BDS實時精密動態定位最優觀測值彈性選取方法
2023-10-10 14:46:00葉遠斌張獻志張永峰
測繪通報 2023年9期
葉遠斌,侯 雪,張獻志,張永峰
(1. 廣東省國土資源測繪院,廣東 廣州 510500; 2. 武漢大學,湖北 武漢 430079)
隨著5G通信、自動駕駛、物聯網等技術的快速發展,萬物互聯時代即將到來。在生產生活中,無人機編隊、車輛編隊、智能網聯車等應用越來越多。精確可靠的實時相對位置關系是安全有效運行的前提,RTK技術利用差分信息獲得快速精確的實時相對位置,因此被廣泛應用于實時精密定位[1]。
雙差觀測能夠削弱或消除大部分空間不相關誤差,當兩個平臺間的基線長為幾千米時,空間相關的對流層和電離層延遲可被大幅削弱[2],雙差觀測方程中的未知參數僅包含站坐標和模糊度參數,基于單歷元觀測方程可以快速地獲得精確位置結果[3]。隨著基線長度的增加,相關性減弱,空間相關誤差的殘差也隨之增加,尤其是電離層延遲,其影響可達幾分米[4]。因此,通常采用無電離層組合消除一階電離層延遲的影響,但與此同時測量噪聲和多路徑也被放大了約3倍,且衛星觀測信息減半。根據電離層延遲處理方法的不同,RTK數據處理可以分為無電離層(ionospheric-free,IF)模型和原始觀測模型[5]。
文獻[6]采用雙頻IF模型,研究分析了GPS和BDS的中長基線RTK定位,其靜態定位精度優于5 cm。當基線長為101 km時,雙差觀測值的電離層延遲殘差達到10 cm,文獻[7]提出了基于基線長的電離層延遲的最優隨機模型。文獻[8]驗證了L1、L2和IF組合觀測值間的精度差異。然而,當前研究主要集中在基線長度固定的靜態觀測上。由于兩平臺在動態定位時電離層活動不同,會造成較大的電離層殘差[9-10]。而IF模型又會放大測量噪聲,降低定位收斂速度。當前研究中,不同基線長和電離層活動下,IF或原始觀測值模型通常依據經驗選取[11]。然而,在動態定位中基線長度不斷變化,不同地區電離層活動也存在差異,因此,在不同基線長度和電離層活動情況下選擇合適的觀測類型和處理方式是高精度動態定位的關鍵。
