
基于綠色農業的智能噴藥機器人的設計與應用
2023-10-10 18:44:23申賓德崔玉萍徐生龍
甘肅農業科技 2023年9期
申賓德 崔玉萍 徐生龍



摘要:隨著農業生產的發展,傳統的噴藥方式存在著藥劑浪費、環境污染和作物質量下降等諸多問題。通過智能噴藥機器人的應用,提高農業噴藥的效率、減少藥劑的使用量和環境污染,以推動綠色農業發展和提高農產品質量。結合物聯網、大數據和人工智能等技術,設計了一款由底盤、四輪驅動機構、自動配藥裝置、噴藥裝置及智能控制器、傳感器等組成的噴藥智能機器人,能在不同路況下行走工作。通過圖像識別技術深度分析農作物所受病蟲害情況,通過控制模塊獲取速度傳感器、壓力傳感器及流量傳感器瞬時數值動態調整藥液濃度、噴藥壓力,實現噴藥過程平穩工作。該系統的設計為后續根據作物生長態勢精準靶向噴藥及遠距離噴藥等功能實現提供思路。
關鍵詞:綠色農業;智能噴藥機器人;物聯網;大數據;人工智能
中圖分類號:S224? ? ? ? ? ? ? ? 文獻標志碼:A? ? ? ? ? ? ? ? 文章編號:2097-2172(2023)09-0859-06
doi:10.3969/j.issn.2097-2172.2023.09.014
Design and Application of Intelligent Spraying Robots Based on
Green Agriculture
SHEN Binde, CUI Yupin, XU Shenglong
(Wuwei Vocational College, Wuwei Gansu 733000, China)
Abstract: With the development of agricultural production, traditional spraying methods are faced with many problems such as pesticide waste, environmental pollution, and decreased crop quality. Through the application of intelligent spraying robots, the efficiency of agricultural spraying could be improved, and the amount of chemicals used, and environmental pollution could be reducedso as to promote the development of green agriculture and improve the quality of agricultural products. By combining technologies such as the Internet of Things, big data, and artificial intelligence, an