傾轉(zhuǎn)旋翼機(jī)舵面故障后動態(tài)傾轉(zhuǎn)過渡優(yōu)化
2023-09-27 09:28:04陳金鶴陳立霞黃水林
航空科學(xué)技術(shù) 2023年9期
陳金鶴,陳立霞,黃水林
中國直升機(jī)設(shè)計研究所 直升機(jī)動力學(xué)全國重點實驗室,天津 300300
傾轉(zhuǎn)旋翼機(jī)具有三種飛行模式:直升機(jī)模式下低速性能良好,固定翼模式下飛行速度可超過550km/h,過渡模式可實現(xiàn)平滑地在直升機(jī)模式和飛機(jī)模式間的轉(zhuǎn)換;且其具有飛行噪聲低、飛行包線寬的優(yōu)勢。但傾轉(zhuǎn)旋翼機(jī)由于構(gòu)造復(fù)雜,也存在一定的技術(shù)問題,尤其是在傾轉(zhuǎn)過渡變體、變速過程中的穩(wěn)定性和操縱性變化顯著,同時在飛行過程中可能遇到各種可預(yù)見與不可預(yù)見故障,則會導(dǎo)致飛行員應(yīng)急操縱不當(dāng),很可能造成飛行事故,因此研究傾轉(zhuǎn)旋翼機(jī)舵面故障后的應(yīng)急操縱和飛行軌跡,對制定應(yīng)急操縱程序和提升飛行安全具有重要意義。
操縱面故障(失效、卡滯、松浮)是引起飛行事故的主要原因之一。故障的出現(xiàn)將改變傾轉(zhuǎn)旋翼機(jī)的飛行動力學(xué)特性,縮小飛行包線。針對傾轉(zhuǎn)旋翼機(jī)舵面失效后的飛行軌跡和操縱,國內(nèi)外集中于容錯控制的理論研究[1-5],當(dāng)飛行器在飛行過程中發(fā)生故障或者意外損傷時,重構(gòu)飛行控制,通過實時調(diào)整控制器參數(shù)或改變控制器結(jié)構(gòu),維持正常的飛行。傾轉(zhuǎn)旋翼機(jī)的操縱冗余是其可重構(gòu)的基礎(chǔ),故障的多樣性[6-7]導(dǎo)致容錯控制存在局限性,且飛行控制律的重構(gòu)同樣面臨最終的飛行軌跡和操縱受指令的影響,難以兼容飛機(jī)狀態(tài)、飛行環(huán)境等一系列限制條件下的擇優(yōu)性。
為確保故障后的飛行安全,重新規(guī)劃安全飛行軌跡和提供相應(yīng)的操縱參考,采用數(shù)值優(yōu)化方式則是一種降低飛行試驗成本和風(fēng)險的重要手段。基于數(shù)值優(yōu)化方法的常規(guī)直升機(jī)故障研究[8-9],將發(fā)動機(jī)失效和尾槳卡滯/失效后的安全著陸問題轉(zhuǎn)換為軌跡優(yōu)化問題,采用數(shù)值優(yōu)化算法進(jìn)行求解。傾轉(zhuǎn)旋翼機(jī)故障后的研究同樣集中于發(fā)動機(jī)失效后的低速回避區(qū)、最優(yōu)化軌跡和操縱[10-14],其中Carlson[10-12]面向傾轉(zhuǎn)旋翼機(jī)發(fā)動機(jī)失效后的飛行軌跡和操縱優(yōu)化問題進(jìn)行了研究,主要采用縱向操縱、旋翼拉力、短艙傾角等變量,建立縱向二維剛體動力學(xué)模型,并結(jié)合安全著陸適航要求,對傾轉(zhuǎn)旋翼機(jī)低速回避區(qū)進(jìn)行了研究。嚴(yán)旭飛[13]引入XV-15混合操縱模型,建立傾轉(zhuǎn)旋翼機(jī)增廣縱向二維飛行動力學(xué)模型,著重研究了短距起飛單發(fā)失效著陸的最優(yōu)化軌跡。
