風電機組雙向支撐能力分析與自適應慣量控制策略
2023-10-12 05:59:10胡正陽高丙團王文倬潘沈愷
電工技術學報 2023年19期
胡正陽 高丙團 張 磊 王文倬 潘沈愷
風電機組雙向支撐能力分析與自適應慣量控制策略
胡正陽1高丙團1張 磊2王文倬3潘沈愷1
(1. 東南大學電氣工程學院 南京 210096 2. 可再生能源并網全國重點實驗室(中國電力科學研究院有限公司) 南京 210003 3. 國家電網有限公司西北分部 西安 710048)
針對高比例新能源電力系統暫態頻率支撐需求,提出一種考慮雙向支撐能力的風電機組自適應慣量控制策略。首先,基于典型風電并網模型,分析了不同滲透率、控制參數和擾動下系統的頻率動態響應特性。其次,結合風電出力與轉速關系曲線,給出風電機組對頻率上升/下跌事件的雙向慣量支撐能力定量分析方法。再次,提出風電機組自適應慣量控制策略,給出各參數的設計方法并基于狀態空間方程分析了控制系統的小擾動穩定性。最后,基于RT-LAB搭建了實時仿真算例驗證所提方法的可行性和有效性。仿真結果表明,所提控制策略能夠保證風電機組根據自身能力和系統需求提供有效的慣量支撐,與已有典型控制策略相比,改善了低風速與高風速場景下的頻率響應特性。
風電機組 慣量支撐 頻率特性 自適應控制 小信號分析
0 引言
“十四五”是我國實現碳達峰的關鍵期和推進碳中和的起步期。近年來,風力發電作為清潔能源發電技術得到了廣泛重視與發展[1-3]。風電的大規模并網以及傳統火電機組的占比降低,導致系統等效慣量降低、一次調頻能力削弱等問題[4-6]。同步機組中調速器、高壓缸等其他機械部件的響應延時造成一次調頻響應速度較慢,若系統的等效慣量較低,系統頻率在擾動初始時刻會出現較大的變化率,在一次調頻響應結束前可能發生較大偏移。慣量響應是暫態頻率快速支撐的控制手段之一,在國家最新發布的風電場并網技術規定中也要求風電場具備慣量響應能力[7]。
目前通常采用虛擬慣量控制使風電機組具備慣量支撐能力[8-9],但固定系數的慣量控制參數整定困難且在不同擾動、電網不同工況下無法作出有效調整。若慣量系數較小,則風電機組無法提供有效的慣量支撐;若慣量系數較大,則風電機組所存儲的有限動能在系統發生擾動后釋放過快,導致風電機組轉子轉速過度跌落的問題[10]。為了克服傳統策略固定增益系數的問題,有學者提出了變系數慣量控制策略,基于各風電機組狀態(轉速/風速)[11-13]或基于系統狀態(頻率/頻率變化率)[5,14-19]來調整風電場的慣量響應控制參數。
基于風電機組狀態的變系數慣量控制策略研究能夠根據風電機組的頻率支撐能力調節控制參數。文獻[11]基于當前風機運行狀態,使用正比于風電機組可釋放動能的慣性增益,使風機在保證穩定運行的前提下可以在頻率事件發生初期提供較大慣量支撐功率。文獻[12]根據風速不同對虛擬慣量系數進行整定,在額定風速以下時慣量系數隨風速升高而增大。文獻[13]將慣量系數設計為隨頻率事件發生時間的推移而減小的拋物線函數,在頻率事件發生的初始階段慣性增益最大。但是,此類研究僅考慮了機組自身的支撐能力,而未深入考慮電力系統調頻需求。
頻率是風電場能獲得的為數不多的電力系統狀態量,而頻率變化率能有效反映頻率事件的嚴重程度以及當前系統的慣性強弱,在設計自適應慣量控制系數時應考慮系統的支撐需求。文獻[14]較早地提出基于分段控制的風電有功功率-頻率控制,通過頻率分段使風電機組運行在不同的有功控制區間,改善了系統頻率特性。文獻[15]設計了隨頻率偏差值和頻率偏差變化率變化的自適應慣量、一次調頻系數,但其利用超級電容為系統提供調頻功率支撐,對現有風電機組的改造要求較高。文獻[16]將一次調頻與慣量支撐功能組合,下垂系數設為隨頻率變化率升高而增大的參數,使得風電機組在擾動開始時提供較大功率支撐,在頻率跌落速度變緩后提供較小功率支撐。在此基礎上,文獻[10]考慮了風機工作狀態,將下垂系數設為同時隨頻率變化率和風機轉速變化的參數,有效地提高了頻率跌落最低值并改善風機轉速過度跌落的問題,但其缺乏參數設計的理論支撐,且該文獻中風機的穩態工作點為最大功率點跟蹤(Maximum Power Point Tracking, MPPT),提供功率支撐會使風機運行在MPPT點左側,從而危害系統的頻率小擾動穩定性[20]。文獻[19]設計了根據頻率偏差自適應改變慣量系數的虛擬同步機控制策略,文獻[5,17-18]利用模糊控制理論使慣量系數能同時根據頻率偏差量和頻率變化率而自適應變化。但虛擬慣量控制的目的是模擬同步發電機的慣性響應來抑制系統頻率的快速變化,頻率偏差應是一次調頻控制關注的問題[10]。若頻率偏差量大而慣量系數隨之增大,系統受到小擾動時風電會提供強慣量支撐,從而導致轉子轉速過度跌落的問題。此外,模糊控制規則是憑經驗設計的,論域的選擇也缺乏理論支撐。
當前已有較多針對風電機組慣量響應的相關研究,但仍存在一些不足之處。首先,已有策略對于綜合考慮風電機組自身支撐能力和電力系統慣量支撐需求的研究不夠深入。其次,已有文獻在評估風電機組轉子存儲的動能時,多以當前轉速與轉速下限之差作為基準,這使風電機組轉速跌落至MPPT點左側,危害了風電系統的小擾動穩定。再次,目前的研究多集中于解決頻率下跌事件的慣量支撐,認為風電在系統有功功率過剩導致頻率上升時具備足夠吸收能量減載的能力,但實際上在低風速時,風電減載能力有限,應對頻率上升事件的能力有限[21];高風速時風電機組到達額定轉速,不具備繼續提高轉速存儲動能從而降低輸出功率的能力。雖然變槳法可以減載,但槳距角響應時間尺度過長,風電機組的變槳速率最大約為5°/s[22],不符合慣量支撐的需求。
因此,本文針對風電并網系統,提出了一種考慮雙向支撐能力的風電機組自適應慣量控制策略,以期對并網風電機組的慣量支撐技術提供參考。首先,分析了電網的慣量支撐需求,并給出了風電機組雙向慣量支撐能力的定量分析方法;進一步地,設計了風電機組自適應慣量控制器結構及參數,并基于小信號法分析了控制器的穩定性;最后,基于RT-LAB平臺的仿真結果驗證了本文理論分析的正確性,以及所提自適應慣量控制策略與傳統控制策略相比在低風速與高風速場景下具有更佳的綜合性能。
1 風電并網模型及慣性需求分析
目前并網風電機組以雙饋風電機組和永磁直驅風電機組為主,由于風電機組的外特性相似,本文的慣量支撐能力分析思路及方法對兩種機組均適用。永磁直驅風電機組依靠機組結構、故障穿越等方面的優勢,逐漸成為主流機型,因此本文以永磁直驅風電機組為例進行分析。
1.1 風電機組建模及運行方式分析
全功率永磁直驅風力發電機組的機械功率可表示為[23-24]
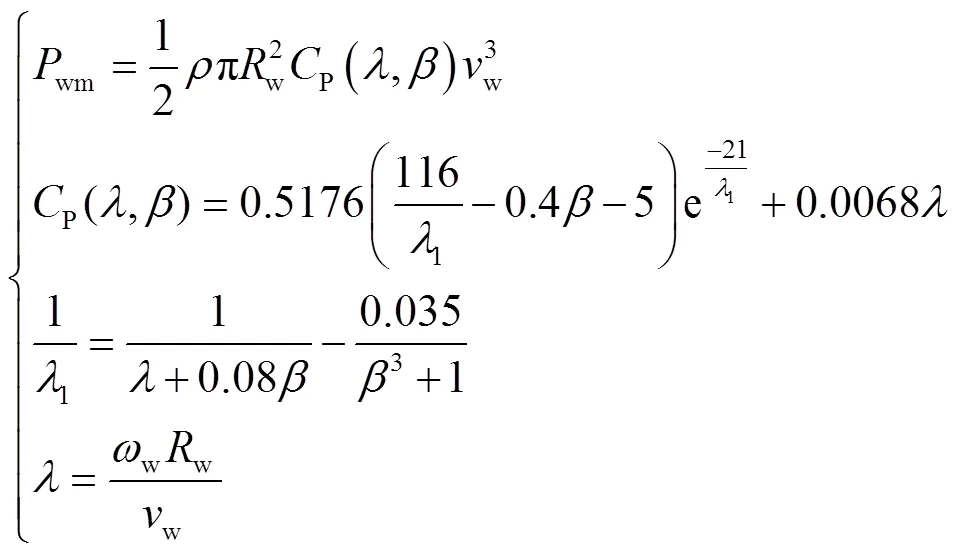
式中,wm為風電機組機械功率;為空氣密度;w、P、w、w分別為風力機的葉片半徑、風能利用系數、葉尖速比、槳距角、轉速和入口風速。
在減載運行的情況下,風電機組的功率為
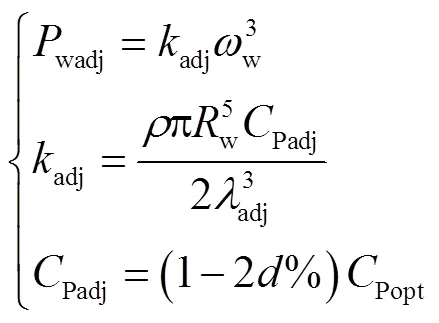
式中,wdel為風電機組減載后的給定功率;opt為風電機組的最大功率;%為風電機組減載率。由式(1)可得,當w小于最大轉速時,最大功率跟蹤曲線方程為

