基于HDBSCAN 算法的LiDAR 建筑點云自動提取研究
2023-09-18 10:19:48淦立琴
科技創(chuàng)新與應(yīng)用 2023年26期
關(guān)鍵詞:分類
淦立琴
(1.廣州市城市規(guī)劃勘測設(shè)計研究院,廣州 510060;2.廣州市資源規(guī)劃和海洋科技協(xié)同創(chuàng)新中心,廣州 510060;3.廣東省城市感知與監(jiān)測預(yù)警企業(yè)重點實驗室,廣州 510060)
激光雷達(Light Detection And Ranging,LiDAR)是一種可以安裝在不同遙感平臺上的激光探測、測距和定位系統(tǒng)。其集激光測距、慣性測量、高精度定位等技術(shù)于一體,通過記錄單個激光信號從發(fā)射到接收被地物反射的能量所歷經(jīng)的時間,并根據(jù)信號發(fā)出瞬間由定位定姿系統(tǒng)(Position and Orientation System,POS)測定激光掃描系統(tǒng)的位置和姿態(tài),計算出地物目標(biāo)的三維坐標(biāo),并繪制地形圖[1]。與常規(guī)攝影測量、傳統(tǒng)的激光測距技術(shù)和遙感技術(shù)相比,LiDAR 技術(shù)是一種新的獲取高分辨率三維地球空間信息的手段,其優(yōu)點是受天氣影響小、抗干擾性強、采集速度快和幾何精度高[2]。
近年來,LiDAR 技術(shù)在生物量估計[3]、水下地形探測[4]和建筑三維建模[5]等方面具有廣泛的應(yīng)用。尤其在建筑物提取和三維建模方面,LiDAR 相較于傳統(tǒng)技術(shù),有著巨大的優(yōu)勢。在對建筑物提取的算法中,最主要的問題為激光點云分類問題,王刃等[6]利用點云的相鄰點關(guān)系和點密度估計,從點云數(shù)據(jù)生成的數(shù)字地表模型(Digital Surface Model,DSM)中,直接分類出建筑表面點云; 李亮等[7]利用點云構(gòu)成的法向量特征和連通成分分析方法區(qū)分墻面點和建筑點,并結(jié)合數(shù)字高程模型(Digital Elevation Model,DEM)獲取建筑屋頂點云。本文提出一種簡單高效的方法,利用CSF 點云濾波方法進行地面和地上點云分離,采用HDBSCAN 聚類算法對地上點云進行密度聚類分割,最后設(shè)定高程閾值提取建筑物點云。
1 數(shù)據(jù)及預(yù)處理
本文選用的點云數(shù)據(jù)來自https://portal.opentopography.org/datasets。該網(wǎng)站提供免費高質(zhì)量的機載點云數(shù)據(jù)集。所選的點云數(shù)據(jù)來自于數(shù)據(jù)集Oregon Department of Geology and Mineral Industries Lidar Program Data。該數(shù)據(jù)為機載激光雷達數(shù)據(jù),點云密度為10.30 pts/m2,點云數(shù)量共計約390 000。場景中包括街道、灌木、樹木和房屋(圖1)。
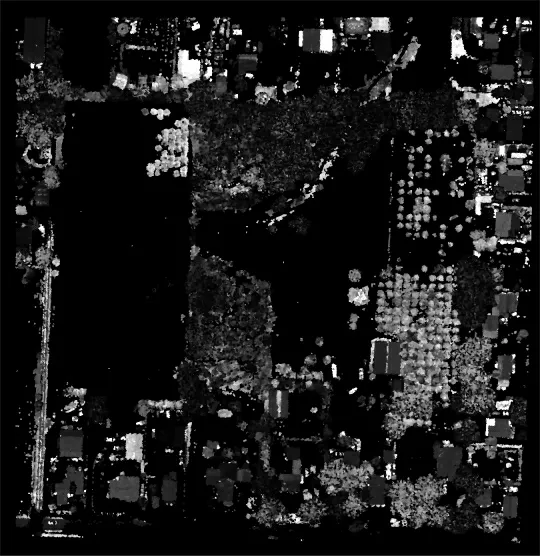
圖1 原始點云數(shù)據(jù)圖
由于受測量設(shè)備、天氣等其他因素影響,點云數(shù)據(jù)在測量獲取過程中會產(chǎn)生很多噪聲。噪聲會對實體形狀的提取產(chǎn)生干擾,構(gòu)造出來的實體形狀與原實體會存在一定差距。因此,為降低噪聲對結(jié)果的影響,有必要進行噪聲點云去除的預(yù)處理工作。使用CloudCompare 軟件的統(tǒng)計濾波器(Statistical Outlier Removal Filter,SOR filter)工具對原始點云數(shù)據(jù)進行去噪處理,去除明顯離群點。
2 研究方法
2.1 CSF 濾波
點云濾波是LiDAR 點云應(yīng)用中基礎(chǔ)和關(guān)鍵的一步,指的是將地面點云與地上點云分離,這一步驟將直接影響后續(xù)各種地物分割、分類和建模的精確度。現(xiàn)有研究已經(jīng)開發(fā)了許多濾波算法,不過大部分算法都需要設(shè)置一些復(fù)雜的參數(shù)才能達到較好的效果,尤其是對于不同的場景如城區(qū)和山區(qū),參數(shù)設(shè)定差異較大。復(fù)雜多變的調(diào)參過程提高了用戶使用的門檻。布料濾波[8](Cloth Simulation Filtering,CSF)的設(shè)計思路則非常巧妙,促進了點云地面濾波算法易用性、通用性的提升。CSF 濾波算法假設(shè)有一塊虛擬的布料因重力作用落在地形表面上,假設(shè)布料足夠柔軟,能緊密貼附在地形上,隨地形起伏,此時布料的形狀即為DSM。當(dāng)將地形翻轉(zhuǎn),落于表面的布料形狀即為DEM。CSF 濾波具體實現(xiàn)包括:首先對LiDAR 點云進行翻轉(zhuǎn);再用剛性布料覆蓋翻轉(zhuǎn)后的表面,分析布料的各個節(jié)點與對應(yīng)點云之間的相互作用,確定節(jié)點的位置,從而產(chǎn)生布料曲面近似表示地表形狀;最后,比較原始點云和布料曲面之間的距離,實現(xiàn)從點云中過濾地面點的作用。
