基于遺傳算法的常規復合式高速直升機飛行性能參數優化
2023-09-27 09:28:06曾怡蘭韓東劉壯壯
航空科學技術 2023年9期
關鍵詞:優化
曾怡蘭,韓東,劉壯壯
1.南京航空航天大學 直升機動力學全國重點實驗室,江蘇 南京 210016
2.中國航天空氣動力技術研究院,北京 100074
進入21世紀以來,追求高速成為國內外直升機技術領域的重要發展方向。高速直升機能夠快速高效地完成作戰任務,拓寬直升機應用領域,目前在國外直升機行業內研制較為成功的高速直升機構型主要是傾轉旋翼機、共軸剛性旋翼直升機和復合式直升機[1-3]。
常規旋翼構型復合式直升機在傳統直升機基礎上去掉尾槳部件,增加機翼、螺旋槳等升推力裝置,可改善旋翼前行槳葉的槳尖激波和后行槳葉的氣流分離導致的不利影響,提高直升機的最大飛行速度。由于采用了多升力面、多推進面、多操縱面技術,常規旋翼構型復合式直升機的總體布局、總體參數選擇、質量重心設計、氣動布局、氣動效率對全機的飛行性能、飛行特性、飛行品質都具有決定性的影響[3]。為進一步提升其飛行性能,國內外圍繞總體布局和性能優化等方面開展深入研究。H.Yeo[4]分析了高前進比下H-34、UH-1D 和UH-60A 的旋翼性能和AH-56A 復合式直升機的全機性能,研究表明,升力復合布局增大了全機升阻比的最大值,推力復合布局改善高速時的升阻比,完整的復合布局結合了升力和推力復合的特性,全機升阻比最大值和高速時飛行性能均有改善。K.Ferguson 等[5]評估了共軸復合式直升機和常規復合式直升機的性能,并與傳統直升機進行比較。結果表明,常規復合式比傳統直升機消耗更多功率,為降低高速時的阻力,復合式直升機需要優化機身設計。M.W.Floros 等[6]采用CAMRAD Ⅱ軟件計算了降速旋翼的復合式直升機性能,高速下自轉旋翼的最優總距發生在旋翼產生少量正拉力時,減慢旋翼轉速可降低復合式直升機的需用功率。楊克龍等[7]以加裝機翼和螺旋槳的UH-60A直升機為例,探討了機翼和螺旋槳參數、升推力分配對全機性能的影響機理。性能優化方面,O.Rand等[8]引入“阻力/功率圖”和基于非線性自由尾跡分析方法的優化策略,分析表明復合式直升機的最優配置依賴于旋翼、推進器和機翼的效率。S.Hersey等[9]提出一種將基本優化問題轉化為一系列近似優化問題求解的多目標優化方法,在帶有升推力裝置的共軸復合式直升機模型上進行了應用。此優化方法魯棒性好,能夠處理多個局部最優問題。王坤等[10]采用基于6σ 設計的改進多目標遺傳算法對共軸復合式直升機的總體參數進行優化,優化后的復合式直升機飛行性能得到較大改善。C.Lienard等[11]對RACER驗證機的垂尾外形采用基于多保真算法的外形修正及優化策略,修正后的垂尾能有效地降低氣流分離,滿足設計要求。
本文在已有直升機飛行性能分析模型基礎上,引入Young曲線擬合和動量葉素理論對懸停和低速下產生負拉力的螺旋槳建立氣動模型,以樣機X3直升機總功率為優化目標,選用旋翼、螺旋槳等部件參數為優化變量,構建基于遺傳算法的性能優化模型,分析不同飛行狀態優化后直升機性能,并研究基于遺傳算法的參數優化對常規復合式直升機的各類功率和操縱量等特性的影響。
1 復合式直升機建模及性能計算
1.1 復合式直升機飛行性能分析模型
本文建立的常規復合式直升機模型由旋翼、螺旋槳、機翼、機體和平尾、垂尾6 部分構成。懸停和低速時,左右螺旋槳的拉力相等但方向相反,以平衡旋翼反扭矩;飛行速度超過210km/h后,兩側螺旋槳均提供正前進力,利用垂尾側向力去抵消反扭矩。旋翼模型以葉素理論為基礎,根據Pitt-Peters 動態入流理論[12]計算誘導速度,由槳葉慣性力、離心力和氣動力對揮舞鉸力矩平衡求解槳葉揮舞角,最后進行數值積分得到旋翼槳轂力和力矩。機翼、平尾和垂尾基于升力線理論[13]建立氣動模型。由參考文獻[14]確定機身阻力,體現前飛時機體模型對廢阻功率和配平的影響。產生正向拉力的螺旋槳建模方法[15],采用動量葉素理論[16-18]得到螺旋槳力和力矩。
當螺旋槳產生負向拉力時,隨著前飛速度的增大,螺旋槳會依次經歷渦環、湍流和風車狀態。本文采用Young 曲線擬合[19]結合動量葉素理論方法建立產生負拉力的螺旋槳模型。圖1為由Young曲線擬合給出負拉力螺旋槳的軸向誘導速度。
假定V0為來流速度,vi為實際飛行狀態下螺旋槳槳盤處的誘導速度,vh為懸停狀態下的槳盤處誘導速度。Young曲線擬合得到的渦環和湍流狀態的誘導速度分別為
式中,螺旋槳的理想自轉條件為V0= 1.75vh。

