高速直升機艙內噪聲主動控制技術研究
2023-09-27 09:28:04梁寧遠陳寶韓松辰陳佳偉王玉琢王普緣
航空科學技術 2023年9期
關鍵詞:信號
梁寧遠,陳寶,韓松辰,陳佳偉,王玉琢,王普緣
1.中國航空工業空氣動力研究院 黑龍江省空氣動力噪聲及其控制重點實驗室,黑龍江 哈爾濱 150001
2.低速高雷諾數航空科技重點實驗室,黑龍江 哈爾濱 150001
直升機旋翼流場及噪聲特性復雜,按噪聲產生機理,旋翼氣動噪聲分為寬帶噪聲、厚度噪聲、載荷噪聲、高速脈沖噪聲和槳—渦干擾噪聲。旋翼產生的各類氣動噪聲發聲原理不同,傳播指向性也存在區別,使得直升機噪聲問題突出且降噪難度大。噪聲過大是長期以來影響直升機競爭力的重要因素,過高的直升機艙內噪聲極大降低了乘坐舒適性。尤其是高速直升機,前飛速度高,流動更加復雜,噪聲更強烈,引起的艙內噪聲問題尤為突出,因此進行高速直升機艙內降噪設計研究十分必要[1-2]。
目前,對高速直升機艙內噪聲控制的研究主要集中在旋翼翼型設計、智能旋翼和振動控制等聲源方面[3-6],對從艙內噪聲聲場角度出發開展主動噪聲控制仍少有研究。在航空領域,主動噪聲控制技術首次被嘗試應用于解決螺旋槳飛機艙內噪聲控制問題,相關研究以歐盟框架計劃中的飛機主動噪聲控制預先研究(Advance Study of Active Noise Control for Aircraft,ASANCA)項目為代表,該項目涉及11 個歐盟國家的22 個飛機制造商、大學和研究機構,由英國南安普頓大學利用BAe748 型號螺旋槳飛機完成首次艙內噪聲主動噪聲控制飛行試驗[7];項目組各單位后續又分別對包括SAAB340、SAAB2000、Dornier228、ATR42等螺旋槳飛機在內的多種機型進行了主動噪聲控制的地面測試和飛行試驗。試驗結果表明,對于螺旋槳基頻噪聲,平均降噪量為15~20dB,局部區域的降噪量高達27dB。英國超級電子公司與瑞典薩伯公司合作,在SAAB340飛機上首次將主動噪聲控制技術商業化,隨后A400M、龐巴迪沖8Q400、美國空軍C-130-H3 等機型上均裝配了主動噪聲控制系統[8]。
由于直升機與螺旋槳飛機艙內噪聲特性相近,學者開始嘗試通過主動噪聲控制技術進行直升機艙內噪聲控制。美國Lord 公司在Bell 206L 直升機艙內進行了主動噪聲控制試驗。C.C.Boucher 等[9]對EH101 直升機進行主動噪聲控制研究,使用32 路傳感器和16 路揚聲器對處在17.5Hz的旋翼槳葉通過二、三階諧波頻率和處在63.38Hz 的尾槳槳葉通過頻率進行有效控制,降噪量達到12dB。
國內部分高校與科研院所對飛機艙內噪聲主動控制技術也開展了研究,如西北工業大學、南京大學和中科院聲學所等。胡涵等[10]使用自主研制的主動噪聲控制系統對國產某型直升機機艙開展降噪試驗,在噪聲突出的兩處頻率處取得了約6dB降噪量。目前我國還沒有實裝于國產直升機內的成熟主動噪聲控制系統。
目前,大部分針對直升機機艙的主動噪聲控制研究均是通過仿真分析或真實環境下的反復試驗進行,綜合考慮模型真實性、場景還原性和方法高效性的高速直升機艙內噪聲主動控制研究基本處于空白[11-12]。
本文在實驗室中還原高速直升機真實飛行聲場,在直升機地面模擬艙內開展以揚聲器為作動器的主動噪聲控制相關研究。首先根據數值模擬計算獲取的飛行狀態機身表面測點時域脈動壓力值,通過聲壓匹配法由聲源模擬系統實現旋翼聲場地面模擬再現;繼而對噪聲主動控制算法進行分析,研究算法對低頻線譜噪聲的降噪性能以及算法關鍵參數對性能的影響;然后對主動噪聲控制系統揚聲器與傳聲器的布置方法進行研究,提出一種以總聲壓級降噪量為評判依據的試驗與仿真結合的優化方法;最終開展高速直升機駕駛艙內噪聲主動控制試驗,綜合驗證噪聲主動控制算法的適用性和揚聲器、傳聲器布置方案的有效性。
1 艙內噪聲地面模擬方法
為實現高速直升機旋翼噪聲的地面復現,并為主動噪聲控制技術研究提供測試環境,本文設計了由旋翼噪聲地面模擬系統、地面模擬艙和主動噪聲控制驗證系統組成的高速直升機艙內噪聲主動控制地面模擬與測試平臺(簡稱模擬平臺),如圖1所示。模擬平臺布置在半消聲室中開展艙內噪聲主動控制技術研究。

