車載振動觀測方案對軌道不平順識別效果影響研究
2023-09-25 13:10:38張宇軒李奇吳閱石龍
鐵道科學與工程學報 2023年8期
張宇軒,李奇, ,吳閱,石龍
(1.同濟大學 土木工程學院,上海 200092;2.西藏農牧學院,西藏 林芝 860000;3.高速鐵路軌道技術國家重點實驗室,北京 100081;4.中國鐵道科學研究院 研究生部,北京 100081)
隨著我國軌道交通運營里程的不斷增長,軌道平順狀態(tài)監(jiān)測已成為保障行車安全性與舒適性的重要手段。傳統(tǒng)的人工靜態(tài)檢測方法效率低、成本高、間隔長,測量結果不能反應軌下結構動態(tài)變形。基于車載振動信號的軌道不平順動態(tài)檢測方法成為重要的監(jiān)測手段,其中,慣性基準法[1-3]在現代軌檢車中應用最廣泛。這一方法僅涉及軌道不平順與若干運動學信號之間的簡單數學關系,但由于信噪比較低[4]、對軌檢車車速要求高[5]以及傳感器工作環(huán)境惡劣[6-7]等不足,在實際應用中,往往需要通過拉伊達準則、EMD高通濾波[8]或小波變換[9]等方法對軌檢數據進行預處理。此外,軌道檢測車造價高、保有量低、監(jiān)測周期長,難以滿足軌道長期高密度監(jiān)測的需要。為此,運營列車的監(jiān)測潛力受到各國學者的重視與開發(fā),如何構建軌道不平順激勵與列車動力響應之間的輸入輸出關系也成為了研究重點。車輛動力系統(tǒng)通常被描述為MIMO(多輸入多輸出)模型,理論上可根據有限的觀測量實現系統(tǒng)狀態(tài)量與輸入量的估計。卡爾曼濾波算法就是一種能考慮模型參數的不確定性,根據觀測量對每一時間步的系統(tǒng)狀態(tài)和輸入進行最優(yōu)估計的算法。在軌道不平順識別的相關研究中,國內外學者普遍采用了卡爾曼濾波[10]或其衍生方法。早期的研究通常將簡化的車輛模型作為分析對象,如MEI 等[11]基于2 軸車輛模型,基于車體與輪對的橫向加速度、搖頭角速度等5個觀測量,實現了對軌道不平順、軌道曲線半徑等18 個狀態(tài)量的監(jiān)測。TSUNASHIMA 等[12]建立了6 自由度、4 自由度簡化車輛模型,由車體加速度響應識別軌道不平順。然而,軌道不平順對軌道動撓度的影響難以忽略[13],如需識別軌道的靜態(tài)不平順,則需要考慮這一影響,對時變的車軌系統(tǒng)整體進行分析。XIAO 等[14-15]建立了多跨簡支梁車橋耦合模型,實現了軌道豎向靜態(tài)不平順的識別,并分析了傳感器噪聲、車速、系統(tǒng)參數等多種不確定因素對識別效果的影響。公路路面不平順識別方面,MAKIHATA 等[16]借助無跡卡爾曼濾波算法,基于半車模型的車體振動響應識別了已知參數減速帶的國際不平整指數。ZHAO 等[17-18]利用遺傳算法建立了半車模型在頻域內的傳感器信號、車速與車輛響應之間的關系方程,并發(fā)展了利用擴增卡爾曼濾波算法識別公路路面不平順曲線的方法[19-20]。上述軌道不平順識別研究多基于理想化的車輛模型和觀測數據開展。但在工程實踐中,傳感器有效工作頻帶有限、信噪比不一,并且平動絕對位移難以測量、轉角位移測量精度較低,因此,這些方法距離實際應用尚有不小的差距。本文分析不同觀測方案對軌道不平順識別效果的影響,為傳感器的優(yōu)化布置及增強卡爾曼濾波識別算法的實用性提供參考。
1 車輛模型及其狀態(tài)空間方程
對于常見的旅客列車車輛,可以采用如圖1所示的豎向平面模型來建立軌道高低不平順與車輛振動響應的關系。基于這一模型,根據卡爾曼濾波方法估計得到的軌道不平順為動態(tài)不平順,包含了軌道靜態(tài)不平順與軌下結構動態(tài)變形。

