基于區(qū)域生長(zhǎng)和融合特征SVM的涂膠缺陷檢測(cè)
2023-10-11 09:00:10陳甦欣萬(wàn)壽祥
陳甦欣, 萬(wàn)壽祥, 劉 偉
(合肥工業(yè)大學(xué) 機(jī)械工程學(xué)院,安徽 合肥 230009)
涂膠作為生產(chǎn)制造中十分重要的環(huán)節(jié),涂膠質(zhì)量的好壞決定了制造成品的優(yōu)劣,嚴(yán)重的甚至?xí)绊懏a(chǎn)品的密封性和使用壽命[1]。目前工業(yè)生產(chǎn)中的涂膠檢測(cè)主要是依靠人工進(jìn)行檢測(cè)的,生產(chǎn)效率和精度較低[2]。近年來(lái),為了提高涂膠缺陷檢測(cè)的精度和效率,學(xué)者提出很多檢測(cè)算法[3-9],主要有基于傳統(tǒng)機(jī)器視覺(jué)的檢測(cè)、基于深度學(xué)習(xí)的檢測(cè)、基于機(jī)器學(xué)習(xí)的檢測(cè),此外還有超聲檢測(cè)法和激光掃描法等。雖然超聲波和激光檢測(cè)可以得到很好的檢測(cè)結(jié)果,但是成本較高。機(jī)器視覺(jué)作為一種非接觸的、精確靈活的檢驗(yàn)技術(shù),可以滿足自動(dòng)化涂膠檢測(cè)的要求。文獻(xiàn)[3]通過(guò)Halcon軟件提取亞像素輪廓,采用輪廓擬合算法,計(jì)算出膠條直徑,從膠條的邊緣輪廓信息實(shí)現(xiàn)對(duì)涂膠的檢測(cè);文獻(xiàn)[4]利用自適應(yīng)角點(diǎn)檢測(cè)算法和基于角點(diǎn)距離約束的立體點(diǎn)對(duì)匹配算法實(shí)現(xiàn)對(duì)涂膠識(shí)別和檢測(cè);文獻(xiàn)[5]通過(guò)比較標(biāo)準(zhǔn)涂膠圖像與實(shí)際圖像的對(duì)應(yīng)特征進(jìn)行涂膠質(zhì)量檢測(cè);文獻(xiàn)[6]利用工程圖中的涂膠軌跡數(shù)據(jù)計(jì)算膠體寬度和位置來(lái)檢測(cè)涂膠質(zhì)量;文獻(xiàn)[7]利用提取的連通區(qū)域通過(guò)邊緣形狀匹配,實(shí)現(xiàn)對(duì)電池涂膠缺陷的在線檢測(cè)。
上述傳統(tǒng)視覺(jué)檢測(cè)方法精度較低,具有一定的局限性,只適用于輪廓清晰、缺陷單一的產(chǎn)品。文獻(xiàn)[8]通過(guò)更快速的區(qū)域卷積神經(jīng)網(wǎng)絡(luò)(faster region-based convolutional neural network,Faster-RCNN)圖像缺陷檢測(cè)算法,實(shí)現(xiàn)對(duì)汽車涂膠的漏涂斷涂等缺陷檢測(cè),但深度學(xué)習(xí)方法的訓(xùn)練數(shù)據(jù)達(dá)不到要求,計(jì)算復(fù)雜,難以應(yīng)用到實(shí)際工業(yè)生產(chǎn)之中;文獻(xiàn)[9]基于模板匹配結(jié)合改進(jìn)的局部二值模式(local binary pattern,LBP)和支持向量機(jī)(support vector machine,SVM)分類器的檢測(cè)方法,利用涂膠區(qū)域信息實(shí)現(xiàn)對(duì)汽車涂膠缺陷的檢測(cè),但需二次判斷,效率較低。