面向傾轉(zhuǎn)旋翼機(jī)舵面失效、卡滯、松浮等故障狀態(tài)后的飛行軌跡和操縱優(yōu)化的研究相對較少。本文考慮傾轉(zhuǎn)過渡過程中的重心、慣量變化,以傾轉(zhuǎn)旋翼機(jī)縱向飛行動力學(xué)模型為基礎(chǔ),通過對傾轉(zhuǎn)過渡過程進(jìn)行解析,構(gòu)建傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡和故障狀態(tài)的最優(yōu)控制模型;采用混合多重打靶法進(jìn)行離散化處理形成非線性規(guī)劃問題,并基于序列二次規(guī)劃算法進(jìn)行求解。最后,以XV-15傾轉(zhuǎn)旋翼機(jī)為研究對象,開展傾轉(zhuǎn)過渡過程的仿真驗證,并進(jìn)行故障注入后的飛行軌跡和操縱優(yōu)化研究。
1 傾轉(zhuǎn)旋翼機(jī)基礎(chǔ)模型
針對XV-15傾轉(zhuǎn)旋翼機(jī)的正向傾轉(zhuǎn)過渡過程中,出現(xiàn)執(zhí)行機(jī)構(gòu)的松浮和卡滯等故障狀態(tài)后的最優(yōu)安全飛行策略進(jìn)行研究。根據(jù)傾轉(zhuǎn)旋翼機(jī)的縱向?qū)ΨQ特性,以及不考慮橫向運動,可認(rèn)為傾轉(zhuǎn)過渡過程中傾轉(zhuǎn)旋翼機(jī)的飛行及操縱都應(yīng)當(dāng)在縱向平面內(nèi)[14]。傾轉(zhuǎn)旋翼機(jī)飛行動力學(xué)模型中旋翼氣動力的計算采用葉素理論、均勻入流模型、準(zhǔn)定常一階揮舞運動;考慮旋翼尾跡對機(jī)翼的干擾,將機(jī)翼劃分為滑流區(qū)和自由流區(qū),自由流區(qū)的機(jī)翼氣動模型和常規(guī)飛機(jī)機(jī)翼類似,滑流區(qū)的機(jī)翼氣動力模型需要考慮旋翼尾流在機(jī)翼處的干擾速度和滑流區(qū)的面積;不考慮旋翼尾跡、機(jī)體對尾翼的氣動干擾。各部件的氣動力和力矩系數(shù)均來自XV-15的吹風(fēng)數(shù)據(jù)[15,16]。
式中,θ0為左、右旋翼槳根總距,θs為縱向周期變距,θe為升降舵偏轉(zhuǎn)角,δcol為總距桿量,δlon為縱向桿,δIN為短艙傾轉(zhuǎn)角,?θ0/?δcol為總距系數(shù),θ0G為總距管理器補(bǔ)償量,旋翼總距補(bǔ)償角θ0L與δN相關(guān),θsmax為最大縱向周期變距,δB1為補(bǔ)償量,θemax為升降舵最大偏轉(zhuǎn)量[14]。
采用操縱量的一階導(dǎo)數(shù)作為控制變量,避免數(shù)值優(yōu)化計算過程中出現(xiàn)“bang-bang”現(xiàn)象。傾轉(zhuǎn)旋翼機(jī)飛行動力學(xué)方程如下
