基于ADRC的無人機吊掛飛行系統減擺控制設計
2023-09-18 21:59:43劉肩山唐毅謝志明
現代信息科技 2023年15期
劉肩山 唐毅 謝志明

摘? 要:針對無人機吊掛飛行系統欠驅動、強耦合、內擾和外擾等帶來的位置控制和負載減擺控制難的問題,設計了一種線性自抗擾控制策略,實現了無人機位置的精確控制和吊掛負載的減擺控制。首先,基于拉格朗日力學,建立了系統的動力學模型;其次,設計了擴張狀態觀測器對系統的總擾動進行觀測,并通過反饋補償對總擾動進行抑制;然后,設計了狀態反饋控制器對系統進行位置控制和負載擺角抑制;最后進行了仿真試驗,結果表明,設計的控制器相較線性二次調節器具有更強的魯棒性、更好的抗擾性和動態性能。
關鍵詞:線性自抗擾控制;擴張狀態觀測器;減擺控制
中圖分類號:TP273+.1 文獻標識碼:A? 文章編號:2096-4706(2023)15-0179-05
Design of Anti Swing Control for UAV Suspension Flight System Based on ADRC
LIU Jianshan, TANG Yi, XIE Zhiming
(Changsha Aeronautical Vocational and Technical College, Changsha? 410124, China)
Abstract: Aiming at the problem that underactuated feature, strong coupling, internal and external disturbances of an Unmanned Aerial Vehicle (UAV) with a slung-load flight system causes the difficulty of position control and anti-swing control of slung-load, a Linear Active Disturbance Rejection Control (LADRC) strategy is designed, which achieves accurate position control of UAV and slung-load swing suppression. Firstly, the dynamic model is built based on Lagrangian Mechanics. Secondly, this paper designs an Extended State Observer (ESO) to observe the total disturbance and suppresses it by feedback compensa-tion. Then, state feedback controller is designed to control the position of system and suppress the slung-load swing. Finally, simulation experiment is conducted, and the results show that the designed controller has better robust-ness, immunity and dynamic performance compared with the LQR controller.