圖1 Young曲線擬合求解誘導速度Fig.1 Young curve fitting to solve for induced velocity
若以較大速度前飛,螺旋槳處于氣流穩定的風車狀態,螺旋槳模型基于動量葉素理論建立。
距離螺旋槳槳盤中心rp、寬度為drp的環帶軸向速度va和周向誘導速度vb分別為
式中,V0為來流速度;dTp和dQp為螺旋槳環帶的拉力和扭矩。
根據前飛速度確定螺旋槳狀態,將初始后由葉素理論得到的環帶拉力和扭矩,代入式(1)~式(4)計算新的軸向和周向誘導速度。通過不斷修正軸向和周向誘導速度,直至迭代收斂確定螺旋槳各剖面的力和力矩,進行數值積分后得到螺旋槳總拉力和總扭矩。
復合式直升機的配平方程求解見參考文獻[20]。由經驗公式給定初始操縱量和姿態角后,利用牛頓迭代法求解近似根直至收斂,得到配平后各部件氣動力和力矩。與常規直升機總功率計算不同,復合式直升機總功率由旋翼功率和螺旋槳功率兩部分組成。
1.2 氣動部件模型驗證
采用UH-60A直升機的飛行試驗數據[21]驗證旋翼模型的正確性,其旋翼和尾槳的參數見參考文獻[22]、[23]。圖2給出了在直升機質量系數Cw分別為0.0065、0.0074時,旋翼功率系數的模型預測值與飛行數據的對比,預測值與試驗值數據吻合較好。
圖3給出了不同前進比時螺旋槳拉力系數和功率系數的模型預測值與飛行數據[24]的對比,驗證的螺旋槳相關參數見參考文獻[24]。將螺旋槳前進比定義為
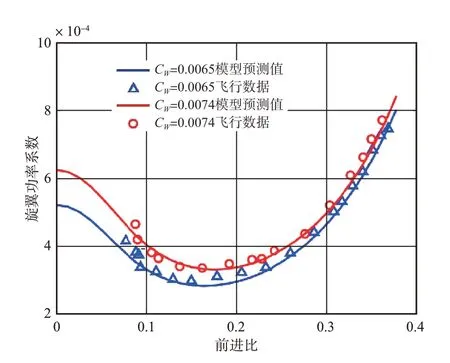
圖2 旋翼功率系數的預測值與試驗值對比Fig.2 Comparison of rotor power coefficient between prediction and test data
螺旋槳的拉力系數和功率系數分別為
式中,V0為來流速度;nP為螺旋槳轉速,DP為螺旋槳直徑。從圖3可以看出,預測值與試驗值數據吻合較好。