本文提出一種新的最優觀測值彈性選取(flexible observation selection,FOS)方法。該方法基于電離層延遲殘差和基線長度確定合適的B1或IF方法,考慮兩種不同方法的特點,以及動態定位中基線長度變化引起的電離層延遲殘差和IF測量噪聲變化。
1 最優觀測值彈性選擇FOS方法
1.1 B1雙差觀測值噪聲
動態定位測試采用司南K708板卡,對BDS-2和BDS-3系統公有信號B1和B3進行數據處理。原始信號的規格和配置可以參考K708官網,包括偽距和相位噪聲。根據誤差傳播律可知雙差BDS觀測值的精度為原始觀測值精度的2倍,見表1。
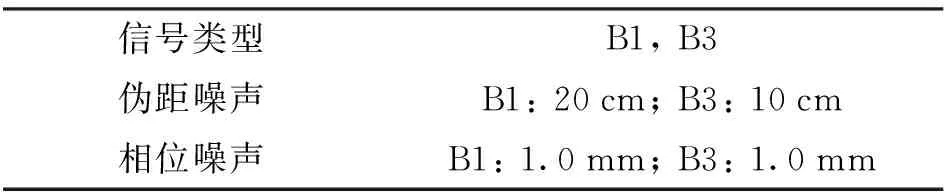
表1 K708板卡BDS雙差觀測值精度
觀測值的實測精度和標稱精度之間差異很小,不超過0.5 mm,可以忽略不計[12]。因此,實際應用中可參考接收機標稱觀測值精度,因此,B1和B3的雙差觀測值噪聲為
σB1≈σB3=1 mm
(1)
1.2 IF觀測值噪聲
根據誤差傳播律得到無電離層組合觀測噪聲[13]為
(2)
式(2)與波長相乘得到以米為單位的無電離層組合觀測值噪聲為
σIF=10.7 mm
(3)
1.3 觀測值選取策略
本文中,每個歷元動態定位數據處理使用B1或IF觀測值,根據不同基線長的電離層殘差與觀測噪聲之間的大小關系,采用最優觀測值,具體如下。
(1)使用B1觀測值時,量測誤差主要包括電離層殘差Ion、非發散的系統誤差B及觀測噪聲σ1。非發散誤差項B主要包括對流層延遲殘差以及衛星軌道誤差等[14],因此B1觀測值的定位精度εB1表示為
εB1=Ion+B+σ1
(4)
(2)使用IF觀測值時,由于消去了電離層殘差,只剩下非發散的系統誤差B及觀測噪聲σIF。LC觀測值的定位精度εIF為
εIF=B+σIF
(5)
當σ1+Ion>σIF時,IF觀測值的精度更高,反之則B1更高。因此,根據每個歷元的B1和IF觀測值之間的實際關系確定動態數據處理策略。當數據處理的觀測類型發生變化時,動態定位結果可能發生較大跳變。因此,本文將選擇條件設置為σ1+Ion>1.2·σIF,避免位置結果出現較大的跳躍。
2 試驗分析