圖1 旋翼噪聲地面模擬系統Fig.1 Rotor noise ground simulation system
1.1 基于聲壓匹配法的旋翼噪聲地面模擬
對于直升機艙內噪聲主動控制,構建精準的初級聲場是一項十分關鍵的工作,可為控制算法性能驗證、主動噪聲控制系統的揚聲器和傳聲器布置優化、系統調試和驗證測試等工作提供支撐,因此需要地面模擬的初級聲場與目標真實初級聲場有較高的相似度[13-15]。
本文采用數值模擬方法得到共軸旋翼氣動噪聲傳播到駕駛艙外表面的脈動壓力分布,作為目標真實初級聲場。數值模擬中采用基于非結構網格的有限體積法離散三維可壓縮Navier-Stokes 方程進行共軸旋翼流場求解,對流通量采用二階Roe格式,無黏通量采用中心差分格式,時間離散采用隱式二階Euler 向后差分格式,湍流模型為k-ωSST二方程模型;以非定常動量源方法模擬高速直升機共軸旋翼尾跡的作用;得到前進比為0.2、旋翼前傾角為0°、上下旋翼總拉力系數為0.013時駕駛艙前風擋、頂部等強聲載荷區域6個剖面的脈動壓力動態載荷。
本文采用聲壓匹配法[16]對高速直升機旋翼噪聲聲場進行地面模擬,設計了由左側5 個揚聲器、右側5 個揚聲器和頂部6 個揚聲器組成的空間揚聲器陣列,并配備響應控制采集設備建立旋翼噪聲地面模擬系統。空間揚聲器陣列對稱布置在地面模擬艙周圍,頂部揚聲器與旋翼系統等高位置均勻布置,再現旋翼噪聲傳播到模擬艙外表面的初級噪聲。
時域聲場模擬的步驟如下:首先經過數值模擬計算獲得目標聲場時域脈動壓力值,再對該信號進行時域去卷積網絡處理,得到控制揚聲器發聲的時域序列形式驅動信號,然后將該信號輸出到布置好的揚聲器陣列,即可在特定的空間區域再現出目標聲場。圖2為時域聲場模擬示意圖。

圖2 時域聲場模擬示意圖Fig.2 Schematic diagram of the time-domain acoustic field simulation
時域去卷積網絡H(t)的設計是聲場模擬時域模型中非常重要的一個環節,求解流程為:首先采用附加隨機噪聲法求解出聲源模擬系統各揚聲器至直升機地面模擬艙外各表面傳聲器的脈沖響應G(t)。圖3為附加隨機噪聲法實現通路自適應建模示意圖。
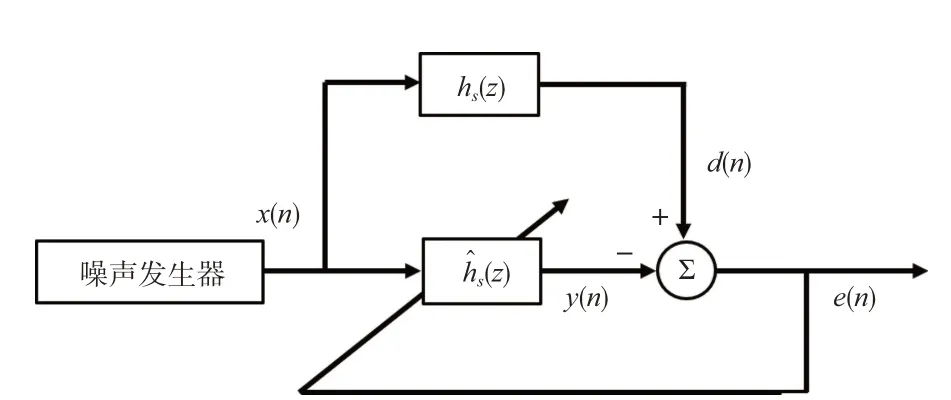
圖3 附加隨機噪聲法實現通路自適應建模示意圖Fig.3 Additional random noise method for path adaptive modeling
然后經傅里葉變換得到傳遞函數G(k),采用奇異值分解法求解頻域形式的去卷積網絡H(k)
式中,ui與vi是傳遞函數G進行奇異值分解后的酉矩陣列矢量;而σi是傳遞函數G進行奇異值分解后的對角矩陣的奇異值元素,濾波矩陣系數fi由式(2)得到
最后,對濾波矩陣里的頻域濾波器逐個進行傅里葉逆變換,得到對應時域上的去卷積濾波器,構成時域去卷積網絡H(t)。其流程如圖4所示。

圖4 時域去卷積網絡求解流程Fig.4 Time-domain deconvolutional network solution flowchart
圖5給出了地面模擬艙表面某監測點處再現聲壓與目標聲壓的頻譜對比,可以看出絕大部分線譜的頻率和聲壓級均實現較好模擬和再現。圖6給出了模擬艙表面各測點再現聲壓級與目標聲壓級對比,計算目標聲壓級與再現聲壓級之差絕對值的測點均值約為2.5dB,旋翼噪聲地面模擬系統較為準確地模擬了高速直升機飛行狀態下的聲場。

圖5 地面模擬艙表面某監測點的聲壓頻譜Fig.5 The sound pressure spectrum of a monitoring point on the surface of the simulation cabin

圖6 地面模擬艙表面9個測點的聲壓級比較Fig.6 Comparison between sound pressure levels at 9 measurement points on the surface of the simulated cabin
1.2 地面模擬艙
直升機地面模擬艙是進行聲學降噪試驗的重要實物,為了使試驗降噪效果接近裝機后的真實效果,本文設計了具有高速直升機特征的全尺寸地面模擬艙。地面模擬艙的長×寬×高為3m×2m×2m,風擋玻璃和艙門玻璃使用亞克力板,整體由傳力骨架加艙體蒙皮組成。艙體采用骨架加蒙皮鉚接的結構形式,骨架為方鋼管,蒙皮為厚鋁板;艙體兩側布置艙門,艙門可開閉,艙體下平面布置地板用于承載,艙體最下方使用萬向輪支撐和行走。
1.3 主動噪聲控制驗證系統
主動噪聲控制驗證系統包含1個通道參考傳感器、5個通道誤差傳感器和5 個通道次級聲源,采用前饋式濾波-x最小均方算法(FxLMS)和陷波濾波算法。系統由控制器(主要包含電源模塊、輸入/輸出信號調理模塊、數模轉換/模數轉換模塊和實時處理模塊)、兩通道功率放大和前置放大一體機、次級聲源及支架、0.5in(12.7mm)傳聲器、聲級校準器等組成。次級聲源采用HiVi S5N 型號低中音揚聲器。本文設計的直升機艙內噪聲主動控制系統實物如圖7所示。