為優(yōu)化以上研究的不足,受文獻(xiàn)[9]方法的啟發(fā),在此基礎(chǔ)上進(jìn)行改進(jìn),去除模板匹配初次判斷過(guò)程,融合涂膠區(qū)域的梯度信息和紋理信息,進(jìn)一步提高涂膠檢測(cè)的精度和效率。本文以電動(dòng)機(jī)裝配生產(chǎn)線上實(shí)際的底座涂膠檢測(cè)為載體,設(shè)計(jì)了一套基于區(qū)域生長(zhǎng)和融合特征SVM的涂膠缺陷檢測(cè)方法的系統(tǒng),充分利用涂膠區(qū)域的骨架特征,采用自適應(yīng)閾值區(qū)域生長(zhǎng)法分割出完整的涂膠區(qū)域,結(jié)合分割出的區(qū)域局部邊緣梯度信息與局部區(qū)域紋理信息的優(yōu)點(diǎn),通過(guò)改進(jìn)融合兩種特征進(jìn)行SVM多分類訓(xùn)練,達(dá)到對(duì)涂膠區(qū)域缺陷進(jìn)行精確檢測(cè)的目的。由于初始單個(gè)種子點(diǎn)迭代耗時(shí)較長(zhǎng),選取骨架區(qū)域像素點(diǎn)作為初始生長(zhǎng)種子。針對(duì)快速提取骨架時(shí)出現(xiàn)毛刺現(xiàn)象,通過(guò)鏈碼像素?cái)?shù)閾值機(jī)制去除毛刺,得到完整的細(xì)化骨架區(qū)域。
針對(duì)涂膠區(qū)域分割不完全現(xiàn)象,本文提出了一種基于加權(quán)灰度與自適應(yīng)閾值的生長(zhǎng)準(zhǔn)則。針對(duì)涂膠區(qū)域有斷膠、溢膠和缺膠等缺陷,本文提出一種基于改進(jìn)的梯度方向直方圖-多半徑局部二值模式(improved histogram of oriented gradient-multi radius block local binary pattern,IHOG-MBLBP)融合特征SVM多分類算法。大量實(shí)驗(yàn)結(jié)果表明,本文方法能夠精準(zhǔn)地分割出涂膠區(qū)域并檢測(cè)出缺陷,檢測(cè)精度高、效率高。
1 圖像預(yù)處理
圖像預(yù)處理過(guò)程如圖1所示。因?yàn)橄到y(tǒng)硬件本身和圖像采集環(huán)境等因素,拍攝的圖像受到較多外部噪聲的影響,所以需要對(duì)圖像濾波降噪處理,減少和消除無(wú)關(guān)噪聲對(duì)圖像的影響,進(jìn)一步提高圖像質(zhì)量。對(duì)比幾種常用濾波對(duì)圖像的影響后,本文采用雙邊濾波處理,可以達(dá)到保邊去噪的功能,處理后如圖1a所示。

圖1 預(yù)處理過(guò)程
對(duì)濾波后圖像進(jìn)行取圓心操作。首先將灰度圖像轉(zhuǎn)換為二值圖像,考慮到拍攝的圖片底座表面和背景色明亮程度差距較大,兩區(qū)域交界處采用梯度查找[10]圓形輪廓通常會(huì)生成不錯(cuò)的輪廓效果圖。而在電機(jī)底座圖片中具有較多的圓形輪廓,對(duì)通過(guò)指定半徑大小范圍,提取符合要求的圓輪廓,得到其圓心坐標(biāo),并通過(guò)circle函數(shù)將符合要求的圓輪廓畫(huà)出,結(jié)果如圖1b所示。
剔除無(wú)關(guān)區(qū)域會(huì)提高圖像處理效率,因此對(duì)圖像取掩膜。首先基于得到的圓心坐標(biāo)創(chuàng)建環(huán)形掩膜以提取涂膠附近區(qū)域,確保整個(gè)涂膠區(qū)域都在掩膜區(qū)內(nèi),掩膜后的涂膠區(qū)域如圖1c所示;然后將掩膜后的圖進(jìn)行灰度化,使用閾值分割將灰度圖像轉(zhuǎn)換為二值化圖像,結(jié)果如圖1d所示。
2 區(qū)域分割