采用靜態和動態測試驗證和分析FOS方法的性能,在武漢采集2021年10月26日至28日近3 d的靜態觀測數據,并于2021年7月14日在武漢郊區開展了約1 h的車載動態測試。BDS觀測數據使用K708 GNSS OEM 板卡采集,采樣率為1 Hz。北斗動態定位數據處理策略見表2。
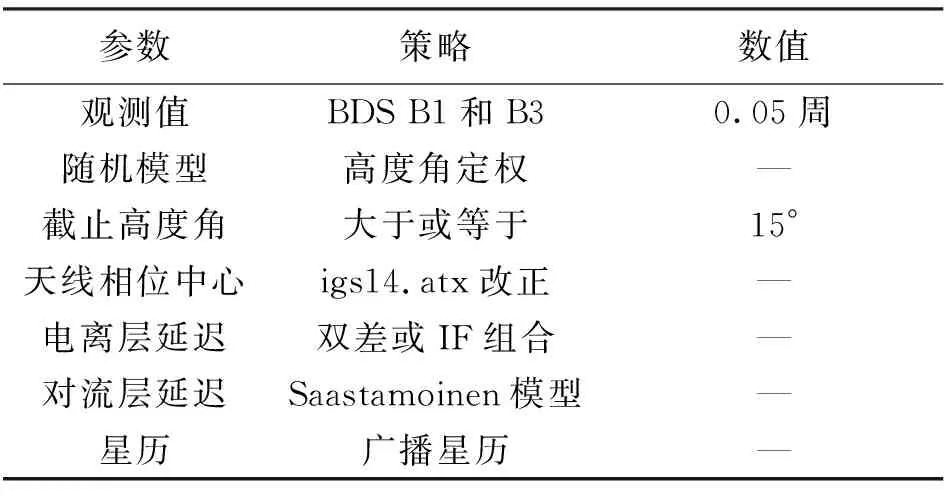
表2 動態定位數據處理策略
2.1 靜態測試結果
對靜態北斗數據進行仿動態處理,每條基線的觀測時長均大于4 h。基線長度:WDKJ-WDXH約為1 142.180 m,WDKJ-WDYH約為8 870.948 m,WDKJ-HNQC約為26 331.126 m。數據時間為2021年DOY 299—301,數據處理策略同表2。采用B1、IF、FOS 3種數據處理模式,將GAMIT/GLOBK軟件解算的“真實”坐標作為參考[15]。
以DOY 299為例,分析基線WDKJ-WHYH的結果,其誤差序列如圖1所示。可以看出,B1模式獲取的水平精度在2 cm以內,其精度較高,但高程方向誤差較大,模糊度固定率約為98.7%。采用IF模式處理后,水平誤差值與B1模式相似。然而由于噪聲被放大,部分歷元模糊度無法有效固定,其固定率僅為95.2%,導致出現更多的異常值,尤其高程方向誤差明顯大于B1模式。結果表明,FOS模式的水平和高程方向的誤差都小于2 cm,高程方向的偏差和異常值明顯減少,固定率達到了99.4%。
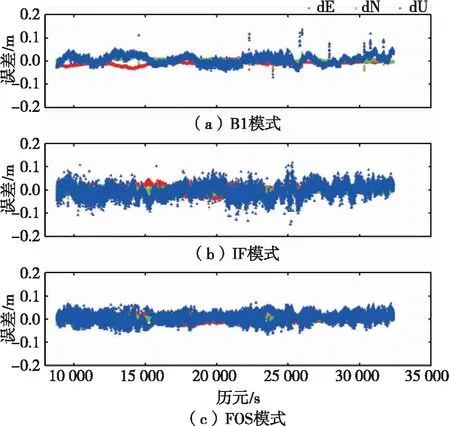
圖1 基線WDKJ-WHYH測試結果誤差序列
圖2給出基線WDKJ-HNQC的結果誤差序列。可以看出,IF和FOS模式的誤差值在3 cm以內,模糊度固定率分別為98.5%和99.0%。B1模式受電離層延遲殘差的影響,導致模糊度無法有效地固定,模糊度固定率僅為89.1%,結果序列中出現異常值。同時從圖3中可以看出,B1和FOS模式解算的基線WDKJ-WDXH結果序列非常一致。因此,FOS方法適用于各種靜態基線長度,能夠獲得最優的結果。
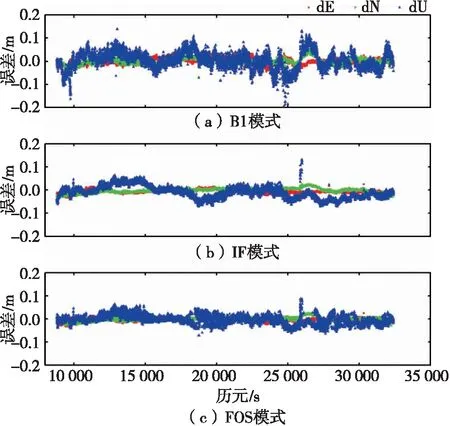