式中,y=[u,w,q,θ,x,h,δcol,δlon,δIN]為狀態(tài)變量,其中,u為縱向速度,w為垂向速度,q為機(jī)體俯仰角速率,θ為機(jī)體俯仰角,x為縱向位移,h為飛行高度,為總距桿操縱速率,lon為 縱 向 桿 操 縱 速 率,?N為 短 艙 傾 轉(zhuǎn) 角 速 率。u=[δ?col,?lon,?IN]為控制變量;t為時間;傾轉(zhuǎn)旋翼機(jī)的重心隨著發(fā)動機(jī)短艙的傾轉(zhuǎn)在飛行器縱向平面內(nèi)移動,發(fā)動機(jī)短艙的重心位置不在旋翼軸上,采用以下方程進(jìn)行計算
式中,βM=π/2-iN,iN為短艙傾角;SLCG|iN=90,WLCG|iN=90為傾轉(zhuǎn)旋翼機(jī)直升機(jī)模式的重心縱向、垂向位置;WP和GW分別為兩個發(fā)動機(jī)短艙的總質(zhì)量和飛行器總質(zhì)量;SLsp,WLsp,SLp,WLp分別為發(fā)動機(jī)短艙中心和短艙支點的縱向、垂向位置。
傾轉(zhuǎn)飛行過程中,傾轉(zhuǎn)旋翼飛行器的縱向轉(zhuǎn)動慣量同樣會隨著發(fā)動機(jī)短艙的傾轉(zhuǎn)而變化,可用式(4)進(jìn)行計算
式中,IYY|iN=90為直升機(jī)模式下傾轉(zhuǎn)旋翼飛行器的慣性矩;KI2為常系數(shù)[16]。
2 動態(tài)傾轉(zhuǎn)過渡及故障模型
傾轉(zhuǎn)旋翼機(jī)在升降舵、旋翼執(zhí)行機(jī)構(gòu)出現(xiàn)故障后,仍然存在一定的可操縱性,如傾轉(zhuǎn)旋翼縱向平面內(nèi)的操縱存在冗余,即升降舵和縱向周期變距間存在一定的替代性,這類操縱冗余是傾轉(zhuǎn)旋翼機(jī)在發(fā)生執(zhí)行機(jī)構(gòu)故障后,可以安全飛行的基礎(chǔ)。
傾轉(zhuǎn)旋翼機(jī)的最優(yōu)動態(tài)傾轉(zhuǎn)過渡問題可轉(zhuǎn)化為一種時間連續(xù)的非線性動態(tài)最優(yōu)控制問題。在遭遇升降舵、旋翼執(zhí)行機(jī)構(gòu)等故障后,從一類滿足可操縱性和安全性的操縱策略中找到一種可以使直升機(jī)由初始狀態(tài)傾轉(zhuǎn)過渡到指定目標(biāo)狀態(tài)的操縱策略,并使性能指標(biāo)達(dá)到最優(yōu)。最優(yōu)控制問題一般由性能指標(biāo)、動態(tài)方程、邊界條件和路徑約束組成。
(1) 性能指標(biāo)
傾轉(zhuǎn)旋翼機(jī)在動態(tài)傾轉(zhuǎn)過渡過程中,由于短艙傾轉(zhuǎn),旋翼垂向力和機(jī)翼升力變化,導(dǎo)致俯仰姿態(tài)有較大變化,則需要飛行員采用適當(dāng)?shù)牟倏v來穩(wěn)定姿態(tài)控制,還需考慮整個動態(tài)傾轉(zhuǎn)過渡的時間,故性能指標(biāo)如下