intelligent spraying robot is designed which consists of a chassis, four-wheel drive mechanism, automatic dispensing device, spraying device, intelligent controller, sensor, etc., and could walk and work under different road conditions. By using image recognition technology to deeply analyze the situation of diseases and pests that crops suffer from, the instantaneous values of speed sensors, pressure sensors, and flow sensors are obtained through control modules to dynamically adjust the concentration and spraying pressure of the pesticide solution, which achieves smooth operation during the spraying process. The design of this system provides ideas for the subsequent implementation of precise and targeted and long-distance spraying functions based on crop growth.
Key words: Green agriculture; Intelligent spraying robot; Internet of Things; Big data; Artificial intelligence
收稿日期:2023 - 07 - 16
基金項目:2023年武威職業學院校級科研項目(ZYY2023002)。
作者簡介:申賓德(1982? — ),男,甘肅武威人,副教授,碩士,主要從事農業機械裝備及控制工程的研究工作。Email: 119251219@qq.com。
通信作者:崔玉萍(1983? — ),女,甘肅武威人,副教授,碩士,主要從事物聯網及控制研究工作。Email: 119268827@qq.com。
綠色農業是一種以生態環境保護為導向,注重可持續發展的農業發展類型。其核心目標是實現高產、高效、高質、低耗、安全的農業生產方式[1 ],同時最大限度地減少對自然資源的損害和環境污染[2 ]。我國為農業大國,但農用機械技術應用相對落后,尤其果蔬噴藥類機械和技術應用尚未成熟,傳統的果蔬噴藥作業大多采用人工背負沉重藥箱噴灑藥液的方式,而該作業方式因作業人員近距離接觸藥液,且缺乏一定的保護裝置,在噴藥過程中極易造成人體傷害甚至中毒死亡,而濫用或過量使用農藥也給生態環境帶來很多危害。
