高效鍛造噴墨機械手設計及運動學分析
2023-09-15 09:15:02周鵬中
機械工程師 2023年9期
周鵬中
(連云港杰瑞自動化有限公司,江蘇 連云港 222006)
0 引言
隨著“中國制造2025”戰略的不斷推行,我國的金屬鍛造產業正朝向設備智能化、產線自動化邁進。在模鍛過程中,為了使鍛件更容易從模具中取出并完成脫模,需要將配置好的石墨乳[1]均勻地噴涂到模具上,以達到潤滑、降溫、保護模具的效果。目前,仍以人工噴墨形式為主,勞動強度大、效率低、安全性不高;部分企業開發的自動噴墨裝置多為單點固定式,存在石墨乳噴涂不均勻、覆蓋不到位,造成鍛件成型質量差、降低模具使用壽命等問題。因此急需一種高效鍛造噴墨裝置來滿足鍛造自動化的需求。鑒于此,本文設計了一款高效鍛造噴墨機械手,既能滿足噴涂的均勻性,又能實現在空間內的多路徑運動規劃。
1 機械手結構設計
針對在鍛造噴涂過程中的具體需求,設計了圖1所示的高效鍛造噴墨機械手。該裝置主要包括直線運動機構、旋轉運動機構、搖擺運動機構和升降機構等部分。

圖1 高效鍛造噴墨機械手整體圖
1.1 直線運動機構
直線運動機構[2]如圖2所示,是由直線驅動電動機與直線電動機座連接并固定在齒輪箱上,帶動直線運動齒輪轉動,齒輪與圓齒條相嚙合,穿過左右兩導向軸套。圓齒條既作為傳動機構,又作為導向機構,同時也是末端噴槍的安裝支架,減少了零部件數量,使機構的結構更加緊湊。當機械手開始工作時,裝置需要到達指定位置,此時直線驅動電動機開始工作,帶動直線運動齒輪逆時針轉動,此時與齒輪嚙合的圓齒條向左移動,與圓齒條固定的左側的風琴保護罩展開,右側風琴保護罩折疊,到達鍛造的模具工作處,帶動末端噴槍做往復直線運動,有效保證模具前后段充分得到石墨乳噴涂。

圖2 直線運動機構
1.2 旋轉運動機構
旋轉運動機構如圖3所示,其回轉驅動電動機與回轉運動齒輪相連并固定在齒輪箱上,齒輪箱連接到回轉支承的內圈,升降立柱固定到回轉支承外圈上,回轉運動齒輪與回轉支承齒輪相嚙合。當旋轉運動機構開始工作時,回轉驅動電動機帶動回轉運動齒輪轉動,通過齒輪嚙合帶動運動齒輪箱繞升降立柱的軸心做圓周運動,使整體的噴墨機械手可實現自由旋轉的功能,結合固定在齒輪箱上的直線運動機構,形成兩級串聯的平面運動機構,扇形工作區域內任一點可達。

圖3 旋轉運動機構
1.3 搖擺運動機構
本文所設計的搖擺運動機構[3]如圖4 所示,機構內的步進電動機穿過雙桿夾緊塊與偏心輪相連接,嵌入搖擺頭內,石墨乳霧化噴槍與搖擺頭相固定,圓齒條通過雙桿夾緊塊和回轉軸銅套連接到搖擺頭上。當搖擺運動機構開始工作時,步進電動機帶動偏心輪轉動,偏心輪與搖擺頭長條槽內切,以圓齒條作為中心軸線開始做左右往復搖擺運動,此時石墨乳霧化噴槍呈扇形運動軌跡對模具的模腔側面凹槽進行霧化噴涂,模擬人工作業時的左右搖擺動作,使得噴墨裝置對于復雜模腔的兼容性得到進一步的加強,裝置的適用性變得更加廣泛。

