基于IRANSAC-IRLS 直線擬合算法及應(yīng)用
2023-09-25 08:41:00羅金鐄胡小平彭向前黃泓
自動(dòng)化與儀表 2023年9期
關(guān)鍵詞:模型
羅金鐄,胡小平,彭向前,黃泓
(湖南科技大學(xué) 機(jī)電工程學(xué)院,湘潭 411201)
直線邊緣是工業(yè)生產(chǎn)零件中最常見(jiàn)的輪廓特征[1],它包含了最基本的幾何信息和拓?fù)湫畔ⅰT趯?duì)工業(yè)生產(chǎn)的零件圖像進(jìn)行處理的過(guò)程中[2],往往需要對(duì)直線邊緣進(jìn)行擬合或定位,但是由于零件表面存在臟污,或者加工工藝的問(wèn)題,使得直線邊緣存在沾連、毛刺等噪聲,導(dǎo)致直線上的邊緣點(diǎn)會(huì)偏離直線,對(duì)圖像處理的結(jié)果產(chǎn)生較大地影響。因此,研究在噪聲較多的情況下,快速而準(zhǔn)確地?cái)M合出直線邊緣是非常有意義的[3]。
在直線擬合方面的研究中,國(guó)內(nèi)外學(xué)者已經(jīng)取得了不少研究成果。文獻(xiàn)[4]提出將霍夫變換[5]和梯度下降結(jié)合的方法擬合邊緣直線,但是該方法對(duì)線性噪聲敏感,容易出現(xiàn)誤判,而且擬合精度不高;傳統(tǒng)最小二乘法(least-squares line fitting,LS)擬合速度很快,但其容易受到噪聲點(diǎn)的干擾,在噪聲點(diǎn)多于10%的情況下就不能精確的擬合出直線的參數(shù);文獻(xiàn)[6]提出迭代重加權(quán)最小二乘直線擬合算法,該算法在噪聲點(diǎn)少時(shí)能夠得到很高的擬合精度,但是在噪聲點(diǎn)較多,導(dǎo)致初始擬合偏差較大的情況下,不能擬合出高精度的直線邊緣。以上算法在噪聲點(diǎn)多的情況下,都不能擬合出準(zhǔn)確的直線。
為解決噪聲點(diǎn)對(duì)擬合精度的影響,文獻(xiàn)[7]提出隨機(jī)抽樣一致性算法,它具有優(yōu)良的魯棒性,能夠通過(guò)迭代在含有70%噪聲點(diǎn)的點(diǎn)集中尋找出最優(yōu)模型,但其最終的擬合精度依賴于額外的擬合算法,而且算法的耗時(shí)會(huì)隨著噪聲點(diǎn)的增加呈指數(shù)增長(zhǎng)[8];文獻(xiàn)[9]為了提高RANSAC 算法的運(yùn)行速度,提出一種基于預(yù)檢驗(yàn)的抽樣一致性算法,總的來(lái)說(shuō)確實(shí)能提高算法的運(yùn)行速度,但是在其隨機(jī)的子集選取過(guò)程中,可能會(huì)將正確的模型誤判成錯(cuò)誤的模型,在噪聲多時(shí),可能會(huì)陷入無(wú)限次的抽樣與檢驗(yàn)的過(guò)程中。綜上所述,如何在含有大量噪聲點(diǎn)的點(diǎn)集中快速而準(zhǔn)確地?cái)M合出直線的參數(shù)是十分重要的。
針對(duì)直線邊緣存在大量噪聲點(diǎn)的情況下,RANSAC算法效率低、精度不高的問(wèn)題,提出IRANSAC-IRLS算法。首先,通過(guò)Canny 算子提取出直線的邊緣;然后,利用直線上的邊緣點(diǎn)的梯度方向相近,將梯度方向引入邊緣點(diǎn)RANSAC 擬合,降低錯(cuò)誤的隨機(jī)抽取次數(shù),篩選出擬合時(shí)的部分噪聲點(diǎn);最后,對(duì)IRANSAC 提取出來(lái)的局內(nèi)點(diǎn)進(jìn)行迭代加權(quán)最小二乘擬合,降低數(shù)據(jù)本身的誤差對(duì)擬合的影響,提高擬合的精度。仿真實(shí)驗(yàn)和實(shí)際產(chǎn)品實(shí)驗(yàn)證明該算法具有良好的時(shí)效性和魯棒性。
