兩相交錯并聯(lián)雙向DC-DC 變換器研究
2023-09-27 10:43:10石樂樂高昕
電子制作 2023年19期
石樂樂,高昕
(安徽理工大學(xué) 電氣與信息工程學(xué)院,安徽淮南,232001)
0 引言
隨著電子技術(shù)的不斷進步,電動車、風(fēng)力發(fā)電、太陽能等新能源設(shè)備的快速發(fā)展,越來越多的系統(tǒng)需要高效、穩(wěn)定、可靠的直流-直流(DC-DC)變換器來滿足其能量轉(zhuǎn)換和能量管理需求。而交錯并聯(lián)雙向DC-DC 變換器由于其高效能、高可靠性、低成本和多功能性等優(yōu)點而被廣泛應(yīng)用[1]。
傳統(tǒng)的雙向DC-DC 變換器功率等級低且輸出電流、電壓脈動較大。交錯并聯(lián)雙向DC-DC 變換器能允許能量雙向流動的情況下降低輸出紋波提高輸出功率,交錯并聯(lián)雙向DC-DC 變換器也具有靈活布局和快速響應(yīng)的特點因此在新能源汽車、電網(wǎng)儲能系統(tǒng)等應(yīng)用中具有廣泛的應(yīng)用前景,已經(jīng)成為研究和應(yīng)用領(lǐng)域的熱點之一[2~4]。
本文以雙向半橋變換器為基礎(chǔ)拓撲,進行交錯并聯(lián)得到兩相交錯并聯(lián)雙向DC-DC 變換器,該變換器拓撲所需元件少,不需電氣隔離,采用電壓、電流雙閉環(huán)控制方式,均流效果好紋波小,且變換器在雙閉環(huán)控制下具有良好性能。
1 變換器拓撲結(jié)構(gòu)及原理分析
圖1 所示為雙向半橋DC-DC 變換器,該拓撲結(jié)構(gòu)簡易,僅需兩個開關(guān)管、一個電感,并且不需要傳輸電容,對比其它變換器拓撲,雙向半橋變換器的電壓應(yīng)力和電流應(yīng)力均為最小。又根據(jù)導(dǎo)通損耗公式P=,ID為電流有效值,R為等效電阻,可知雙向半橋變換器的導(dǎo)通損耗更小。

圖1 雙向半橋DC-DC 變換器拓撲結(jié)構(gòu)
兩相交錯并聯(lián)雙向DC-DC 變換器拓撲結(jié)構(gòu)如圖2 所示,該拓撲是兩個雙向半橋變換器交錯并聯(lián)得到,該變換器開關(guān)管電流、電壓應(yīng)力小,導(dǎo)通損耗低,能夠有效降低電流紋波。Q1~Q4是MOSFET 開關(guān)管其中Q1和Q3為降壓管,Q2和Q4為升壓管,D1~D4為相應(yīng)開關(guān)管反并聯(lián)的續(xù)流二極管,U1是低壓側(cè),U2為高壓側(cè),L1和L2為儲能電感,C1、C2是濾波電容[5]。相鄰橋臂開關(guān)管在每一周期導(dǎo)通時間相同,且兩相相位相差180 度導(dǎo)通,該拓撲有Boost 和Buck 兩種工作方式,本文以占空比D<0.5 為例分析其工作原理。