Keywords: LADRC; ESO; anti-swing control
0? 引? 言
無人機作為一個理想的作業平臺,采用吊掛飛行進行物流運輸,不需要考慮吊掛物外形的影響;且不受當地交通狀況、地理條件的制約,操作簡單易上手、機動性強,可以在其他運輸工具難以到達的地方,快速、高效地開展物資運輸投放作業。因此,利用無人機進行吊掛飛行日益得到國內外研究人員的廣泛關注。
無人機吊掛飛行的研究最早是在無人直升機平臺上開展的,后面隨著多旋翼無人機技術的發展,其作為研究平臺被越來越多的研究者所青睞。多旋翼無人機吊掛飛行控制方法主要分為線性控制方法和非線性控制方法。線性控制方法主要有PID控制和LQR(線性二次型調節器)控制,如文獻[1]在實驗中使用PID作為基準控制器和提出的主動模型控制方法進行效果對比;文獻[2]針對無人機吊掛飛行系統設計了自適應非線性控制器,在仿真中使用了LQR控制器進行控制效果對比,以驗證算法的有效性。非線性控制方法有反饋線性化、反步法、幾何控制、自抗擾控制等方法。一些研究人員,對傳統的控制方法進行改進,提出了固定時間控制方法,保證狀態誤差在有限的時間內收斂[3];還有一些學者采用了智能控制方法,如文獻[4]采用增強學習算法來增強無人機吊掛飛行系統的魯棒性,使得無人機能自主規劃路徑并投遞貨物。
目前關于無人機吊掛飛行系統的控制方法大多依賴精確的數學模型,一些控制方法有效的前提是對模型進行線性化處理、對被控對象的動態特性進行簡化,且部分控制方法并未綜合考慮被控模型的內擾和外擾,導致魯棒性不強。
自抗擾控制(Active Disturbance Rejection Controller, ADRC)以韓京清先生于1989年站在工程實踐的角度對控制理論的思考為起點[5],跳出數學模型的約束,將被控對象存在的耦合、內擾和外擾等直接視為總擾動,設計擴張觀測器對其進行觀測,并在控制器中對總擾動的影響進行動態的補償和抑制,從而將系統簡化為積分串聯型,具有結構簡單、不依賴于模型、控制效果好、魯棒性強等優點[6,7]。不過傳統非線性ADRC需要整定的參數過多,調試起來反而沒有PID容易,因此,高志強提出了線性自抗擾控制器(Linear active disturbance rejection control, LADRC),將控制器和擴張觀測器參數調節簡化為帶寬調節,拓展了ADRC在工程領域的應用[8],受此啟發,文獻[9]使用LQR調節LADRC的參數,設計的控制方法的魯棒性比PID和滑模控制要強。
本文研究多旋翼無人機吊掛系統二維動力學模型,針對未建模項、負載質量變化、風擾和空氣阻力等因素對吊掛飛行的影響,設計了線性自抗擾控制器對無人機位置和吊掛負載的擺角進行控制[10]。最后進行了仿真實驗,并與LQR控制器的控制效果進行了對比,驗證設計的控制器的抗擾性能和魯棒性。
1? 系統模型分析