式中,opt為風電機組最大功率跟蹤系數;Popt為最佳風能利用系數。將式(3)代入式(2),則減載運行曲線方程為

式中,del為減載功率跟蹤系數;Pdel為減載風能利用系數。
1.2 電網慣性響應需求分析
為了分析風電并網的頻率響應特性,將電力系統等效為一臺同步發電機,風電場為單機等值模型。結合文獻[18],風電并網系統的標幺化小信號模型如圖1所示。需要注意的是,雖然本文主要研究風電的慣性響應,但等效電力系統中仍需考慮同步發電機的一次調頻控制,否則系統的頻率響應特性會發生變化,無法保證理論分析及算例的真實性。

圖1 風電并網系統小信號分析框圖
圖1中,等效電力系統的頻率響應小信號模型如式(5)~式(11)所示。




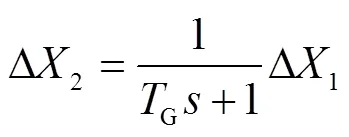

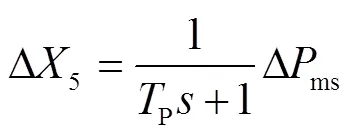
式中,為系統角頻率;s為同步發電機慣性時間常數;s為同步發電機阻尼系數;ms為同步發電機機械功率;L為負荷電磁功率;%為風電滲透率,是風電裝機容量與系統總容量之比;we為風電輸出有功功率;P為火電機組一次調頻系數;1~5分別為同步發電機調頻模型的中間狀態變量;P和I分別為PI環節的比例系數和積分時間常數;G為油動機時間常數;CH和RH分別為高壓缸和中壓缸容積時間常數;P為測功時間常數;為高壓缸功率百分比。
由于風電系統與等效電力系統分別以風機容量和同步機容量作為各自標幺化的基準,因此整個并網系統的分析中需要利用風電滲透率%來進行標幺值換算。在小信號模型式(5)中,通過%/(1-%)將以自身容量為基準的風電有功功率輸出轉換為以同步機容量為基準的標幺值形式,保證了以同步機搖擺方程為依據的頻率計算的準確性。
由式(5)可知,系統受到負荷擾動的最初時刻,由于同步發電機機械功率、轉速與風電輸出功率尚未變化,同步發電機轉速變化率與擾動大小成正比,即系統頻率變化率與擾動大小成正比。
當風電參與慣性響應與一次調頻時,其功率平衡關系式為

當風電機組減載運行時,對式(4)進行小信號分析可得

式中,下標帶0的變量為小信號分析的穩態值。由于風電系統的電磁暫態過程遠快于其機電暫態過程,因此可忽略機組和變流器的電磁調節過程,將其等效為一個慣性環節[25-26],且慣性時間常數A較小,一般為0.2 s[27]。風電系統的電磁暫態調節過程為

風電機組的轉子運動方程為

式中,w為風電機組慣性時間常數;wm為風電機組的機械力矩;we為風電機組的電磁力矩;w為風電機組的軸系阻尼系數。
對式(16)進行線性化處理得

在不同風電滲透率及慣量控制系數條件下,頻率變化率均可以有效地反映系統所受擾動強弱,風電機組的虛擬慣量系數需要根據系統頻率變化率的大小進行自適應調節[5],從而具備符合電網需求的慣量支撐控制技術。
2 風電機組雙向慣量支撐能力分析
當前研究中,為了保證風電場的總發電量,通常讓風電機組運行在MPPT模式,在頻率事件發生后控制短暫地偏離最佳運行點,并在一定時間后退出調頻返回穩態工作點。然而,由于MPPT控制下的風電場有功出力由當前風速決定,具有明顯的隨機性與間歇性特征。電力系統頻率控制的本質目標是維持電力電量的供需平衡[28],而風電有功功率波動妨礙系統達到該控制目標,從而對頻率穩定性造成影響。目前,通過減載跟蹤調度指令的方式來滿足系統的調度需求是一條可行的技術路線[29-31]。在國標GB/T 19963.1—2021《風電場接入電力系統技術規定第1部分:陸上風電》中規定的限值模式與差值模式均要求風電場采用減載控制。同時,若風電機組從最大功率點繼續減小轉速來提供有功支撐,在退出調頻后會造成系統頻率二次跌落[32],且風機在風速變化時存在失穩的風險[33]。因此,本文設定風電機組在穩態時通過減載跟蹤調度指令,并依據風機在超速后所存儲的動能大小來分析風電機組自身的慣量支撐能力。
2.1 頻率下跌的慣量支撐
系統頻率下跌時,需要電源側增加有功功率來提供慣量支撐。風電機組運行在超速減載狀態,其可用來支撐慣性的能量為超速運行所存儲的多余動能。風電機組的轉速變化范圍一般為0.7(pu)~1.2(pu)[34-35],因此本文取風電機組安全運行轉速下限為0.7(pu),上限為1.2(pu)。當風速較大時,風電機組轉速到達上限,則無法繼續使用超速法進行減載,因此超速法適用的范圍為中低風速區。在減載率的取值確定的情況下,可以將風速從小到大分為三個區間:區間d1[dmin,d1)、區間d2[d1,d2)和區間d3[d2,wn]。其中,dmin為風電機組減載轉速達到轉速下限對應的風速,減載轉速即為風電機組減載%運行時對應的轉速;d1為風電機組最佳轉速達到轉速下限對應的風速,最佳轉速即為風電機組在MPPT點對應的轉速;d2為風電機組減載轉速達到轉速上限對應的風速;wn為額定風速。風速若在區間d1、d2內,風電機組僅使用超速控制進行減速;風速若在區間d3內,風電機組使用超速和變槳控制減載。若減載率一定,則根據式(4)可以得到Pdel,代入式(1)可以得到減載葉尖速比del,根據式(18)可以求得各風速對應值。

式中,wmin為風電機組轉速下限,取0.7(pu);wmax為風電機組轉速上限,取1.2(pu);opt為風電機組最佳葉尖速比。
為了更直觀地展示不同風速下風電機組出力和風機轉速的關系,給出了圖2所示的關系曲線。圖2中各風速值與式(18)和式(21)所得風速區間對應,橙色虛線對應頻率下降、藍色點畫線對應頻率上升。另三條曲線分別為風電機組不同風速下MPPT點、減載%運行點、減載2%運行點的連線。若風速恰好為dmin,則風電機組運行在A點,減載運行轉速del剛好達到轉速下限,此時所能提供的動能仍為0。若風速在區間d1[dmin,d1)中,風機運行點由A點向B點移動,其減載轉速高于轉速下限,但最佳轉速仍低于轉速下限,此時風電機組的轉速調節范圍為轉速下限wmin至減載轉速del。當風速達到d1,風電機組運行于B點,其最佳轉速等于轉速下限,此時為了避免頻率的二次跌落,風電機組轉速最低調至最佳轉速。風速到達區間d2[d1,d2)后,風機運行點由B點向C點移動,最佳轉速高于轉速下限,此時風電機組的調速范圍為最佳轉速opt至減載轉速del。若風速為d2,風電機組運行于C點,減載轉速達到了轉速上限,風速繼續增大至區間d3[d2,wn]中,為保證運行安全轉速無法增加,僅利用超速法無法滿足減載要求,需要使用變槳法配合超速法減載。由于風機調整槳距角會造成機械磨損,且速度較慢一般為5°/s,因此變槳法減載不能提供慣量支撐所需能量,此時機組轉速調節范圍為最佳轉速opt至轉速上限wmax。當風速到達風電機組額定風速時,風機運行在最大轉速處恰好為MPPT模式,無法使用超速法繼續減載。