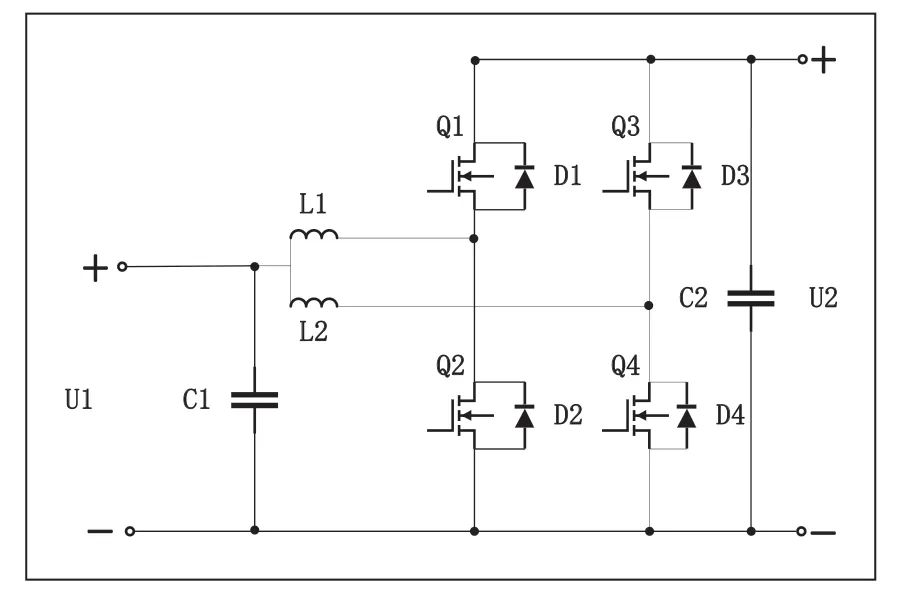
圖2 兩相交錯并聯(lián)雙向DC-DC 變換器拓撲結(jié)構(gòu)
■1.1 Buck 工作模式原理分析
當(dāng)變換器處于Buck 工作模式下,能量由高壓側(cè)向低壓側(cè)流動,U2為輸入側(cè),U1為負載側(cè),1Q、3Q作為降壓開關(guān)管相位相差180 度導(dǎo)通,Q2、Q4處于截止?fàn)顟B(tài),此模式下變換器有四個工作階段,圖3 詳細給出了四個階段的等效電路圖和電流流向,其中加粗部分代表不同階段電路的走向和電感電流流向。
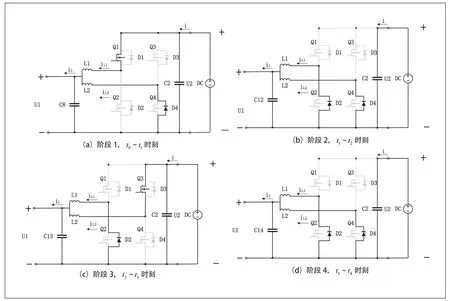
圖3 Buck 模式下不同工作階段等效電路
階段1(t0~t1):t0時刻開關(guān)管Q1導(dǎo)通Q3關(guān)斷,此時電感L1通過直流電源進行充電,iL1逐漸上升直至t1時刻結(jié)束;電感L2放電,iL2通過Q4反并聯(lián)的二極管D4續(xù)流逐漸降低。總電流iL為兩電感電流之和呈上升趨勢。此階段有(1)、(2)所示關(guān)系:
階段2(t1~t2):t1時刻開關(guān)管Q1關(guān)斷,電感L1放電,iL1通過Q2反并聯(lián)的二極管D2續(xù)流逐漸降低;iL2通過Q4反并聯(lián)的二極管D4續(xù)流繼續(xù)降低直至t2時刻。總電流iL呈下降趨勢。此階段有(3)、(4)所示關(guān)系:
階段3(t2~t3):t2時刻開關(guān)管Q3導(dǎo)通,此時電感L2通過直流電源進行充電,iL2逐漸上升直至t3時刻結(jié)束;整個階段Q1關(guān)斷電感L1放電,iL1通過Q2反并聯(lián)的二極管D2續(xù)流逐漸降低,總電流iL呈上升趨勢。此階段有(5)、(6)所示關(guān)系:
階段4(t3~t4):t3時刻開關(guān)管Q3關(guān)斷,電感L2放電,iL2通過Q4反并聯(lián)的二極管D4續(xù)流降低;電流iL1通過Q2反并聯(lián)的二極管D2續(xù)流繼續(xù)降低到t4時刻結(jié)束,總電流iL呈下降趨勢,至t4時刻Buck 模式一個工作周期結(jié)束。此階段與階段2 的(3)、(4)關(guān)系式一致。
為簡化運算,令開關(guān)管占空比均為D,電感L1=L2=L,根據(jù)電感的伏秒平衡以及圖4 變換器工作波形Buck 模式下有關(guān)系式(7):