近年來隨著科技發展,用于農業生產各種場景作業的農業機器人應運而生,如采摘機器人、移栽機器人、澆花機器人等智能機械。而智能噴藥機器人基于國外噴藥機器人通常以拖拉機牽引,大型機械為主,而國內噴藥機械缺乏個性化智能控制,價格較高等原因尚未推廣應用,因此目前我國大部分地區噴灑農藥依然采用傳統手工作業的方式,人們通過自身的經驗和感知,根據農藥說明書手工配兌農藥的比例和噴灑劑量,存在農藥配比濃度、噴灑劑量不均衡的現象,且手工作業存在覆蓋范圍小、工作效率低下、造成人力物力浪費以及農藥對噴灑作業人員的身體健康存在一定的危害等,各種農藥、廢棄污染源等使農業作業環境變差,操作人員在噴藥時容易中毒,導致工人不愿意給農作物噴藥。
基于以上因素分析,筆者研制了一款基于綠色農業發展的智能噴藥機器人,該設備能夠通過系統識別植物病蟲害的種類,系統將根據事先設定好的比例進行混合,根據所規劃的路徑進行工作,且農藥配比準確,噴灑均勻,也能夠避免對農藥噴灑人員的健康產生危害,減輕了人工,提高了工作效率。
1? ?智能噴藥機器人機械結構總體設計
1.1? ?智能噴藥機器人總體結構
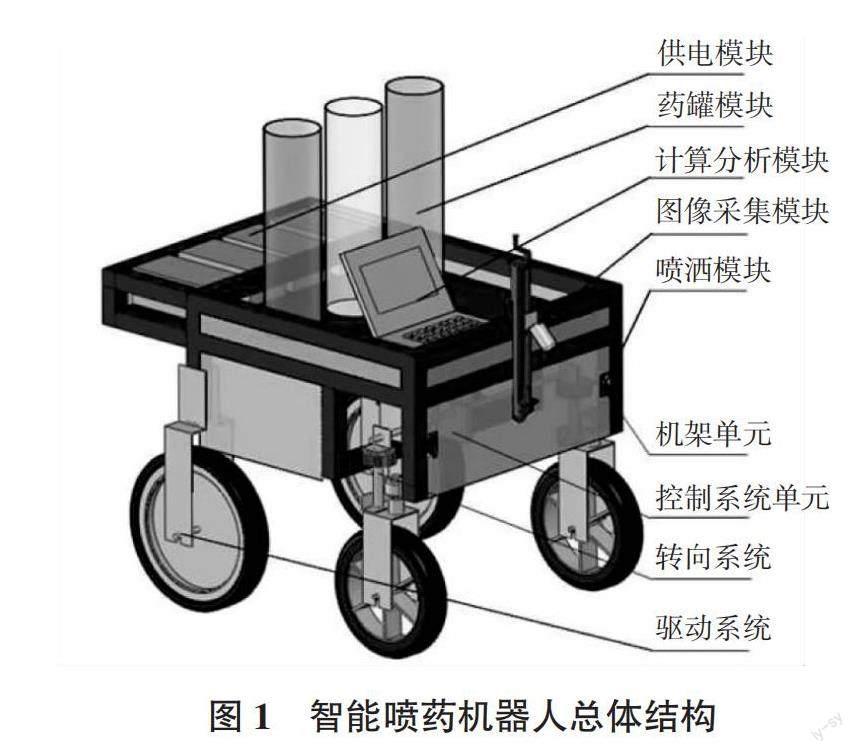
智能噴藥機器人主要由供電模塊、藥罐模塊、計算分析模塊、圖像采集模塊、機架單元、控制系統單元、轉向系統和驅動單元組成(圖1)。
1.2? ?機械結構設計思路
智能噴藥機器人是綠色農業中的重要裝備之一,其機械結構設計需要考慮機器人的移動性、穩定性和可靠性。結合噴藥機器人的實際工作環境,智能噴藥機器人的機械結構具備良好的移動和變向功能,并能夠適應田間地形和地勢。
1.3? ?關鍵結構設計
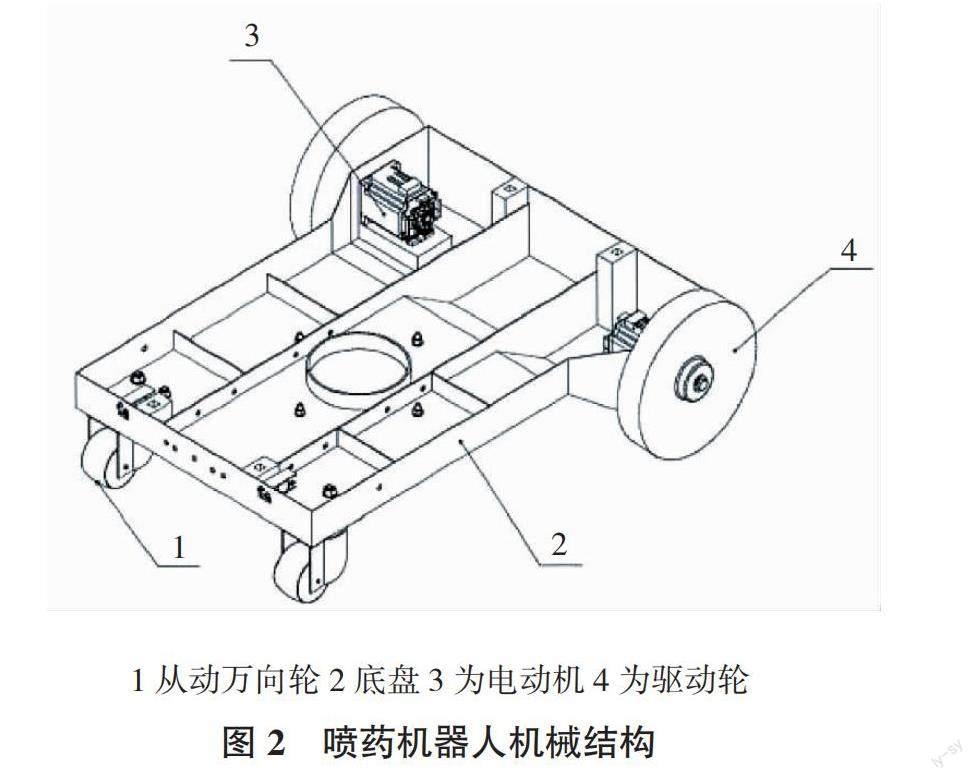
1.3.1? ? 行走機構機器人? ? 行走機構在工作中需在復雜的地面環境下能實現平穩直行、轉彎靈活,不碰撞農作物造成傷害。其底盤結構具有一定的承重能力,能夠承受藥液箱、各種監測傳感器及控制板等部件滿負荷狀態下的重量。行走驅動裝置能通過電池或電纜提供電力作為動力。目前機器人的行走方式主要有兩種,仿生機構(仿人或動物)及輪式或履帶式機構[3 ]。本設計采用了輪式驅動機構,輪式因速度快、運轉靈活被普遍應用,可實現在平穩直行、轉彎等動作。噴藥機器人驅動裝置如圖2所示,在驅動方式的選擇上選用控制較為簡便、靈活的后輪驅動,動力源為電動機。而前輪為從動萬向輪,主要作用是輔助移動和平衡支撐。
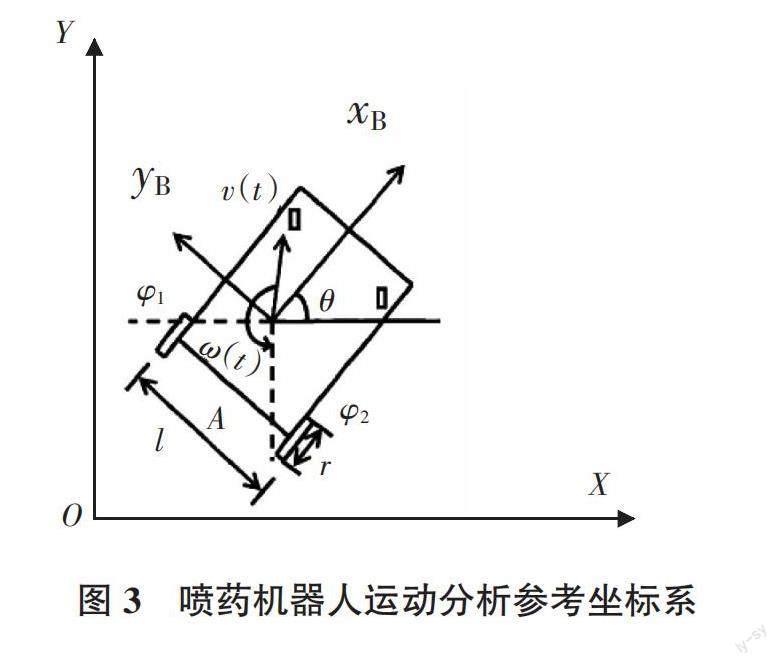
噴藥機器人的運動環境是理想的平面,忽略地面與地形的影響;噴藥機器人的輪子始終與地面保持垂直,僅存在單點接觸,且沒有相對滑動。噴藥機器人運動分析參考坐標系的XOY為全局坐標系,XOY為輪式噴藥機器人自身坐標系[4 ](圖3)。其中,A為驅動輪軸中心點,l為驅動輪間距,r為驅動輪直徑,v(t)為運動時機器人質心的線速度,ω(t)為質心的角速度,v1、v2為驅動輪速度[5 ],1、2為驅動輪轉速,運動學方式如公式所示。