圖2 不同風速下風電機組出力和風機轉速關系曲線
根據以上分析,當風速在三個區間范圍內時,風電機組可釋放的動能分別為

式中,k1為風電機組可釋放的動能;為風電機組轉子的轉動慣量。根據式(19)可知,在各區間內,機組可釋放的動能均為風速的二次函數。
2.2 頻率上升的慣量支撐
當系統頻率上升時,需要源側減少有功功率來提供慣量支撐。風電機組運行在超速減載狀態,其可存儲的慣量支撐能量為當前最大轉速到當前轉速的動能差。根據中華人民共和國電力行業標準DL/T1870—2018《電力系統網源協調技術規范》的有關規定,新能源參與調頻時有功出力降至額定出力的10%即可不再向下調節。此外,新能源向上與向下調節出力幅度一般相同,因此本文中設定風電機組在減載%條件下可繼續向下調節%的當前最大功率,且最低出力為10%額定功率。此時,可知最大葉尖速比up與減載2%的葉尖速比相同。定義風電機組減載%運行對應的轉速為減載轉速,減載2%運行對應的轉速和葉尖速比為最大調節轉速adj和最大調節葉尖速比adj。
由式(4)可同理得減載2%運行曲線方程為
將風速從小到大分成三個區間,區間u1[umin,u1)、區間u2[u1,u2)和區間u3[u2,d2]。其中,umin是風電機組減載%運行達到10%額定功率n對應的風速;u1是風電機組減載2%運行達到10%額定功率對應的風速;u2是風電機組最大調節轉速達到額定轉速時對應的風速。根據式(21)可以求得各區間的邊界風速值。
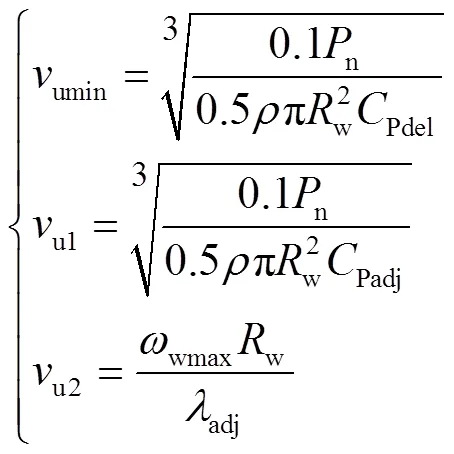
如圖2所示,若風速恰好為umin,則風電機組運行在D點,減載運行功率為10%n,由于吸收動能需要減少出力,而規定的風電機組參與調頻最低出力為10%n,因此此時所能吸收的動能仍為0。若風速在區間u1[umin,u1)中,風機運行點由D點向E點移動,風機的減載運行功率超過10%n,但減載2%的功率未超過10%n,此時風電機組轉速調節范圍有限,為減載轉速del至10%n對應的轉速up。當風速達到u1,風電機組運行在E點,減載2%后剛好為10%n,為了避免過度調節導致的脫機風險,同時保持機組出力向上、向下調節范圍的一致性,轉速最高調節至最大調節轉速adj。風速達到區間u2[u1,u2)后,風機運行點由E點向F點移動,減載2%出力仍高于出力下限10%n,此時風電機組的調速范圍為減載轉速del至最大調節轉速adj。若風速為u2,風電機組運行在F點,則最大調節轉速adj達到轉速上限,風速繼續增大至區間u3[u2,d2]中,由于安全轉速限制,機組轉速的調節范圍變為減載轉速del至轉速上限wmax。當風速達到d2后,風電機組運行于C點,減載轉速也達到轉速上限,無法繼續增加轉速存儲動能,也不再具備頻率上升的慣量支撐能力。
因此,當風速在三個區間范圍內時,風電機組可吸收的動能分別為

式中,k2為風電機組可吸收的動能;up、up分別為風電機組減載至10%額定功率時對應的轉速和葉尖速比;adj的計算方法同del。up隨風速的改變而變化,具體數值可以通過查表法獲得。根據式(22)可知,在各區間內,機組可吸收的動能均為風速的二次函數。
基于以上對于不同風速區間的風電機組動能裕度定量計算,綜合給出風電機組為應對頻率事件進行雙向慣量支撐所能釋放/吸收的動能與風速的關系,如圖3所示。
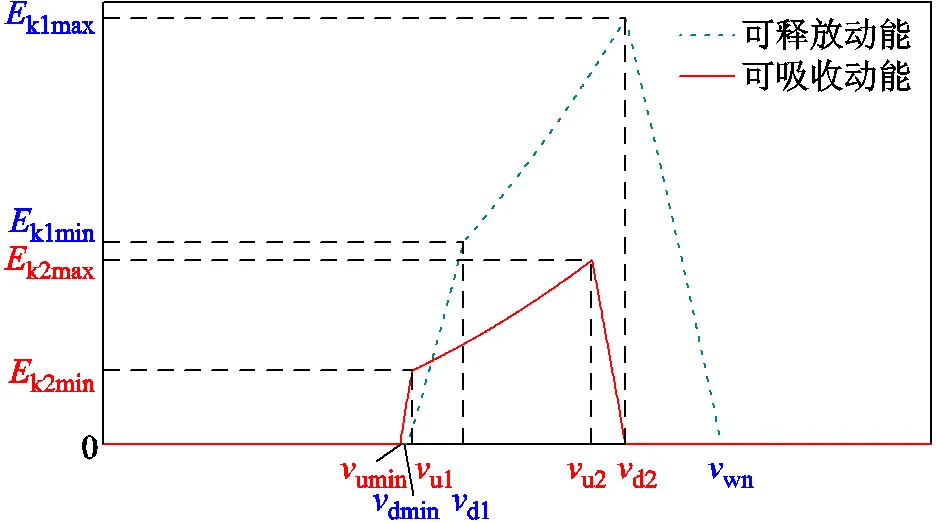
圖3 不同風速下風電機組可釋放/吸收的動能曲線
從圖3中(藍色)點線可以看出,風電機組可釋放的動能在風速低于dmin時為0,因為此時機組在減載運行狀態下轉速未達到0.7(pu)。風速在dmin與d2之間時,機組可釋放的動能隨風速增大而增大,而風速超過d2后,機組可釋放動能隨風速增加而減小,直至達到額定風速wn,為避免系統頻率二次跌落,頻率下跌時機組不再提供慣量支撐。
從圖3中(紅色)實線可以看出,風電機組可吸收的動能在風速低于umin時為0,因為此時機組在減載運行狀態下出力未達到最低安全出力0.1(pu),無法繼續減載存儲動能而參與頻率上升的慣性響應。風速在umin與u2之間時,風機可吸收的動能隨風速增大而增大,而風速超過u2后,機組可吸收的動能隨風速增加而減小,直至達到d2,此時機組減載轉速達到最大轉速,無法繼續吸收動能,從而不具備頻率上升的慣量支撐能力。
對比圖3中兩條曲線可知,在大多數情況下風電機組動能的釋放能力比吸收能力更強,意味著風電機組對頻率下降事件的慣量支撐能力比應對頻率上升事件更強,這建立在本文規定風電機組向上與向下調節的功率裕度相同的條件下。由圖2中風電出力與轉速的關系可知,風電機組在遠離MPPT后曲線斜率隨w增大而增大,說明相同功率變化量對應的轉速調節幅度逐漸減小,而轉速調節幅度變小又導致了能存儲的動能減小。
值得注意的是,圖3所得結論基于設定的減載率及調頻出力區間。若實際參數與本文所設不同,只需修改參數進行計算,分析方法無需修改。
3 風電自適應慣量控制策略
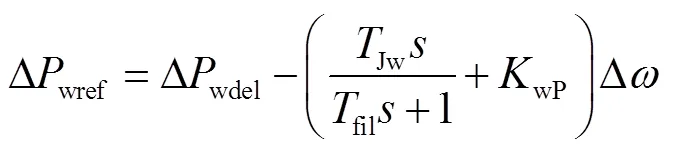
基于系統的慣量支撐需求分析和風電的慣量支撐能力評估,本文提出了一種風電自適應慣量控制策略,自適應控制器根據d/d、w和w對虛擬慣量系數進行自適應調整,風電自適應慣量控制框圖如圖4所示。
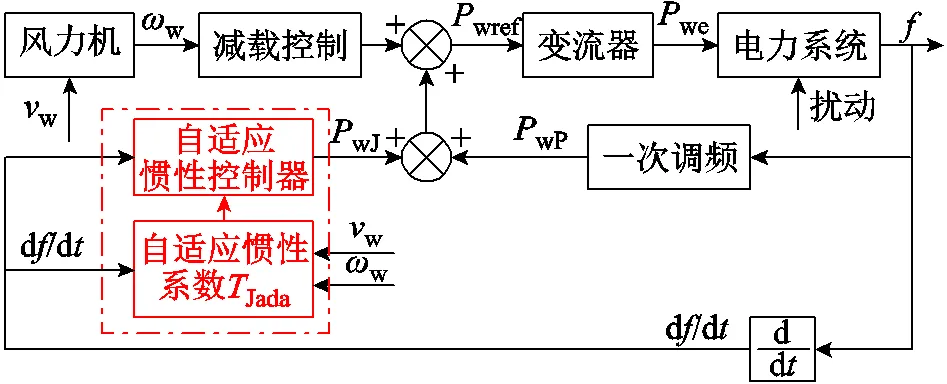
圖4 風電自適應慣量控制框圖
虛擬慣量控制設計的初衷就是為了模擬同步發電機的慣量響應,也就是在負荷功率變化時,能產生一個與頻率變化率d/d負相關的補償功率。利用自適應慣量系數Jada來模擬同步發電機運動方程中的慣性時間常數J,設置圖4中自適應慣量控制數學模型為
頻率是風電場能檢測到的系統變量,且頻率變化率能有效反映系統當前擾動的強弱,因此需要以頻率變化率d/d作為輸入對慣量系數進行自適應調整。設計了一個具有上下限、左右對稱和對d/d的靈敏度可調的自適應慣量系數Jada為
式中,為自適應因子;Jmax和Jmin分別為慣量系數的最大值和最小值。
3.1 自適應慣量控制參數設計
3.1.1 自適應因子
根據所設計的自適應慣量系數表達式(24),可得Jada與d/d的關系曲線如圖5所示。