1 直線邊緣提取
在進(jìn)行擬合之前,都需要獲取直線的邊緣點(diǎn)集,微分算子是圖像處理的各種邊緣檢測(cè)方法中最常用的方法,Canny 算子[10]具有良好的邊緣檢測(cè)效果,該方法通過(guò)建立梯度幅值圖,利用高低兩個(gè)閾值來(lái)提取圖像中的邊緣,考慮了梯度幅值與梯度方向之間的關(guān)系,抗干擾能力最強(qiáng),對(duì)于圖像中的弱紋理也具有良好的檢測(cè)效果,本文通過(guò)Canny 算法提取出直線邊緣,其算法步驟如下:
(1)用高斯函數(shù)對(duì)圖像進(jìn)行濾波,作平滑運(yùn)算,然后對(duì)圖像進(jìn)行卷積處理,得到該點(diǎn)x 方向上的梯度值Fx,該點(diǎn)y 方向上的梯度值Fy。
該點(diǎn)的梯度幅值F:
該點(diǎn)梯度方向θ:
(2)通過(guò)高低閾值來(lái)判斷點(diǎn)是否為邊緣,對(duì)圖像中的弱紋理是通過(guò)判斷該點(diǎn)的梯度幅值是不是梯度方向上的局部最大值,保證了該算法良好的弱紋理檢測(cè)效果。
2 RANSAC 算法
2.1 RANSAC 算法基本思想
RANSAC 是一種從模型數(shù)據(jù)中隨機(jī)抽取滿足模型的最小樣本數(shù)來(lái)估計(jì)樣本的數(shù)學(xué)模型的方法,其利用模型的余集對(duì)隨機(jī)抽取的樣本進(jìn)行檢驗(yàn)[11],然后通過(guò)迭代的思想進(jìn)行最優(yōu)模型的尋找,由于算法通過(guò)迭代進(jìn)行尋求最優(yōu),犧牲了算法的時(shí)效性,算法的運(yùn)行時(shí)間隨著噪聲點(diǎn)的增加呈指數(shù)增長(zhǎng),不能滿足工業(yè)實(shí)時(shí)性的要求[12]。
2.2 RANSAC 算法改進(jìn)方向
通過(guò)RANSAC 算法的基本思想,可以分析出RANSAC 算法的基本的優(yōu)化方向,可向著以下兩個(gè)方向進(jìn)行優(yōu)化:
(1)在樣本子集選取的時(shí)候,可以根據(jù)某些約束條件對(duì)隨機(jī)抽樣的樣本子集進(jìn)行約束,來(lái)減少錯(cuò)誤抽取和檢驗(yàn)的次數(shù)。
(2)當(dāng)通過(guò)樣本子集估計(jì)出總體模型后,可以只利用剩余點(diǎn)中的一部分來(lái)對(duì)估計(jì)的總體模型進(jìn)行驗(yàn)證,但該優(yōu)化方向在噪聲點(diǎn)多時(shí)可能會(huì)造成誤檢驗(yàn),從而陷入無(wú)限次的抽取和檢驗(yàn)中。
3 基于IRANSAC-IRLS 的直線擬合算法