圖3 螺旋槳拉力系數和功率系數的預測值與試驗值對比Fig.3 Comparison of propeller thrust and power coefficient between prediction and test data
2 性能優化模型
遺傳算法是模仿自然界生物進化機制而發展起來的隨機全局搜索和優化方法[25]。通過對算法中的種群個體進行編碼,確定好適應度函數后再進行選擇[26]、交叉[27-28]和變異[29]操作,不斷進化得到滿足條件的最優個體或最優適應度。
本文以X3 復合式直升機的總功率為優化目標即適應度函數,選用旋翼、螺旋槳、機翼和平尾部件的特征參數為優化變量,基于遺傳算法建立復合式直升機的性能優化模型。樣機的原始參數見參考文獻[15],優化變量中旋翼和螺旋槳的半徑、機翼和平尾的展長、面積在原值20%范圍內,而旋翼和螺旋槳的槳尖速度是由槳尖速度不超過聲速和平衡最大最小值與基準值的差值而定的,變量取值范圍見表1。性能優化流程如圖4所示,最終得到直升機的最優功率和優化后的變量值。
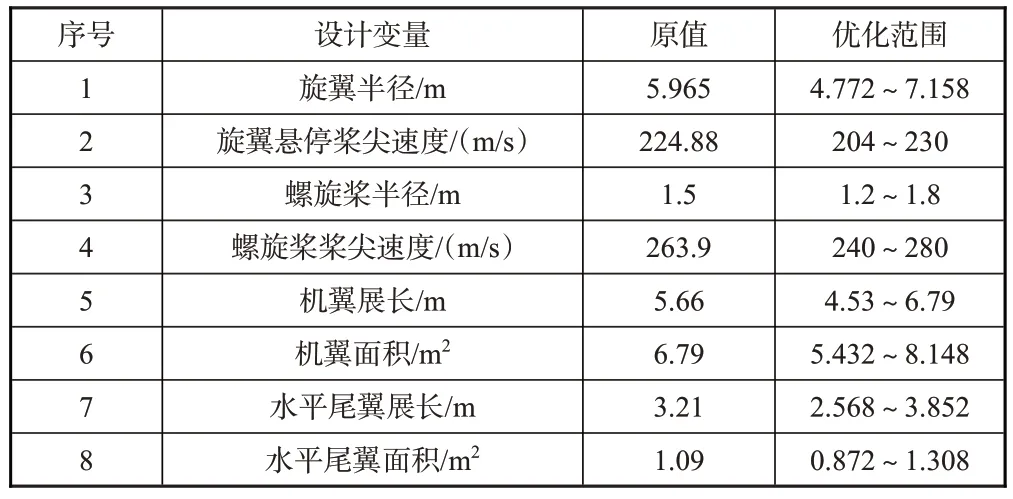
表1 優化變量取值范圍Table 1 Ranges of optimized variable values

圖4 復合式直升機性能優化流程Fig.4 Compound helicopter performance optimization process
3 復合式直升機性能優化結果與分析
為得到復合式直升機的最優功率,選取懸停階段、低速階段200km/h和高速階段400km/h三個不同飛行狀態分別進行基于遺傳算法的性能優化。優化過程如圖5所示,懸停、200km/h、400km/h下復合式直升機最優總功率隨著迭代步數的增加而降低,基本在進化代數為40 時收斂。圖6~圖8 為懸停、200km/h 和400km/h 優化前后三種功率與樣機基準值的對比。優化后三個不同飛行速度下對應的復合式直升機總功率、旋翼總功率、螺旋槳總功率均有降低。懸停、200km/h、400km/h優化后的直升機總功率比基準值要低16.3%、10.9%和19.6%。而旋翼的總功率分別降低了12.5%、10.3%和80.4%,其中對400km/h 優化后的旋翼從氣流中吸收了大量能量,旋翼功率降低顯著。三者優化后的螺旋槳總功率依次降低了22.9%、12.4%和6.7%。

圖5 懸停、200km/h、400km/h的性能優化過程Fig.5 Performance optimization process for hover,200km/h and 400km/h

圖6 優化前后懸停、200km/h、400km/h直升機總功率Fig.6 Total helicopter power before and after optimization of hover, 200km/h and 400km/h
表2 為懸停、200km/h、400km/h 優化前后對應的變量值。懸停時,誘導功率是旋翼和螺旋槳總功率的主要組成部分,懸停優化后旋翼和螺旋槳半徑均增大并轉速降低;200km/h 優化后的旋翼參數變化趨勢與懸停相同,而螺旋槳參數變化趨勢相反,機翼展長和面積增加;而高速時誘導功率小于型阻功率,400km/h 優化后旋翼和螺旋槳半徑均減小但轉速增大,機翼展長和面積減小。