圖5 TJada與df/dt的關系曲線
圖5中,從50每次增加50直至300,共6條曲線。由圖5可以看出,隨著d/d絕對值的增加,Jada從Jmin開始逐漸增大,最后無限趨近于Jmax。越大,Jada在初始階段的變化越明顯并更快地趨于平穩。在d/d相同的情況下,越大,Jada越大。同時,考慮到Jada的頻繁瞬變可能會造成風電機組疲勞載荷的積累,應對Jada變化率進行約束。
自適應因子的表達式為
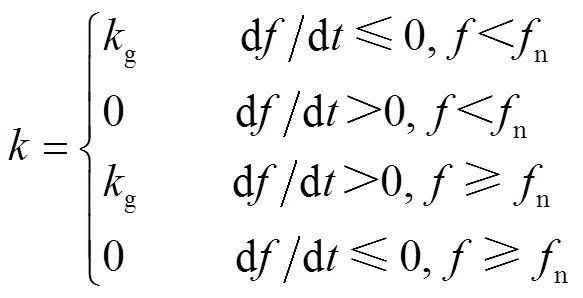
式中,g為常數。根據2015年錦蘇直流故障的錄波數據,故障后華東電網的頻率變化率約為-0.08 Hz/s,頻率跌落深度為0.41 Hz[36]。考慮到電力系統一般允許的頻率波動范圍為±0.2 Hz(約為錦蘇直流故障頻率跌落深度的一半),本文認為頻率變化率超過±0.04 Hz/s時系統所受擾動即為劇烈擾動,風電機組需要提供強慣量支撐。基于圖5對自適應因子與自適應慣量系數Jada的分析,參數g的取值應使頻率變化率達到0.04 Hz/s時的Jada趨近于Jmax,則取50~100較為合適:高于100則Jada對d/d過于敏感;低于50則Jada在頻率變化率達到0.04 Hz/s時仍無法提供較大支撐。
設計自適應因子的目的是確保當頻率遠離額定頻率n時,新能源發電能提供系統需要的慣量支撐;當頻率向額定頻率方向變化時,慣量支撐對系統頻率的恢復起反作用,此時新能源發電不提供慣量支撐,促進了頻率的快速恢復。
3.1.2 慣量系數最大值Jmax與最小值Jmin
與一次調頻和二次調頻相比,慣量支撐的時間尺度最短,它一般針對波動頻率較高、幅值較低的負荷。根據前文分析,頻率變化率超過0.04 Hz/s時需要風電機組向系統提供其能力范圍內最大的慣量支撐。電力系統頻率跌落至最低點時間通常為5~10 s,本文要求風電機組在面對劇烈擾動時能以最大自適應慣量系數Jmax進行5 s的支撐。可以通過風電機組當前的轉速和所需要支撐的功率來計算慣量系數的最大值Jmax。
首先,當自適應慣量系數取Jmax時,根據式(23)可以得到風電機組的慣量支撐功率。此時,可求出風電機組轉子上的不平衡力矩為

根據轉子的合力矩和牛頓第二定律,可以求出風電機組轉子的加速度為

借助Newton-Raphson迭代法逐次逼近的思想,可以通過逐次逼近的方法來計算風電機組轉子到達調節極限范圍所用的時間,即
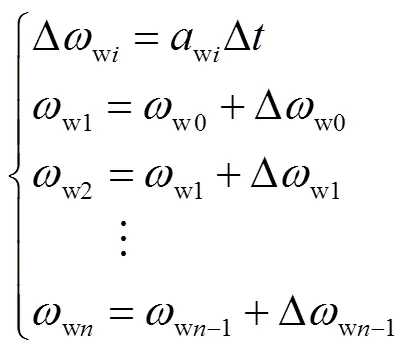
經過次迭代后,機組轉速wn達到了調節邊界,那么此時慣量支撐的最大時間即為Δ。設置一個較小的Jmax的初始值,令Δ=5 s,若wn未達到前文對風電機組雙向慣量支撐能力分析中的調節邊界,則增加Jmax后再進行一次迭代計算,如此循環,直至wn剛好達到支撐邊界,認為此時風電機組在遭遇頻率擾動后5 s通過調節轉速釋放/吸收動能剛好達到能力允許的極限,輸出當前的Jmax作為本次的計算結果。
在調頻過程中,由于需要改變轉速來吸收/釋放動能,風電機組工作點會不斷偏離減載%的預設點,導致風電慣量支撐能力改變。由于實時進行迭代計算的計算量較大,會降低控制器的工程適用性。因此,僅計算額定頻率工況下的慣量系數最大值,并通過當前風電吸收/釋放動能能力與式(19)和式(22)中對應風速區間內減載預設點的動能吸收/釋放能力之比對其進行修正,修正式為

式中,Jmax0為迭代計算得到的慣量系數最大值;k3為當前風電可吸收/釋放的動能,即

此時,所設計的Jmax保證了風電機組在遭受劇烈擾動時可以提供自身能力范圍內并滿足支撐時間要求的最大慣量支撐。
結合式(24)和式(25)可以看出,當頻率向遠離額定頻率方向變化時,自適應慣量系數主要取決于Jmax,而當頻率向靠近額定頻率方向變化時,自適應慣量系數等于慣量系數最小值Jmin。為了保證所提策略滿足國家標準[7]的要求,Jmin取為Jt。其中J取12 s,t為風電場有功功率。
3.2 控制器穩定性分析
將風電并網系統寫為狀態方程的形式,即

式中,Δ=[Δ1Δ2Δ3Δ4Δ5ΔΔwJΔwe]T為狀態向量;Δ=[ΔLΔw]T為擾動量。系統矩陣和如附錄式(A1)和式(A2)所示。
此時,線性系統的特征值可根據式(32)得出。
根據式(32)可畫出系統隨風電慣量系數變化的根軌跡(根軌跡繪制參數見第4節仿真分析),如圖6所示,風電虛擬慣量系數從0增至500。
根據圖6可以看出,主導極點均位于虛軸左側,證明了系統的穩定性。系統主導極點隨風電慣量系數增加而逐漸靠近虛軸,阻尼比減小。且隨著風電慣量系數的增大,系統的根軌跡變化幅度逐漸減小。
4 算例分析
為了驗證本文理論分析的正確性和所提自適應慣量控制策略的有效性,基于RT-LAB OP5700實時仿真平臺搭建了風電場在母線9處并入3機9節點的標準系統[37],RT-LAB實時仿真平臺如圖7所示。
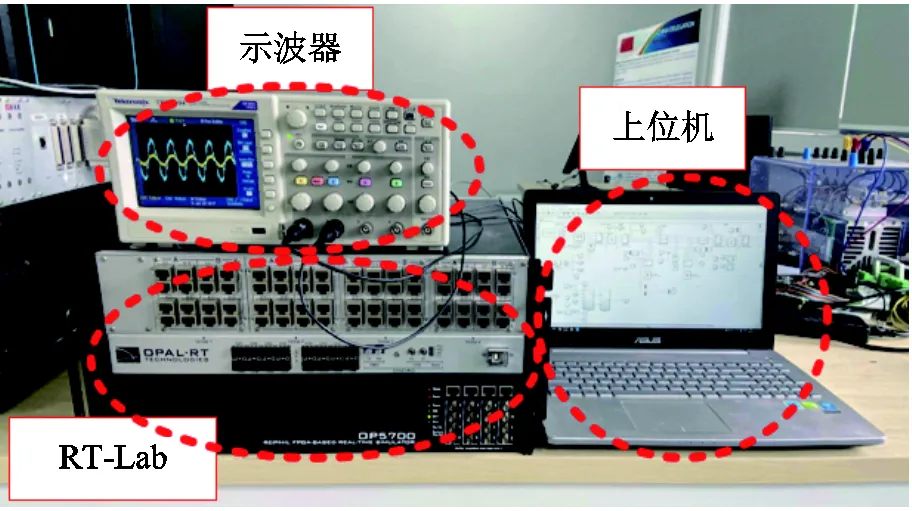
圖7 RT-LAB實時仿真平臺
仿真系統中的關鍵參數見表1,火電機組容量、線路等其他參數參考文獻[18, 37]。4.1節~4.3節中風電裝機容量為215 MW,風電滲透率為35%。基于雙向慣量支撐能力的評估結果,umin=5.38 m/s,u1=5.6 m/s,u2=8.85 m/s,dmin=5.52 m/s,d1=6.53 m/s,d2=9.46 m/s,為便于文字描述并使讀者更直觀地感受風速大小,本文基于圖3定義低風速區間為[umin,d1),中風速區間為[d1,d2),高風速區間為[d2,wn]。
表1 仿真系統關鍵參數