圖7 直升機艙內噪聲主動控制系統實物圖Fig.7 Actual diagram of the active noise control system in the helicopter cabin
2 次級聲源布置優化
2.1 降噪量計算方法
主動噪聲控制系統中控制器根據算法實時修正濾波器參數,調整次級聲源輸出信號以應對時變的初級聲場,達到降噪的目的。系統原理如圖8 所示,參考信號傳遞函數為Hr,初級通道傳遞函數為Hp,次級通道傳遞函數為Hs,H′s為預估得到的次級通道傳遞函數。W為控制器濾波器,p(n)、d(n)和x(n)分別為噪聲源發出的噪聲信號、期望信號和參考信號,Me為誤差傳感器靈敏度。
在主動噪聲控制系統中,誤差傳聲器位置的期望信號與抵消信號為
式中,s(n)是濾波器輸出信號y(n)經過次級通路傳到誤差傳感器處的響應,稱為抵消信號。
設濾波器階數為L,第n時刻ANC 系統控制器濾波器權矢量和參考信號可以表示為

圖8 主動噪聲控制系統結構圖Fig.8 Block diagram of active noise control system
由參考信號和濾波器權系數計算可獲得濾波器輸出的次級信號為
式中,r(n)為濾波參考信號,它由參考信號矢量與預估次級通路傳遞函數計算得來。
于是,誤差信號為期望信號與抵消信號的疊加形式
針對本文使用的單參考傳聲器、5 個次級聲源、5 個誤差傳聲器的多通道主動噪聲控制系統,首先從次級聲源發聲的錄音信號中求出第m個揚聲器到第n個誤差傳聲器之間的次級路徑Secm,n,使用各次級路徑對參考信號濾波得到濾波參考信號xm,n。Rm,q,n為xm,n與xq,n的自相關矩陣,dn為初級噪聲發聲時各誤差傳感器處的期望信號,pm,n為濾波參考信號xm,n與期望信號dn之間的互相關矢量。代價函數為N個誤差傳聲器處殘差信號的聲壓平方和的期望,解得維納濾波器組共有5個濾波器w1,w2,w3,w4,w5
則可以由式(11)計算出維納濾波器組
初級噪聲為旋翼噪聲地面模擬系統聲環境下的實錄噪聲,同時對不同布放位置的5 個誤差傳聲器進行錄音,錄音時長為30s;5個次級聲源依次發聲,測量次級路徑脈沖響應。分別計算濾波參考信號的自相關矩陣和濾波參考信號與期望信號的互相關矩陣,由式(11)計算得到使誤差信號最小的濾波器組,由式(10)計算得到誤差信號,誤差傳聲器處的期望信號與誤差信號聲壓級差值即為降噪量。
2.2 次級聲源布置方案
在半消聲室中,由模擬平臺的聲源模擬系統揚聲器陣列共同發聲重構直升機運轉時實際聲場環境,將誤差傳聲器布置在直升機地面模擬艙內前后排乘員頭部位置處,并將次級聲源一一對應布置在誤差傳感器附近,通過改變誤差傳感器與次級聲源的間距,實測6 組布放方案的初級通路與次級通路傳遞函數,計算并對比各組布放方案的理論最大降噪量,以便分析次級聲源布置對降噪量的影響規律。試驗模型與半消聲室如圖9所示。