區(qū)域生長(zhǎng)法是一種經(jīng)典的圖像分割方法,在應(yīng)用時(shí),需要對(duì)3個(gè)重點(diǎn)問(wèn)題加以解決:① 顯著的初始生長(zhǎng)種子;② 精確的生長(zhǎng)準(zhǔn)則;③ 準(zhǔn)確的生長(zhǎng)停止條件[11]。傳統(tǒng)的區(qū)域生長(zhǎng)算法通常選取單個(gè)像素點(diǎn)作為種子點(diǎn),按照指定規(guī)則進(jìn)行八鄰域生長(zhǎng),當(dāng)達(dá)到指定閾值條件時(shí)停止生長(zhǎng)。雖然傳統(tǒng)區(qū)域生長(zhǎng)原理簡(jiǎn)單,但是選取單個(gè)特征像素點(diǎn)或手動(dòng)選取種子點(diǎn)處理時(shí)間較長(zhǎng),同時(shí)很容易出現(xiàn)過(guò)分割和欠分割問(wèn)題。針對(duì)上述問(wèn)題,本文提出一種改進(jìn)的區(qū)域生長(zhǎng)分割算法。
2.1 種子點(diǎn)的選取
單個(gè)種子像素點(diǎn)在生長(zhǎng)迭代時(shí)慢慢生長(zhǎng)為一小塊區(qū)域,最后生長(zhǎng)完全,迭代耗時(shí)較長(zhǎng),實(shí)時(shí)性檢測(cè)效率差。為縮短迭代時(shí)間,本文采用圖像的骨架特征區(qū)域作為初始種子區(qū)域,骨架提取改進(jìn)前、后對(duì)比如圖2所示。

圖2 骨架提取改進(jìn)前、后對(duì)比及局部細(xì)節(jié)放大圖
2.1.1 張-孫并行細(xì)化骨架提取算法
骨架特征作為圖像的重要特征,為后續(xù)的圖像處理帶來(lái)了方便[12]。張-孫(Zhang-Suen,ZS)并行細(xì)化骨架提取算法通過(guò)對(duì)每個(gè)待檢測(cè)像素中心像素點(diǎn)的八鄰域重復(fù)執(zhí)行邏輯運(yùn)算,刪除圖像中的非骨架像素點(diǎn),不斷腐蝕細(xì)化提取骨架,具有迭代少、速度快,保證提取出的骨架線型、拐角交叉與原圖像一致的特點(diǎn)。經(jīng)快速細(xì)化提取骨架算法運(yùn)算后,需要涂膠區(qū)域骨架如圖2a所示。
從圖2a可以看出,骨架特征處于涂膠區(qū)域的中間位置,形成一個(gè)近似圓形的骨架。雖然該算法可以快速提取出骨架,但是從具體的放大細(xì)節(jié)看,受噪聲影響圖像出現(xiàn)了骨架輪廓毛刺等現(xiàn)象,且部分毛刺超過(guò)膠線寬度,嚴(yán)重影響圖像的結(jié)構(gòu)。因此需對(duì)該算法進(jìn)行改進(jìn)。
2.1.2 改進(jìn)的骨架提取算法
為消除骨架輪廓毛刺,引入鏈碼像素?cái)?shù)閾值機(jī)制。同時(shí),為避免消除骨架本身,需要根據(jù)骨架主干與分支進(jìn)一步界定毛刺,最后刪除骨架毛刺[13]。在進(jìn)行消除毛刺前,需要預(yù)先對(duì)骨架進(jìn)行像素寬度單一化。對(duì)于骨架節(jié)點(diǎn)(分叉點(diǎn)),像素點(diǎn)的八鄰域中有3個(gè)或3個(gè)以上像素為1。對(duì)于骨架端點(diǎn),在像素點(diǎn)的八鄰域中有且只有1個(gè)像素為1。本文使用八連通鏈碼,如圖3a所示。編碼時(shí)首先確定一個(gè)像素點(diǎn)作為中心像素點(diǎn),然后選定一個(gè)初始追蹤方向,并從初始方向所指的像素點(diǎn)逆時(shí)針地在其他方向查找與中心點(diǎn)緊鄰的像素點(diǎn);當(dāng)找到第1個(gè)點(diǎn)后,記下它相對(duì)于上一像素點(diǎn)的方向數(shù),并標(biāo)記原來(lái)的中心點(diǎn),再以此點(diǎn)為中心像素點(diǎn),尋找與此點(diǎn)緊鄰的非標(biāo)記像素點(diǎn),并依次記錄它們的方向數(shù),直到追蹤完成為止。單像素骨架圖像如圖3b所示,以左上角像素點(diǎn)作為初始中心像素點(diǎn)自上而下,利用八連通鏈碼進(jìn)行編碼,為777767666766。