2.2 基于HDBSCAN 的建筑點云提取
2.2.1 HDBSCAN 算法
HDBSCAN (Hierarchical Density-Based Spatial Clustering of Applications with Noise) 是由Campello等[9]提出的一種基于密度的空間數(shù)據(jù)聚類方法,是常用聚類方法DBSCAN 和層次聚類的一個結(jié)合,其基本原理是通過計算相鄰點與核心點的可達距離,構(gòu)建互達圖,最后引入層次聚類和聚類樹壓縮,獲得最終聚類簇。HDBSCAN 不需要用戶預(yù)先確定簇的數(shù)量或簇內(nèi)點周圍的距離閾值,并且可達距離的設(shè)計能有效應(yīng)對不同密度距離簇,生成基于密度聚類的層次結(jié)構(gòu),從而更有效地提取不連續(xù)性。兩點之間的互可達距離如式(1)。本文使用Python 的hdbscan 第三方庫進行點云數(shù)據(jù)聚類編程。
式中:d(p,q)表示p、q 兩點之間的距離,核心距離ck(p)=d(p,Nk(p))值表示核心點p 和第k 個鄰近點之間的距離。
2.2.2 基于HDBSCAN 的點云聚類
HDBSCAN 聚類方法將所有的點云分為163 個簇,即將其分割成為163 個單一分離對象。為了進一步辨別各聚類簇的具體類型,將所有的簇按照高程的大小重新排列(圖2)。因為激光雷達具有較強穿透性,所以用每一簇高程的最大值作為其標(biāo)簽來反映地物的類型。

圖2 HDBSCAN 聚類簇內(nèi)高程最大值和方差
從圖2 可以直觀看出,所有簇中,高程最高為480m,最低接近200 m。不同聚類分割的對象在高程上存在顯著差異,且方差和最大值的整體趨勢與拐點保持基于一致,表現(xiàn)為在高程最大值地區(qū),其高程的方差隨之增大,這與實際情況中樹木高程高于房屋但其離散程度高相符,說明在聚類的過程中基本將同屬性的地物聚為一簇。
2.2.3 基于高程閾值的建筑分類
為了進一步分割開喬木、房屋與灌木,通過簇的高程經(jīng)驗閾值對其進行分類。由于不同地區(qū)基礎(chǔ)海拔不同,所以難以通過通用閾值選定。在實際觀察數(shù)據(jù)后選擇具體的經(jīng)驗閾值對其進行分割(表1)。其中低矮灌木的方差在0~1 m2之間,其海拔的最大值為340~350 m;房屋的高度方差在1~350 m2,其海拔的最大值為351~389 m;喬木的高度方差大于350 m2,其海拔總體高于390 m。建筑和喬木最終提取結(jié)果分別如圖3 和圖4 所示,可以看出通過本方法較好地提取了房屋建筑形狀。
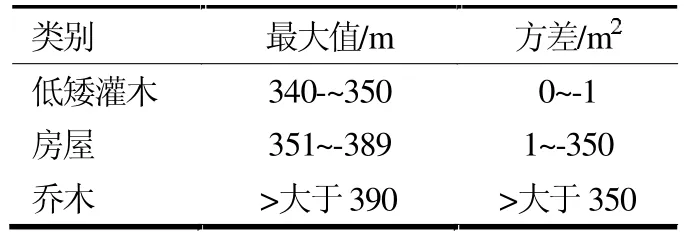
表1 高程經(jīng)驗閾值
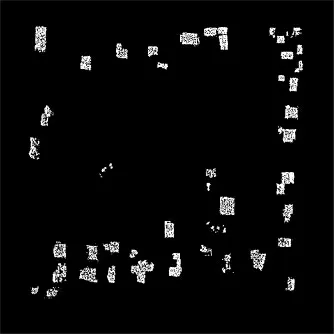
圖3 房屋建筑分類結(jié)果
圖4 喬木分類結(jié)果
3 結(jié)束語
本文基于高精度的激光雷達點云數(shù)據(jù),設(shè)計了一種簡單易執(zhí)行的建筑分類方法,利用HDBSCAN 算法進行聚類分割,再通過高程的經(jīng)驗閾值進行分類,無須先驗樣本信息,即可達到快速正確提取建筑點云的目的。后續(xù)研究可考慮將HDBSCAN 二維聚類算法提升至三維,結(jié)合面法向量多維信息,進一步提高地物分割和分類的精度和效率。
猜你喜歡
西北民族大學(xué)學(xué)報(自然科學(xué)版)(2021年4期)2021-12-29 02:54:24
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學(xué)生天地(2019年32期)2019-08-25 08:55:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數(shù)英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46