圖9 試驗模型與半消聲室Fig.9 Test model and semi-anechoic chamber
考慮實際直升機艙內安裝環境,次級源和誤差點初始布放位置如圖10所示,其中①~⑤為誤差傳聲器。誤差傳感器布置在艙內乘員坐姿時人耳位置,距駕駛艙地板高度均為0.95m,誤差傳聲器①和②距前艙壁1.85m,誤差傳聲器③和⑤距后艙壁0.42m。誤差傳聲器④在駕駛艙左右艙壁中心線上,誤差傳聲器③和⑤關于誤差傳聲器④對稱布置,誤差傳聲器①和②關于駕駛艙左右艙壁中心線對稱布置,通過調整次級聲源與誤差傳聲器的距離設置對照試驗。其他5組布置方案相對初始布放位置,誤差傳感器位置固定不變,調節次級聲源位置,方案的描述見表1。
通過對比不同布置方案各誤差點的降噪效果,考慮目標噪聲控制頻率上限為1000Hz,下述試驗均使用4kHz采樣率。
2.3 布置方案降噪效果分析
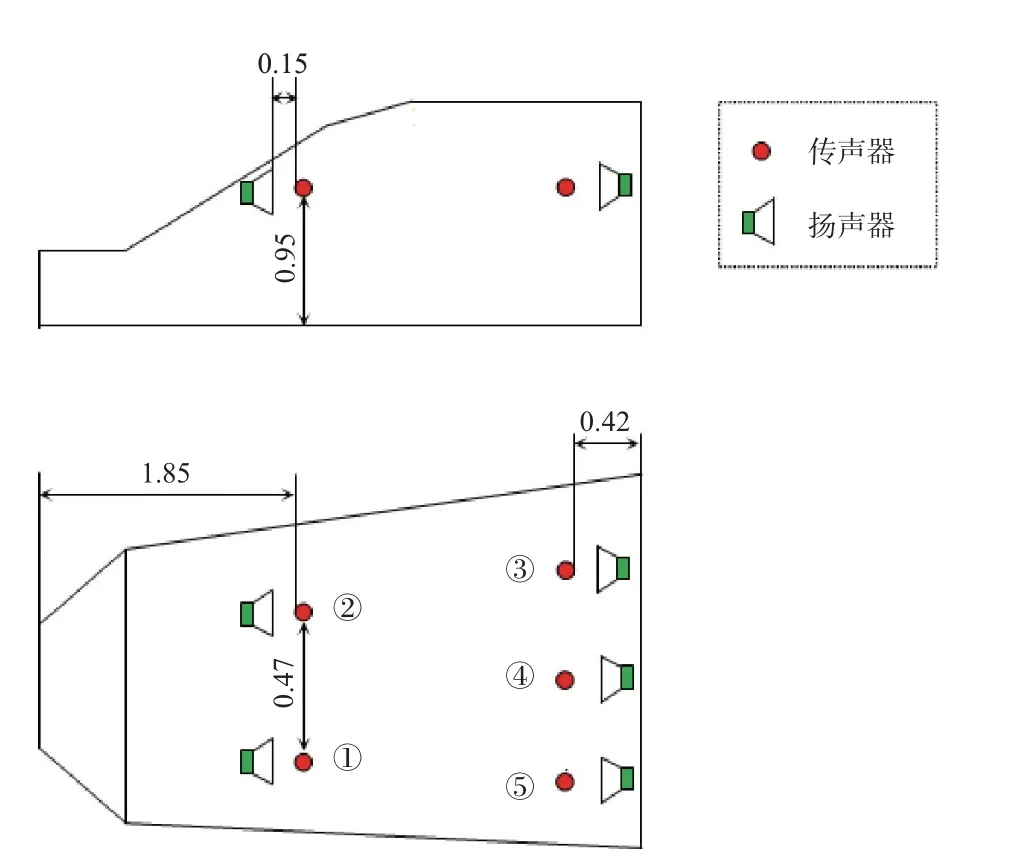
圖10 次級聲源和誤差傳聲器初始布放示意圖(單位:m)Fig.10 Schematic diagram of the initial deployment of secondary sound sources and error microphones(Unit:m)
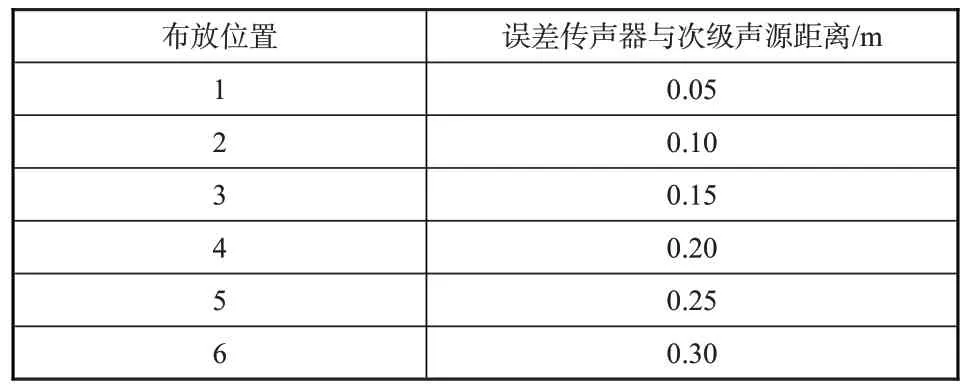
表1 主動控制系統不同布放位置描述Table 1 Description of different deployment positions of the active control system
開啟直升機地面模擬艙外的聲源模擬系統,產生艙內初級噪聲,參考傳聲器放置在聲源模擬系統左側最后靠近模擬艙尾部的音箱前0.10m處。在20~1000Hz范圍內不同誤差傳聲器和次級聲源揚聲器布放位置對應的測點處降噪量見表2。
分析結果顯示,在不同的誤差點和次級源布放位置下,測點1~5處獲得的降噪量不同,在20~1000Hz范圍內,取得的最低降噪量為8.2dB,最大降噪量為27.8dB。通過6組數據對比可知:除測點1 和測點3,其他測點處在主動噪聲控制試驗中調整次級聲源位置使其逐漸靠近對應通道誤差傳感器時,所能取得的降噪效果整體呈下降趨勢;而測點1處隨著距離減小,降噪效果先減小后增大;測點3處降噪效果隨距離減小而呈增大趨勢。