Tab.1 Parameter values of the simulation system
4.1 中風速小擾動場景
設置風電場風速為8 m/s,=5 s時負荷突增0.005 2(pu)的擾動(以總裝機容量為標幺化基準值),風電場分別采用自適應慣量控制策略、文獻[18]所提模糊自適應控制策略、大慣量系數控制策略和國標[7]中規定的慣量控制策略(后文簡稱標準策略),系統的頻率、頻率變化率(Rate of Change of Frequency, ROCOF)、風電有功功率、風機轉速和風電慣量系數如圖8所示,仿真結果見表2。表2中頻率最低點為在本次擾動下頻率跌落的最低值;跌落時間為擾動開始至頻率跌落到最低值之間的時間。
當系統受到小負荷擾動時,由于頻率變化較小,對慣量支撐的需求不高。從圖8a及表2中可以看出,自適應慣量控制和模糊自適應控制的控制效果相似,介于標準策略和大慣量系數控制策略之間。由于負荷擾動較小,系統對慣量支撐的需求較低,頻率無需提供強支撐而仍保持在正常范圍內波動。
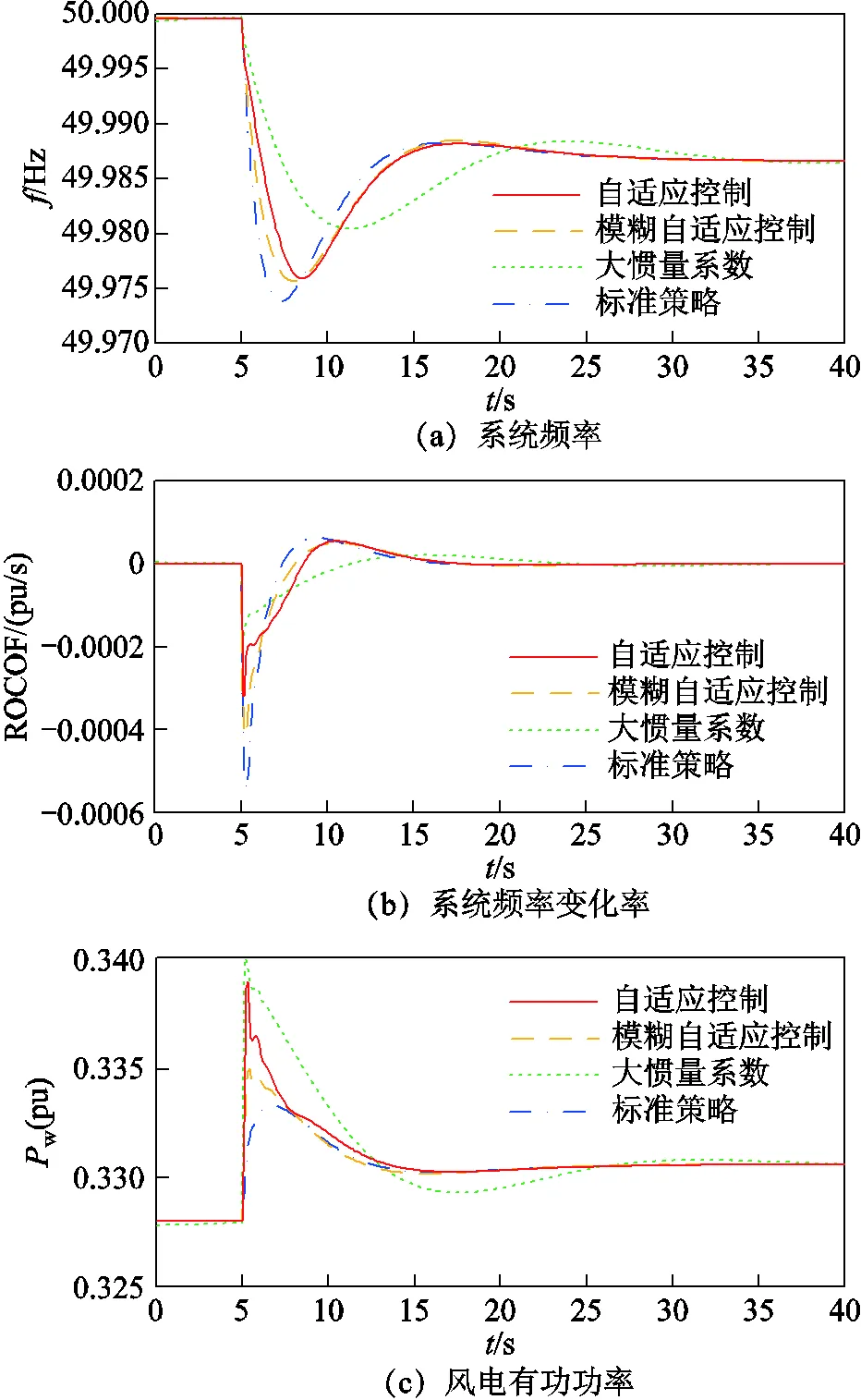
表2 中風速小擾動仿真結果

Tab.2 Simulation results with medium wind speed and small disturbance
4.2 低風速大擾動場景
設置風電場風速為6.5 m/s,=5 s時負荷突增0.035(pu)的擾動(以總裝機容量為標幺化基準值),系統的頻率、頻率變化率、風電有功功率、風機轉速和風電慣量系數如圖9所示,仿真結果見表3。

