基于改進免疫算法的裝填機械手軌跡規劃
2023-09-16 09:49:44王國濤高崇仁黃江濤田星宇
起重運輸機械 2023年17期
關鍵詞:規劃
王國濤 高崇仁 黃江濤 田星宇
太原科技大學機械工程學院 太原 030024
0 引言
機械手軌跡規劃的意義在于確定機械手的運動路徑,使其能夠完成預定的任務,通過高效、連續且準確的軌跡規劃,可使得運行時間達到最優,運行指標更加合理,還可保證機械手的安全性,避免與人員或其他設備發生碰撞,防止事故發生,故對于機械手的研究來說軌跡規劃是至關重要的一部分[1]。
隨著對機械手軌跡規劃研究的逐漸深入,出現了更多高效的優化方法。李駿等[2]研究自主設計的油茶花粉采摘機械臂,提出一種改進粒子群算法,并結合5-5-5多項式插值計算方法對該機械臂進行軌跡規劃,驗證了改進后算法的適用性和高效性;段倩倩等[3]提出一種改進混合粒子群算法對某六自由度機械手軌跡規劃問題進行研究,使用5-7-5 插值多項式構造軌跡曲線,改進后的算法運行時間短,穩定性更強;代瑞恒等[4]采用七次多項式插值對機器人關節軌跡進行優化,提出一種改進量子遺傳算法,引入正態分布概率密度函數以改進量子門旋轉角步長策略,對關節運行軌跡進行最短時間優化,有效縮短了機械臂關節運動時間;綦慧等[5]提出一種改進鯨魚算法,并采用五次樣條函數擬合關節軌跡,驗證了改進鯨魚算法對解決機械臂軌跡規劃多目標優化問題的有效性;李純艷等[6]提出一種改進麻雀搜索算法用于解決機器人能耗最優軌跡規劃問題,采用七次B 樣曲線構造機器人在關節空間的軌跡,并通過仿真驗證改進后算法的優越性和實用性。
在軌跡規劃過程中不僅要保證位移連續,還要實現速度和加速度的連續,防止出現由于運動突變而對機械手造成損害。針對該裝填機械手的軌跡規劃是為了使得該機械手在約束條件下以運行時間為優化目標,并使得各關節的速度、加速度隨時間變化的曲線平滑且沒有突變。文中提出基于免疫算法結合七次多項式插值計算方法對自主設計的裝填機械手進行軌跡規劃,使得該裝填機械手運行時間達到最優,各關節速度、加速度曲線平滑且連續。
1 裝填機械手介紹
使用五自由度裝填機械手去完成目標工作任務。該機械手的樣機模型如圖1 所示,關節最大速度不超過 2 π/3 rad/s,關節最大加速度不超過 π/2 rad/s2。