式中,J為目標(biāo)變量;t0為初始時刻;tf為末端優(yōu)化時刻;wt為末端時間加權(quán)系數(shù);wc為操縱量加權(quán)系數(shù)矩陣;wq為俯仰角速率加權(quán)系數(shù);wθ為俯仰角加權(quán)系數(shù)。
(2) 狀態(tài)方程
采用上述傾轉(zhuǎn)旋翼機(jī)飛行動力學(xué)方程(2)。
(3) 邊界條件
傾轉(zhuǎn)旋翼機(jī)直升機(jī)模式穩(wěn)定飛行狀態(tài)為初始邊界條件;飛行末端邊界條件設(shè)定為傾轉(zhuǎn)角度以及前飛速度,即
式中,int為目標(biāo)短艙傾轉(zhuǎn)角度;x?t為目標(biāo)前飛速度。
(4) 路徑約束
由于傾轉(zhuǎn)旋翼機(jī)受操縱系統(tǒng)限制,需要對操縱速率、操縱桿量等進(jìn)行限制;操縱桿量的范圍不變。
傾轉(zhuǎn)過渡過程中機(jī)體姿態(tài)不宜過大,對機(jī)體俯仰姿態(tài)角θ和角速率q進(jìn)行限制。
式中,hmin,hmax為飛行高度的上下限。
旋翼可用功率的限制是最基本和最重要的限制要素,則過渡過程中的功率約束為
式中,Pmax為傾轉(zhuǎn)旋翼發(fā)動機(jī)輸出的額定功率。
2.1 故障模型
飛行器控制系統(tǒng)的故障可分為傳感器故障、作動器故障、系統(tǒng)狀態(tài)故障和模型偏差故障,這里主要討論作動器常見故障,包括操縱面卡死和操縱面損傷。
(1) 操縱面卡死故障
此故障可描述為
式中,a為常數(shù),且umin≤a≤umax,uout為故障操縱面;umin和umax為操縱面的限制范圍,操縱面卡死故障表現(xiàn)為操縱面位置始終固定于操縱面輸出限制范圍內(nèi)的某一固定位置。
(2) 操縱面損傷故障
此故障可描述為
式中,β為操縱面損傷系數(shù),且0 ≤β≤1,操縱面損傷故障表現(xiàn)為故障操縱面的操縱效率下降為原來的β倍。
2.2 數(shù)值解法
進(jìn)行數(shù)值優(yōu)化計算過程中,由于狀態(tài)變量和控制變量的量綱、數(shù)值之間差別較大,會導(dǎo)致數(shù)值求解困難。因此對最優(yōu)控制模型進(jìn)行量綱一縮放化處理,其中狀態(tài)方程(2)可寫成如下形式
其中
混合單一多重打靶法是一種聯(lián)合直接多重打靶和單一打靶法用于處理高階非線動力學(xué)模型的較為實用的方法,如圖1 所示。復(fù)雜度較高的直升機(jī)飛行動力學(xué)模型是較難用于非線性軌跡優(yōu)化研究的,這是由于難以做到兼顧計算效率和計算精度兩個方面,尤其是需要處理復(fù)雜的非線性非定常的旋翼模型。在最優(yōu)化離散過程中,需要劃分極小的積分步長用于處理高頻變化的狀態(tài)量以滿足計算精度要求。旋翼狀態(tài)量xR的變化相對機(jī)體狀態(tài)量變化要迅速得多;且在狀態(tài)量發(fā)生細(xì)小的改變時,旋翼上的力和力矩的劇烈變化,針對旋翼狀態(tài)量,難以給出較為合理精細(xì)的限制約束。