圖1 豎向平面車輛模型(10自由度)Fig.1 Vertical plane vehicle model (10 degree of freedom)
這一模型考慮了車體的沉浮與點頭運動、前后構架的沉浮與點頭運動以及輪對沉浮,共計10個自由度。假設輪對與軌道間為線性接觸,輪軌力作為系統(tǒng)的外力作用于車輛模型,則該模型的運動微分方程可表示為:
式中:M,C,K分別為車輛模型的質量、阻尼與剛度矩陣;z為車輛模型的位移向量;Kh為接觸彈簧剛度矩陣;R為輪對行經位置的動態(tài)高低不平順向量,它是運行時間的函數。
通過卡爾曼濾波算法對系統(tǒng)動力特征進行估計時,首先需要通過狀態(tài)空間描述系統(tǒng)的動態(tài)特征,給出系統(tǒng)狀態(tài)變量、輸入量及輸出量三者之間的關系。令車輛系統(tǒng)的狀態(tài)空間向量為X=[z]T,觀測量為Y=[z]T,系統(tǒng)輸入量u=[0R]T。考慮到系統(tǒng)輸入量為軌道不平順,并假設其符合隨機游走模型[21],根據擴增卡爾曼濾波方法[22],將狀態(tài)空間向量擴增為Xa=[X u]T,整理車輛系統(tǒng)的狀態(tài)空間方程和測量方程,并以周期T0進行離散化[23],則車輛系統(tǒng)的狀態(tài)空間方程和測量方程可整理成如下形式:
其中:Ad為離散時間域內車輛系統(tǒng)的系統(tǒng)矩陣;Bd為系統(tǒng)的控制輸入矩陣;Hd為系統(tǒng)的輸出矩陣;Dd為系統(tǒng)的直接傳遞矩陣;wa與va分別為狀態(tài)空間方程與測量方程中的白噪聲項:
其中,Q與P分別為模型動力學參數與不平順的噪聲參數,可根據實際情況選取;R為測量方程的白噪聲參數,可由傳感器信號的實際白噪聲水平測得。
2 基于卡爾曼濾波方法的車輛狀態(tài)估計
在外荷載、觀測量及動力參數均已知的情況下,理論上可根據狀態(tài)空間方程與測量方程計算任意時刻的系統(tǒng)狀態(tài)空間。然而,實測觀測量總是包含一定的噪聲,且系統(tǒng)參數存在隨機性。根據擴增卡爾曼濾波算法[22],綜合考慮模型參數、傳感器噪聲與其他干擾項的概率分布信息后,離散化車輛系統(tǒng)第j步狀態(tài)量的最優(yōu)估計a+(j)據下式計算:
式(9)~式(13)即為基于卡爾曼濾波方法的車輛系統(tǒng)狀態(tài)最優(yōu)估計計算流程(如圖2所示)。