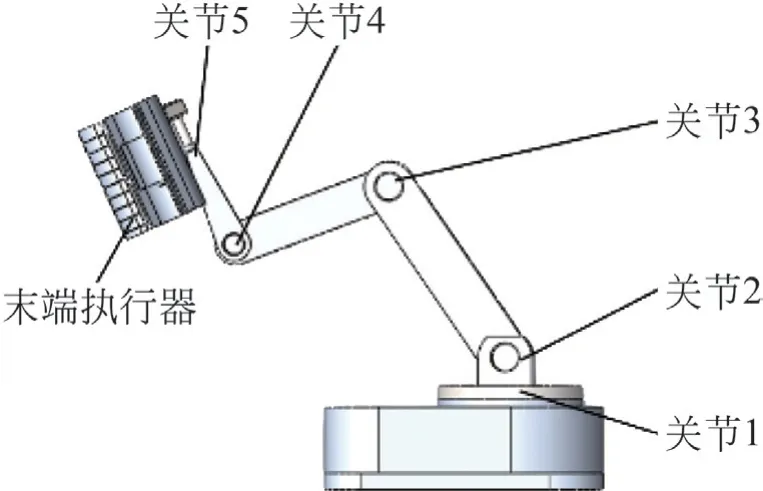
圖1 裝填機械手樣機模型
針對于該機械手有5 個自由度,分別是關節1 和關節5 的回轉以及關節2、關節3、關節4 的旋轉。對于該機械手來說,末端執行器的抓、放動作和推進動作不會對該裝填機械手末端執行器的位姿產生影響,故末端執行器的抓、放和推進不屬于該機械手的自由度。該裝填機械手的各關節變量范圍如表1 所示。
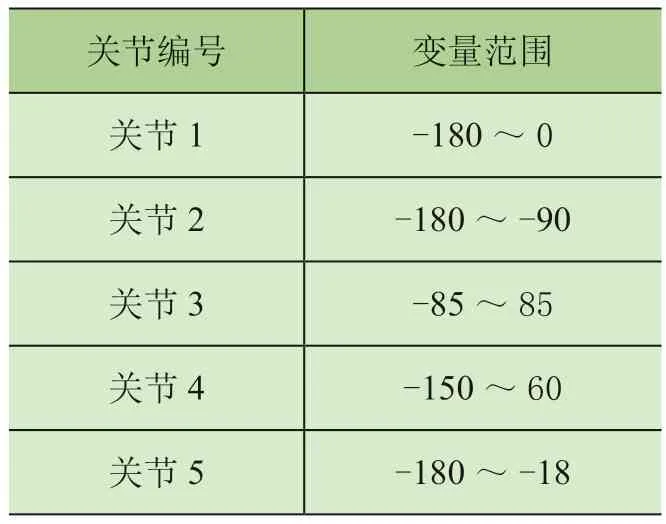
表1 各關節變量范圍 (°)
本文對裝填機械手的軌跡規劃是對該機械手末端執行器在運行過程中的軌跡規劃,不需要考慮末端執行器的抓、放以及推進。為了保證該裝填機械手運行的平穩性,即機械手各關節位移連續,各關節速度和加速度平滑且沒有突變,需要運用合適的方法對其速度和加速度進行規劃;為了實現該裝填機械手運行時間達到最優,需要以運行時間為優化目標結合智能算法來實現。
對裝填機械手進行軌跡規劃必須要知道裝填機械手的抓取位置和最終位置這2 個關鍵位置。該裝填機械手關鍵位置如圖2 所示。

圖2 關鍵位置示意圖
2 基本方法選擇
根據軌跡規劃所處空間的差異性,可把機械手軌跡規劃的方法劃分為關節空間軌跡規劃和笛卡兒空間軌跡規劃。
對于該裝填機械手而言,由于自由度相對較多,如果在笛卡兒空間進行軌跡規劃,運算量會很大,可能導致控制間隔較長,也會使得控制過程復雜程度高。而在關節空間軌跡規劃計算簡單且不會發生機構的奇異性,故對于該機械手的軌跡規劃選擇在關節空間內進行。
考慮該裝填機械手運行要求,在軌跡規劃過程中需考慮減小各關節的沖擊。為減小各關節的沖擊,需保證該裝填機械手運行過程中速度、加速度不產生突變,故選擇七次多項式插值計算方法在關節空間對該機械手進行軌跡規劃。對于七次多項式插值來說,基本是在軌跡規劃過程中用到的最高項插值計算方法,因為隨著次數的增高,所得到的插值結果也會出現與原函數偏離的現象。
在使用七次多項式插值對該裝填機械手進行軌跡規劃時得到其位移表達式為
多項式系數滿足8 個約束條件
式中:θ0為取彈、取藥位置的關節角,θf為最終位置的關節角,為取彈、取藥位置的角速度,為最終位置的角速度,為取彈、取藥位置的角加速度,為最終位置的角加速度。
轉換為矩陣形式從而得到θ=Ma,計算出M-1即可求得各關節的位置,也就求出了末端執行器的運動軌跡方程。