經(jīng)Canny 提取的直線邊緣數(shù)據(jù)中包含了大量噪聲點(diǎn),而隨著噪聲點(diǎn)的增加,RANSAC 算法的運(yùn)行時(shí)間呈指數(shù)增長(zhǎng),為解決這一問(wèn)題,利用同一條直線上的點(diǎn)的梯度方向相近,將梯度方向引入RANSAC算法中,提出IRANSAC-IRLS 直線擬合算法,該算法利用梯度方向?qū)ANSAC 算法中隨機(jī)抽取的樣本進(jìn)行約束,減少誤抽取,提高算法的效率,同時(shí)引入梯度方向?qū)?nèi)點(diǎn)的判斷模型進(jìn)行改進(jìn),減少提取出來(lái)的局內(nèi)點(diǎn)點(diǎn)集中的噪聲點(diǎn),然后再結(jié)合迭代加權(quán)最小二乘法對(duì)提取出來(lái)的最優(yōu)局內(nèi)點(diǎn)點(diǎn)集進(jìn)行擬合,提高最終的擬合精度,其算法的流程如圖1所示。

圖1 算法流程Fig.1 Algorithm flow chart
3.1 IRANSAC 算法
(1)在邊緣點(diǎn)集上隨機(jī)抽取確定直線方程的最小點(diǎn)數(shù),即2 個(gè)點(diǎn),設(shè)點(diǎn)1 的梯度方向?yàn)镚1,點(diǎn)2 的梯度方向?yàn)镚2,如果隨機(jī)抽取的2 個(gè)點(diǎn)在同一條直線上,則兩點(diǎn)的梯度方向差的絕對(duì)值應(yīng)在一定范圍內(nèi),自定義2 個(gè)抽樣點(diǎn)梯度方向差的閾值Tg,公式如下:
如抽取的兩點(diǎn)的梯度方向不滿足公式(3),則重新抽取。如滿足,那么使用這兩點(diǎn)計(jì)算直線估計(jì)模型,并以這兩點(diǎn)的梯度方向的平均值作為直線的梯度方向的主方向Mg:
(2)遍歷剩余的點(diǎn),如果點(diǎn)為直線上的點(diǎn),應(yīng)滿足2 個(gè)條件:
①首先,該點(diǎn)的梯度方向應(yīng)和直線的梯度方向主方向差值的絕對(duì)值小于閾值t:
式中:Gi為該點(diǎn)的梯度方向,然后計(jì)算該點(diǎn)到直線的距離di:
②設(shè)定距離閾值D,若di<D,則滿足第2 條件;若同時(shí)滿足上述2 個(gè)條件,則可認(rèn)為該點(diǎn)為局內(nèi)點(diǎn),否則是局外點(diǎn),即噪聲點(diǎn)。遍歷結(jié)束后,計(jì)算出所有局內(nèi)點(diǎn)的數(shù)目,并計(jì)算內(nèi)點(diǎn)的比例ε=局內(nèi)點(diǎn)總數(shù)/數(shù)據(jù)點(diǎn)總數(shù)。
(3)重復(fù)進(jìn)行步驟(1)和步驟(2),進(jìn)行迭代,保存局內(nèi)點(diǎn)最多的最優(yōu)模型,保存當(dāng)前迭代次數(shù)N,直到N 大于終止迭代次數(shù)m。
RANSAC 的迭代終止次數(shù)m 可以根據(jù)理論計(jì)算,計(jì)算公式如下:
由文獻(xiàn)[13]可知,在置信度為η0的條件下,循環(huán)多次后,應(yīng)至少存在一次采樣,使得選擇出來(lái)的b個(gè)抽樣子集均為局內(nèi)點(diǎn),置信度η0為在樣本中抽取一個(gè)好樣本的概率,一般設(shè)置在[0.95,0.99]的范圍內(nèi);b 表示模型估計(jì)所需要的最小點(diǎn)數(shù),本文取2;ε 表示局內(nèi)點(diǎn)在所有樣本點(diǎn)中所占的比例。