圖2 車輛系統(tǒng)卡爾曼濾波算法流程Fig.2 Process of Kalman filter in vehicle system model
3 識別結果中漂移成分的處理
基于理想化模型與觀測量的卡爾曼濾波方法的準確性已得到廣泛證明[14,19]。然而,現階段的傳感器無法對車輛結構的絕對位移進行直接觀測,車輛點頭運動相關的運動量等也難以實現高精度的測量。這些觀測量的缺失在實際的軌道不平順識別工作中會導致漂移現象,其產生原因與加速度信號數值積分時噪聲的影響有關[24]。減少漂移影響的措施有以下2種。
1) 增設位移觀測量,增加模型受到的力學約束。當整車發(fā)生剛性漂移時,軌道不平順的漂移滿足下式關系:
2) 對輪對與車體的獨立漂移成分進行處理。本文采用集合經驗模態(tài)分解(Ensemble Empirical Mode Decompsition,EEMD)方法[25]去除動態(tài)不平順識別結果中的漂移成分。為驗證這一方法的可行性,將一軌道靜態(tài)不平順樣本作用于車輛模型,計算車輛響應及軌道動態(tài)不平順,并將車輛響應作為輸入觀測變量,根據卡爾曼濾波方法估計軌道動態(tài)不平順。軌道不平順樣本通過三角級數法根據美國5級譜生成,滿足隨機游走模型,波長范圍取0.1~100 m。樣本及其差分概率密度分布圖如圖3所示。車輛模型參數如表1所示。
表1 10自由度獨立車輛模型具體參數Table 1 Parameters of vehicle model with 10 DOF

圖3 靜態(tài)不平順樣本及其差分的概率密度分布Fig.3 Static track irregularity sample and probability density distribution of its difference
觀測變量選擇車體、轉向架前后端豎向加速度、各轉向架與車體的相對位移共8個觀測量。動態(tài)不平順識別及去漂移處理結果如圖4 所示。可見,這一方法能夠有效處理識別結果中的漂移成分。

圖4 動態(tài)不平順漂移成分處理結果Fig.4 Estimations of dynamic track irregularity after drifting eliminating
4 觀測組合方案對軌道不平順識別的影響
4.1 觀測車輛加速度響應
實踐中最易取得的車輛響應為車輛加速度響應。選取表2 所列3 種加速度觀測組合,假定傳感器信噪比為15 dB。車輛模型參數與第3 節(jié)所述一致。

表2 獨立車輛模型的加速度觀測方案設計Table 2 Observation scheme of vehicle model acceleration
首先僅觀測車體中心處的豎向加速度(方案A1)。前后輪對的動態(tài)不平順識別效果如圖5(a)和5(b)所示。可見,動態(tài)不平順的識別結果發(fā)生了明顯的漂移,且不同輪對的識別結果未出現相對時滯。另外,動態(tài)不平順波動隨著時間出現了明顯的衰減。這是由于卡爾曼濾波算法為時間更新的估計,誤差協方差矩陣Mv(j)總體上會逐漸收斂[26],引起隨機游走過程Rv的估計的失真。因此,該觀測方案難以實際運用。

圖5 動態(tài)不平順識別結果(方案A1,A2)Fig.5 Estimations of dynamic track irregularity (Scheme A1,A2)
考慮車輛點頭運動,觀測車體前后端部處的豎向加速度(方案A2),識別效果如圖5(c)和5(d)所示。由于觀測量同樣未包括2個轉向架點頭角的位移、速度及加速度,因此仍然無法識別動態(tài)不平順時滯,且識別結果依然存在漂移與衰減失真。
在方案A2 的基礎上,加設2 個轉向架的前后端部豎向加速度觀測量(方案A3),識別效果如圖6所示。由圖6可見,漂移現象仍然存在,且傳感器布置數量與漂移量間沒有明確的單調關系,可認為加速度觀測量無法對位移量的漂移形成約束。但不平順識別結果未見明顯的衰減失真,經漂移成分處理后的識別結果仍有一定精度,如圖7所示。

圖6 動態(tài)不平順識別結果(方案A3)Fig.6 Estimations of dynamic track irregularity (Scheme A3)

圖7 動態(tài)不平順漂移成分處理結果(方案A3)Fig.7 Estimations of dynamic track irregularity after drifting eliminating (Scheme A3)
4.2 觀測車輛加速度與相對位移
選取表3 所列的3 種加速度與相對位移的觀測量組合,傳感器信噪比和車輛模型參數與上文一致。

