圖像
4.2 滯后曲線
當擺線輪受到不同的轉矩時,擺線輪會存在偏轉角度,影響擺線輪與針齒的嚙合受力載荷。而這個偏轉角度可以用滯后曲線來表達。圖4所示為擺線輪轉動角度隨轉矩變化的點線圖,從圖中可以看出,當初始間隙固定不變時,隨著移距修形的減小或是等距修形的增加,轉動角度會增大。在同一移距修形下,隨著轉矩的增加,轉動的角度會增大,且在轉矩小于100 N·m時,增加幅度較大。

圖4 轉矩對轉動角度曲線圖
4.3 接觸齒數
圖5 所示為擺線輪-針齒接觸齒數隨擺線輪齒廓修形的變化關系圖,從圖中可以看出,接觸齒數集中在3~5 個齒,在初始間隙不變時,隨著移距修形減小,接觸齒數增加。

圖5 接觸齒數曲線圖
4.4 角傳動誤差
角傳動誤差是指擺線輪相對于針輪的超前或滯后變化。圖6所示為在不同移距修形量下角傳動誤差的變化情況,可以看出,當初始間隙不變時,隨著擺線輪齒廓修形,角傳動誤差不會隨擺線輪齒廓修形、針齒半徑誤差和位置誤差發生變化。

圖6 角傳動誤差曲線對比圖
4.5 針齒最大接觸載荷
4.5.1 試驗1最大載荷分析
試驗1參數正交表及試驗結果如表4所示。

表4 試驗1結果
通過試驗結果中的極差分析,可以看出對最大接觸荷載影響最大的是針齒半徑誤差,其次為針齒徑向誤差,然后是針齒角度誤差,而擺線輪等距修形的影響最小。
圖7所示為各個針齒上的最大接觸載荷變化規律曲線,可以看出在存在誤差的21號針齒周圍最大接觸載荷變化最為明顯。

圖7 各針齒最大接觸載荷
圖8所示為針齒半徑誤差對最大接觸載荷的影響,隨著針齒半徑誤差的減小,在最大接觸載荷會有所減小,且會影響到周圍針齒的接觸載荷。

圖8 針齒半徑誤差對最大接觸載荷曲線圖
圖9所示為等距修形對接觸載荷的影響,可以看出,隨著等距修形增大,最大接觸載荷整體會逐漸減小;當在同一等距修形下,在向存在誤差的針齒靠近時,接觸載荷會有小幅度增加。

圖9 等距修形對最大接觸載荷的曲線圖
4.5.2 試驗2最大載荷分析
試驗2參數正交表與試驗結果如表5所示。
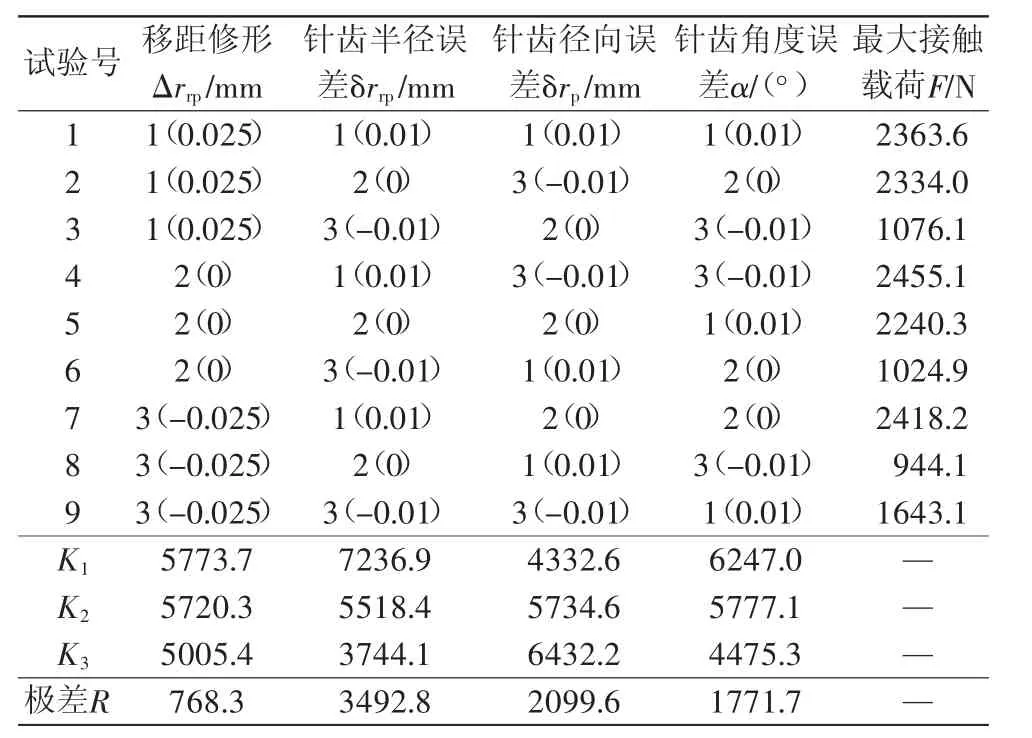
表5 試驗2接觸載荷結果
通過正交試驗表可以看出,對最大接觸荷載影響最大的是針齒半徑誤差,其次為針齒徑向誤差,然后是針齒角度誤差,而擺線輪移距修形的影響最小。
圖10所示為各個針齒上的最大接觸載荷變化規律曲線,可以看出,在存在誤差的21號針齒周圍最大接觸載荷變化最為明顯。

圖10 各針齒最大接觸載荷
圖11所示為針齒半徑誤差對最大接觸載荷的影響,隨著針齒半徑誤差的減小,在最大接觸載荷會有所減小,且會影響到周圍針齒的接觸載荷。

圖11 針齒半徑誤差對最大接觸載荷的曲線圖
圖12所示為移距修形對接觸載荷的影響,可以看出,隨著移距修形由正變負,最大接觸載荷整體會逐漸減小;當在同一移距修形下,在向存在誤差的針齒靠近時,接觸載荷會有小幅度增加。

圖12 移距修形對接觸載荷的曲線圖
5 結論
本文建立了RV減速器的虛擬樣機模型,并通過正交試驗的方法研究了擺線輪等距修形、移距修形、針齒半徑誤差、針齒徑向誤差和針齒角度誤差對擺線針輪傳動的影響。研究表明:1)靜態分析下,擺線輪修形對針齒嚙合齒數和接觸載荷存在影響,且移距修形減小,接觸齒數增加;當移距修形減小時,最大接觸載荷逐漸減小。2)對擺線輪施加的轉矩越大,擺線輪轉動角度越大,且移距修形越大,偏轉角度越大。3)當初始間隙不變時,隨著移距修形量減小,擺線輪-針齒接觸齒數增加。4)在研究角傳動誤差時,當初始間隙不變,移距修形、針齒半徑誤差和針齒位置誤差為非關鍵影響因素。5)初始間隙不變時,對最大接觸荷載影響程度依次為:針齒半徑誤差>針齒徑向誤差>針齒角度誤差;當初始間隙不變,等距修形增大時,最大接觸載荷會整體減小。