四旋翼無人機吊掛飛行系統的結構如圖1所示。圖1(a)中小球為吊掛負載,通過細繩系在無人機底部平板上,圖1(b)為其對應的2維平面模型。
圖1(b)中,oi xi zi 表示慣性坐標系,ob xb zb 表示無人機的機體坐標系,f表示無人機4個旋翼產生的總升力,mq和ml分別表示無人機和負載的質量,l表示細繩的長度,γ表示負載和豎直方向的擺角,θ表示無人機的俯仰角。為了建立系統的動力學模型,做出如下合理假設:
1)無人機為均勻對稱的剛體。
2)吊掛負載可以看作質點,且吊掛點和無人機的質心重合。
3)吊掛細繩質量忽略不計,不可拉伸,且始終是張緊的。
4)吊掛負載始終在無人機的下方,即吊掛負載的擺角-π/2<γ<π/2,且-π/2<γ - θ<π/2。
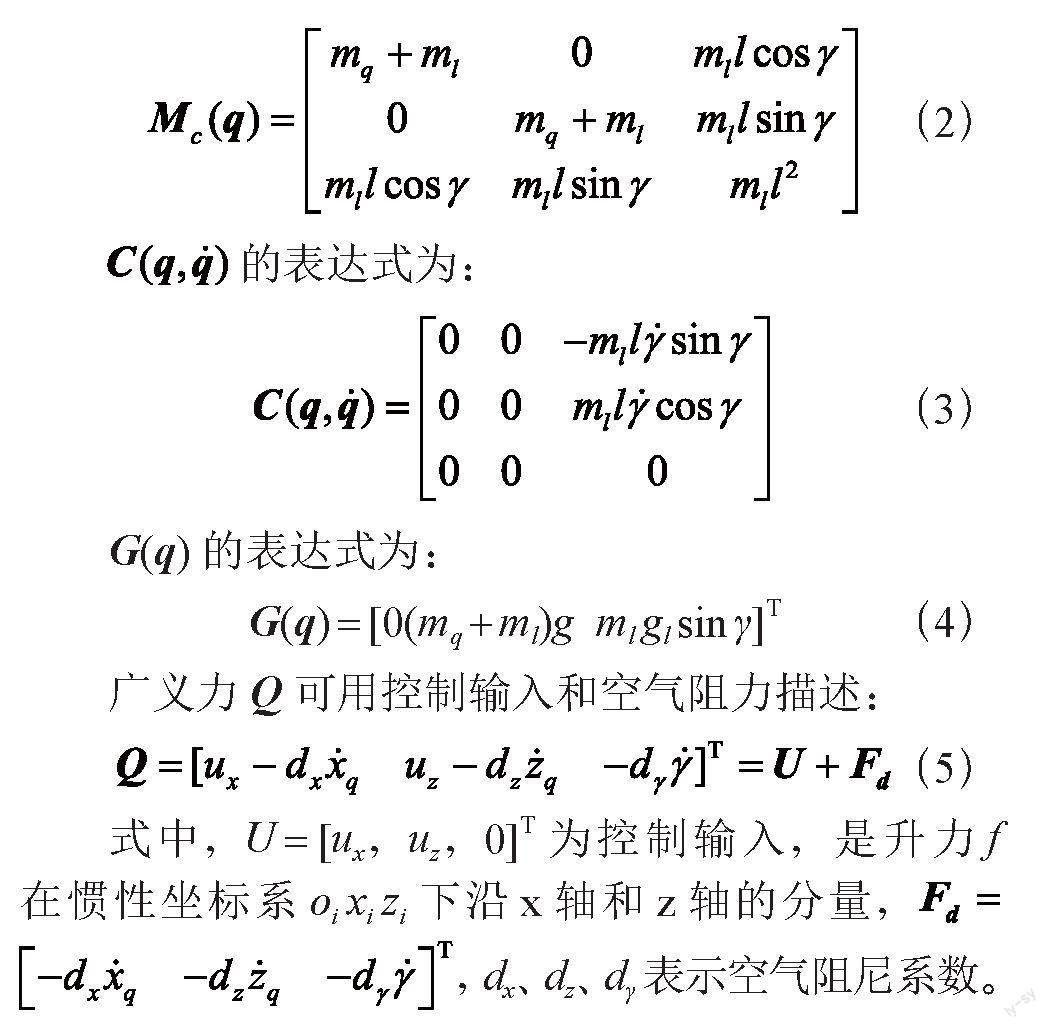
由于采用矢量力學方法對無人機吊掛系統進行建模過程煩瑣,這里采用拉格朗日力學方法建立系統的動力學模型:
式中,q = [xq,zq,γ]T,Mc(q)的表達式為:
本文的研究目標是保證無人機在慣性坐標系xi和zi方向上運動到目標位置,同時吊掛負載擺角收斂到0,可用下述數學語言描述:
式中,xqd和zqd表示無人機在慣性坐標系下的期望位置。
2? 控制器設計
自抗擾控制的核心思想是設計擴張狀態觀測器估計系統動態中的總擾動,并對總擾動進行動態補償,將控制對象線性化為“積分串聯”標準型系統。
由式(2)可知,Mc(q)的行列式大于0,所以Mc(q)表示對稱的正定矩陣,另外由于Mc(q)、 和G(q)表示非定常矩陣,均含有狀態變量γ,且Fd未知,則式(1)可寫成:
其中,Mc0表示Mc(q)-1的標稱值,Fu表示總擾動,其表達式為:
針對動力學模型(7),采用自抗擾控制技術,設計如下三階擴張狀態觀測器:
其中,ωox、ωoz和ωoγ分別表示擴張狀態觀測器在位置x、位置z和擺角γ通道的帶寬。
其中,qd = [xqd,zqd,γd]T表示無人機位置x、位置z和吊掛負載擺角γ的期望值組成的列向量,Kp和Kd的表達式如下:
式中,ωcx、ωcz和ωcγ分別表示控制器在位置x、位置z和擺角γ通道的帶寬。
3? 仿真實驗
為了驗證自抗擾控制器對無人機吊掛飛行系統的控制效果,根據上面建立的動力學模型進行建模仿真,為了對比LADRC控制器和LQR控制器的抗擾效果,在仿真的第12 s沿慣性坐標系下x軸和z軸方向給無人機各施加了持續1 s的大小為3 N的干擾,在仿真的第20 s至25 s模擬了吊掛負載質量持續減少一半的控制效果。四旋翼無人機吊掛系統的參數為mq = 1.008 2 kg、ml = 0.076 kg、l = 1.085 m、g = 9.81 m/s2。設定吊掛飛行系統的初始位置為:xq0 =?1.5 m、zq0 = 1.5 m,目標位置為:xqd = -1.5 m、zqd = 3 m。
本文設計的自抗擾控制器的相關參數為:ωox = 80,ωoz = 80,ωoγ = 500,ωcx = 1.5,ωcz = 1.5,ωcγ = 0.2。另外,為了更好地驗證自抗擾控制器的控制效果,本文選擇和LQR控制器進行對比,用于對比的LQR控制器參數是通過對系統在平衡點處進行線性化處理后借助MATLAB中Simulink的Linear Analysis Tool求得。本文定義被控量到達期望值并保持在±5%誤差內時,系統進入穩態,調節時間則為被控量到達穩態所需的最短時間。