圖7 優化前后懸停、200km/h、400km/h旋翼總功率Fig.7 Total rotor power before and after optimization of hover,200km/h and 400km/h
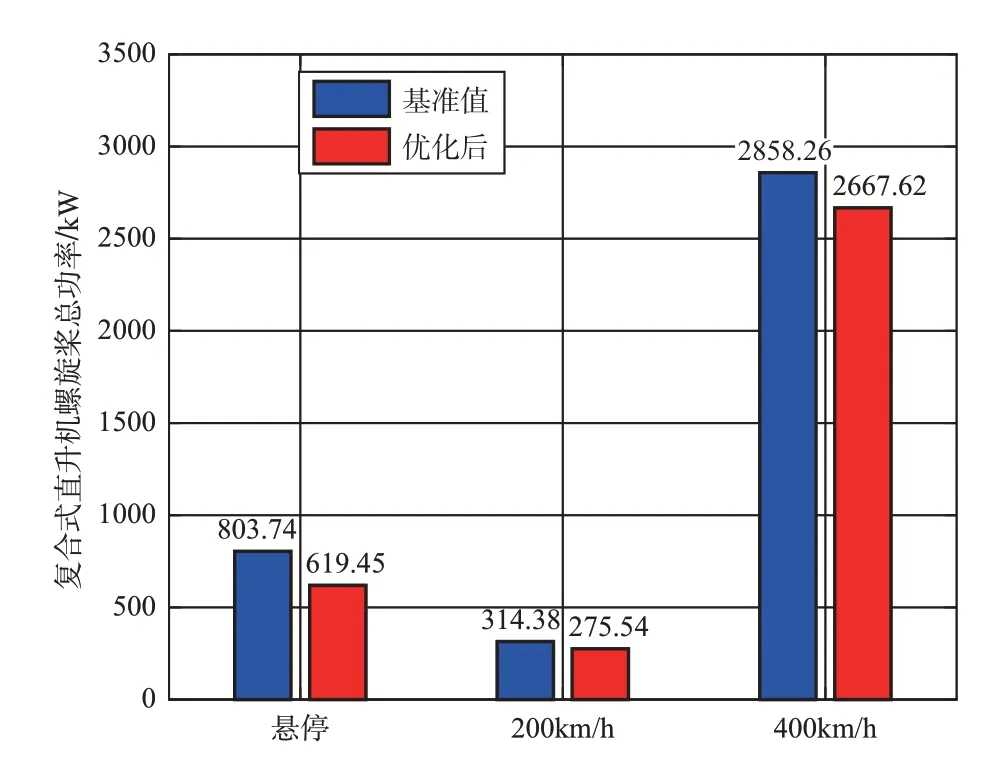
圖8 優化前后懸停、200km/h、400km/h螺旋槳總功率Fig.8 Total propeller power before and after optimization of hover, 200km/h and 400km/h
圖9~圖11 為0~450km/h 內,采用基準值與懸停、200km/h和400km/h優化變量值分別得到的直升機總功率、旋翼和螺旋槳總功率變化。復合式直升機在高速前飛時機體是保持水平姿態的,但由于懸停狀態優化后機翼展長和面積顯著增加,機翼產生了過多升力,使旋翼和機翼產生的總升力大于全機總重力,導致機體無法繼續維持水平飛行,視為配平失敗。因此,得到懸停狀態優化后的直升機最大平飛速度僅為430km/h。由懸停狀態下優化參數值得到的直升機總功率和旋翼總功率在低速階段有很好的優化效果,功率節省率高于200km/h和400km/h。而采用400km/h優化參數值得到的直升機總功率和旋翼總功率在低速時均高于基準值,當速度超過350km/h 后總功率最低,功率節省率最高。速度為450km/h時,由400km/h優化值得到的直升機、旋翼總功率分別為3918.77kW、313.96kW,功率節省率為20.0%、67.8%,高于由200km/h 優化值得到的16.6%、35.0%。采用200km/h優化參數值得到的旋翼總功率在0~450km/h內均低于基準值,有全局優化效果,并且在高速時螺旋槳總功率優化效果最優。

表2 懸停、200km/h、400km/h優化前后對應的變量值Table 2 Variable values corresponding to before and after optimization of hover, 200km/hand 400km/h
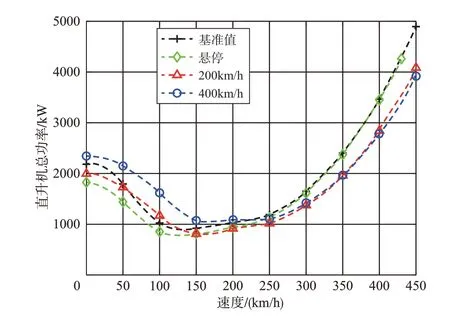
圖9 0~450km/h基準與優化變量值的直升機功率Fig.9 Total helicopter power at baseline and optimized variable values in 0~450km/h