3 改進免疫算法
3.1 免疫算法
為了實現該裝填機械手運行時間達到最優,需要以運行時間為優化目標結合智能算法來實現,文中基于免疫算法對該裝填機械手的軌跡進行規劃,使其運行時間達到最優。
免疫算法啟發于生物免疫學,其主要是通過對抗有害物質進化出相應的免疫系統,模仿了生物免疫系統中的免疫生成行為,即模擬了生物免疫系統抗原識別、選擇、突變、克隆等的行為,以合理提取疫苗為核心,該算法具有較強的全局搜索能力、多樣性、強魯棒性等特點,但是免疫算法也存在一些缺陷。在實際運用中,免疫算法變異方向通常具有隨機性,會在個體染色體上隨機選擇位置并將該位置的基因值進行隨機改變,可能會導致迭代速度比較慢,另外對于免疫算法相似度閾值通常設置為定值,相似度閾值的設置對該算法的性能有很大影響,如果相似度閾值設置得太小,會導致抗體群體過于分散,搜索效率低下;如果相似度閾值設置得太大,會導致抗體群體過于集中,可能會出現“早熟”的問題。
免疫算法的流程:
1)抗原識別 即了解該裝填機械手的運行軌跡,分析軌跡的可行性,提取先驗知識,構造親和度函數,制定約束條件。
2)產生初始群體 通過代碼把軌跡的可行解表示為求解空間的抗體,在該空間內隨機產生一個初始群體。
3)計算種群中每一個可行解的親和度。
4)判斷是否滿足終止條件 如果滿足終止條件,則可以終止算法并輸出結果;否則,需要繼續進行運算直到滿足終止條件為止。終止條件通常包括達到最大迭代次數、目標函數值不再變化或接近某個預定閾值等。
5)計算抗體濃度和激勵度。
6)進行免疫處理 包括免疫選擇(篩選高質量的抗體并使其活化)、克隆(復制活化抗體)、變異(對克隆后的副本進行變異操作,使其發生親和度突變)和克隆抑制(對變異結果進行選擇,保留親和度高的抗體)。
7)種群刷新 用隨機生成的新抗體代替激勵度較低的抗體,形成新群體,繼續計算每一個可行解的親和度,并不斷循環該操作,直至滿足終止條件輸出結果。

圖3 免疫算法流程圖
3.2 免疫算法的改進
針對免疫算法變異方向的隨機性以及相似度閾值為定值這2點所引起的算法性能較低,本文做出了如下改進。
1)改進1 基于變異方向的改進,改進前免疫方向隨機,改進過后使得變異朝著最優粒子方向變異,增大了優質粒子的生成概率,提升了前期迭代速度。
改進前的公式為
