基于YOLOv5 的交通燈識別系統建立
2023-09-25 01:31:24姚雨含劉慧舟
中阿科技論壇(中英文) 2023年9期
姚雨含 劉慧舟
(海南大學信息與通信工程學院,海南 海口 570100)
在無人駕駛中,對于交通燈交通標志的識別是智能環境中的重要一環。準確地識別出交通燈的信息,并且對傳輸信號進行及時處理,對于保障自動駕駛的安全性和可靠性具有極其重要的意義。為此,本文基于YOLOv5對交通燈的識別展開研究。通過圖像采集系統收集圖像,構建數據集,對交通燈的顏色進行識別并提高準確度[1]。
目前對于交通燈的識別可以分為傳統的圖像處理和基于視覺的目標檢測方法。圖像處理主要有模糊隸屬度函數、歸一化法、殘差法、k均值聚類法、高斯分布建模方法等,他們檢測圖像顏色的方法多為圖像處理的方法,主要有對圖像進行降噪預處理、顏色空間閾值分割、通過形狀特征過濾等步驟[2]。基于計算機視覺的目標檢測方法可以分為兩類:傳統的目標檢測算法和基于深度學習的目標檢測算法。傳統的目標檢測算法主要是通過逐步滑動窗口對整幅圖像進行遍歷,選取目標框,再利用方向梯度直方圖(Histogram of Oriented Gradient,HOG)、尺度不變特征變換(Scale Invariant Feature Transform,SIFT)等方式對目標框提取特征,最后結合SVM、Adaboost分類器等對目標進行分類。而基于深度學習技術的目標檢測算法,通過將整幅圖像作為神經網絡的輸入,直接在輸出層通過回歸得到目標框的位置和種類等信息,有著更高的檢測速度。與傳統的檢測方法相比,其檢測結果更好,泛化能力更強,更能夠滿足自動駕駛汽車對可靠性和實時性的要求。
基于這些特點,本文采用基于深度學習的方法,對路面交通燈進行檢測和識別,致力于構建一個更加智能化的路面信息系統[3]。
1 識別控制系統
在系統中可采用光學裝置和非接觸的傳感器裝置,通過鏡頭對目標物體的圖像進行采集,然后將采集到的信號傳遞到系統處理器,由此處理器對傳遞過來的圖像進行識別與分類此時的交通燈情況,并針對這些情況發送控制指令至汽車的控制系統。汽車控制系統可以控制汽車啟動發動機運轉、制動等,使汽車根據交通燈情況進行行駛,從而保證無人駕駛的安全性。如圖1所示,根據實際應用設計出應用系統。

圖1 系統結構圖
2 數據集分析
為了準確檢測和識別交通燈,需要使用合適的數據集來進行訓練。常用數據集有Bosch Small Traffic Lights Dataset(BSTLD)和Lara數據集,Bosch數據集圖像采集自德國,是目前國內外公開的最大的有標注的交通燈數據集;而Lara數據集來自巴黎,只含單一的交通燈標簽且交通場景復雜,分辨率較低。本次設計中試驗的數據集也部分來自于自主制作的交通燈圖像數據集。
3 基于YOLOv5的交通燈識別的設計
2020年YOLOv5算法出現,其設計了馬賽克數據增強、Focus結構等,使模型結構變得更加輕量化,對試驗設備的資源要求非常友好,同時進一步平衡了檢測精度和速度。
YOLOv5模型根據其深度、寬度的差異可以分為四個不同規模的模型:YOLOv5nano、YOLOv5samll、YOLOv5middle以及YOLOv5large。本文以YOLOv5s為例進行說明,其他版本模型都是在YOLOv5s的基礎之上對網絡進行加深和擴展,其結構原理都與YOLOv5s類似。
YOLOv5s的網絡結構主要由三部分組成,即Backbone、Neck和Prediction部分。