圖10 0~450km/h基準與優化變量值的旋翼總功率Fig.10 Total rotor power at baseline and optimized variable values in 0~450km/h
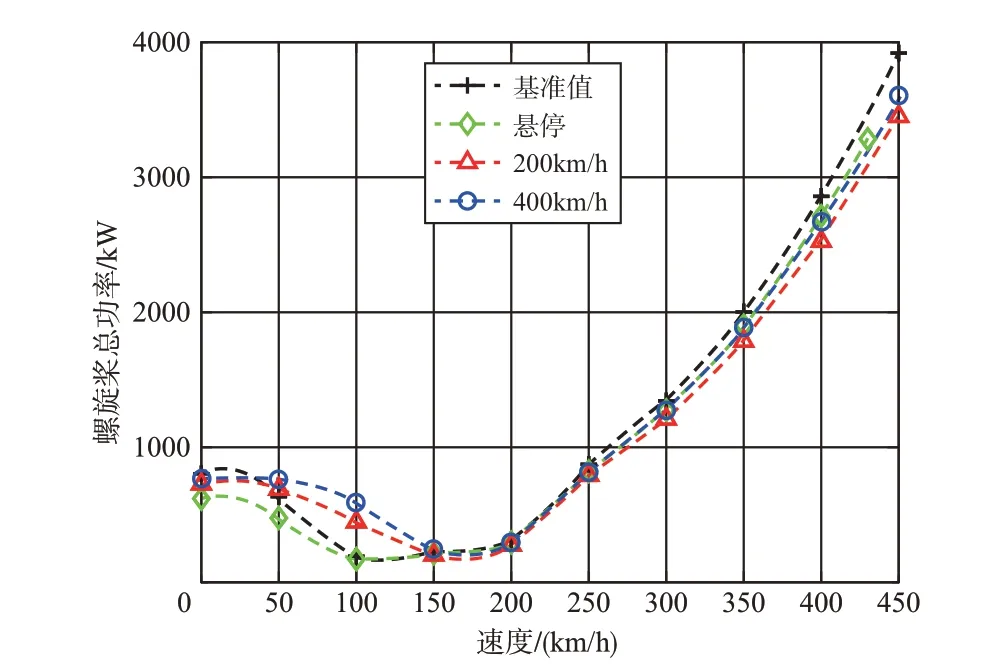
圖11 0~450km/h基準與優化變量值的螺旋槳功率Fig.11 Total propeller power at baseline and optimized variable values in 0~450km/h
圖12 和圖13 給出了0~450km/h 內基準值與優化變量值得到的左右側螺旋槳功率變化。當速度小于210km/h時,懸停的螺旋槳半徑增加而轉速降低,使得螺旋槳的誘導功率減小,左側螺旋槳總功率降低,在100~200km/h范圍內進入自轉狀態。而200km/h 和400km/h 優化后的螺旋槳半徑減小,增大了懸停狀態下的槳盤誘導速度,使得左側螺旋槳開始進入自轉狀態時的飛行速度增加。右側螺旋槳功率在低速時變化很小。速度超過210km/h 后,左右側螺旋槳產生相等的正拉力,螺旋槳功率消耗隨速度增加而增加,采用懸停、200km/h和400km/h優化參數值得到的螺旋槳功率均低于基準值。
圖14~圖16 給出了0~450km/h 內基準值與優化變量值下的總距、橫向和縱向周期變距。低速時,機翼升力占比很小,由旋翼提供絕大部分升力,如圖17 所示,由于對400km/h優化后得到的旋翼半徑和懸停槳尖速度減小,因此為提供足夠的拉力,采用400km/h優化參數值的旋翼總距顯著增大,而懸停階段優化后的則相反。