圖4 兩相交錯并聯(lián)雙向DC-DC 變換器降壓(升壓)工作波形圖
其中 1LiΔ 和ΔiL2分別是電感L1和電感L2的紋波,ΔiL為總電感電流紋波,AV是電壓增益,T 為采樣周期。
■1.2 Boost 工作模式原理分析
當(dāng)變換器處于Boost 工作模式下,能量由低壓側(cè)向高壓側(cè)流動,U1為輸入,U2為輸出側(cè),Q2、Q4相差180 度交替導(dǎo)通,Q1、Q3關(guān)斷。工作原理與Buck 工作模式一致,可簡要概括為Q2導(dǎo)通、關(guān)斷;Q4導(dǎo)通、關(guān)斷。
令開關(guān)管占空比均為D,電感L1=L2=L,根據(jù)電感的伏秒平衡以及圖4變換器工作波形,Boost模式下有關(guān)系式(8):
其中ΔiL1和ΔiL2分別是電感L1和電感L2的紋波,ΔiL為總電流電流紋波,AV是電壓增益,T 為采樣周期。
2 控制策略
電壓單環(huán)控制由于只控制電壓,不能同時控制電流,因此精度較低,容易出現(xiàn)誤差且響應(yīng)速度慢穩(wěn)定性差。電壓電流雙環(huán)控制可以同時對電壓和電流進行控制和調(diào)節(jié),響應(yīng)速度較快,可以大大提高控制精度,減小誤差,能夠適應(yīng)不同場合并且雙環(huán)控制穩(wěn)定性好。對比分析選用控制效果更好的電壓電流雙環(huán)控制[6]。
電壓電流雙閉環(huán)控制系統(tǒng)結(jié)構(gòu)如圖5 所示,首先電壓電流雙閉環(huán)控制系統(tǒng)中包含了兩個控制環(huán)節(jié),即電壓環(huán)和電流環(huán)。其次,電壓環(huán)是外環(huán),用于控制輸出電壓,而電流環(huán)是內(nèi)環(huán),用于將輸出電流與給定電流進行比較,從而調(diào)節(jié)電壓環(huán)的輸出電壓。參考電壓與輸出電壓誤差作為電壓控制器的輸入,電流內(nèi)環(huán)的參考值則為電壓控制器的輸出,與采樣電流比較,兩者誤差是電流控制器的輸入,再將電流控制器的輸出和輸入的鋸齒波送至脈寬調(diào)制器,控制PWM 脈寬調(diào)制器輸出的占空比D 來控制開關(guān)管的導(dǎo)通和關(guān)斷,最終實現(xiàn)電壓外環(huán)電流內(nèi)環(huán)的雙閉環(huán)控制[7]。
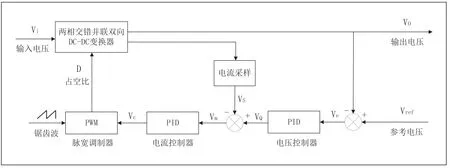
圖5 電壓電流雙閉環(huán)控制系統(tǒng)結(jié)構(gòu)圖
3 仿真實驗及分析