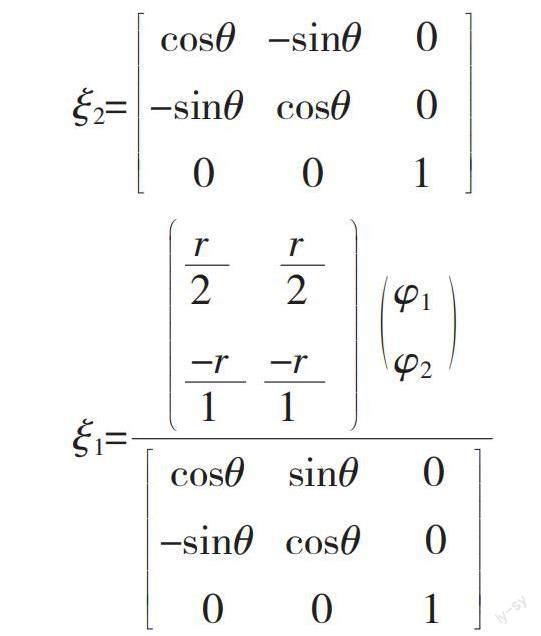
另外,需要將全局坐標系下的運動情況映射到噴藥機器人自身的坐標系中來構建噴藥機器人的運動學模型,即通過正交旋轉矩陣來實現相應的映射,如以下公式所示。
式中,ξ1代表全局坐標系下的運動狀態, ξ2代表自身坐標系下的運動狀態。噴藥機器人的運動學模型為其運動控制分析提供了理論基礎,為后續的智能控制系統設計提供必要的依據。
1.3.2? ? 藥液箱的設計與材質? ? 選用由于田間地勢平整度不高,噴藥機器人行走路況較為復雜,行走過程中會造成藥液箱大幅晃動或傾倒等問題,為防止藥箱內液體流通受限,在藥液箱內采用等距離三格隔板對內部空間進行分離。藥箱材料和隔板應選用重量輕且耐腐蝕性好的塑料箱體,降低噴藥機器人的自身負荷。本設計的藥液箱和隔板的材料均采用PE材料,常溫下耐酸堿腐蝕。藥液箱規格為500.0 mm×400.0 mm×300.0 mm,三格隔板后的規格為389.0 mm×161.9 mm×285.5 mm,體積約18 L。整體藥液箱包括進藥口、儲液箱體、水箱、隔板、出藥管等裝置。水箱安裝在儲液箱體的底部。分隔板豎直設置在儲液箱體內,上端與儲液箱體的頂部留有間隙,出水管的一端與水箱相連。出水管的另一端與三向閥相連,出水管上安裝有抽液泵,套筒環繞在儲液箱體的外側,通過第一進液支管與三向閥相連,管道設置在儲液箱體的出液室內,管道的一端通過第二進液支管與三向閥相連。本藥液箱設計結構簡單、便于制造和儲液。
2? ?智能噴藥機器人控制系統設計
2.1? ?智能噴藥機器人循跡控制系統設計
智能噴藥機器人的循跡控制系統包括機器人智能感應控制系統,電腦、手機監控機器人循跡及移位系統,遠程主控中央控制系統等三部分。為了進一步保證機器人噴藥的穩定性,安全性和精準性,整個系統采用遠程手動和智能自動控制完成(圖4)。
2.1.1? ? 機器人智能感應控制系統? ? 路徑規劃與導航循跡利用定位系統和環境感知裝置,機器人可以通過建立地圖和規劃路徑來實現自主導航。可以采用SLAM(同步定位與地圖構建)算法來建立環境地圖并規劃路徑[6 ],以實現機器人的自主避障和路徑規劃。為實現自動行走過程通過性高且按照較為簡單的運動路徑執行,本設計的智能機器人主要依靠自身安裝的工業相機、速度傳感器及角度傳感器來實現自身姿態和外部路徑及環境信息的感知,對于采集的數據經過融合并運用已有的經驗知識對環境空間的信息進行判斷從而尋找到高效或者近似于最優的無碰撞的路徑,實現安全快速地通行[7 ]。在兩行農作物間采用局部定位的方式,通過實時地收集處理傳感器采集機器人行走前方的圖像信息,進而獲得相對于兩側農作物的局部定位信息,最終實現該機器人自主避障及最優路徑自主導航行走。