第一,Backbone(骨干網絡)包含了Focus、CBL、CSP和SPP四種模塊。首先,輸入大小為640×640×3的圖片,通過Focus模塊進行切片處理,輸出大小為320×320×12的特征圖,以此來減少網絡的計算量,提升選擇區域的特征提取速度并通過Concat將切片圖像的高度和寬度整合,增加輸入圖像的通道數。其次,切片后的圖像通過CBL模塊來提取特征,在特征提取的過程中,使用CSP殘差結構來優化網絡中的梯度信息,減少了推理計算量,加快網絡的計算速度。最后,由SPP模塊通過多次池化,完成對高層次語義特征的提取與融合。將不同尺寸的輸入轉變為相同大小的輸出,解決了輸入圖像尺寸不統一的問題,提升模型精度。
第二,Neck(頸部結構)主要是進行特征融合,Neck部分使用了ReLU激活函數,采用路徑聚合網絡(Path Aggrega-tion Network,PANet)結構融合不同尺寸的特征圖。先通過從上到下對圖片進行上采樣,將提取到的特征與主干網絡中提取到的特征進行融合,添加一個自下向上的特征金字塔結構,對圖片進行降采樣,將提取到的所有特征進行融合。通過PANet網絡結構可以彌補并融合強定位信息,最終將輸出用于Head的檢測中。
第三,Prediction(輸出端)使用GIoU作為目框的損失函數,通過非極大值抑制(NMS)來篩選目標框。YOLOv5s結構圖如圖2所示。
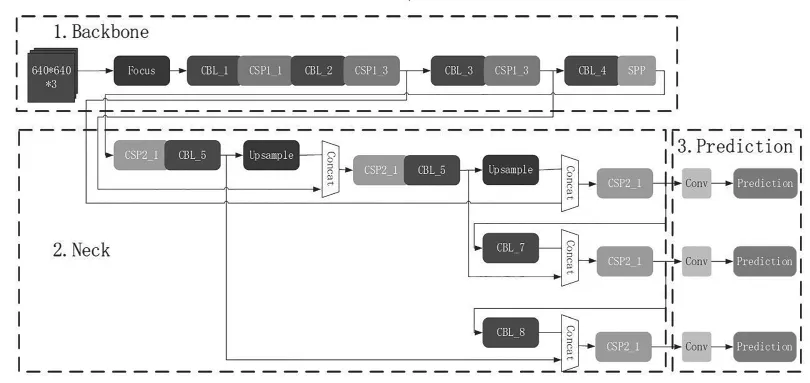
圖2 YOLOv5s結構圖
與YOLOv4系列相同,YOLOv5系列使用了Mosaic數據增強的方式。將1~4 張圖片進行隨機裁剪、縮放后,再隨機排列拼接形成一張圖片,在豐富了檢測數據集的同時,通過隨機縮放增加了很多小目標樣本,使網絡具有更好的魯棒性,增加了網絡訓練的速度,同時降低了GPU的占用。YOLOv5系列新增了自適應錨框,在之前的兩個版本中,訓練不同的數據集初始錨框的值是通過運行單獨的程序得到的;但YOLOv5中將此功能加入到了代碼中,每次訓練自適應地計算得到不同訓練集中的最佳錨框值,從而幫助網絡快速收斂。
與YOLOv3相同,YOLOv5仍然利用 K-means 方法進行預測框的預測,依據預測框中心位置、左上角的相對偏移進行邊界回歸,進行實際框的計算
式中,mx、my、mw、mh為預測框的中心點坐標、寬度、高度;nx、ny為卷積殘差操作所得特征圖單元格左上角坐標;、ty表示預測框中心點相對于網格最左上角坐標的偏移量;tw、th表示預測框的寬高相對于錨框寬高的相對比例;、ph為錨框的寬度和高度。
YOLOv5的損失函數由預測框位置損失函數、目標置信度損失函數和預測框目標分類函數組成
式中,Lbox——預測框位置損失函數;
Lobj——目標置信度損失函數;
Lcls——預測框目標分類函數。
通常情況下用PR曲線和AP值來評價一個該模型的性能。
4 試驗
4.1 參數設置
試驗采集了不同時間、不同天氣情況、不同交通道路的交通燈圖片3 000張,選取其中2 500張進行訓練,剩余的500張作為預測集。使用Python語言進行程序的編寫。主要配置參數:在最優方法中動量因子(momentum)設置為 0.9,學習的效率設置為0.001,更新間隔(batch)為32,訓練樣本數(subdivisions)設置為 16,權重衰減因子(decay)設置為0.000 5。對每次學習后的參數按照比例進行降低,以防止過擬合(該參數越大,對過擬合的抑制作用越強),迭代終止條件(max_batches)設置為20 200。本次試驗采取了兩種學習的方案,分別對比它們的學習效果。