改進后的公式為
式中:rand為[0,1]中的隨機數。
通過對比改進前后,粒子向著最優粒子方向靠近的速度,對比如圖4 所示,可以明顯看出改進后的粒子向著最優粒子靠近的速度更快。
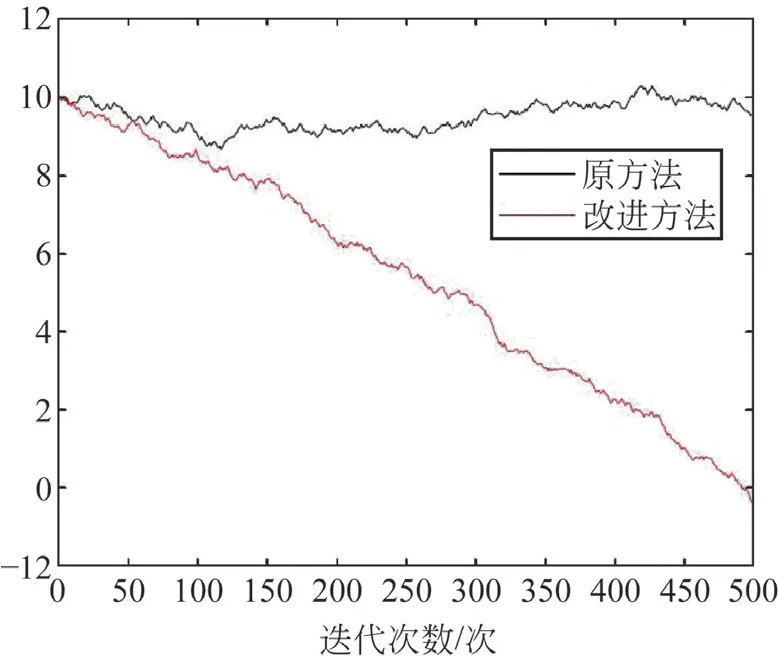
圖4 改進變異方向前后對比
2)改進2 基于相似度閾值的改進,改進前相似度閾值為定值,改進后變為隨迭代次數而改變。改進后的相似度閾值隨著迭代次數的增加而減小,前期可以保證粒子種類的多樣性,避免“早熟”,后期可以保證尋找收斂的快速性,提高尋優能力。
改進后的公式為
教師的招聘、培訓、教學基金、教學風格、教學效果、服務的研究;美國藥學院校教師素質與院長學術概況;藥學院的教師工作量;美國藥學院校教師的種族與民族表征;使用社交媒體平臺的新型教師發展計劃;促使教師使用以證據為基礎和以學生為中心的教學策略;指導非藥劑師教師參加藥房實習;在各醫療衛生專業培訓計劃中教師跨職業教育(IPE)面臨的益處和挑戰;教師發表的學術著作的數量及其潛在的影響;學生對教師聘任過程的看法,對教師的滿意度及評價。近年來的研究趨勢是鼓勵藥學生成為高素質的教師,進行學術研究以及推動教師的全面發展。
式中:exp 表示e的次方,如exp(a)表示e的a次方。
改進后的相似度閾值變化曲線如圖5 所示。可以看出在迭代初期采用了較大閾值,這樣會增加粒子的多樣性,而隨著迭代次數的增加,相似度閾值變小,這樣就會增加尋找最優粒子的速度。改進后的免疫算法將實現對該裝填機械手運行時間最優的。

圖5 改進后相似度閾值變化曲線
4 仿真結果及分析
軌跡規劃是在對該裝填機械手運動學分析的基礎上完成的,本章軌跡規劃是對該裝填機械手從取彈、取藥位置到最終位置過程中末端執行器的運動軌跡進行規劃,根據該裝填機械手的工作流程安排,明確該裝填機械手末端執行器在取彈、取藥位置和最終位置時的位姿。
由于該裝填關節2 仰起是一個單一的過程,所以在對該自動裝填機械手的軌跡規劃初位置是該機械手關節2 仰起以后的位置,關節2 先仰起是為了防止在機械手運行過程與藥筒產生干涉或碰撞。
軌跡規劃初位置各關節角度為:關節1:θ1=0°;關節2:θ2=-144.7°;關節3:θ3=-51.58°;關節4:θ4=43.2°;關節5:θ5=0°。