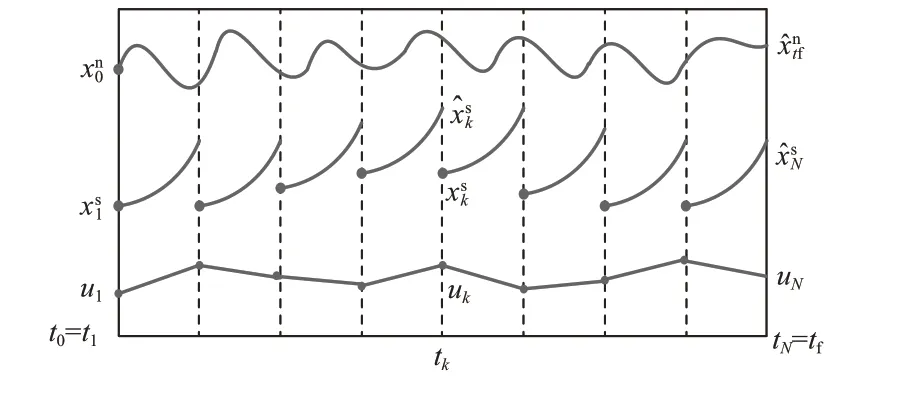
圖1 混合打靶法Fig.1 Hybrid shooting method
應(yīng)用單一打靶法來處理槳葉揮舞運動和旋翼入流狀態(tài)量,關(guān)注旋翼初始狀態(tài)和末端的狀態(tài)量,用于限制旋翼的運動,在飛行過程中的變化過程不參與優(yōu)化計算;應(yīng)用多重打靶法處理旋翼狀態(tài)量的難點在于計算量過大且較難匹配約束條件,但可用于處理機(jī)體狀態(tài)量xF和飛行員操縱桿量xu。可將上述主控方程的狀態(tài)量重新分塊表示為
式中,xs為低頻變化量;xn高頻變化量。
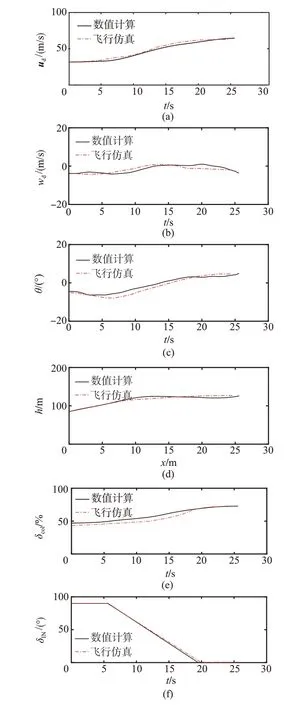
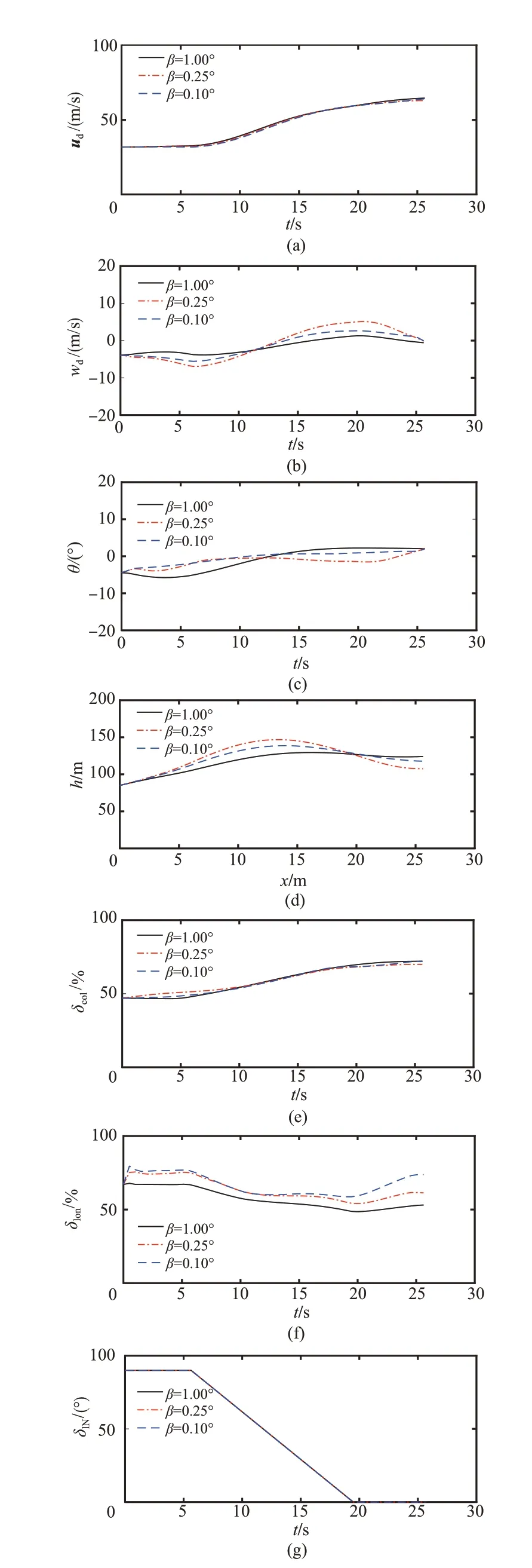
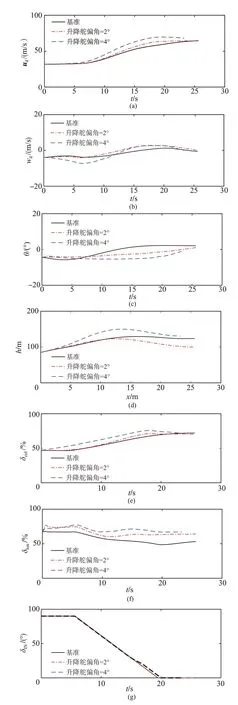
將最優(yōu)控制模型中的時間t平均分成N-1段,形成N個離散時間節(jié)點t0=t1 因此在任一打靶區(qū)間Ωk的殘差方程為 采用同樣的方式計算性能指標(biāo)函數(shù)(5)、邊界約束和路徑約束等,即可構(gòu)建非線性規(guī)劃模型 將非線性最控制問題轉(zhuǎn)化為非線性規(guī)劃模型后,應(yīng)用稀疏系列二次規(guī)劃算法求解即可得到最優(yōu)解X?,序列二次規(guī)劃算法計算效率高、收斂快,適用于計算大規(guī)模非線性最優(yōu)化問題。 利用本文建立的傾轉(zhuǎn)過渡最優(yōu)控制模型計算正向動態(tài)傾轉(zhuǎn)過渡過程,并與參考文獻(xiàn)[16]中的人在回路的仿真數(shù)據(jù)進(jìn)行對比,以驗證本文建立的傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡過程最優(yōu)控制模型的可靠性。參考文獻(xiàn)[17]中人在回路的傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡過程,飛行員采用爬升過程中進(jìn)行短艙傾轉(zhuǎn),以確保飛行安全性,其傾轉(zhuǎn)過渡的初始條件為:速度為32m/s,高度為88m,航跡角為7°。此時為直升機(jī)模式穩(wěn)定飛行狀態(tài)。飛行員自行決策傾轉(zhuǎn)過渡的初始條件和時間,動態(tài)傾轉(zhuǎn)過渡過程完全由飛行員進(jìn)行決策調(diào)整。完成正向傾轉(zhuǎn)后的速度保持在65m/s。進(jìn)行最優(yōu)化計算時采用與人在回路仿真的一致條件。另外,仿真試驗中的短艙傾角由飛行員根據(jù)當(dāng)前飛行狀態(tài)進(jìn)行觸發(fā),存在隨機(jī)性,上述基本約束條件難以準(zhǔn)確描述短艙傾轉(zhuǎn)時間點,因此添加以下約束條件 式中,t1,t2為分段優(yōu)化時間節(jié)點。 