2.1.2? ? 遠程主控中央控制系統? ? 通過物聯網技術、大數據技術實現機器人可以與中央控制系統進行實時通信和數據交換。用戶可通過人機交互界面完成機器人的遠程控制。主控中央控制系統擁有較高權限,可以隨時調整噴藥機器人參數和目標要求,切換當前工作狀態等。該智能機器人接收到中央控制系統的相關指令后,比對數據執行命令;同時中央控制系統具有對智能機器人統籌、管理、服務的功能。本設計的智能機器人也是遠程中央控制系統的終端設備,既可以智能控制實施噴藥,擁有一定的自主權,也需要由中央控制系統遠程監控實施,防止智能機器人出現故障或者突發狀態及時由遠程中央控制系統接管處理。
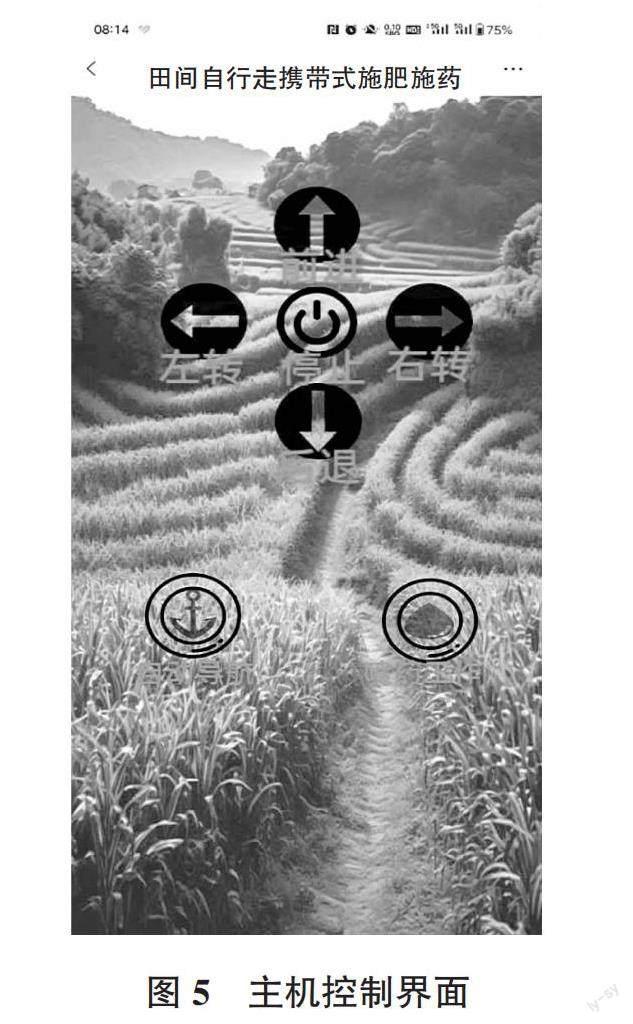
2.1.3? ? 電腦、手機監控機器人循跡及移位系統? ? 電腦、手機監控機器人循跡及移位系統是農戶或專業技術人員通過手機應用或電腦遠程監控機器人的工作狀況,并進行必要的調整和控制。結合智能噴藥機器人的基本結構設計和運動分析可知噴藥機器人將支持機器人的前進、后退、轉向以及調速。本設計的智能機器采用Blinker 自定義組件布局,按照當前的需要,可遠程操作機器人循跡及移位控制、變量噴藥控制等多個功能,其主機界面如圖5所示。當點擊手機或電腦界面上的不同按鈕時,即時調用程序中所對應的回調函數,不同的回調函數對應著智能噴藥機器人不同的執行動作,從而實現對智能噴藥機器人的遠程操控與監控。
2.2? ?速度、 壓力和流量傳感器
噴灑農藥時,根據噴藥機器人行走速度、病蟲害種類及密度控制噴藥劑量、濃度以及藥液輸送管道中藥液的壓力和流量[8 ]。該系統工作時通過速度傳感器獲取機器人行進速度確保管道中藥液供應穩定,通過壓力傳感器和流量傳感器使整個噴藥裝置形成閉環系統,采用模糊 PID 控制算法[9 ],共同檢測管道中的壓力值和流量值,動態調整藥液噴灑劑量及噴霧大小,從而能較好地調整噴藥系統最終實現穩定噴藥作業。
2.3? ?自動變量噴藥系統及控制方法
為了最大程度地提高噴灑效果和減少農藥的使用量,通過圖像識別技術獲取農田病蟲害的小面積差異信息[10 ],采用變量配藥施藥技術按需噴藥,從而實現噴藥量的精準控制。
2.3.1? ? 基于圖像識別的農作物病蟲害? ? 識別系統不斷增加擴充目標農作物病蟲害病理庫,存儲于計算機存儲器中,噴藥機器人通過圖像識別技術,根據攝像頭傳送的影像資料,與庫文件進行對比,深度分析農作物所受病蟲害情況,提供分析結果給智能打藥控制系統,為農作物選擇農藥種類提供依據。
2.3.2? ? 基于微控制器的智能噴藥控制系統? ? 主要包括①基礎數據采集。包含作業環境數據、智能噴藥機器人運行參數、噴灑作業參數等[11 ]。②基于物聯網技術的通信系統構建。各軟件系統之間的數據通信,及人機界面與核心控制器之間的數據通信(注:遙控駕駛方案無人機界面與核心控制器之間的通信)。③控制程序的編寫。根據氣象環境數據,判別是否適合噴灑作業[12 ]。據圖像識別技術的判別結果,選擇農藥種類,打開對應通道的電磁閥,啟動噴灑泵,調整噴頭機構,進行農藥噴灑作業,并適時優化噴灑距離、噴灑速度、噴灑時間,實現設計預想的噴灑效果。④數據呈現及上位機操控功能實現。通過人機界面(注:遙控駕駛方案無人機界面),呈現智能噴藥機器人的作業環境數據、運行參數及操作人員對噴灑車的遠程操控功能的實現[12 ]。