軌跡規劃最終位置各關節角度:關節1:θ1=-180°;關節2:θ2=-144.7°;關節3:θ3=41.4°;關節4:θ4=-133°;關節5:θ5=180°。
用改進前與改進后的免疫算法分別對該自動裝填機械手進行時間最優軌跡規劃,通過仿真實驗得到對比圖如圖6 所示。
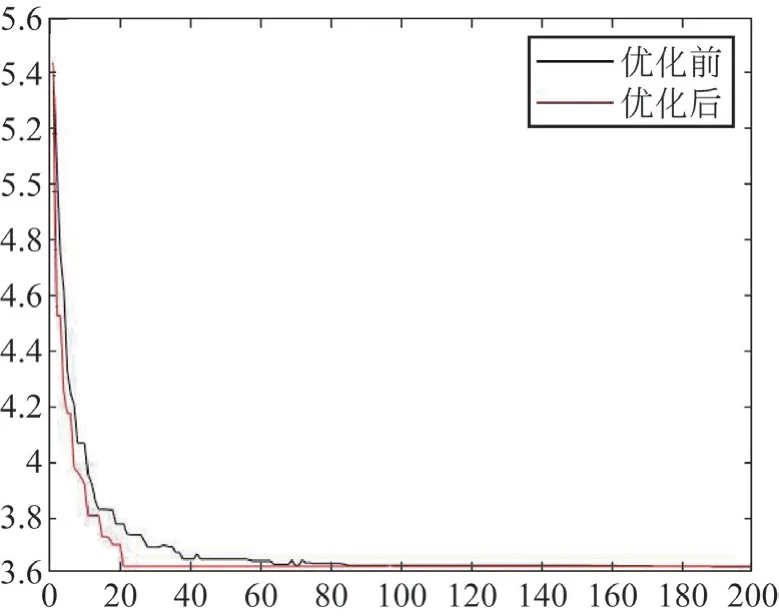
圖6 算法改進前后對比圖
可以看出改進后的免疫算法要優于改進前的免疫算法,改進后的算法向著最優粒子靠近的速度更快,效率更高,性能更好。
基于改進后的免疫算法結合七次多項式插值計算方法對該自動裝填機械手進行軌跡規劃,通過仿真實驗得到該機械手各關節位移、速度、加速度隨時間變化的曲線如圖7 所示。

圖7 優化后關節運動軌跡
由所得的曲線可以看出該裝填機械手的位移連續且滿足該機械手的運行要求,該機械手各關節速度及加速度均不超過關節最大允許量。
該裝填機械手在運動學約束滿足的前提下,基于改進過后的免疫算法結合七次多項式插值計算方法對該機械手的運行軌跡進行規劃,完成規劃過程所用的時間從5.51 s 減少到3.703 s,使該機械手在整個工作過程中時間縮短。縮短了該裝填機械手的運行時間,提高了該裝填機械手的工作效率,驗證了基于改進免疫算法的時間最優裝填機械手軌跡規劃方法的可行性與高效性。最后得到該裝填機械手在三維空間內的末端執行器的運動軌跡如圖8 所示。
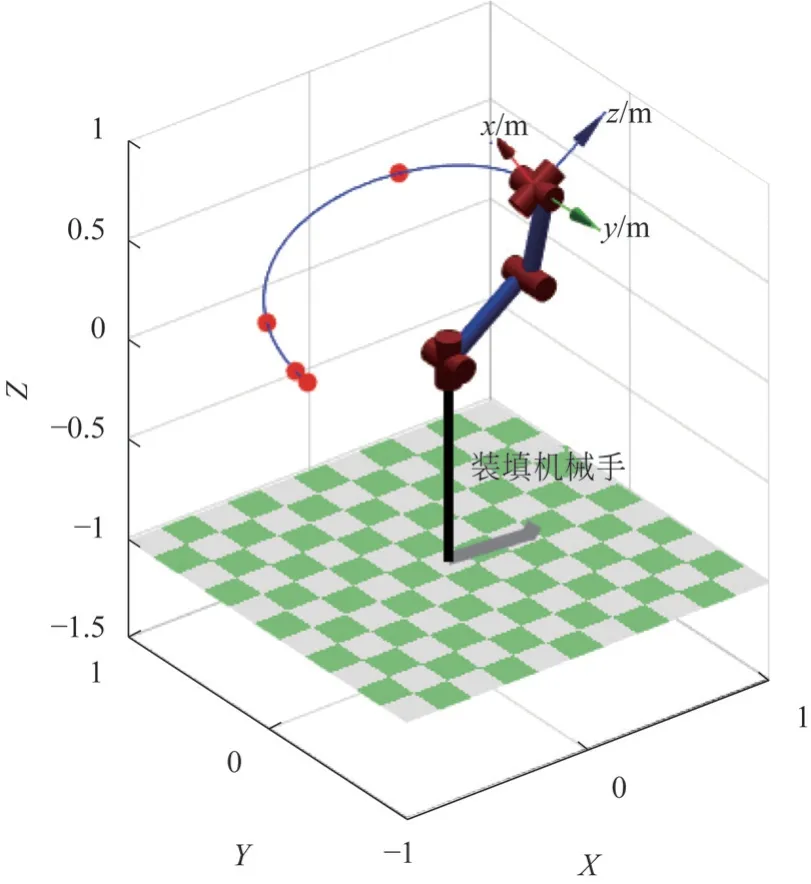
圖8 裝填機械手運動軌跡
5 結論
針對自主設計的自動裝填機械手軌跡規劃問題,以運行時間為優化目標提出一種改進的免疫算法,并基于改免疫算法結合七次多項式插值計算方法對該自動裝填機械手進行軌跡規劃,結合Matlab 仿真實驗得到以下結論。
針對免疫算法方向變異的隨機性和相似度閾值為定值引起的弊端,文中做出2 點改進。基于變異方向的改進使變異朝著最優粒子方向變異和基于相似度閾值改進使其隨著迭代次數的增加而減小,使該算法向著最優粒子靠近的速度更快,效率更高,提高了算法的性能;以自主設計的自動裝填機械手關節動作最優時間為優化目標,仿真結果顯示優化前后時間縮短了32.79%,提高了機械手的運行效率,驗證了算法的有效性。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