圖2描述了LADRC控制器和LQR控制器下無人機位置及負載擺角隨時間變化的情況。在施加外部干擾力之前,通過對圖2的動態過程進行具體分析,可得LADRC和LQR控制器調節時間對比結果,如表1所示。由圖2及表1可知,在LADRC控制器下,無人機的位置xq(t)、zq(t)以及負載擺角γ(t)的調節時間小于LQR控制器。對于負載擺角γ(t),LADRC控制器的最大振幅比LQR控制器大到10?左右,但是LADRC控制器比LQR控制器的收斂速度快。施加外部干擾力后,LADRC控制器下,無人機位置幾乎不受影響,負載擺角出現了微小的波動,其最大偏差為1.8?;相較于LADRC控制器,LQR控制器表現不佳,無人機位置和負載擺角均收到了較大的干擾,其中無人機位置xq(t)和zq(t)的最大偏差分別為1.07 m和1.1 m,負載擺角γ(t)出現了較長時間和較大幅度的振蕩,最大偏差達到了18.4?,且在外力干擾消失4.6 s后才重新進入到穩態。吊掛負載質量發生變化后,LADRC控制器下,無人機位置和負載擺角不受吊掛負載質量變化帶來的影響,依舊維持在穩態;在LQR控制器下,無人機位置xq(t)和負載擺角γ(t)不受影響,但是無人機位置zq(t)有0.37 m的穩態誤差。
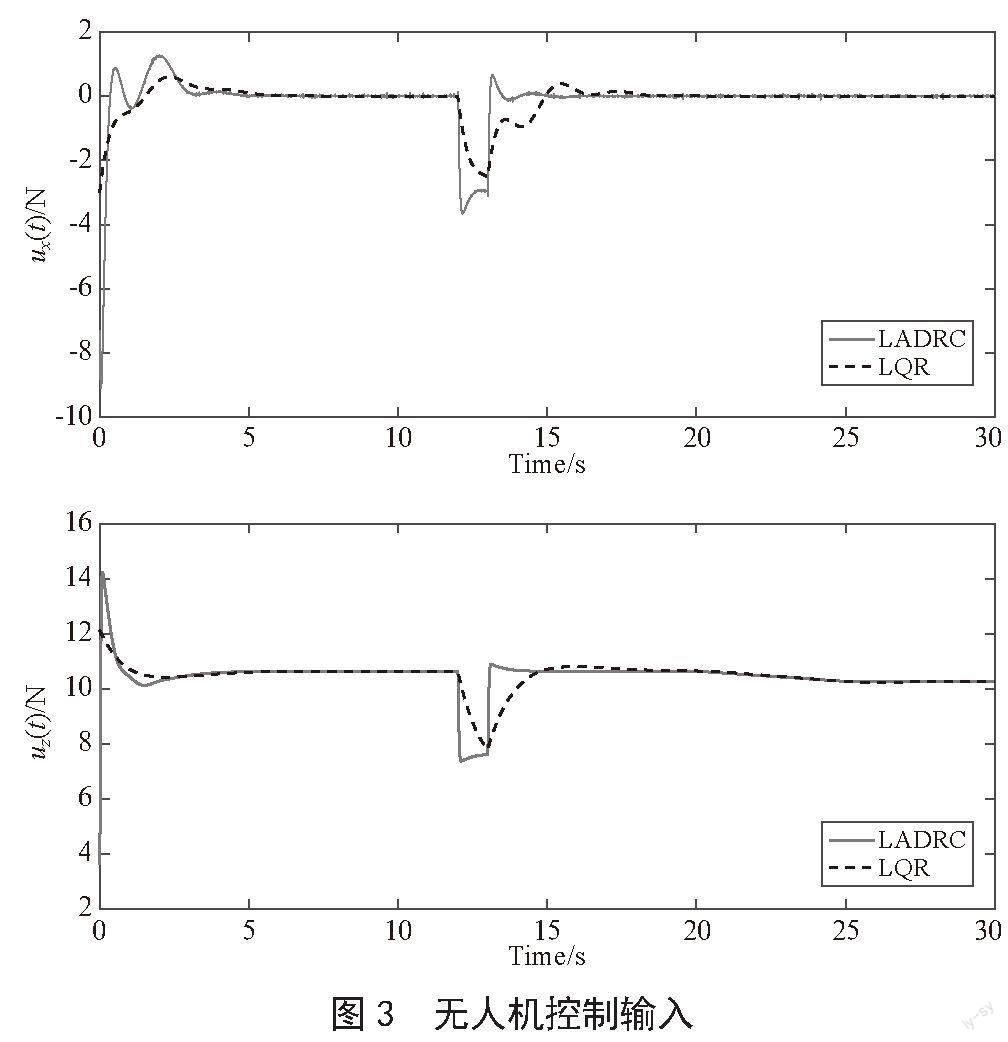
圖3描述了無人機在LADRC和LQR控制器下的控制輸入隨時間變化的情況,由于無人機z方向的目標位置比起始位置高,兩種控制器下的uz(t)在動態調節過程的前半部分有一個峰值,且LQR控制器的峰值要比LADRC控制器小,說明在z方向所需升力,LQR控制器比LADRC控制器小,但后半部分,LADRC控制器衰減速度比LQR控制器要快。對于控制器輸入uz(t),LADRC控制器的振蕩次數比LQR控制器多,而且LADRC控制器的振幅要比LQR控制器大,進入到穩態過程后,LADRC控制器下的x方向仍有小幅度的輸入,在圖中表現為有細微的毛刺,但LQR控制器則平穩的多,這是因為無人機進入到懸停狀態后,無人機處于平衡狀態,動力學模型線性化較準確,作為最優控制器的LQR控制器能發揮出較好的效果。施加干擾力后,LADRC和LQR控制器的輸入都作出了回應,在干擾力消失后,LADRC控制器的輸入能迅速回到穩態時的輸入狀態,而LQR控制器的輸入則是緩慢地回到穩態輸入,表現為較大的滯后。當吊掛負載質量隨時間變化時,兩種控制器的z方向的輸入均同步跟隨吊掛負載質量變化。
綜上,LADRC控制器的動態過程收斂速度快,振動幅度較快實現衰減,同時在抗干擾方面表現優異,能很好地抑制無人機吊掛系統外部擾動和內部擾動對系統的影響。
4? 結? 論
本文基于拉格朗日力學分析方法,為無人機吊掛飛行系統建立了動力學模型,并設計了線性自抗擾控制器,該控制器能在線對系統外擾和內擾進行觀測、補償和抑制,實現無人機吊掛飛行系統的位置控制并具有較好的減擺效果。仿真實驗表明,本文設計的LADRC控制器具有比LQR控制器更好的抗擾性、更強的魯棒性和更快的減擺作用,下一步將考慮在Pixhawk飛控中測試實際飛行控制效果。