表3 低風速大擾動仿真結果

Tab.3 Simulation results with low wind speed and large disturbance
風電場在低風速狀態下由于慣量支撐能力有限,在系統受到大擾動時無法提供足夠的慣量支撐,若不根據慣量支撐能力評估結果相應地改變風電場控制策略,會導致風機轉速過度跌落從而退出調頻。從圖9c、圖9d中可以看出,大約在= 9s后采用模糊自適應控制和大慣量系數控制的風電場均由于到達轉速最低限值而退出調頻,無法應對后續頻率事件,而采用自適應慣量控制和標準慣量控制策略的風電場未退出調頻,因此在頻率恢復至穩態后仍能參與系統一次調頻。從圖9a及表3中可以看出,自適應慣量控制的系統頻率跌落最低值為49.846 Hz,明顯優于其他三種控制策略。
4.3 高風速大擾動場景
設置風電場風速為9.5 m/s,=5 s時負荷突增0.035(pu)的擾動(以總裝機容量為標幺化基準值),系統的頻率、頻率變化率、風電有功功率、風機轉速和風電慣量系數如圖10所示,仿真結果見表4。
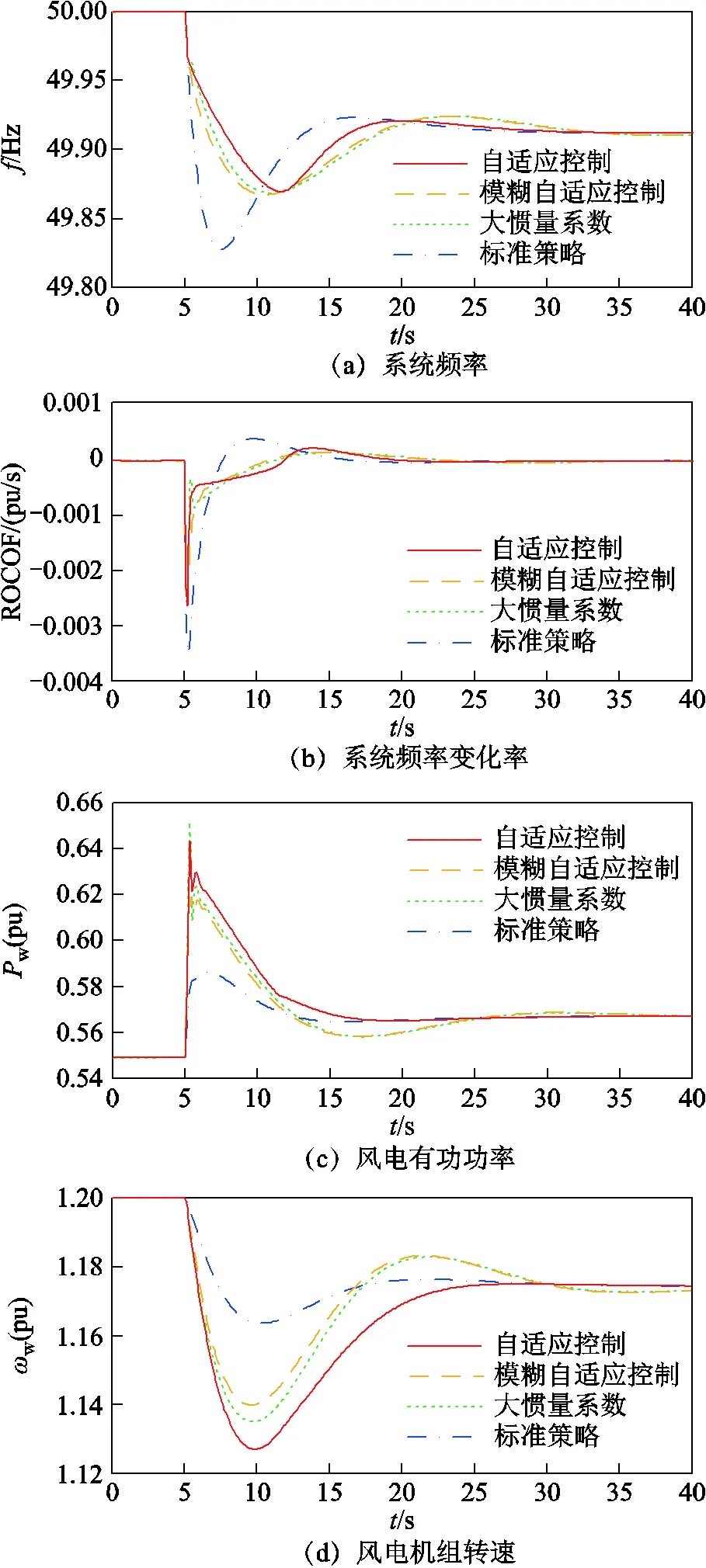
風電場在中、高風速下釋放動能的能力充足,在系統受到大擾動時能提供強慣量支撐。從圖10a及表4中可以看出,=5 s時系統發生擾動,自適應慣量控制系統頻率在=11.7 s時跌落至最低點49.870 Hz,比其他三種控制策略的跌落深度小且到達最低點的時間更長,跌落更緩慢,跌落時間分別比大慣量系數控制和模糊自適應控制長0.8 s(13.6%)和1.2 s(21.8%),能夠為其他調頻措施的響應爭取時間。從圖10c中可以看出,自適應慣量控制在頻率跌落時提供較大的有功功率支撐,而穩態時由于一次調頻系數相同,四種控制策略的一次調頻功率相同。結合圖10b和圖10c可以看出,系統頻率變化率在擾動初始時刻超過了-0.04 Hz/s,自適應慣量系數快速升高;對比圖8b和圖8e,在系統受到小擾動時,自適應慣量系數升高幅度較小,驗證了所設計的自適應慣量系數可以根據受擾動大小而改變。由于風速較高,風電機組轉子存儲的動能更多,根據圖10 d可知,采用自適應慣量控制時風電機組轉子轉速跌落幅度最大,釋放了更多動能,對風電慣量支撐能力的利用更充分。根據圖10e可知,自適應慣量控制的慣量系數在=5 s擾動發生后迅速升至150(pu),約為大慣量系數控制的2倍,但由于風電有功爬坡率最大為0.45(pu)/s[13],風電出力增量并沒有達到其他控制策略2倍的水平。
表4 高風速大擾動仿真結果

Tab.4 Simulation results with high wind speed and large disturbance
4.4 不同風電滲透率場景
為進一步驗證所提自適應慣量控制策略的有效性,增加了風電滲透率為12%和50%的算例分析。考慮到連續擾動包含了階躍和斜坡擾動也更貼合實際,且4.3節中設置的低風速大擾動場景會出現退出調頻的現象,需要觀察滲透率變化后所提自適應慣量控制是否仍能保證風電機組轉速在安全范圍內運行。因此,給出了風電滲透率為12%和50%時中風速連續擾動和低風速大擾動場景下系統的頻率響應特性,除風電場容量、風速和系統所受擾動之外的其他參數與4.3節相同。
不同滲透率下風電并網系統多場景頻率響應曲線如圖11所示。通過對比圖9a、圖11e和圖11f可以看出,當風電退出調頻后,風電滲透率為50%時系統的頻率的跌落幅度更深,跌落時間更長,說明風電滲透率越高,風電場對于電力系統頻率特性的影響越顯著。在此場景下模糊自適應控制和大慣量系數控制的風電場因轉速跌至0.7(pu)導致退出調頻,由于傳統機組占比減小,頻率二次跌落的幅度也更大。因此風電滲透率越高,考慮風電慣量支撐能力的意義也更重要。

不同滲透率下風電自適應慣量系數曲線如圖12所示。通過對比圖11b~圖11d和圖12中=7~13 s曲線可以看出,隨著滲透率提升,相同擾動下風電提供慣量支撐所需的慣量系數更小,這是因為控制系統中的控制信號均為標幺值,風電裝機容量提升后更小的慣量系數即可實現相似效果的慣量支撐。因此,大慣量系數控制中由于慣量系數為常數,其在滲透率為50%時實際慣量支撐功率比滲透率35%和12%更高,這也是導致圖11d中=12 s時自適應慣量控制的頻率跌落最低值比大慣量系數低,而滲透率為12%時(圖11b)跌落最低值幾乎相同的原因,該現象說明自適應慣量控制策略能根據風電滲透率自適應地調整支撐強度。
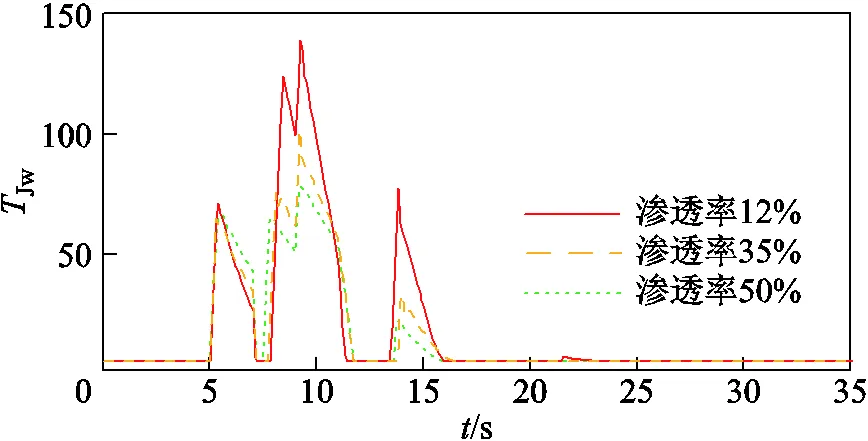
圖12 不同滲透率下風電自適應慣量系數曲線
綜合仿真分析結果可以看出:考慮雙向支撐能力的自適應慣量控制策略在低風速下能保證風電運行在安全轉速范圍,在高風速大擾動仿真場景下能提供有力慣量支撐,能有效延緩系統的頻率跌落,在中風速下能達到與模糊自適應控制相似的控制效果。即本文所提策略會根據風電機組的不同工況自適應地改變慣量系數,保證風電機組正常運行的同時提供其能力范圍內的慣量支撐。同時,可以根據系統頻率的變化率和變化方向自適應地改變慣量系數,實現了考慮系統實際需求的合理的慣量支撐。
5 結論
本文針對并網風電系統提出了一種自適應慣量控制策略,使得風電機組能夠為系統提供更加靈活、合理的慣量支撐,具體結論如下:
1)通過定量分析風電機組在不同風速區間和不同轉速下的動能吸收/釋放能力,給出了風電機組的動能吸收/釋放能力曲線,發現風機在中風速的動能吸收/釋放能力均較其他風速區間更強,且在高風速下風機無法吸收動能。當規定風機對頻率上升/下跌事件的功率調節裕度相同時,在中、高風速區間內其對頻率下降的慣量支撐能力比頻率上升事件更強。
2)提出了能夠根據風電機組自身慣量支撐能力和系統慣量支撐需求自適應地修改虛擬慣量系數的自適應慣量控制策略,所設計的自適應慣量控制參數能夠確保閉環控制系統的小擾動穩定,同時使得風電機組具備良好的頻率動態特性。
3)相同滲透率不同風速和擾動下的仿真結果表明,所提自適應慣量控制策略能在低風速下降低慣量系數以保證風電運行在安全轉速范圍內,在中風速下能夠提供與模糊自適應控制相當的慣量支撐效果,在高風速大擾動下能夠提供有力慣量支撐,頻率跌落速度比已有典型控制策略有所減小。不同滲透率下的仿真結果表明,基于減載的穩態工況,所提自適應慣量控制策略在算例場景中均能保證風電機組轉速在安全范圍內運行,且能隨著滲透率的提高自適應地調整慣量系數以匹配風電慣量支撐能力和系統慣量支撐需求。