使用MATLAB/Simulink 軟件搭建兩相交錯并聯(lián)雙向DC-DC 變換器仿真模型,先對兩相交錯并聯(lián)雙向DC-DC 變換器在雙環(huán)控制下正常工作狀態(tài)進行仿真分析,最后對變換器加以擾動分析動態(tài)響應(yīng)特性。仿真模型所需參數(shù)如表1所示。

表1 仿真模型參數(shù)
■3.1 Buck 工作模式仿真與分析
Buck 模式正常工作狀態(tài)仿真與分析(見圖6、圖7)。

圖6 Buck 模式下輸出電流與單相電感電流波形
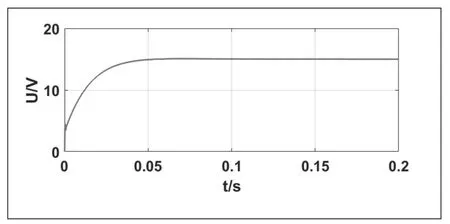
圖7 Buck 模式下15V 輸出電壓波形
Buck 模式下輸入36V 輸出15V,兩相電感電流iL1、iL2和總電感電流iL的輸出波形如圖6 所示,從波形圖中可以清晰看出兩相電感電流iL1、iL2大小相同,只是相位相差180 度,均流效果好,由于兩相電感電流iL1和iL2相互交錯所以能夠?qū)﹄娏骷y波起到抑制作用,從圖中可看出總電流iL的紋波大小明顯小于每一相電感電流,有利于輸出電壓的穩(wěn)定,降低電路損耗,通過計算得到iL的平均值是iL1、iL2的兩倍,能夠增大變換器功率等級。圖7所示為輸出電壓為15V 的波形圖,由圖7 可知當(dāng)輸出電壓為15V 時,電壓沒有超調(diào),0.05 秒左右達到穩(wěn)態(tài),變換器能穩(wěn)定工作且響應(yīng)速度快。
Buck模式變換器擾動狀態(tài)下仿真與分析(見圖8、圖9)。
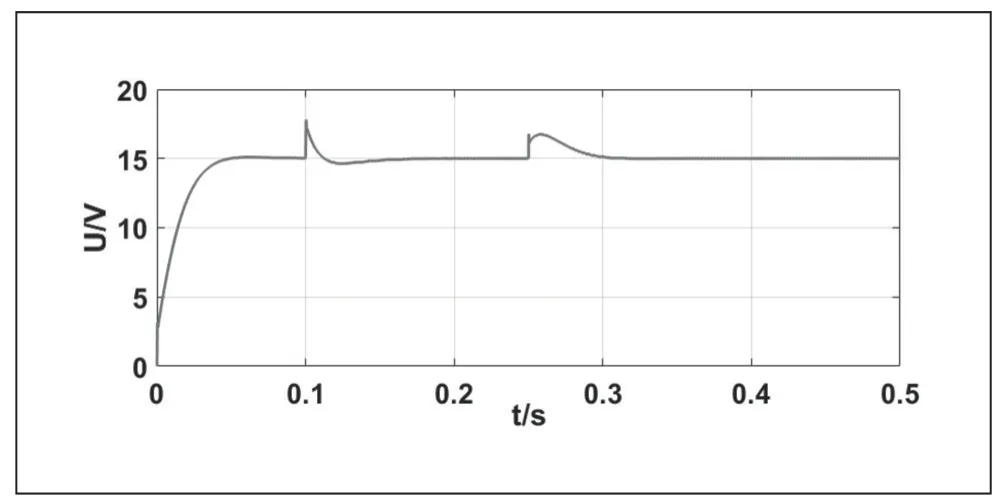
圖8 Buck 模式擾動狀態(tài)下輸出電壓波形

圖9 Buck 模式擾動狀態(tài)下總電感電流波形
在Buck 模式下給變換器添加兩種擾動,輸入電壓突變和負載電阻突變,圖8 是兩種擾動下變換器輸出電壓波形,圖9 是擾動狀態(tài)下總電感電流iL波形。起始時刻變換器在0.05 秒左右穩(wěn)定,0.1 秒輸入電壓36V 突變到48V 時變換器的輸出電壓有一個2.8V 左右的擾動沖量,調(diào)節(jié)時間約為0.04 秒,總電感電流的調(diào)節(jié)時間約為0.03 秒,穩(wěn)定后通過計算電流紋波約為12.3%;在0.25 秒時負載電阻突變,此時輸出電壓有一個1.8V 左右的沖量調(diào)節(jié)時間約為0.05 秒。總電感電流調(diào)節(jié)時間約為0.04 秒,再次穩(wěn)定后電流紋波約為17.2%左右。從仿真結(jié)果分析可知在雙環(huán)控制下,變換器工作在Bcuk 模式下受到干擾時輸出電壓不會有很大超調(diào),電流紋波也滿足本文參數(shù)需求,有良好的動態(tài)響應(yīng)特性,穩(wěn)定性強。