圖2 基線WDKJ-HNQC測試結果誤差序列
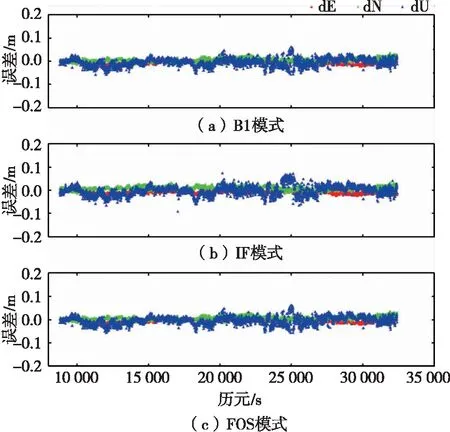
圖3 基線WDKJ-WDXH測試結果誤差序列
表3給出了靜態測試的統計結果,基線WDKJ-WDYH在FOS模式下的精度最高,在E、N、U方向上的RMS值分別為1.05、0.96和2.08 cm,在IF模式下的RMS值分別為1.12、1.13和2.41 cm,在B1模式下的精度最差。統計所有基線解算結果可以發現,FOS模式在短基線中的精度最高,相對于B1模式,在E、N、U方向分別提升9.6%、7.5%和11.4%,相對于IF模式,分別提高了約 8.6%、9.9%和12.2%。

表3 靜態測試統計結果
2.2 動態測試結果
為了驗證和評估FOS方法在動態定位中的性能,在梁子湖大道附近,跑車繞池塘行進了大約25 min后回到了起點,靜止一段時間后,跑車繼續行進直至到達終點,測試時間約70 min。基準站架設在武漢大學科技園,通過Novatel GrafNav軟件得到動態測試結果的參考值。圖4給出了測試過程中的軌跡和基線長的變化序列。可以看出,在跑車繞水池行進和靜止期間,與基站之間的基線長最長,約為16 km。從第32 900歷元基線長開始減小,在第35 300歷元,跑車與基站間的距離達到最小值1.4 km。
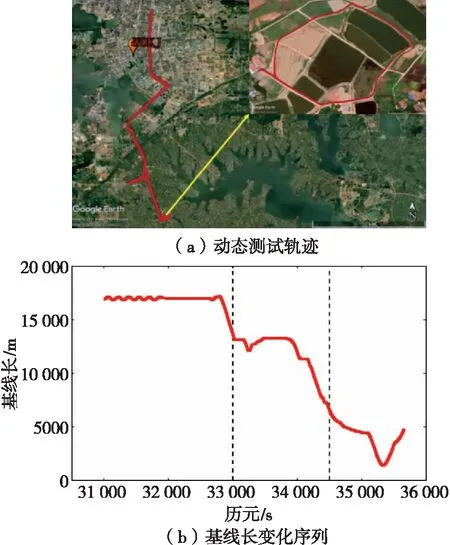
圖4 WDKJ-T004測試過程
圖5給出了3種模式在不同時段的動態定位結果與參考值在E、N、U方向上的誤差序列,3種模式的誤差整體都小于在10 cm。由圖5(a)可以看出,在跑車繞池塘行駛時,雙差觀測值無法有效消除大氣延遲,尤其是電離層延遲,因此,B1模式難以實現有效的模糊度固定,浮點值導致動態定位結果出現較多的異常值。而IF模式可以消除電離層延遲的影響,實現模糊度固定并獲得精確的動態定位結果。此外,FOS模式的定位結果與IF模式相似。
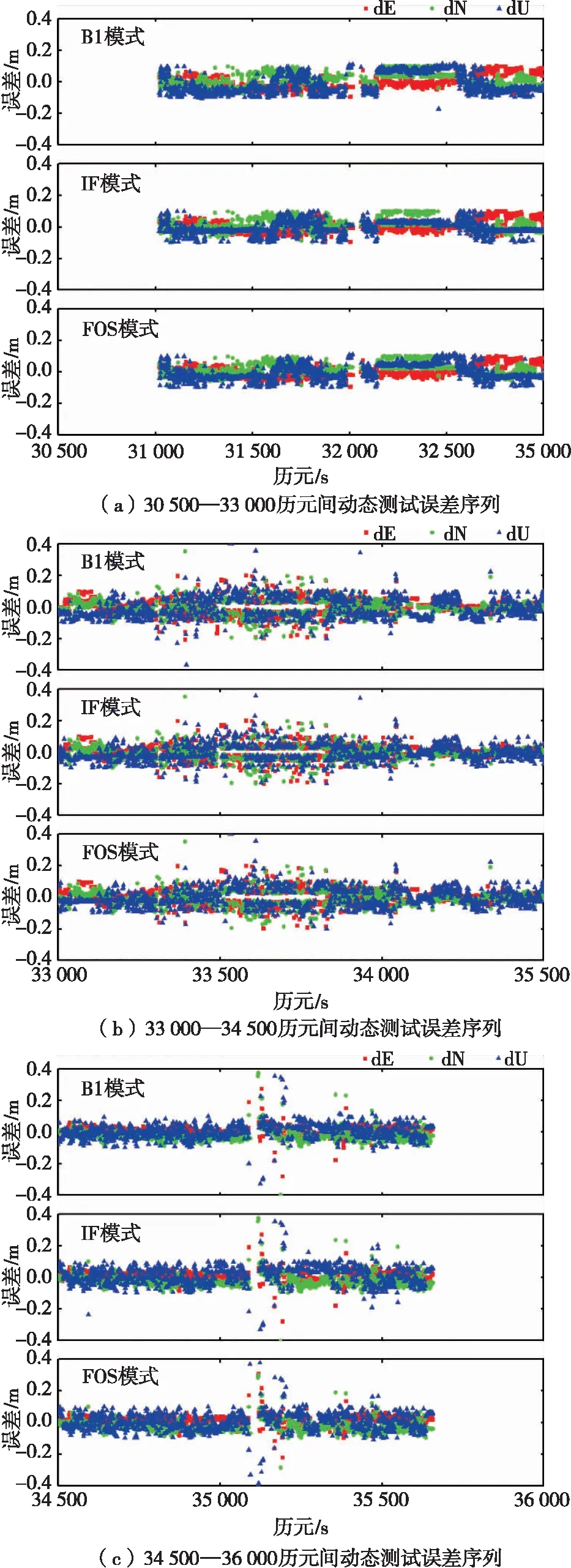
圖5 基線WDKJ-T004動態測試誤差序列