由圖17可得,速度大于210km/h 后,機翼升力隨速度增加而快速增大,由于400km/h優化后的機翼面積和展長均減小,機翼產生的升力變小,機翼升力占比低于基準值,400km/h 的旋翼升力占比最大,故400km/h優化后旋翼總距依舊高于基準值。采用200km/h和400km/h優化參數值得到的橫向周期變距在0~450km/h范圍內基本比基準值要小。圖16表明,速度超過210km/h后,由于左右螺旋槳均產生正拉力來提供飛行時的前進力,因此旋翼作用明顯減弱,縱向周期變距會隨速度增加而減小,高速時降至負值。圖18 為旋翼的后倒角,當左右螺旋槳均產生正拉力時,旋翼槳盤由前傾變為后倒,此時螺旋槳除了克服機身阻力外,還需平衡旋翼向后的水平力。300km/h 時,采用400km/h 優化后的參數值得到的后倒角高于基準值,懸停、200km/h 優化后的后倒角比基準值要低。由圖16 可得,這時三者優化后的縱向周期變距接近為0,意味著對400km/h 優化后的由吹風揮舞引起的槳盤后倒角更大。低速時,三者優化后的旋翼后倒角與基準值基本一致,但400km/h優化后由吹風揮舞造成的后倒角比基準值高,使得旋翼的縱向周期變距會相應增加。
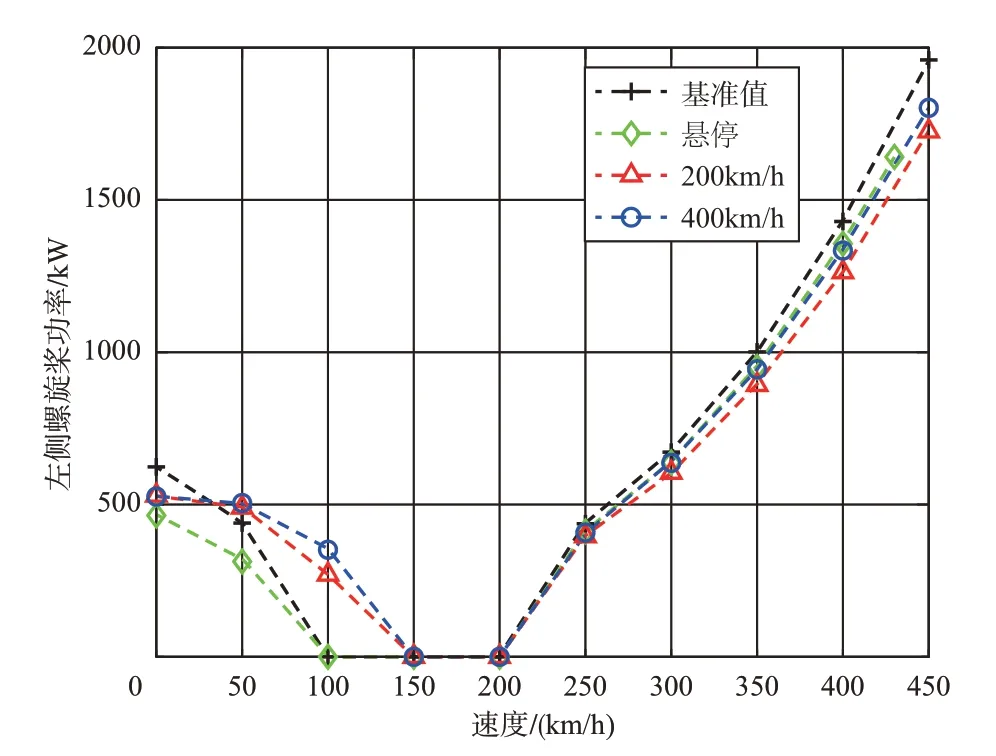
圖12 0~450km/h基準值與優化變量值的左側螺旋槳功率Fig.12 The left propeller power at baseline and optimized variable values in 0~450km/h