圖3 八連通鏈碼與單像素骨架示意圖
消除毛刺的具體步驟如下:
1) 根據(jù)節(jié)點(diǎn)和端點(diǎn)的判定準(zhǔn)則,迭代判斷骨架上所有的端點(diǎn)和節(jié)點(diǎn),并記錄其坐標(biāo)。
2) 將節(jié)點(diǎn)各分支利用八連通鏈碼追蹤,記錄分支坐標(biāo)。若分支跟蹤到的結(jié)束點(diǎn)為節(jié)點(diǎn),則將此段標(biāo)記為主干,并從結(jié)束節(jié)點(diǎn)向開(kāi)始節(jié)點(diǎn)方向進(jìn)行方向編碼;若分支跟蹤到的結(jié)束點(diǎn)為端點(diǎn),則將此段標(biāo)記為分支,并從開(kāi)始節(jié)點(diǎn)向結(jié)束點(diǎn)方向進(jìn)行方向編碼,計(jì)算分支鏈碼像素?cái)?shù)N。
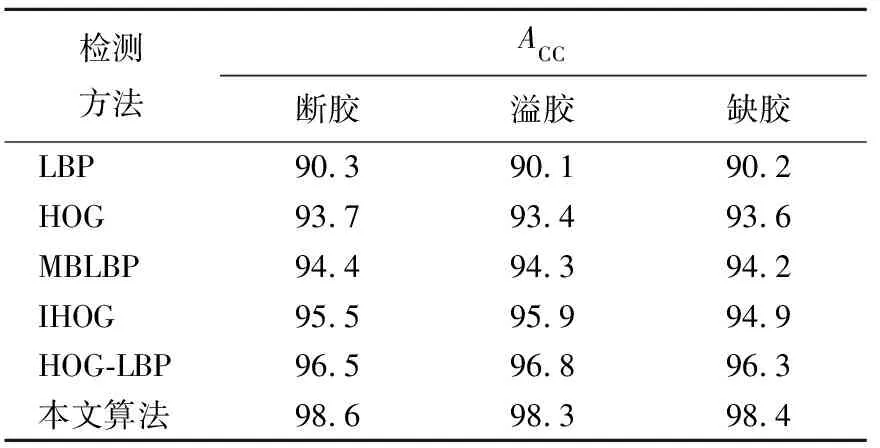
3) 將同一節(jié)點(diǎn)引出的分支鏈碼像素?cái)?shù)N與毛刺像素?cái)?shù)閾值N0進(jìn)行比較。若分支像素?cái)?shù)N 4) 若各節(jié)點(diǎn)遍歷結(jié)束,則輸出圖像。經(jīng)改進(jìn)后算法所提取的涂膠區(qū)域骨架如圖2b所示,圖像較平滑,無(wú)毛刺分叉,能夠完整、準(zhǔn)確地突出涂膠區(qū)域的特征。將骨架上的點(diǎn)載入?yún)^(qū)域生長(zhǎng)的生長(zhǎng)點(diǎn)堆棧中,將初始生長(zhǎng)區(qū)域中骨架上的點(diǎn)標(biāo)記為已生長(zhǎng)點(diǎn),骨架線外的點(diǎn)標(biāo)記為待生長(zhǎng)點(diǎn)。 2.2.1 固定閾值生長(zhǎng)準(zhǔn)則 傳統(tǒng)區(qū)域生長(zhǎng)法一般采用設(shè)定固定閾值與像素點(diǎn)鄰域內(nèi)平均灰度值作為生長(zhǎng)判定準(zhǔn)則。在生長(zhǎng)過(guò)程中,每一個(gè)像素點(diǎn)的灰度值由其四鄰域或八鄰域內(nèi)的像素點(diǎn)共同決定。基于固定閾值的生長(zhǎng)準(zhǔn)則得到的區(qū)域圖像,存在明顯的過(guò)分割、欠分割和生長(zhǎng)不完全現(xiàn)象,對(duì)后續(xù)缺陷檢測(cè)造成影響[14]。該生長(zhǎng)準(zhǔn)則魯棒性較差,需進(jìn)一步優(yōu)化改進(jìn)。 2.2.2 改進(jìn)的生長(zhǎng)準(zhǔn)則 本文提出一種基于像素點(diǎn)周圍十二鄰域的灰度加權(quán)平均值和自適應(yīng)閾值的生長(zhǎng)準(zhǔn)則來(lái)提高算法的魯棒性,十二鄰域示意圖如圖4所示。改進(jìn)像素點(diǎn)平均灰度值取法,更好地改善過(guò)分割和欠分割現(xiàn)象,取待生長(zhǎng)像素點(diǎn)(xi,yi)的十二鄰域的加權(quán)平均灰度值,表達(dá)式為: 圖4 十二鄰域示意圖 (1) 根據(jù)多次實(shí)驗(yàn)結(jié)果,規(guī)定中心像素點(diǎn)(xi,yi)的灰度值權(quán)重占2/3,八鄰域內(nèi)的各點(diǎn)(xj,yj)共占1/4,剩下鄰域(xk,yk)的各點(diǎn)共占1/12。 (2) (3) (4) 其中,Ta為反映生長(zhǎng)條件的閾值預(yù)設(shè)值。 (5) 因骨架區(qū)域像素點(diǎn)作為初始種子點(diǎn)集合被存儲(chǔ)在堆棧中,當(dāng)所有種子點(diǎn)鄰域像素不存在滿足要求的像素點(diǎn)時(shí)停止生長(zhǎng),涂膠區(qū)域圖像分割完畢。經(jīng)區(qū)域生長(zhǎng)法最后得到涂膠區(qū)域生長(zhǎng)改進(jìn)前、后結(jié)果如圖5所示。 圖5 區(qū)域生長(zhǎng)法改進(jìn)前、后結(jié)果對(duì)比及局部細(xì)節(jié)放大圖 由圖5可知,取待生長(zhǎng)點(diǎn)周圍十二鄰域內(nèi)灰度均值,同時(shí)閾值自適應(yīng)改變,使區(qū)域生長(zhǎng)自適應(yīng)能力增強(qiáng),過(guò)分割、欠分割和生長(zhǎng)不完全現(xiàn)象有所改善,魯棒性有所提高。本文區(qū)域生長(zhǎng)法流程如圖6所示。 圖6 本文算法流程 常見(jiàn)的涂膠缺陷有斷膠、溢膠和缺膠等幾種類型。在進(jìn)行缺陷檢測(cè)之前,對(duì)區(qū)域生長(zhǎng)分割得到的涂膠區(qū)域中的每一個(gè)缺陷進(jìn)行框選處理,得到由若干張缺陷圖像組成的缺陷集合E,并選擇一個(gè)合適的特征向量描述E中每個(gè)元素。而缺陷顏色和尺寸均隨機(jī)變化,因此無(wú)法采用顏色特征和形狀特征來(lái)進(jìn)行分類。紋理特征作為常用的特征,有LBP特征、梯度方向直方圖(histogram of oriented gradient,HOG)特征、Haar-like特征、灰度共生矩陣等。 HOG特征能夠清晰地描述被梯度或邊緣的方向密度分布、局部目標(biāo)的表象和形狀。LBP特征可以很好地描述灰度圖像局部臨近區(qū)域的紋理信息,具有旋轉(zhuǎn)不變性和灰度不變性的特點(diǎn),具有很好的魯棒性。然而基于單一特征的缺陷檢測(cè)方法會(huì)丟失圖像部分特征信息,使得檢測(cè)率降低,仍難滿足工程實(shí)踐要求[15]。本文對(duì)以上2種特征進(jìn)行改進(jìn),并選擇改進(jìn)后IHOG-MBLBP融合特征對(duì)分類算法進(jìn)行優(yōu)化。在分類算法的選擇上,考慮到實(shí)用性以及實(shí)際應(yīng)用效果,待測(cè)涂膠缺陷有3種類型,本文選擇組合2個(gè)二分類器來(lái)實(shí)現(xiàn)對(duì)涂膠缺陷多分類SVM的分類[16]。 在訓(xùn)練之前,須保證所有圖像樣本的尺寸一致,則應(yīng)對(duì)圖像樣本進(jìn)行縮放處理。但是,在縮放過(guò)程中,圖像樣本的寬度特征發(fā)生了改變,而寬度是區(qū)分涂膠缺陷的重要參數(shù)。基于此,本文對(duì)傳統(tǒng)的HOG特征進(jìn)行增維改進(jìn)為IHOG,即將原來(lái)的HOG與歸一化處理后的寬度進(jìn)行合并。同時(shí),為了更充分地提取LBP特征,采用多半徑塊LBP特征,即對(duì)待處理圖像采用重疊分塊技術(shù),對(duì)每一個(gè)塊分別取多半徑串行融合特征。基于IHOG與MBLBP融合特征的SVM涂膠缺陷檢測(cè)步驟如下: 1) 以1∶1的比例收集若干張涂膠正常和涂膠有缺陷的區(qū)域生長(zhǎng)分割的圖像,并將其中的90%作為訓(xùn)練圖像集,10%作為測(cè)試圖像集。 2) 利用本文改進(jìn)的區(qū)域生長(zhǎng)法對(duì)訓(xùn)練圖像集中提取涂膠區(qū)域圖像,并進(jìn)行缺陷框選處理,得到各涂膠圖像對(duì)應(yīng)的缺陷集合E。將缺陷集合E中每張缺陷圖像統(tǒng)一縮放至40×40像素大小。 