[1] 汪夢軍, 郭劍波, 馬士聰, 等. 新能源電力系統暫態頻率穩定分析與調頻控制方法綜述[J]. 中國電機工程學報, 2023, 43(5): 1672-1693. Wang Mengjun, Guo Jianbo, Ma Shicong, et al. Review of transient frequency stability analysis and frequency regulation control methods for renewable power systems[J]. Proceedings of the CSEE, 2023, 43(5): 1672-1693.
[2] 高丙團, 胡正陽, 王偉勝, 等. 新能源場站快速有功控制及頻率支撐技術綜述[J/OL]. 中國電機工程學報, 2023: 1-16. http://kns.cnki.net/kcms/detail/11.2107. TM.20230530.1551.003.html. Gao Bingtuan, Hu Zhengyang, Wang Weisheng, et al. review on fast active power control and frequency support technologies of renewable energy stations [J/OL]. Proceedings of the CSEE, 2023: 1-16. http:// kns.cnki.net/kcms/detail/11.2107.TM.20230530.1551. 003.html.
[3] 張祥宇, 胡劍峰, 付媛, 等. 風儲聯合系統的虛擬慣量需求與協同支撐技術[J/OL]. 電工技術學報, 2023: 1-14. DOI:10.19595/j.cnki.1000-6753.tces. 221977. Zhang Xiangyu, Hu Jianfeng, Fu Yuan, et al. Virtual inertia demand and collaborative support technology of wind power and energy storage system[J/OL]. Transactions of China Electrotechnical Society, 2023: 1-14. DOI: 10.19595/j.cnki.1000-6753. tces.221977.
[4] 程鵬, 馬靜, 李慶, 等. 風電機組電網友好型控制技術要點及展望[J]. 中國電機工程學報, 2020, 40(2): 456-466. Cheng Peng, Ma Jing, Li Qing, et al. Key points and prospect of grid-friendly control technology for wind turbines[J]. Proceedings of the CSEE, 2020, 40(2): 456-466.
[5] 顏湘武, 王德勝, 楊琳琳, 等.直驅風機慣量支撐與一次調頻協調控制策略[J]. 電工技術學報, 2021, 36(15): 3282-3292. YanXiangwu, Wang Desheng, Yang Linlin, et al. Coordinated control strategy of inertia support andprimary frequency regulation of PMSG[J]. Transactions of China Electrotechnical Society, 2021, 36(15): 3282-3292.
[6] 李少林, 王偉勝, 張興, 等. 基于頻率響應區間劃分的風電機組虛擬慣量模糊自適應控制[J]. 電網技術, 2021, 45(5): 1658-1664. Li Shaolin, Wang Weisheng, Zhang Xing, et al. Fuzzy adaptive virtual inertia control strategy of wind turbines based on system frequency response interval division[J]. Power System Technology, 2021, 45(5): 1658-1664.
[7] 國家市場監督管理總局, 國家標準化管理委員會. 風電場接入電力系統技術規定第1部分:陸上風電: GB/T 19963.1—2021[S]. 北京: 中國標準出版社, 2021.
[8] Kheshti M, Lin Shuyue, Zhao Xiaowei, et al. Gaussian distribution-based inertial control of wind turbine generators for fast frequency response in low inertia systems[J]. IEEE Transactions on Sustainable Energy, 2022, 13(3): 1641-1653.
[9] 張冠鋒, 楊俊友, 孫峰, 等. 基于虛擬慣量和頻率下垂控制的雙饋風電機組一次調頻策略[J]. 電工技術學報, 2017, 32(22): 225-232. Zhang Guanfeng, Yang Junyou, Sun Feng, et al. Primary frequency regulation strategy of DFIG based on virtual inertia and frequency droop control[J]. Transactions of China Electrotechnical Society, 2017, 32(22): 225-232.
[10] Hwang M, Muljadi E, Jang G, et al. Disturbance-adaptive short-term frequency support of a DFIG associated with the variable gain based on the ROCOF and rotor speed[J]. IEEE Transactions on Power Systems, 2017, 32(3): 1873-1881.
[11] Lee J, Jang G, Muljadi E, et al. Stable short-term frequency support using adaptive gains for a DFIG-based wind power plant[J]. IEEE Transactions on Energy Conversion, 2016, 31(3): 1068-1079.
[12] 李穎穎, 王德林, 范林源, 等. 雙饋風電機組限功率運行下頻率穩定的變系數控制策略[J]. 電網技術, 2019, 43(8): 2910-2917. Li Yingying, Wang Delin, Fan Linyuan, et al. Variable coefficient control strategy for frequency stability of DFIG under power-limited operation[J]. Power System Technology, 2019, 43(8): 2910-2917.
[13] Wu Yuankang, Yang Wuhan, Hu Yiliang, et al. Frequency regulation at a wind farm using time-varying inertia and droop controls[J]. IEEE Transactions on Industry Applications, 2019, 55(1): 213-224.
[14] 林俐, 李曉鈺, 王世謙, 等. 基于分段控制的雙饋風電機組有功-頻率控制[J]. 中國電力, 2012, 45(2): 49-53. Lin Li, Li Xiaoyu, Wang Shiqian, et al. An active power-frequency control strategy of a DFIG based on subsection control[J]. Electric Power, 2012, 45(2): 49-53.
[15] 顏湘武, 崔森, 常文斐. 考慮儲能自適應調節的雙饋感應發電機一次調頻控制策略[J]. 電工技術學報, 2021, 36(5): 1027-1039. Yan Xiangwu, Cui Sen, Chang Wenfei. Primary frequency regulation control strategy of doubly-fed induction generator considering supercapacitor SOC feedback adaptive adjustment[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 1027-1039.
[16] Hwang M, Muljadi E, Park J W, et al. Dynamic droop-based inertial control of a doubly-fed induction generator[J]. IEEE Transactions on Sustainable Energy, 2016, 7(3): 924-933.
[17] 周天沛, 孫偉. 高滲透率下變速風力機組虛擬慣性控制的研究[J]. 中國電機工程學報, 2017, 37(2): 486-495. Zhou Tianpei, Sun Wei. Study on virtual inertia control for DFIG-based wind farms with high penetration[J]. Proceedings of the CSEE, 2017, 37(2): 486-495.
[18] 柯賢波, 張文朝, 李朋旺, 等. 高風電滲透率系統的模糊自適應虛擬慣量控制[J]. 電網技術, 2020, 44(6): 2127-2134. Ke Xianbo, Zhang Wenchao, Li Pengwang, et al. Fuzzy adaptive virtual inertia control for high wind power penetration system[J]. Power System Technology, 2020, 44(6): 2127-2134.
[19] Li Meiyi, Huang Wentao, Tai Nengling, et al. A dual-adaptivity inertia control strategy for virtual synchronous generator[J]. IEEE Transactions on Power Systems, 2020, 35(1): 594-604.
[20] Lü Xue, Jia Youwei, Xu Zhao. A novel control strategy for wind farm active power regulation considering wake interaction[J]. IEEE Transactions on Sustainable Energy, 2020, 11(2): 618-628.
[21] 穆鋼, 蔡婷婷, 嚴干貴, 等. 雙饋風電機組參與持續調頻的雙向功率約束及其影響[J]. 電工技術學報, 2019, 34(8): 1750-1759. Mu Gang, Cai Tingting, Yan Gangui, et al. Bidirectional power constraints and influence of doubly fed induction generator participating in continuous frequency regulation[J]. Transactions of China Electrotechnical Society, 2019, 34(8): 1750-1759.
[22] 毛永恒, 高丙團, 胡正陽, 等. 計及雙饋機組直流卸荷的風電場緊急降功率控制策略[J/OL]. 中國電機工程學報, 2023: 1-5. http://kns.cnki.net/kcms/ detail/11.2107.tm. 20230619.1644.003.html MaoYongheng, Gao Bingtuan, Hu Zhengyang, et al. emergency power reduction control strategy of wind farm considering DC chopper of doubly-fed induction generator[J/OL]. Proceedings of the CSEE, 2023: 1-15. http:// kns.cnki.net/kcms/detail/11.2107.tm.20230619. 1644.003.html.
[23] 胡家欣, 胥國毅, 畢天姝, 等. 減載風電機組變速變槳協調頻率控制方法[J]. 電網技術, 2019, 43(10): 3656-3662. Hu Jiaxin, Xu Guoyi, Bi Tianshu, et al. A strategy of frequency control for deloaded wind turbine generator based on coordination between rotor speed and pitch angle[J]. Power System Technology, 2019, 43(10): 3656-3662.
[24] 劉昊宇, 劉崇茹, 董浩云. 含風電場的MMC-MTDC系統通用頻率響應模型[J]. 電力系統自動化, 2023, 47(5): 123-133. Liu Haoyu, Liu Chongru, Dong Haoyun. General frequency response model of MMC-MTDC system integrated with wind farms[J]. Automation of Electric Power Systems, 2023, 47(5): 123-133.
[25] 耿華, 許德偉, 吳斌, 等. 永磁直驅變速風電系統的控制及穩定性分析[J]. 中國電機工程學報, 2009, 29(33): 68-75. Geng Hua, Xu Dewei, Wu Bin, et al. Control and stability analysis for the permanent magnetic synchronous generator based direct driven variable speed wind energy conversion system[J]. Proceedings of the CSEE, 2009, 29(33): 68-75.
[26] 王剛, 侍喬明, 崔志勇, 等. 一種風力機虛擬慣量控制與傳統發電機調速控制的協調方法[J]. 電網技術, 2015, 39(10): 2794-2801. Wang Gang, Shi Qiaoming, Cui Zhiyong, et al. A coordinated strategy of virtual inertia control of wind turbine and governor control of conventional generator[J]. Power System Technology, 2015, 39(10): 2794-2801.
[27] Mauricio J M, Marano A, Gomez-Exposito A, et al. Frequency regulation contribution through variable-speed wind energy conversion systems[J]. IEEE Transactions on Power Systems, 2009, 24(1): 173-180.