圖14 0~450km/h基準值與優化變量值下的旋翼總距Fig.14 Collective pitch at baseline and optimized variable values in 0~450km/h

圖15 0~450km/h基準值與優化變量值下的旋翼橫向周期變距Fig.15 Lateral cyclic pitch at baseline and optimized variable values in 0~450km/h
圖19 和圖20 給出了0~450km/h 范圍內基準值與優化變量值下的左右側螺旋槳總距。低速時,由于左側螺旋槳狀態較為復雜,左側螺旋槳總距變化較大。左右螺旋槳位于機翼翼梢處,因此低速時螺旋槳的拉力大小受旋翼反扭矩和機翼展長的影響。400km/h 優化后的旋翼反扭矩減小,但機翼展長也在減小,使得400km/h優化后的螺旋槳拉力比基準值大,并且優化后的螺旋槳半徑減小,導致右側螺旋槳的總距需要增加,左側螺旋槳總距的變化趨勢則相反。當左側螺旋槳進入自轉狀態后,三者優化后的螺旋槳總距與基準值相近。速度大于210km/h 后,左右側螺旋槳的總距相等,采用懸停、200km/h 和400km/h 優化參數值得到的螺旋槳總距均比基準值高。

圖16 0~450km/h基準值與優化變量值下的旋翼縱向周期變距Fig.16 Longitudinal cyclic pitch at baseline and optimized variable values in 0~450km/h

圖17 0~450km/h基準與優化變量值的機翼升力占比Fig.17 Wing liftshare at baseline and optimized variable values in 0~450km/h
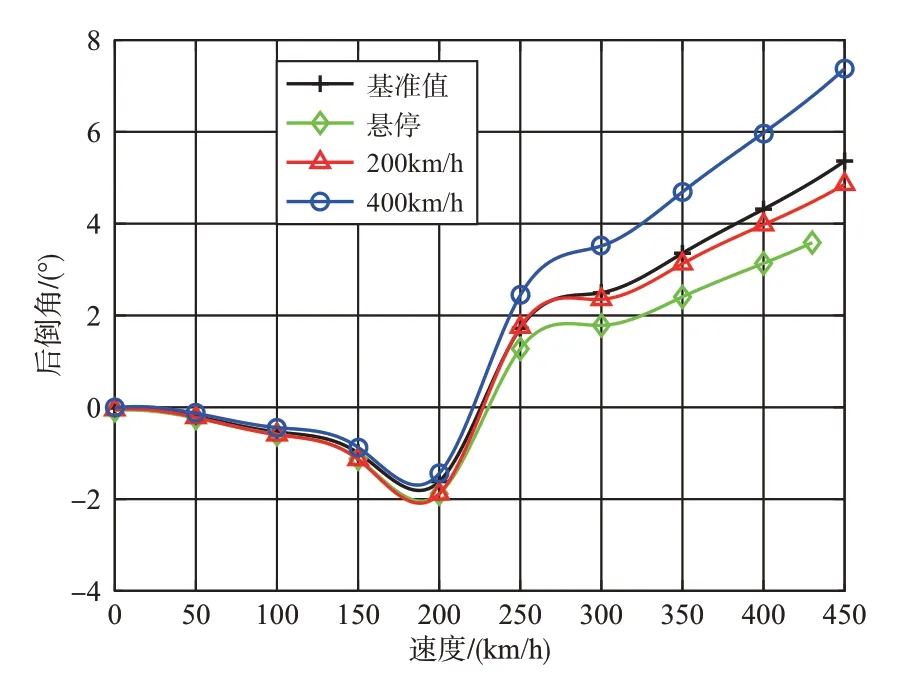
圖18 0~450km/h基準值與優化變量值的旋翼后倒角Fig.18 The angle of backward tilt at baseline and optimized variable values in 0~450km/h
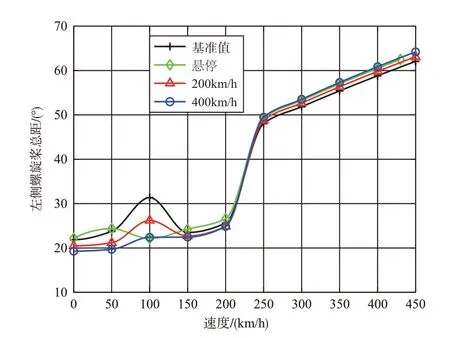
圖19 0~450km/h基準值與優化變量值的左側螺旋槳總距Fig.19 Collective picth of the left propeller at baseline and optimized variable values in 0~450km/h