表3 獨立車輛模型的加速度與相對位移觀測方案設計Table 3 Observation scheme of vehicle model acceleration and relative displacement
在方案A3 的基礎上,新增與轉向架與車體的相對位移觀測量(方案A4),識別結果已在第3節(jié)得出(圖4)。對比圖4與圖7可見,相對位移觀測量能夠實現長波不平順識別的優(yōu)化,但短波不平順識別效果略差。造成這一現象的原因是由于不平順-轉向架位移間的傳遞函數特性[27],相對位移觀測量與短波不平順間存在矛盾。
采用與慣性基準法相同的觀測量,即車體豎向加速度及其與轉向架的相對位移(方案A5),漂移項處理后的不平順識別效果如圖8 所示。可見,動態(tài)不平順的識別結果在高低頻處均存在較強的噪音,這是由于這一觀測思路只涉及幾何量的簡單疊加,不足以對獨立車輛模型產生足夠約束。

圖8 動態(tài)不平順漂移成分處理結果(方案 A5)Fig.8 Estimations of dynamic track irregularity after drifting eliminating (Scheme A5)
在方案A5 的基礎上,在前轉向架的前端增設一個豎向加速度測點(方案A6),識別結果如圖9所示。可見,這一方案對不平順長波成分的識別效果良好,總體上與真實值吻合,但短波成分的偏差仍然較大。該觀測方案僅包含3個觀測變量即可達成相對良好的識別效果,且觀測量均為車體與轉向架的狀態(tài)量,傳感器工作環(huán)境較好。若在工程實際中傳感器設置受限,或僅關心個別輪對動態(tài)不平順的長波成分,則該觀測方案仍然存在一定的實用性。
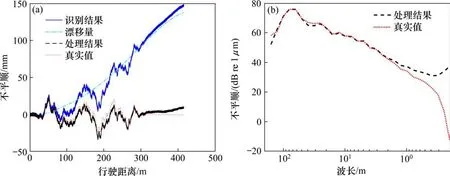
圖9 動態(tài)不平順漂移成分處理結果(方案A6)Fig.9 Estimations of dynamic track irregularity after drifting eliminating (Scheme A6)
4.3 觀測車輛加速度、相對位移與絕對位移
綜合A1~A6 方案可見,相對位移僅能約束識別結果中相對位移的漂移問題,而無法限制車輛整體發(fā)生絕對位移的漂移。本節(jié)考慮在方案A4 的基礎上增設車體豎向、點頭角絕對位移的理想觀測方案。識別結果如圖10 所示。從結果可見,絕對位移觀測量能夠完全限制車輛的剛體漂移,并且不平順的長波部分識別效果良好,且短波識別效果劣于A3和A4方案,原因與A4方案相同。
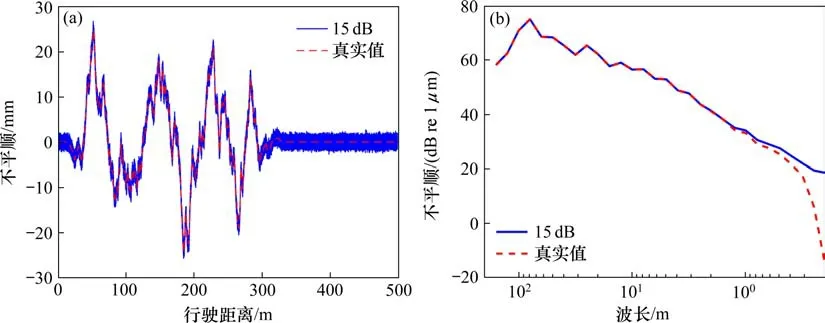
圖10 動態(tài)不平順識別結果(方案A7)Fig.10 Estimations of dynamic track irregularity (Scheme A7)
4.4 觀測組合方案評價
方案A3~A7 不平順識別結果的各波段識別效果評價如圖11所示,其中,“優(yōu)”、“中”、“差”分別表示表示該波段內不平順的1/3 倍頻程與真實值相差1 dB以內、1~2 dB和2 dB以上。可見,對漂移進行處理后,A3,A4 及A6 方案均能得到可用波段范圍大而連續(xù)的識別結果。且觀測變量越多,識別效果越好。另外,長波不平順的識別效果與觀測變量中位移項的數量呈正相關,而短波不平順的識別效果呈反相關。