表2 不同布放位置對應的誤差點處降噪量Table 2 The amount of noise reduction at the error points of different placement positions
處于對稱位置的測點1和測點2、測點3和測點5,降噪情況在定性規律上存在差異,而位于前部的測點1和測點2的規律一致性較后部測點3 和測點5 稍好。出現上述現象是因為聲源模擬系統左右兩側音箱聲信號激勵并非完全對稱,并因改變次級聲源位置導致模擬艙聲模態分布改變,且各次級聲源發聲強度不同,導致艙內聲模態不呈現對稱特性,而機艙前部的聲模態對稱性更好。
次級聲源與對應通道誤差傳感器距離過近或過遠時,都會導致艙內設置的目標靜音區域取得的降噪量不均衡,這是由于當各自通道的次級聲源與誤差傳感器過近時,則本通道的次級聲源對本通道誤差傳感器的貢獻量明顯增大,相應地對其他通道的誤差傳感器的作用相對減弱,這會放大各誤差點處聲場環境差異、次級聲源性能穩定性等因素對系統降噪性能分配的影響。次級聲源與對應通道誤差傳感器距離過遠時,次級聲源發聲強度提高,則次級聲源發聲穩定性會對系統降噪量產生影響,且不利于算法收斂。而模擬試驗中間距為0.20m 時,各目標靜音區域能取得降噪明顯且均衡的靜音效果,各誤差傳聲器處均能取得15dB以上的聲壓級降噪量。
圖11 給出了布置方案4 時,測點3 主動噪聲控制前后的噪聲頻譜曲線。
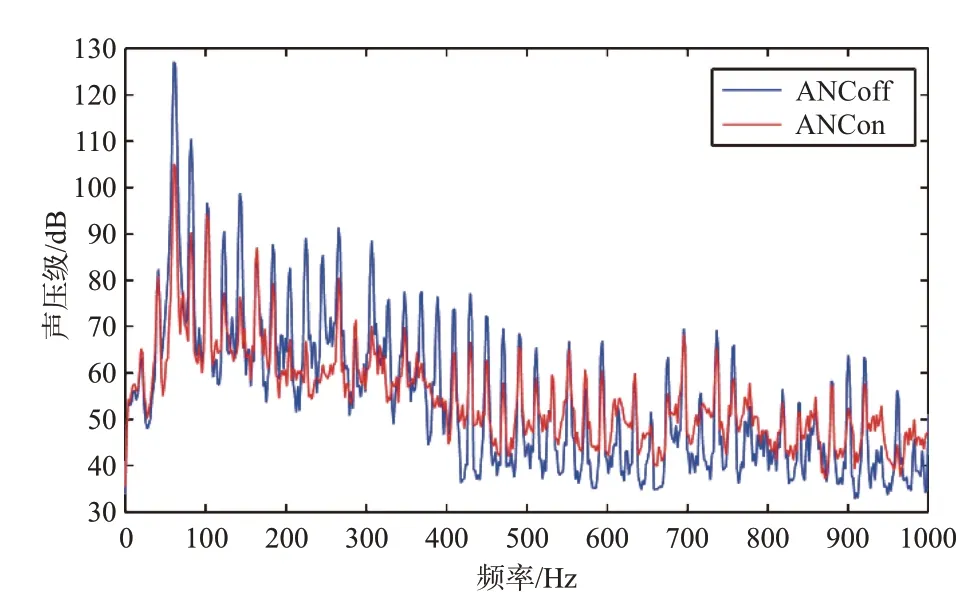
圖11 方案4中測點3主動控制前后噪聲頻譜曲線Fig.11 In scheme 4, the noise spectrum curve before and after active controlling at measurement point 3
由主動控制前后各誤差傳聲器處的噪聲頻譜曲線可知,能量突出的低頻噪聲譜線均得到了有效控制,在絕大多數頻率處取得了10dB及以上的控制效果,此布放方案可對直升機地面模擬艙內的初級噪聲取得較好的控制效果。
3 主動噪聲控制算法對比
3.1 FxLMS算法
自適應主動噪聲控制系統的核心是自適應控制器和自適應控制算法,FxLMS算法是最常用的基于自適應濾波原理的控制算法,FxLMS算法濾波器權系數矢量迭代公式為