靜止一段時間后,跑車再次進行動態測試,與基準站間的距離越來越近。如圖5(b)所示,在第33 500—34 500歷元,基線長度由16 km緩慢減小到小于7 km,B1觀測值中電離層延遲殘差越來越小,模糊度固定率越來越高,定位異常點越來越少,B1和IF模式的定位結果差異越來越小,FOS模式的定位精度在此時段是最高的。在34 500歷元之后,基線長逐漸減小到1.4 km,此時B1模式可以消除大部分的大氣延遲,且噪聲更小,更有利于模糊度的固定。由圖5(c)可以看出,B1模式動態定位結果的RMS值遠優于IF模式,FOS模式與B1模式的動態定位結果相近,主要原因是FOS模式中的大多數歷元解算模式采用B1原始觀測值。
動態測試結果的RMS統計值和模糊度固定率見表4,B1模式的動態定位結果最差,RMS值分別為2.61、3.29和 3.93 cm,其模糊度固定率約為72.8%。由于整個動態測試中基線長度大于10 km的時段約占70%,因此IF模式的精度整體優于B1模式,模糊度固定率為79.5%。FOS模式的模糊度固定率為89.7%,表明模糊度固定率和定位精度達到最高,相對于B1模式分別提高了11.1%、13.7%和17.0%,相對于IF方法提高了8.3%、10.7%和13.8%。因此,FOS方法能都采用最優的觀測值,獲得最優的模糊度固定率和動態定位結果。
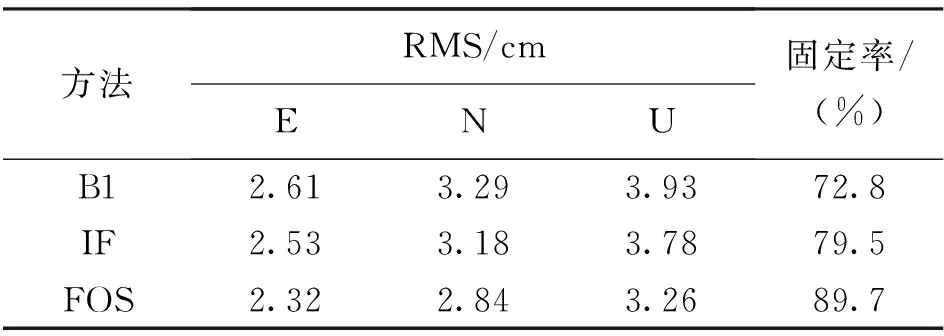
表4 動態測試統計結果
3 結 語
本文提出了FOS方法,通過比較電離層延遲殘差和測量噪聲之間的關系,確定可靠的數據處理方法;此外,還分析評估了不同長度靜態基線和中長動態基線的動態定位性能。
靜態測試結果表明,FOS方法相對于B1方法,定位精度在E、N、U方向上分別提高了約9.6%、7.5%和11.4%,相對于IF方法,分別提高了8.6%、9.9%和12.2%。跑車動態試驗結果表明,FOS方法可以實現最高的模糊度解算成功率和最佳的定位精度。相對于B1和IF方法,FOS方法的定位誤差分別改善了約11.1%、13.7%、17.0%和8.3%、10.7%、13.8%,模糊度固定率提高了16.9%和10.2%。