3) 對(duì)缺陷集合E中的每張缺陷縮放后的圖像進(jìn)行寬度歸一化,公式為: (6) 4) 對(duì)步驟2)中得到的每張缺陷縮放后的圖像采用多種半徑(取3種半徑,分別為1、3、5)重疊分塊處理,得到改進(jìn)的描述MBLBP向量L=(u00,u01,…,u0g,u10,u11,…,u1g,u20,u21,…,u2g)。 5) 本文采用增廣特征向量來(lái)融合每張缺陷圖的IHOG和MBLBP特征,得到特征融合后的特征向量M=(αH,(1-α)L),其中,α為權(quán)重系數(shù),綜合考慮IHOG和MBLBP特征融合比例,為了更好地描述在復(fù)雜情況下缺陷的梯度和紋理特征,經(jīng)多次實(shí)驗(yàn)驗(yàn)證α=0.5時(shí)效果最佳。基于得到的融合特征向量M,對(duì)SVM分類器進(jìn)行訓(xùn)練。 6) 對(duì)測(cè)試圖像集進(jìn)行步驟2)~步驟5)所對(duì)應(yīng)的處理,得到各測(cè)試圖像的融合特征M,然后利用訓(xùn)練好的SVM分類器對(duì)其進(jìn)行分類。 為驗(yàn)證本文所設(shè)計(jì)涂膠缺陷檢測(cè)方法的有效性,開(kāi)展電機(jī)底座涂膠區(qū)域缺陷檢測(cè)實(shí)驗(yàn)。 在裝配現(xiàn)場(chǎng)采集實(shí)驗(yàn)圖像,將采集到的涂膠圖像(正常圖像1 041張、缺陷圖像987 張)利用改進(jìn)的骨架提取算法得到骨架,并以骨架為種子點(diǎn)按改進(jìn)的生長(zhǎng)規(guī)則進(jìn)行八鄰域生長(zhǎng),得到處理后完整的涂膠區(qū)域圖像。對(duì)圖像進(jìn)行缺陷框選,取900個(gè)涂膠區(qū)域有斷膠、溢膠和缺膠等缺陷目標(biāo)區(qū)域圖像樣本作為訓(xùn)練集。取100個(gè)有斷膠、溢膠和缺膠等缺陷目標(biāo)區(qū)域圖像樣本作為測(cè)試集。提取構(gòu)建的各類涂膠區(qū)域缺陷的樣本見(jiàn)表1所列。 表1 涂膠樣本庫(kù)中的樣本 單位:個(gè) 提取訓(xùn)練集和測(cè)試集的 LBP 特征、HOG 特征、MBLBP特征、IHOG 特征、HOG-LBP 融合特征以及本文提出的 IHOG-MBLBP 融合特征,分別對(duì)SVM分類器進(jìn)行訓(xùn)練和預(yù)測(cè),利用一系列的評(píng)價(jià)指標(biāo)計(jì)算得到本檢測(cè)的實(shí)驗(yàn)結(jié)果,見(jiàn)表2所列。評(píng)價(jià)指標(biāo)計(jì)算公式如下: 表2 不同特征的分類器檢測(cè)結(jié)果對(duì)比 % ACC=(TP+TN)/(TP+FP+TN+FN) (7) 其中,ACC、TP、TN、FP、FN分別代表準(zhǔn)確率、真正例、假正例、真負(fù)例、假負(fù)例。 由表2可知,本文所用 IHOG-MBLBP 融合特征的SVM分類準(zhǔn)確率最高,為98.6%,高于HOG-LBP融合特征SVM 分類的96.8%。LBP 特征的SVM分類準(zhǔn)確率最差,準(zhǔn)確度為90.1%,而IHOG、MBLBP均改進(jìn)了特征的選取,準(zhǔn)確率都有所上升。因?yàn)樵谔崛HOG特征時(shí),添加了圖像歸一化后寬度進(jìn)行增廣,在提取 MBLBP 特征時(shí),對(duì)每個(gè)塊分別取3個(gè)半徑,所以IHOG-MBLBP 特征的SVM分類可以保證準(zhǔn)確率最高。綜上所述,采用高級(jí)融合特征可以使檢測(cè)效果均達(dá)到最佳水平。 