圖2給出了本文建立的傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡最優(yōu)軌跡與參考文獻(xiàn)中的傾轉(zhuǎn)動態(tài)過程的對比,其中飛行狀態(tài)基本一致,由于仿真模型存在一定差異,縱向桿量匹配性相對較差,這是由于本文動力學(xué)模型與參考文獻(xiàn)[17]中的人在回路仿真的模型存在差異,主要在于本文旋翼對機(jī)翼干擾模型相對簡單,無法精細(xì)化反映出旋翼尾跡在機(jī)翼上的偏移影響,并未考慮不同旋翼傾角和前飛行速度下對旋翼/機(jī)身/機(jī)翼/平尾的上洗和下洗的影響,同時本文并未將控制增穩(wěn)系統(tǒng)(SCAS)納入模型,以上導(dǎo)致了縱向桿量有一定差異。但本文的桿量基本反映出了傾轉(zhuǎn)過渡過程中縱向操縱規(guī)律。本文基于最優(yōu)控制理論建立的傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡基本能夠滿足動態(tài)傾轉(zhuǎn)過渡研究與分析。 圖2 傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡對比驗證Fig.2 Dynamic transition verification of tilt-rotor aircraft 傾轉(zhuǎn)旋翼機(jī)在故障發(fā)生后具備可操縱性是飛行軌跡優(yōu)化的基礎(chǔ)。在上述前向動態(tài)傾轉(zhuǎn)過程中注入升降舵損傷、卡滯故障,進(jìn)行傾轉(zhuǎn)動態(tài)傾轉(zhuǎn)過渡可行性分析,圖3給出了升降舵損傷結(jié)果。 圖3 升降舵損傷故障后的傾轉(zhuǎn)過渡過程Fig.3 History of transition after elevator damage fault 圖3 中,針對傾轉(zhuǎn)旋翼機(jī)升降舵注入舵面損傷故障,在注入升降舵損傷故障后,傾轉(zhuǎn)旋翼機(jī)基本能夠完成相應(yīng)的傾轉(zhuǎn)過渡過程,傾轉(zhuǎn)過渡過程基本無較大影響。其中建立的動態(tài)傾轉(zhuǎn)過渡最優(yōu)模型,其目標(biāo)函數(shù)中包含最少完成時間,以及方程(18)中限制了傾轉(zhuǎn)過渡觸發(fā)最小時刻,因此傾轉(zhuǎn)角度變化過程基本無變化;升降舵的舵效損失會影響升降舵的實際偏轉(zhuǎn)量,傾轉(zhuǎn)旋翼機(jī)縱向通道的總操縱功效為 式中,ΔMδlon為縱向通道總操縱功效;ΔMθs為旋翼縱向周期變距形成的操縱功效;ΔMθele為升降舵形成的操縱功效。 