對(duì)改進(jìn)算法進(jìn)行分析,首先該方法在樣本點(diǎn)抽取后,利用抽樣點(diǎn)的梯度方向?qū)Τ跏汲闃幽P瓦M(jìn)行預(yù)檢驗(yàn),降低了計(jì)算的時(shí)間;其次,在樣本點(diǎn)檢驗(yàn)時(shí)利用梯度方向條件,進(jìn)一步對(duì)擬合時(shí)的部分噪聲點(diǎn)進(jìn)行二次篩選,降低了局內(nèi)點(diǎn)集合的誤差。
3.2 迭代加權(quán)最小二乘法擬合
經(jīng)IRANSAC 提取出的局內(nèi)點(diǎn)需要進(jìn)行擬合,傳統(tǒng)的擬合常使用標(biāo)準(zhǔn)的最小二乘擬合法,與直線距離較遠(yuǎn)的點(diǎn)和與直線距離相近的點(diǎn)都擁有相同的權(quán)重,得到的直線參數(shù)并不是理想的。因此,引入迭代加權(quán)最小二乘法對(duì)局內(nèi)點(diǎn)進(jìn)行擬合,根據(jù)點(diǎn)到直線的距離對(duì)每個(gè)點(diǎn)進(jìn)行加權(quán),其目標(biāo)損失函數(shù)如下:
式中:Wi為各邊緣點(diǎn)對(duì)應(yīng)權(quán)重,i=1,2,…,num;k 為斜截式直線的斜率;b 為斜截式直線的截距。
將點(diǎn)到直線的距離d 作為權(quán)函數(shù)變量:
權(quán)函數(shù)有Tukey、Geman-MClure、Huber 等類型,本文采用Huber 權(quán)函數(shù),各點(diǎn)對(duì)應(yīng)的權(quán)函數(shù)如下:
式中:u 為設(shè)置距離閾值。
為求解式(8),對(duì)式(8)的k 和b 分別求偏導(dǎo),得到:
采用常規(guī)最小二乘法求解,解得初始k0和b0;代入式(8)~式(12),更新權(quán)重,多次迭代求解斜率k和截距b,然后根據(jù)角度和截距的變化量來(lái)設(shè)置迭代終止條件。
4 實(shí)驗(yàn)與分析
4.1 仿真實(shí)驗(yàn)
為了驗(yàn)證IRANSAC-IRLS 直線擬合算法的有效性,在2.50 GHz 的i7-6500U~CPU 平臺(tái)上進(jìn)行仿真,假設(shè)要擬合的直線為y=0.1x+20,其角度為5.7106°,構(gòu)建噪聲點(diǎn)比例分別為20%、40%、60%、80%的300數(shù)據(jù)點(diǎn),直線上的點(diǎn)的梯度方向設(shè)置在直線主方向角的[-10,+10]之間隨機(jī)分布,噪聲點(diǎn)的梯度方向在直線主方向角的[-90,+90]之間隨機(jī)分布。
設(shè)置IRANSAC-IRLS 算法中的計(jì)算模型參數(shù)需要的最小數(shù)據(jù)點(diǎn)b=2,置信概率η=0.98,抽樣點(diǎn)梯度方向差的閾值Tg=2°,點(diǎn)與直線的梯度主方向差的閾值t=30°,點(diǎn)到直線的距離閾值D=1。設(shè)置迭代最小二乘法距離閾值u=0.8,終止迭代條件為直線的角度變化量小于0.008°。對(duì)不同噪聲點(diǎn)比例下RANSAC-LS 與IRANSAC-IRLS 算法的直線擬合精度和效率進(jìn)行仿真分析,100 次數(shù)據(jù)的平均值如表1 所示。
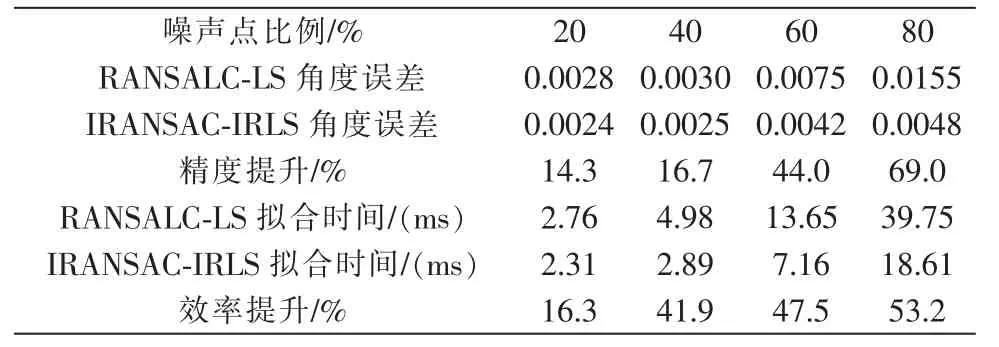