[28] 滕賢亮, 談超, 昌力, 等. 高比例新能源電力系統有功功率與頻率控制研究綜述及展望[J]. 電力系統自動化, 2023, 47(15): 12-35. Teng Xianliang, Tan Chao, Chang Li, et al. Review and prospect of research on active power and frequency control in power system with high proportion of renewable energy[J]. Automation of Electric Power Systems, 2023, 47(15): 12-35.
[29] 奧博宇, 王方政, 陳磊, 等. 風電機組變槳減載一次調頻模型及聚合方法[J]. 電網技術, 2023, 47(4): 1360-1368. Ao Boyu, Wang Fangzheng, Chen Lei, et al. Primary frequency regulation model and aggregation of deloading wind turbine generators with pitch angle adjustment[J]. Power System Technology, 2023, 47(4): 1360-1368.
[30] 李世春, 呂翔生, 鐘浩, 等. 大規模雙饋風電機組參與調頻的電網自適應低頻減載策略[J]. 電力系統自動化, 2019, 43(15):109-115. Li Shichun, Lv Xiangsheng, Zhong Hao, et al. adaptive under-frequency load shedding strategy of power grid with large-scale DFIG wind turbines participating in frequency regulation[J]. Automation of Electric Power Systems, 2019, 43(15): 109-115.
[31] Li Yujun, Xu Zhao, Zhang Jianliang, et al. Variable utilization-level scheme for load-sharing control of wind farm[J]. IEEE Transactions on Energy Conversion, 2018, 33(2): 856-868.
[32] 王鑫, 楊德健. 基于變系數PI控制的雙饋風電機組自適應轉速恢復策略[J]. 電工技術學報, 2023, 38(15): 4120-4129. Wang Xin, Yang Dejian. Adaptive speed recovery strategy of doubly-fed induction generator based on variable PI control coefficient[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 4120-4129.
[33] 張正陽, 殷明慧, 李陽, 等. 考慮機組穩定約束的風機一次調頻控制策略[J]. 中國電機工程學報, 2023, 43(4): 1471-1480. Zhang Zhengyang, Yin Minghui, Li Yang, et al. Turbine stability-constrained primary frequency control of wind turbine generator[J]. Proceedings of the CSEE, 2023, 43(4): 1471-1480.
[34] Dreidy M, Mokhlis H, Mekhilef S. Inertia response and frequency control techniques for renewable energy sources: a review[J]. Renewable and Sustainable Energy Reviews, 2017, 69: 144-155.
[35] Wang Ye, Delille G, Bayem H, et al. High wind power penetration in isolated power systems—assessment of wind inertial and primary frequency responses[J]. IEEE Transactions on Power Systems, 2013, 28(3): 2412-2420.
[36] 李兆偉, 吳雪蓮, 莊侃沁, 等. “9·19”錦蘇直流雙極閉鎖事故華東電網頻率特性分析及思考[J]. 電力系統自動化, 2017, 41(7): 149-155. Li Zhaowei, Wu Xuelian, Zhuang Kanqin, et al. Analysis and reflection on frequency characteristics of East China grid after bipolar locking of “9·19” Jinping-Sunan DC transmission line[J]. Automation of Electric Power Systems, 2017, 41(7): 149-155.
[37] 張祥宇, 朱永健, 付媛. 基于系統慣量需求的風儲協同快速頻率響應技術[J]. 中國電機工程學報, 2023, 43(14): 5415-5429. ZhangXiangyu, Zhu Yongjian, Fu Yuan. wind-storage cooperative fast frequency response technology based on system inertia demand[J]. Proceedings of the CSEE, 2023, 43(14): 5415-5429.
Bidirectional Support Capability Analysis and Adaptive Inertial Control Strategy of Wind Turbine
Hu Zhengyang1Gao Bingtuan1Zhang Lei2Wang Wenzhuo3Pan Shenkai1
(1. School of Electrical Engineering Southeast University Nanjing 210096 China 2. National Key Laboratory of Renewable Energy Grid-Integration China Electric Power Research Institute Nanjing 210003 China 3. Northwest Branch of State Grid Corporation of China Xi’an 710048 China)
Inertial response is one of the fast-transient frequency support control methods. In the latest wind farm grid-connected technical specification in China, wind farms are required to have inertial response capabilities. However, the current research on the design of inertial control parameters still needs investigation. When evaluating the kinetic energy stored in the rotor of the wind turbine, the existing literature mostly takes the difference between the current speed and the lower limit of the speed as the baseline value, which makes the speed of the wind turbine drop to the left side of the MPPT point, jeopardizing the small disturbance stability of the wind turbine. In addition, the current research mostly focuses on solving the inertial support of frequency drop events, while ignoring the problem of insufficient power reduction capacity of wind turbines with low wind speed and high wind speed. To address these issues, this paper proposes an adaptive inertial control strategy for wind turbine considering bidirectional support capability for wind power integrated power system.
Firstly, based on the typical model of power system integrated with wind power generation, the frequency dynamic response characteristics of the system with different wind power penetrations, control parameters and disturbances were analyzed. Secondly, considering the relationship curves of wind power output and rotor speed, the inertial support capability of wind turbines to frequency rise and drop events was analyzed quantitatively. Thirdly, the adaptive inertial control strategy of wind power generation was proposed.An adaptive inertia coefficient with upper and lower limits, left and right symmetry and adjustable sensitivity to the rate of change of frequency was designed. The upper limit was determined by the inertial support capability evaluation using the Newton-Raphson method, the lower limit was set based on the Chinese national standard, and the sensitivity coefficient was designed according to the inertial support requirement of power system. Finally, the small-signal stability of the control system was analyzed according to the eigenvalue loci.
The simulation results show that the proposed adaptive inertial control strategy can reduce the inertia coefficient at low wind speed to ensure that the wind turbine operates within the safe speed range. It can provide strong inertial support with high wind speed and large disturbance, and the frequency drop depth is smaller than the existing typical control strategies. Besides, the proposed adaptive inertia control strategy can ensure that the wind turbine operates within a safe rotor speed range based on the steady-state condition of deloading and can adaptively adjust the inertia coefficient with the increase of the wind power penetration to match the wind power inertial support capability and power system inertial support requirements.
Through this investigation, the following conclusions are drawn: (1) Through quantitatively analyzing the kinetic energy absorption/release capacity of the wind turbine, it is indicated that the kinetic energy absorption/release capacity of the wind turbine at medium wind speed is stronger than that at other wind speed ranges, and the wind turbine cannot absorb kinetic energy at high wind speed. (2) Provided that the power regulation range of the wind turbine for frequency rise/drop events is the same, the inertial supportcapability of the wind turbine for frequency drop is stronger than that for frequency rise events in the middle and high wind speed ranges. (3) Simulation results show that compared with the existing typical strategies, the proposed strategy can improve the frequency characteristics of scenarios with low and high wind speed.
Wind turbine, inertial support, frequency characteristics, adaptive control, small-signal analysis
10.19595/j.cnki.1000-6753.tces.230981
TM614; TM712
國家電網公司總部科技項目資助(4000-20236084A-1-1-ZN)。
2023-06-25
2023-08-09
胡正陽 男,1994年生,博士研究生,研究方向為新能源發電并網控制等。E-mail:huzhengyang@seu.edu.cn
高丙團 男,1981年生,博士,教授,博士生導師,研究方向為機器人與智能電力運維、新能源發電并網控制、分布式供能與需求響應等。E-mail:gaobingtuan@seu.edu.cn(通信作者)
(編輯 郭麗軍)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
能源工程(2020年6期)2021-01-26 00:55:22
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