方案一:不使用steps策略,從0~30 000次迭代統一使用0.001的學習率。
方案二:使用steps策略,將整個過程分為三個階段,第一、二、三階段迭代次數分別為16 000次、8 000次和6 000次。在16 000次迭代和24 000次迭代將學習率調整為第一階段的0.5倍和第二階段的0.2倍,即調整為0.000 5和0.000 1。
4.2 訓練結果
經過訓練,比較方案一和方案二在不同迭代次數下的平均損失如表1所示,并繪制平均損耗曲線(Avg Loss Curve)和平均交并比曲線(Avg IOU Curve),同時對比加入目標跟蹤(DeepSort)和不加入的區別。分別如圖3、圖4和圖5所示。
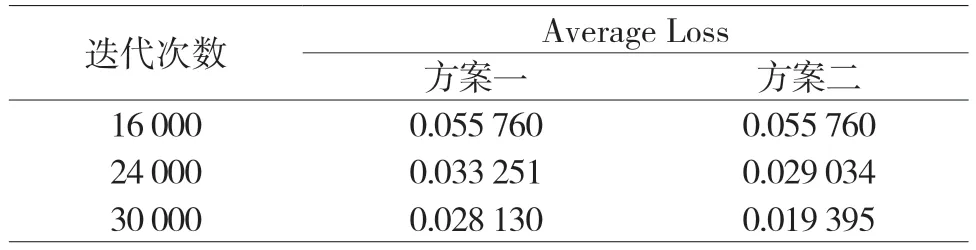
表1 兩種方案迭代次數與平均損失
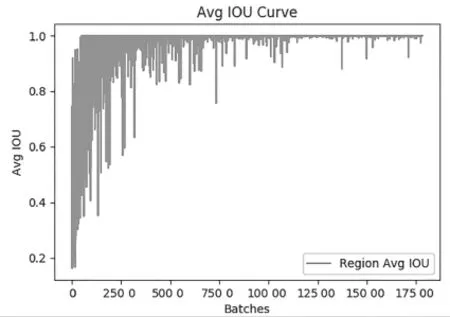
圖3 平均交并比曲線
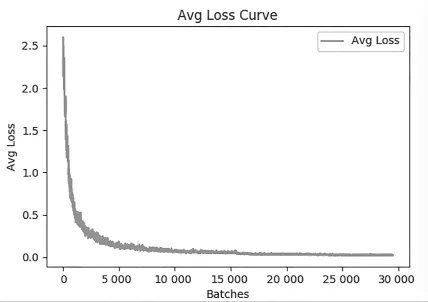
圖4 平均損耗曲線
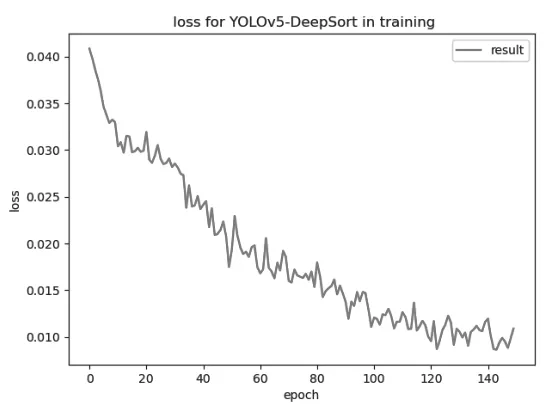
圖5 加入DeepSort后的Loss曲線
對比方案一與方案二訓練結果可知:
方案一的loss值在迭代24 000次以后的變化非常不明顯,24 000次迭代到30 000次迭代的Avg Loss只下降了15.40%,且逐漸趨于一個值不再下降,最后Avg Loss值為0.028也略大。且觀察其Avg Loss曲線發現,在接近30 000次迭代時曲線斜率趨近于0,過于平緩幾乎不再變化。
方案二的loss值在迭代24 000次以后的變化較為明顯,24 000次迭代到30 000次迭代的Avg Loss下降了33.20%。最后Avg Loss值為0.019較方案一也明顯更理想。且觀察其Avg Loss曲線發現,在接近30 000次迭代時曲線并未趨于平緩。
對比兩種方案發現,發現采用steps策略可以更高效地降低Avg Loss值,避免Avg Loss過早地趨于平穩不再下降。
5 結果
將訓練模型得到的模型權重best.pt用來做測試,輸入測試所需的命令行,將待測試的圖片放入文件夾中并輸入在命令中進行測試,改進前和改進后對比結果如圖6、圖7所示。

圖6 改進前的檢測結果

圖7 改進后的檢測結果
由改進前后的檢測結果圖可以看出,采用了step學習的檢測,能夠更準確地區分方向和數字的區別,提高了交通燈識別的準確性。固定交并比(IoU)閾值=0.5,改變置信度閾值,計算得到不同的Precision-Recall點。連接所有的點,得到了PR曲線,求PR曲線下的面積就是該類別的平均精準度(mAP)。識別結果的PR曲線如圖8所示。可以得出該模型的性能良好。

圖8 識別結果的PR曲線
6 結語
為了提高自動駕駛技術的可靠性和準確性,設計了一套基于YOLOv5的交通燈識別系統,該系統通過對數據集進行訓練。調試合適的參數,對比了使用step學習和不使用step學習的兩種方案,得出使用step學習能夠提升識別的準確性。本文使用的YOLOv5算法相較于傳統的識別方法,實時性和準確性都有了很大的提高,有利于汽車無人駕駛技術和無人駕駛的發展。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