對FxLMS算法進行分析,設置初級通道和次級通道傳遞函數,采樣頻率為4kHz,控制濾波器階數為128。分別設置窄帶白噪聲和多線譜合成噪聲兩種初級噪聲環境,其中窄帶初級噪聲源為幅值為2、頻率為100~500Hz的窄帶白噪聲,數據長度為20000,步長設置為0.01;線譜噪聲源為幅值為2,頻率為200Hz、300Hz、400Hz 的三個線譜噪聲的合成噪聲,數據長度為20000,算法步長設置為0.00005。
結果如圖12和圖13所示,由此可知,FxLMS算法對窄帶白噪聲和線譜噪聲均有很好的控制效果。不同步長和不同控制濾波器階數時的收斂曲線如圖14和圖15所示,隨著濾波器階數增加,算法的收斂速度增加;隨著步長增大,算法的收斂速度也增加。
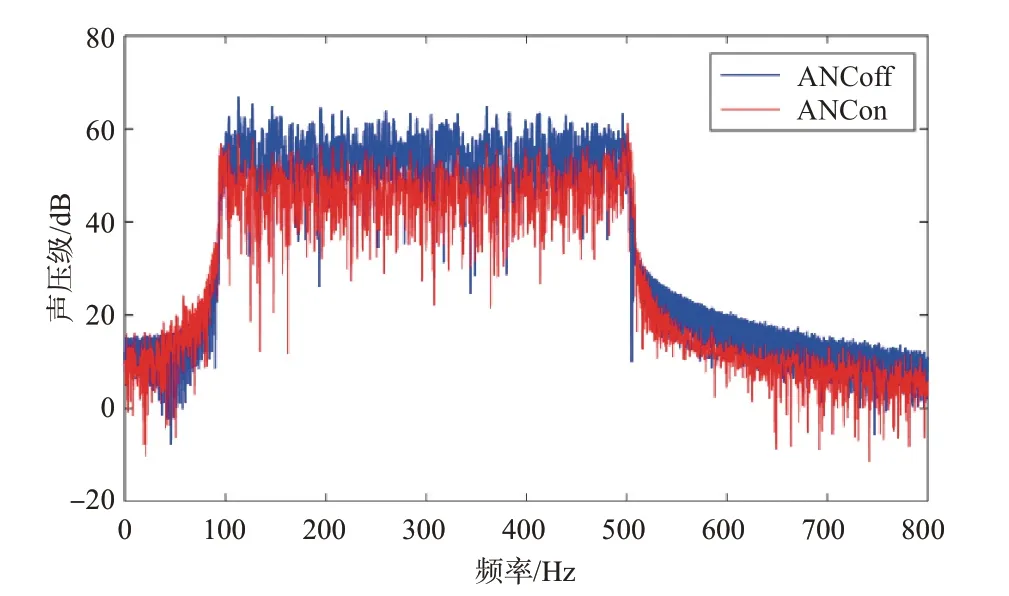
圖12 FxLMS算法窄帶噪聲降噪效果Fig.12 Narrowband noise reduction effect of FxLMS algorithm
3.2 陷波濾波算法
陷波濾波算法是在FxLMS 算法基礎上對控制器中自適應濾波器結構進行一定簡化得來的,系統無須采集參考傳感器信號,而是根據已知待控制的噪聲頻率,直接在控制器的存儲模塊中構造并存儲目標頻率的參考信號,從而減少了算法的計算量。陷波濾波算法在控制頻率處衰減迅速、凹口帶寬可調、可根據目標頻率自由調整凹口位置等特點,使其對有明顯線譜特征的聲場有較好的控制作用[17],單通道單頻自適應陷波濾波算法框圖如圖16所示。
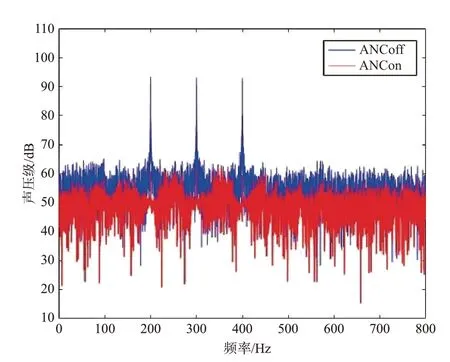
圖13 FxLMS算法線譜噪聲降噪效果Fig.13 Line spectrum noise reduction effect of FxLMS algorithm
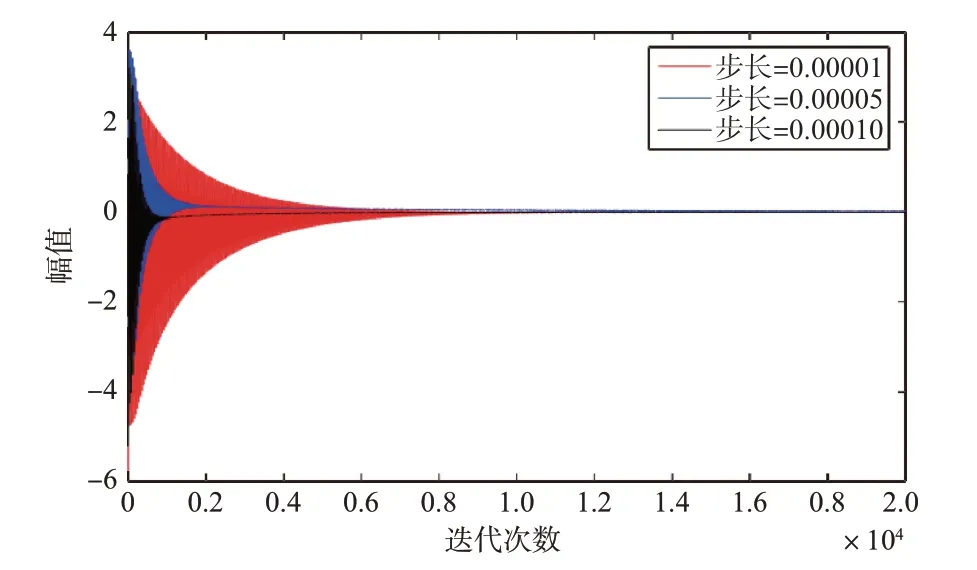
圖14 不同步長線譜噪聲誤差收斂曲線Fig.14 Error convergence curves for line spectrum noise of different convergence steps