圖20 0~450km/h基準值與優化變量值的右側螺旋槳總距Fig.20 Collective picth of the right propeller at baseline and optimized variable values in 0~450km/h
圖21~圖22為0~450km/h范圍內基準值與優化變量值下的機體俯仰角和滾轉角。懸停、200km/h和400km/h優化后的俯仰角在0~450km/h內與基準值基本一致。速度小于210km/h時,通過機體低頭和旋翼前傾提供前進推力,俯仰角隨速度增加而增大,而后由螺旋槳提供前進力,機體接近水平。此時旋翼反扭矩由垂尾產生的側向力平衡,圖23給出250~450km/h范圍內基準值與優化變量值下的垂尾側向力變化。由于400km/h 優化后的旋翼反扭矩降低,垂尾需要提供的側向力減小,機體滾轉角會比基準值小,對懸停階段優化后的滾轉角則相反。
4 結論
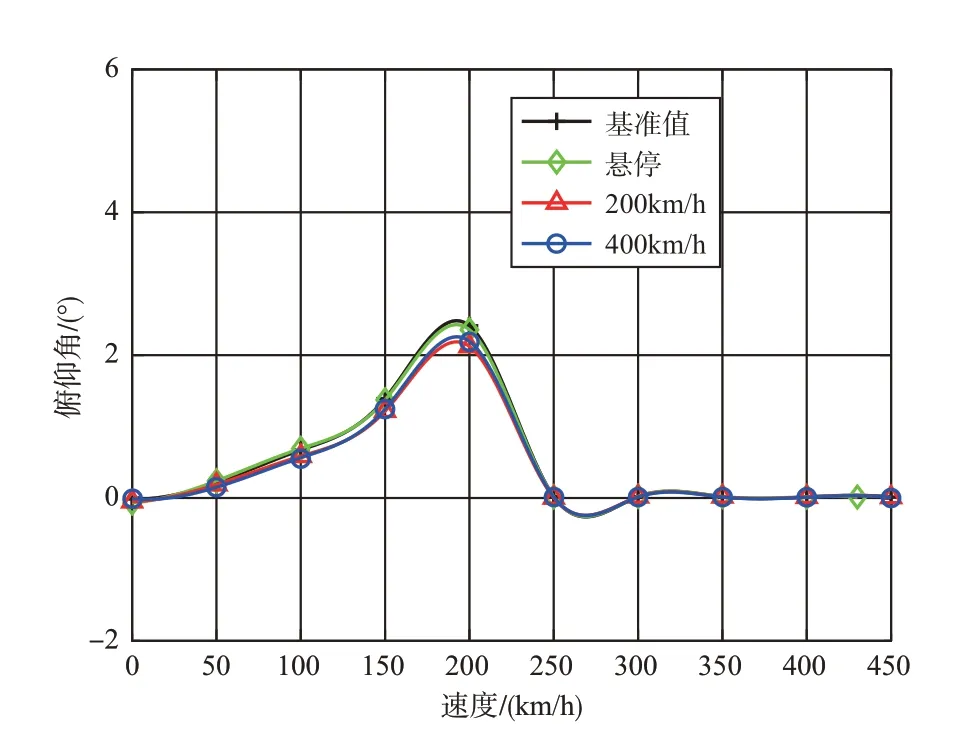
圖21 0~450km/h基準值與優化變量值的俯仰角Fig.21 Pitch angle at baseline and optimized variable values in 0~450km/h

圖22 0~450km/h基準值與優化變量值的滾轉角Fig.22 Roll angle at baseline and optimized variable values in 0~450km/h

圖23 250~450km/h基準與優化變量值的垂尾側向力Fig.23 Lateral force of the vertical tail at baseline and optimized variable values in 250~450km/h
本文將Young 曲線擬合方法和動量葉素理論相結合,對懸停和低速階段產生負向拉力的螺旋槳建立氣動模型,以復合式直升機X3為樣機構建了性能優化模型,分析了懸停、低速200km/h和高速400km/h三個不同飛行階段優化前后的各類功率、操縱量和姿態角變化,給出了基于遺傳算法的參數優化對常規復合式直升機飛行性能的影響規律,得到以下結論:
(1) 針對復合式直升機在特定飛行速度下的功率最優問題,采用基于遺傳算法的參數優化方法是可行的。為兼顧高低速下的直升機性能,可選用加權的目標函數進行性能優化研究。
(2) 高速時最優直升機總功率主要依賴優化旋翼部件,通過顯著降低旋翼總功率來實現。旋翼和螺旋槳半徑均減小但轉速增大,并配置更小的機翼是高速400km/h 的優化參數趨勢。
(3)懸停狀態的優化參數趨勢和操縱量變化與400km/h優化后相反,而200km/h優化后的旋翼參數變化趨勢與懸停狀態一致,螺旋槳參數變化趨勢則相反。三者優化后的俯仰角在0~450km/h范圍內與基準值基本一致,在螺旋槳均提供正拉力后機體為水平姿態但旋翼槳盤會后倒。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45