■3.2 Boost 工作模式仿真與分析
Boost 模式正常工作狀態(tài)仿真與分析(圖10、圖11)。

圖10 Boost 模式下電感總電流波形

圖11 Boost 模式下48V 輸出電壓波形
變換器工作在Boost 模式時兩相電感電流的均流效果與Buck 模式基本一致。變換器輸入電壓為12V 輸出電壓為48V,圖10 和圖11 分別為該模式下總電感電流波形和輸出電壓波形,由圖10 和圖11 可知總電感電流在0.03 左右時達到穩(wěn)定狀態(tài),輸出電壓在0.02 秒左右穩(wěn)定,通過計算電流紋波約為2.6%,電壓超調(diào)8.5V 左右,滿足變換器工作要求。
Boost 模式變換器擾動狀態(tài)下仿真與分析(見圖12、圖13)。
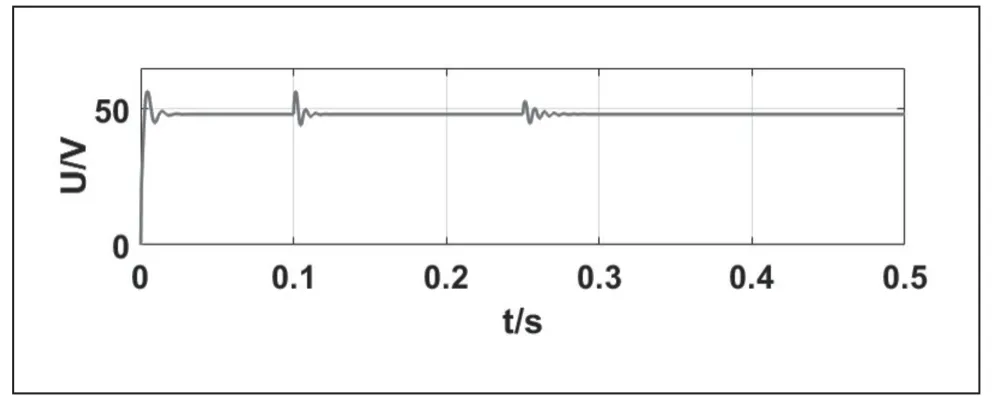
圖12 Boost 模式擾動狀態(tài)下輸出電壓波形
與Buck 模式一致給變換器加入輸入電壓突變和負載電阻突變兩種擾動:由圖12 和圖13 可知,初始時刻變換器在0.03 秒左右穩(wěn)定,0.1 秒當(dāng)輸入電壓由12V 突變至24V時變換器的輸出電壓有一個8.5V 左右的擾動沖量,調(diào)節(jié)時間約為0.02 秒后穩(wěn)定,總電感電流的調(diào)節(jié)時間約為0.025秒左右,穩(wěn)定后電流紋波約為4.2%;在0.25 秒時負載電阻突變,此刻輸出電壓的沖量為4.8V 左右調(diào)節(jié)時間約為0.03秒,總電感電流調(diào)節(jié)時間約為0.03 秒,再次穩(wěn)定后的電流紋波約為7.9%。從仿真結(jié)果分析可知變換器在雙閉環(huán)控制下,變換器工作在Bcuk 模式受到干擾時輸出電壓超調(diào)也不大,電流紋波同樣滿足參數(shù)需求,該模式下也有良好的動態(tài)響應(yīng)特性,抗干擾性強。
4 結(jié)語
雙向DC-DC變換器在電源系統(tǒng)中具有重要的應(yīng)用價值,本文從兩相交錯并聯(lián)雙向DC-DC 變換器的電路實現(xiàn)、工作原理和控制策略進行詳細分析。通過理論分析和仿真驗證,證明了兩相交錯并聯(lián)雙向DC-DC 變換器在雙環(huán)控制下電流紋波較小、均流效果好具有較好的輸出穩(wěn)定性,且動態(tài)響應(yīng)速度快,具有良好性能,可以滿足不同電源系統(tǒng)的要求,為儲能系統(tǒng)、混動汽車等應(yīng)用背景的雙向DC-DC 變換提供一種解決方案。