圖11 工況A4~A7各波段識別效果評價Fig.11 Evaluations of effect of scheme A4~A7 on estimation of irregularity in wave band
5 軌道不平順識別效果影響因素分析
在實際的運營過程中,軌道不平順的識別效果受到眾多因素的影響。如載重變化、長期運營中造成的磨損等導致的車輛參數偏移、列車運行速度的變化以及傳感器工作環(huán)境的變化等。本節(jié)對這些客觀因素進行了模擬,分析其對軌道不平順識別效果的影響。觀測方案均選擇識別效果較好的A4方案。
5.1 結構參數影響
假設車體質量,一系、二系懸掛剛度及阻尼等結構參數存在±20%的偏差,識別效果如圖12所示。結果表明,車體質量偏差對識別效果影響較小,一系、二系懸掛剛度分別影響波長范圍1~4 m內與10 m左右不平順的識別效果,一系、二系懸掛阻尼分別影響波長1 m 左右與3 m 左右不平順的識別效果。

圖12 參數不同工況下各波段識別效果評價Fig.12 Evaluations of scheme with various parameters on estimation of irregularity in wave band
5.2 列車運行速度影響
考慮20,40,60 和80 km/h 4 種列車運行速度,觀測結果分別如圖13 所示。結果表明,車速較低時,波長范圍30 m左右(簡支梁跨徑)的軌道不平順識別效果較差,可認為低車速工況下簡支梁的動撓度無法反應到車輛響應中;隨著車速逐漸提高,長波部分識別效果未明顯變化,短波部分則逐漸變差。

圖13 車速不同工況下各波段識別效果評價Fig.13 Evaluations of scheme with various vehicle speeds on estimation of irregularity in wave band
5.3 傳感器噪聲影響
假設所有傳感器信噪比相同,并對每個傳感器采用不同的噪聲樣本,分別考慮信噪比為5,15和25 dB 3 種工況,觀測結果如圖14 所示。可見,較高的信噪比能夠擴展識別結果的有效波長范圍,而較低的信噪比會導致識別結果的明顯失真。

圖14 信噪比不同工況下各波段識別效果評價Fig.14 Evaluations of scheme with various SNRs on estimation of irregularity in wave band
6 結論
1) 對于具有10 個自由度的獨立車輛模型,采用1~2 個車輛振動響應觀測量的觀測方案對車輛各自由度的約束不足,基于卡爾曼濾波進行不平順識別將產生較大的識別誤差和漂移。
2) 實際應用中基于車輛振動響應和卡爾曼濾波的不平順識別結果一定會存在漂移成分,這是由車體絕對位移的不可觀測性決定的,本文采用的集合經驗模態(tài)分解方法對漂移成分具有良好的去除效果。
3) 采用3個及以上車輛振動響應觀測量時,即使對車輛各自由度的約束仍然不足,但若僅關注某一輪對的部分波段的動態(tài)不平順識別結果,則仍具有可供工程應用的準確性。
4) 在引入相對位移量作為觀測量時,由于車輛傳遞函數特性與傳感器噪聲的影響,使得不平順的長波部分識別效果有所改善,但短波成分識別效果會變差。
5) 在傳感器布置合理的情況下,車輛參數的小幅度偏移不會對識別效果產生明顯影響;車輛速度的變化會對識別效果產生較大影響,車速較低時,簡支梁跨徑大小的波段內的不平順識別效果不佳;提升信噪比有助于擴展識別結果的有效波長范圍。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-11-30 02:58:01
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年8期)2016-10-09 02:11:50
電源技術(2016年9期)2016-02-27 09:05:39