圖4 搖擺運動機構
2 運動學建模及分析
為實現鍛造過程中石墨乳噴涂的均勻,必須保證石墨乳霧化噴槍在噴墨機械手的驅動下,擬合模腔輪廓形狀做勻速運動。鍛件可以分為長軸類、圓盤類、枝芽類、彎曲類,其中長軸類和圓盤類均屬于回轉體鍛件,在鍛造行業中最為常見,因此本文著重分析回轉體鍛造過程中噴墨路徑的運動學模型。
2.1 簡化建模
自動化生產線中,鍛件產品輪廓雖會變化,但為保證機器人上下料的穩定,模具中心點絕對一致。因此簡化機械手運動模型[4]時(如圖5),將平面坐標系原點選在模具中心點O位置。機械手安裝定位后,以機械手回轉中心點P與模具中心點O連線為坐標系Y軸,其水平垂線為X軸。

圖5 機械手運動模型
將機械手簡化為一根可伸縮旋轉的桿,一端為旋轉中心點P,另一端為噴涂點A。對于回轉類模具,其噴涂路徑一般為繞模具中心的圓形,可簡化為坐標系中繞原點O回轉、半徑為R的圓弧。噴涂點A沿圓弧勻速運動,角速度為ω,機械手的直線運動對應桿長PA伸縮,回轉運動對應夾角θ變化。
2.2 運動學方程推導
已知,圓周曲線方程為:
式中:R為回轉半徑,根據鍛造工藝設定;ω為圓周角速度,根據鍛造工藝設定;t為時間變量,初值為0。
根據幾何原理,可知桿的長度變化方程為
式中:L為桿長,即P、A兩點距離;H為常數,即P、O兩點距離。
桿的角度變化方程為
對以上兩個公式進行求導,即可得到桿直線運動的線速度公式和旋轉運動的角速度公式如式(4)、式(5)所示。
直線運動線速度v的計算公式為
旋轉動作角速度J的計算公式為
結合兩種運動對應的傳動系統減速比[5],即可得到驅動電動機的速度控制方程,利用伺服電動機的運動控制器可以準確地驅動直線運動電動機和回轉運動電動機按速度曲線動作,噴槍在兩種運動的復合下,自動形成圓周運動的合成路徑。
另外,對于平面內其他形式的運動,如曲線運動、直線運動等,也可以通過建立其運動學模型,得到電動機控制的輸入方程,實現任意路徑的合成動作,提高機械手對于不同類型鍛件的適應性。
2.3 MATLAB仿真計算
為了更加了解高效鍛造噴墨機械手各部件的運動特性,運用MATLAB[6-8]進行數模求解,得出圖6所示的兩機構運動特性仿真曲線,可知運動學建模準確,直線運動和旋轉運動動作平緩,加減速過程近似于正弦曲線,運動沖擊小,能夠有效保證機械手動作的穩定可靠。
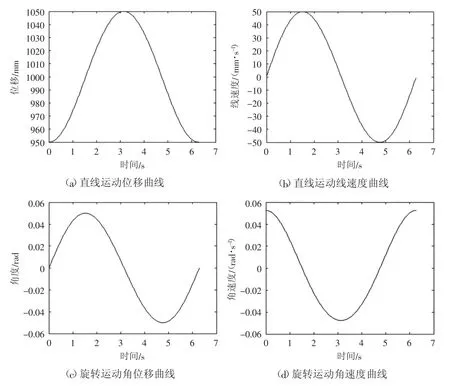
圖6 MATLAB運動仿真曲線圖
3 結語
針對現有的鍛造用石墨乳噴涂裝置需求,本文設計了一種高效鍛造噴墨機械手,通過理論分析和模擬仿真可以得出以下結論:1)通過直線+旋轉的兩自由度動作組合,實現了平面內運動曲線的路徑合成,動作范圍更大,結構更加緊湊,可以實現擬合模腔形狀的石墨乳噴涂,覆蓋更加均勻。2)旋轉運動機構通過偏心輪的往復運動,模擬人工作業時的搖擺動作,提高了對復雜模腔的噴涂兼容性,滿足裝置在使用過程中不同的需求。3)根據運動路徑分解的各機構速度曲線變化平緩、動作順暢,避免了機構往復運動過程中的沖擊,提高了運行的穩定性。
工業自動化是我國不斷追求的目標和不斷努力的方向,人工噴涂石墨乳工作強度大、效率低,本裝置通過多軌跡的組合運動,實現噴涂路徑的自由規劃,對鍛造行業有一定的工程應用價值。