表1 300 數(shù)據(jù)點(diǎn)時(shí)RANSALC-LS 和IRANSAC-IRLS 的數(shù)據(jù)分析Tab.1 Data analysis of RANSALC-LS and IRANSAC-IRLS at 300 data points
4.2 實(shí)際產(chǎn)品實(shí)驗(yàn)
為驗(yàn)證IRANSAC-IRLS 算法在工業(yè)實(shí)際數(shù)據(jù)中是否有實(shí)際的應(yīng)用價(jià)值和應(yīng)用效果,對(duì)比分析不同的直線擬合算法在實(shí)際應(yīng)用的使用效果。將本文算法在兩種產(chǎn)品中進(jìn)行測(cè)試,并與霍夫擬合、IRLS和RANSAC-LS 直線擬合算法進(jìn)行對(duì)比,其中產(chǎn)品1為某含噪試管直線邊緣,具有440 個(gè)數(shù)據(jù)點(diǎn);產(chǎn)品2為某液晶屏幕直線邊緣,具有2700 個(gè)邊緣數(shù)據(jù)點(diǎn)。通過(guò)實(shí)驗(yàn)可得,對(duì)于兩種實(shí)際工業(yè)圖像數(shù)據(jù),本文提出的IRANSAC-IRLS 擬合精度相較于霍夫直線擬合和IRLS 的擬合精度有較大地提高。霍夫直線擬合容易受噪聲點(diǎn)的干擾擬合出多條直線,而工業(yè)環(huán)境下往往是需要擬合出最優(yōu)直線,IRLS 受噪聲點(diǎn)的影響導(dǎo)致初始偏差大的情況下,也無(wú)法擬合出精準(zhǔn)的直線參數(shù)。RANSAC-LS 在產(chǎn)品1 和產(chǎn)品2 中的擬合時(shí)間分別為22 ms 和788 ms;IRANSAC-IRLS在產(chǎn)品1 和產(chǎn)品2 中的擬合時(shí)間分別為11 ms 和144 ms;IRANSAC-IRLS 算法在產(chǎn)品1 和產(chǎn)品2 中的擬合效率相較于RANSAC-LS 分別提高50.0%和81.7%,擬合精度也有所提高。
5 結(jié)語(yǔ)
本文提出的IRANSAC-IRLS 直線擬合算法,在RANSAC-LS 的基礎(chǔ)上通過(guò)引入梯度方向?qū)﹄S機(jī)抽取的樣本進(jìn)行約束,減少了錯(cuò)誤抽取的次數(shù),提高了算法的時(shí)效性;對(duì)提取出來(lái)的局內(nèi)點(diǎn)進(jìn)行迭代加權(quán)最小二乘直線擬合,降低數(shù)據(jù)本身的誤差對(duì)擬合的影響,提高了最終的擬合精度。仿真實(shí)驗(yàn)結(jié)果表明,在噪聲點(diǎn)比例20%、40%、60%、80%的條件下,IRANSAC-IRLS 擬合效率比RANSAC-LS 分別提高16.3%、41.9%、47.5%、53.2%,擬合精度分別提升14.3%、16.7%、44.0%、69.0%,能有效地提高含有大量噪聲點(diǎn)的直線邊緣的擬合效率和精度。將本文算法應(yīng)用于不同的工業(yè)產(chǎn)品圖像的直線擬合中,驗(yàn)證了本文的算法具有良好的時(shí)效性和魯棒性,能廣泛地應(yīng)用于自動(dòng)化行業(yè),但是該算法只適用于直線擬合,未來(lái)如何讓其適用與多種形狀的擬合,是后續(xù)要研究的方向。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