為解決生產(chǎn)線上涂膠缺陷人工檢測(cè)方式精度低、效率低的問(wèn)題,本文進(jìn)行了以下研究: 1) 針對(duì)初始種子點(diǎn)迭代耗時(shí)較長(zhǎng)、研究效率較低,本研究提出選取骨架區(qū)域像素點(diǎn)作為初始生長(zhǎng)種子。而快速提取骨架出現(xiàn)毛刺現(xiàn)象,提出添加鏈碼像素?cái)?shù)閾值機(jī)制,得到完整的細(xì)化骨架區(qū)域。 2) 針對(duì)涂膠完整區(qū)域分割不完全,本文提出了一種基于改進(jìn)的生長(zhǎng)準(zhǔn)則分割待檢測(cè)的涂膠目標(biāo)區(qū)域算法,以骨架上像素點(diǎn)作為起始種子區(qū)域,再利用鄰域加權(quán)灰度與自適應(yīng)閾值準(zhǔn)則進(jìn)行區(qū)域生長(zhǎng),得到待檢測(cè)的涂膠區(qū)域。 3) 針對(duì)涂膠區(qū)域有斷膠、溢膠和缺膠等缺陷,本文提出了一種基于IHOG-MBLBP融合特征的SVM分類算法,先對(duì)每個(gè)目標(biāo)區(qū)域IHOG 特征、MBLBP特征分別進(jìn)行提取,再融合2個(gè)特征并用SVM分類器進(jìn)行分類,從而實(shí)現(xiàn)缺陷的檢測(cè)。 實(shí)驗(yàn)結(jié)果表明,本文設(shè)計(jì)的缺陷檢測(cè)算法能夠準(zhǔn)確地提取骨架并得到完整的涂膠區(qū)域,對(duì)于涂膠缺陷具有較高的檢測(cè)精度和效率,能夠滿足工業(yè)生產(chǎn)需求。2.2 生長(zhǎng)準(zhǔn)則



2.3 生長(zhǎng)停止條件


3 缺陷檢測(cè)


4 實(shí)驗(yàn)驗(yàn)證與分析

5 結(jié) 論
猜你喜歡
小讀者(2021年2期)2021-03-29 05:03:48
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
華人時(shí)刊(2019年13期)2019-11-17 14:59:54
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
文苑(2018年22期)2018-11-19 02:54:14
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
紅領(lǐng)巾·萌芽(2016年1期)2016-09-10 07:22:44
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
 合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)2023年9期
合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)2023年9期
- 合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 《合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)》歡迎投稿
- 《合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)》專欄征稿啟事
- 基于冰川流速的喀喇昆侖地區(qū)典型冰川厚度反演與冰儲(chǔ)量估算
- 流體慣性效應(yīng)和裂隙幾何屬性對(duì)非達(dá)西系數(shù)的影響
- 用于手部康復(fù)的熱塑性聚氨酯軟體驅(qū)動(dòng)器研究
- 基于HS-SPME-GC-MS與OAV對(duì)5種臭鱖魚(yú)產(chǎn)品特征風(fēng)味的分析