2.3.3? ? 噴藥控制系統參數的控制與調節 ? 本設計的智能機器人噴藥系統主要由藥箱、變頻泵、藥液輸送管道、流量傳感器、壓力傳感器、速度傳感器及控制模塊等部分組成。根據病蟲害種類及密度等信息處理結果通過壓力傳感器及流量傳感器調節管道中藥液的壓力和流量,進而控制噴藥濃度[13 ]。為了提高控制精度,該系統中的控制模塊采用PLC控制器,用于接收速度傳感器、流量傳感器及壓力傳感器采集的信號,從而控制變頻泵及流量閥,最終實現送藥管道的流量動態控制。智能控制過程如圖6所示:
3? ?應用效果
3.1? ?噴藥效果
2023年6月中旬,在武威市涼州區、古浪縣大棚內進行對智能噴藥機器人進行噴藥量實驗和霧滴沉積量試驗。該試驗對同1行植株的噴藥量和人工噴霧進行比較[14 ]。噴藥機兩邊共14個防滴漏噴頭,噴嘴可噴角度為105°,用自來水代替混合藥液[15 ]。本噴藥系統為自動變量噴藥,通過在進液管和回流管上個安裝1個流量傳感器,即可測量出實際噴藥量。為了試驗的準確性,試驗時分別設計3個行駛速度對同1組植株連續測試3次,試驗距離為50 m。相比于傳統均勻噴施,變量噴施能夠有效減少農藥的使用[16 ],其原因是在無須噴藥的種植間隙,控制系統會關閉閥門,從而減少無效的噴施。而在有植株存在時,控制系統能夠根據植株的生長情況及病蟲害情況調整噴藥量的大小,對于個體較小的植株也能夠減少噴藥量,從而能夠在不降低噴施效果的前提下達到節約農藥使用的效果。
3.2? ?樣機行走效果
通過手機遠離機器人的方式測試手機遠程控制距離,測試距離由近及遠,試驗發現在手機直線距離遠離機器人50 m以上,手機控制機器人信號傳輸不穩定[17 ]。用手機控制噴藥機器人轉置最大轉向角,以2 km/h速度分別向左、向右各轉4圈,以噴藥機器人中心線的中點為轉彎半徑的參考點[2 ]。試驗結果表明,機器人樣機控制相對靈活,最小轉彎半徑為1.8 m,向左向右轉向基本一致,可實現平穩直行、轉彎等動作。
4? ?應用建議
設計的智能農藥噴灑機器人可以實現遠程遙控作業,可以減輕農戶勞動強度,改善噴藥作業環境。農戶噴灑農藥應盡可能采用智能噴藥設備進行,可以節約農藥,避免農戶長時間作業身體受到侵害。應用建議如下,一是農戶在噴藥作業時最大遙控作業不超過50 m;二是噴藥機器人的最小轉彎半徑為1.8 m;三是噴藥機器人以2 km/h在田間作業除草作業間距雙側約8 m。樣機控制靈活,噴霧效果好,在以后的田間作業中充分改進優化智能噴藥機器人多項關鍵技術,精準噴灑農藥,提高作業效率。
該智能噴藥機器人設計通過融合人工智能、無人機和傳感器等技術,實現了農藥施用的自動化和精準化,有效提高了噴藥效果和農作物產量,并減少了對環境和人類健康的潛在風險。下一步針對噴藥過程中智能噴藥機器人運行的平穩性、根據作物生長態勢精準靶向噴藥及噴藥效率做進一步優化,增加噴藥自動升降及轉向裝置、增大噴藥射程以適應更遠的噴灑距離。
參考文獻:
[1] 劉? ?勇,徐識溥,胡雯雯,等.? 基于Wi-Fi的農業環境數據遠程監控系統研究[J].? 上海農業學報,2021,37(4):140-146.
[2] 譚? ?潔,劉? ?震,唐雪剛,等.? 基于物聯網技術的智能農藥噴灑機器人的設計[J].? 物聯網技術,2022,12(5):138-140.
[3] 趙建柱,宗玉峰,王楓辰,等.? 基于機器視覺技術的大棚農作物噴藥機器人[J].? 廣東水利電力職業技術學院學報,2022,20(13):28-32.
[4] 師五喜,姜萬蕾,李寶全.? 輸入受限輪式移動機器人軌跡跟蹤控制[J].? 天津工業大學學報,2022,41(5):73-78.
[5] 汪先超.? 多AGV系統的組合導航控制與調度方法研究[D].? 大連:大連理工大學,2016.
[6] 張學峰,王仕儀,劉? ?傲,等.? 基于ROS的室內導航配送機器人設計[J].? 現代信息科技,2022,6(12):159-164.
[7] 牛文琦.? 基于深度學習的多功能自主導航農業機器人的研制[D].? 銀川:北方民族大學,2021.
[8] 張連濱,葛浙東,劉傳澤,等.? 桿狀物攀爬機器人關鍵技術綜述[J].? 計算機測量與控制,2018,26(1):1-5.
[9] 張成遠.? 自走式噴桿噴藥機噴桿平衡與變量噴藥系統設計及試驗[D].? 北京:中國農業機械化科學研究院,2022.
[10] 關桂娟.? 農用噴藥機的電控系統功能及技術優化方向[J].? 農機使用與維修,2022(8):69-71.
[11] 王萬軍,賈秋珍,曹世勤,等.? 15%三唑酮噴施次數對小麥條銹病的防治效果[J].? 寒旱農業科學,2023,2(5):464-467.
[12] 石新麗,趙墨然,李海川,等.? 基于圖像處理的玉米害蟲種類識別系統研究[J].? ?農業與技術,2021,41(12):28-31.
[13] 譚? ?靜,劉莉滋.? 施肥噴藥機械裝備在農業生產中的現狀及發展趨勢[J].? 南方農機,2023,54(15): 69-71;78.
[14] 王炯錫,胡天讓,陳立濤,等.? 基于PLC的小型智能噴藥機控制系統的研究[J].? 南方農機,2023,54(11):53-56.
[15] 周? ?通,李? ?雯,左小林.? 果園噴藥機智能管控平臺的建設研究[J].? 農業裝備與車輛工程,2023,61(1):23-27.
[16] 靳文停,葛宜元,張闖闖,等.? 履帶式溫室智能噴藥機器人的設計[J].? 農機使用與維修,2019(1):8-11.
[17] 馬志凱,趙達衛,霍? ?倩,等.? 田間智能噴藥車的設計與試驗研究[J].? 農機化研究,2021,43(10):259-263.
猜你喜歡
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年20期)2016-09-29 10:53:22
南風窗(2016年19期)2016-09-21 16:51:29
環球時報(2016-08-01)2016-08-01 07:04:45