其中直升機(jī)模式階段(短艙傾角為90°),以旋翼的縱向周期變距和升降舵共同操縱,因此在該階段升降舵舵效出現(xiàn)損失時,則飛行員采取增加桿量以應(yīng)對該升降舵操縱的損失的飛行策略;直升機(jī)模式拉升總距桿量和增加縱向桿量輸出,以使傾轉(zhuǎn)旋翼機(jī)在直升機(jī)模式下獲取更大的爬升率,并保持傾轉(zhuǎn)旋翼機(jī)在傾轉(zhuǎn)過渡末端的飛行高度。 隨著短艙傾轉(zhuǎn),按照上述混合操縱模型,旋翼縱向周期變距的操縱功效逐漸減小,縱向操縱逐漸過渡至升降舵,因此縱向桿量的需求在傾轉(zhuǎn)初始階段基本一致,隨著短艙傾角接近0°,升降舵為唯一操縱面,但同時面臨升降舵舵效不同損失程度,導(dǎo)致飛行員采取增加縱向桿量的策略,其中損失系數(shù)越小,則需要的縱向桿量越多,這是由于傾轉(zhuǎn)旋翼機(jī)達(dá)到65m/s穩(wěn)定前飛速度所需升降舵的實際舵偏總是一致的。 圖4給出了升降舵卡滯后的傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡過程,在注入升降舵卡滯故障后,基本采用更大的推桿操縱,以旋翼縱向周期變距操縱為主,當(dāng)旋翼傾轉(zhuǎn)至固定翼模式后,旋翼縱向周期變距失效,同時隨著升降舵卡滯角度逐漸增加,平尾形成的低頭力矩逐漸增加,此時飛行員通過提升總矩油門桿量,提高前飛速度,抑制傾轉(zhuǎn)旋翼機(jī)的低頭過程。隨著升降舵偏角卡滯量的增大,總距油門量增加,導(dǎo)致前飛速度迅速增加,加速了傾轉(zhuǎn)過渡過程。 本文針對傾轉(zhuǎn)旋翼機(jī)動態(tài)傾轉(zhuǎn)過渡過程中的舵面故障問題,基于最優(yōu)控制理論建立分析模型,并進(jìn)行數(shù)值仿真,得出舵面故障后的最優(yōu)飛行軌跡和操縱,結(jié)論如下: (1) 建立的舵面故障分析模型,可快速分析計算傾轉(zhuǎn)旋翼機(jī)舵面故障后的最優(yōu)化飛行軌跡和操縱,可用于飛行員應(yīng)急操縱參考。 圖4 升降舵卡滯后的傾轉(zhuǎn)過渡Fig.4 History of transition with elevator getting stuck (2) 升降舵出現(xiàn)舵效損失時,固定翼模式低速模式下存在可操縱能力,此時飛行員需要增大縱向桿量輸出;升降舵出現(xiàn)卡滯后,此時傾轉(zhuǎn)旋翼機(jī)雖然存在一定的動態(tài)傾轉(zhuǎn)過渡能力,但由于固定模式下,傾轉(zhuǎn)旋翼機(jī)的縱向操縱能力喪失,無法實現(xiàn)固定翼模式下的較大速度飛行。 (3) 升降舵出現(xiàn)舵效損失或卡滯時,傾轉(zhuǎn)旋翼機(jī)雖然存在一定的操縱空間,當(dāng)采取直升機(jī)模式飛行,以旋翼縱向周期變距操縱為主。3 動態(tài)傾轉(zhuǎn)舵面故障數(shù)值仿真
3.1 動態(tài)傾轉(zhuǎn)過渡驗證
3.2 升降舵損傷故障狀態(tài)分析
3.3 升降舵卡滯故障狀態(tài)分析
4 結(jié)論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34