圖15 不同濾波器階數線譜噪聲誤差收斂曲線Fig.15 Error convergence curves for line spectrum noise of different filter orders
陷波濾波算法控制器濾波器的迭代公式為

圖16 單通道陷波濾波算法框圖Fig.16 Block diagram of single-channel notch filtering algorithm
構建幅值為5Hz、100Hz 的單頻噪聲進行分析,步長為0.5,算法收斂曲線如圖17 所示。設置算法步數為224000,前2400步進行次級通道辨識。從圖17中可以看出,初級噪聲受到初級通道影響后幅值降低;誤差信號可以很快收斂。
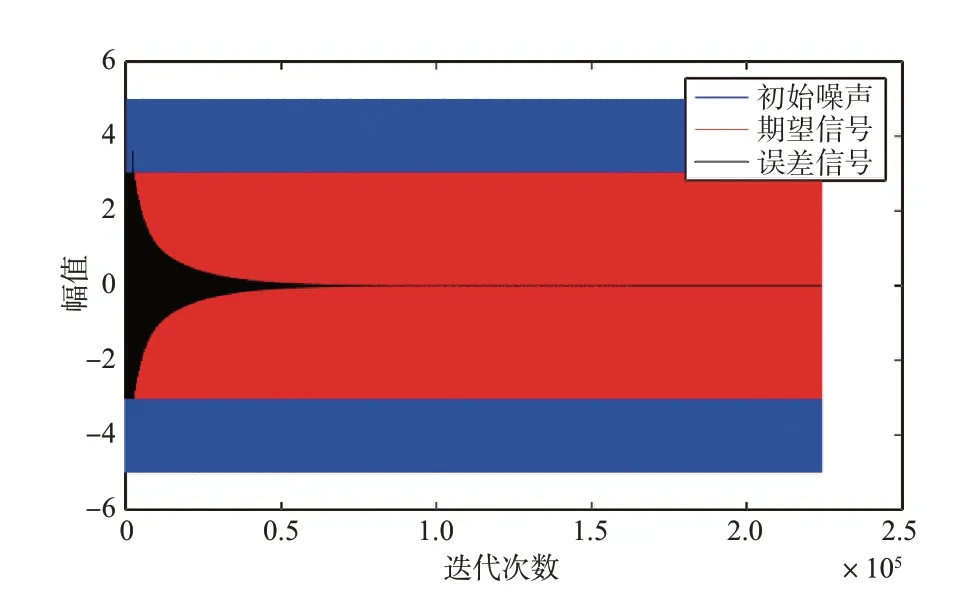
圖17 陷波濾波算法收斂曲線Fig.17 The convergence curve of the notch filtering algorithm
對噪聲頻率為200Hz、250Hz、350Hz 和400Hz 的多頻混疊噪聲進行主動噪聲控制仿真試驗,結果如圖18和圖19所示,能量最突出的4處離散頻率均得到有效控制,且非目標頻率的幅值也未產生明顯升高。
在主動噪聲控制中,初級噪聲實時變化,目標噪聲特征參數的緩慢變化是易于控制的,而當特征參數發生跳變時,就需要算法有更強的自適應調節追蹤能力。因此,在第20000~24000 步處提高初級噪聲幅值,仿真結果如圖20 所示,算法在經過短暫迭代后逐步收斂,誤差信號重新降至極低水平,本次仿真表明,陷波濾波算法魯棒性很好,對初級噪聲信號的突變能較快適應并收斂。
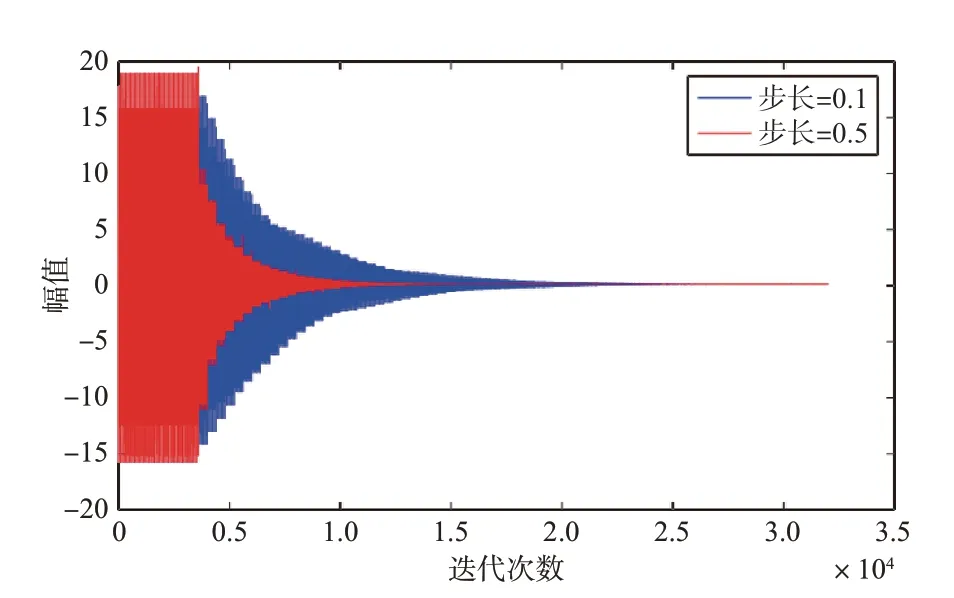
圖18 不同步長多頻混疊噪聲誤差收斂曲線Fig.18 Error convergence curves for multi-frequency aliasing noise of different convergence steps

圖19 多頻混疊噪聲降噪頻譜圖Fig.19 Noise reduction spectrogram for multi-frequency aliasing noise

圖20 誤差信號收斂時域圖Fig.20 Convergence time domain plot of the error signal
3.3 主動噪聲控制算法驗證
利用模擬平臺,采用2.2節中次級聲源和誤差傳聲器布置方案4所述布置,進行三組對比試驗,試驗狀態見表3。