參考文獻:
[1] YI K,LIANG X,HE Y,et al. Active-model-based control for the quadro-tor carrying a changed slung load [J].Electronics,2019,8(4):461.
[2] 王詩章,鮮斌,楊森.無人機吊掛飛行系統的減擺控制設計 [J].自動化學報,2018,44(10):1771-1780.
[3] 劉亞,黃攀峰,張帆.多無人機繩索懸掛協同搬運固定時間控制 [J].導航定位與授時,2021,8(1):21-30.
[4] FAUST A,PALUNKO I,CRUZ P,et al. Automated aerial suspended cargo de-livery through reinforcement learning [J].Artificial Intelligence,2014,247:381-398.
[5] 韓京清.控制理論——模型論還是控制論 [J].系統科學與數學,1989(4):328-335.
[6] XIAO Y G,TONG J H. Active Disturbance Rejection Control of Quadrotor UAVs Based on Joint Observation and Feedforward Compensation [J].Applied Ma-thematics and Mechanics,2023,44(3):229-240.
[7] HAN X,TOMITA K,KAMIMURA A. Reduced-Order Active Disturbance Rejection Control Scheme for a Quadrotor and Its Autotuning Method [C]//2022 61st Annual Conference of the Society of Instrument and Control Engineers.Tokyo:IEEE,2022:1151-1157.
[8] GAO Z Q. Scaling and bandwidth-parameterization based controller tuning [C]//Proceedings of 2003 American Control Conference. Denver:IEEE.2003:4989-4996.
[9] SUHAIL S A,BAZAZ M A,HUSSAIN S. Optimal Tuning Based Linear Active Disturbance Rejection Control Applied to a Quadcopter [C]//2022 Interna-tional Conference for Advancement in Technology (ICONAT).Goa:IEEE,2022:1-5.
[10] 于坤林,謝志明,劉肩山.基于機器視覺的植保無人機自主著陸技術研究 [J].現代信息科技,2021,5(11):48-51.