表3 試驗狀態Table 3 Experiment status
3.3.1 總體降噪效果
圖21給出了三組試驗中主動噪聲控制前后誤差點1處的噪聲頻譜。表4給出了第三組試驗各誤差傳感器位置降噪量,可以看出,降噪量均達到10dB以上,平均降噪量為12.7dB。
3.3.2 濾波器階數對比
第一組試驗采用256階濾波器,第二組試驗采用512階濾波器,其他試驗條件如參考傳聲器位置、采樣率和控制算法等均相同。兩組試驗中誤差傳感器1位置各頻率的降噪量對比如圖22所示。
由圖21 可知,直升機艙內噪聲主要能量集中在0~300Hz,對比圖22中300Hz范圍內降噪量,大多數線譜的降噪量達到10dB及以上,濾波器為256階時的降噪量略大于濾波器為512 階時的降噪量。而在300~1000Hz 范圍內,512 階濾波器的降噪量遠大于256 階濾波器。由這組對比試驗可知:濾波器階數增大時,能增加ANC 系統在中高頻段范圍內的降噪量,而在關注低頻段時,降噪量會比濾波器階數低時略有下降。
3.3.3 控制算法對比
第一組試驗采用FxLMS算法,第三組試驗采用陷波濾波算法,針對的目標線譜為圖23 中所示的15 處離散頻率。這兩組試驗的其他試驗條件(如濾波器階數、采樣率等)均相同。兩組試驗中誤差傳感器1位置各頻率的降噪量對比如圖23所示。
對比圖23 中各誤差傳感器位置目標控制頻率的降噪量,可知陷波濾波算法能夠取得比FxLMS算法更高的降噪量。在考慮寬頻帶整體降噪情況時,陷波濾波算法不能對非目標控制頻率收到降噪效果,而FxLMS算法對整個頻帶各頻率都能取得一定降噪效果。由這組對比試驗可知:當初級噪聲聲場呈現明顯的線譜特征時,優先選用陷波濾波算法,可以對各離散頻率收到較好的控制效果;而當初級聲場頻率分布較廣且各頻率能量相近時,選用FxLMS算法可以在寬頻范圍內取得較好的降噪效果。
4 結論
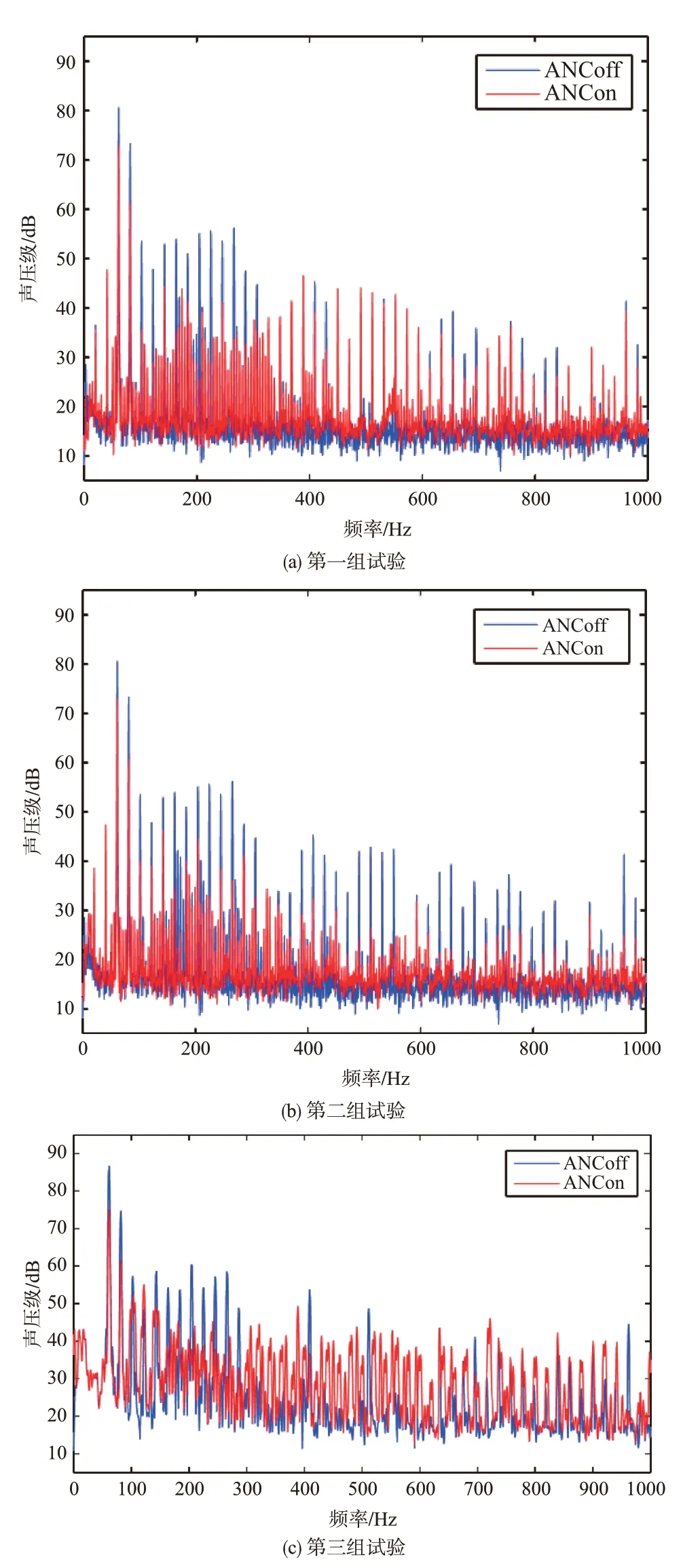
圖21 主動控制前后誤差點1處的噪聲頻譜Fig.21 Noise spectrum at error point 1 before and after active controlling
本文針對高速直升機艙內噪聲主動控制問題開展了次級聲源布置、控制算法等研究。通過旋翼噪聲數值計算和地面模擬,為主動噪聲控制試驗提供了技術支撐,并對噪聲主動控制算法進行分析和對主動噪聲控制系統揚聲器布置進行優化設計。最后,基于上述研究內容實現了直升機地面模擬艙內主動噪聲控制試驗驗證。

表4 降噪量匯總表(總聲壓級,0~1kHz)Table 4 Summary table of noise reduction (total sound pressure level, 0~1kHz)
通過對本文試驗數據的分析可知,按照揚聲器布置優化方案進行試驗時,在各誤差點處多數能量突出的線譜頻率均得到有效控制,取得平均12.7dB 的總聲壓級降噪量;使用大濾波器階數的控制器和陷波濾波算法時,能對中高頻段內具有明顯線譜特征的初級噪聲產生更佳的降噪效果。
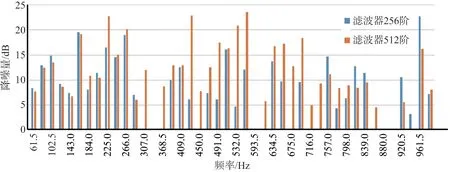
圖22 不同濾波器階數的降噪量對比Fig.22 Comparison between noise reduction amounts of different filter orders

圖23 不同控制算法的降噪量對比Fig.23 Comparison between noise reduction of different control algorithms
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06