位置伺服永磁電機魯棒性無差拍預測轉速控制
2023-10-12 05:59:04溫從劍朱辰雨張子越余開亮
電工技術學報 2023年19期
王 政 溫從劍 朱辰雨 張子越 余開亮 程 明
位置伺服永磁電機魯棒性無差拍預測轉速控制
王 政 溫從劍 朱辰雨 張子越 余開亮 程 明
(東南大學電氣工程學院 南京 210096)
為了提高永磁同步電機位置伺服系統的控制性能,該文提出一種魯棒性無差拍預測轉速控制策略。首先,根據無差拍控制原理對速度環和電流環進行設計。其次,采用增量模型消除了永磁磁鏈對電流預測的影響。再次,設計擴展狀態觀測器,對參數不匹配、負載和逆變器非線性造成的擾動進行觀測。然后,根據位置伺服系統的特點提出一種補償策略。最后,通過實驗對提出的控制策略進行研究,實驗結果表明,該方法能提高系統的穩態控制精度和動態響應速度。
位置伺服系統 無差拍預測轉速控制 擴展狀態觀測器 補償策略
0 引言
永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)驅動系統[1-2]由于具有高功率密度、高效率和結構緊湊等特點,被廣泛地應用于伺服系統中。磁場定向控制是PMSM驅動廣泛應用的控制策略。在位置伺服系統中,為了獲得精確的穩態跟蹤效果和快速的動態響應,傳統PI控制[3]是設計速度環和電流環時常用的方法。伺服電動機要求在各種工況、電機內部參數變化和外部擾動的影響下都能保持理想的工作性能,因此對PI控制器的參數提出了更高的要求。
近些年,預測控制由于具有較好的自適應能力和良好的動態性能,逐漸成為研究熱點[4-8]。預測控制主要可以分為兩類:模型預測控制(Model Predictive Control, MPC)[9-11]和無差拍預測控 制[12-13]。MPC利用電機離散模型預測未來的工作狀態,進而可以根據價值函數確定最優的工作電壓矢量。文獻[10]提出了一種用于永磁同步電機的模型預測直接轉速控制(Model Predictive Direct Speed Control, MPDSC)方法。該方法結構簡單,無需脈沖寬度調制(Pulse Width Modulation, PWM),但精確的預測需要較大的計算量,對硬件條件要求較高,限制了其在工業中的應用。無差拍預測控制基于系統離散模型計算每個采樣周期的參考電壓矢量,通過PWM轉換為開關信號,能在較小的計算量下獲得相近的動態性能和更好的穩態跟蹤效果。因此,無差拍預測電流控制(Deadbeat Predictive Current Control, DPCC)被應用在很多工業領域。但是,目前很少有文獻提到速度環和電流環均采用基于離散模型設計的無差拍預測轉速控制(Deadbeat Predi- ctive Speed Control, DPSC)方法,因此將無差拍預測控制同時用于永磁同步電機電流環與速度環,改善位置伺服電動機的性能還值得進一步深入研究。
無論是MPDSC還是DPSC都需要精確的控制模型,包括電機的電氣參數、機械參數以及負載信息。一方面,電機的電氣參數會隨著運行工況以及溫度的變化而發生變化,機械參數無法通過直接測量獲得,而負載轉矩則需要通過額外的裝置進行測量。另一方面,逆變器非線性會影響預測的精度從而降低系統的性能。可以采用電機在線參數辨識的方法來解決模型預測控制中的模型準確度問題。文獻[14]中提出了一種基于模型參考自適應系統(Model Reference Adaptive System, MRAS)的參數估計方法,為了解決欠秩問題,通過將一些參數作為已知的固定值來估計其他參數。但由于電機參數實時變化而無法固定,因此會導致MRAS得到參數辨識結果不準確。文獻[15]提出了一種基于磁鏈注入的參數辨識方法,能夠實現對電機電氣參數的辨識,但是額外的信號注入會影響系統正常的運行狀態。文獻[16]提出了一種基于粒子群優化算法的參數辨識方法,可以對電機參數以及逆變器非線性進行全局辨識。但是該方法必須在空載情況下應用,并且這種生物啟發式算法需要對大量數據進行迭代尋優,難以應用于實時數字處理器中。
另一種解決模型預測控制中模型準確度問題的方法是采用擾動觀測器[17-18]進行補償。文獻[17]基于滑模控制理論設計了一種全局參數擾動和負載觀測器,有效地提高了電機系統的魯棒性。但是滑模觀測器的效果依賴相關參數的合理選擇,目前尚未有相關文獻提出具體的選擇標準。文獻[18]提出了一種擴展狀態觀測器(Extended State Observer, ESO),可以對未知擾動進行準確觀測。ESO獨立于系統的數學模型,因此具有較強的魯棒性,但該文獻僅討論了其對電流環的性能改進,并沒有將其同時用于速度環和電流環預測控制中。文獻[19]采用無差拍控制策略來減小系統的動態響應時間,提出一種指數ESO加快觀測狀態的收斂速度,提升了系統的擾動抑制性能。文獻[20]針對電機周期性轉矩波動問題,提出了一種模塊化ESO,將指定次轉矩紋波作為待觀測狀態,有效減小周期性擾動對系統的影響。文獻[21]采用超螺旋滑模策略進行速度控制,提出一種有限時間ESO用于對系統的集中擾動進行觀測,從而進行控制器補償。與傳統ESO相比,有限時間ESO通過非線性函數的引入具有更高的觀測速度與精度。
本文針對PMSM位置伺服系統提出了一種魯棒性DPSC策略。相比于之前相關文獻,本文提出的控制策略具有如下特點:①基于PMSM離散模型和無差拍控制原理,設計了速度環和電流環,避免了級聯式PI控制器的設計,提高了系統的動態性能;②將ESO方法擴展應用至電流環與速度環同時采用預測控制的控制方法中,針對預測電流和預測轉速進行實時補償,提高了系統的魯棒性,避免了復雜的全局參數辨識過程;③結合位置伺服系統的特點,提出的控制方法采用位置跟隨補償策略,有效地提高了系統位置跟隨效果。
1 傳統無差拍轉速控制
本文研究對象為用于位置伺服的表貼式PMSM(Surface PMSM, SPMSM),d軸和q軸電感值相等,因此電磁轉矩和定子電壓可以表示為


其中
PMSM的機械方程可表示為

將式(1)代入式(4),機械方程可以改寫為
通過前向歐拉差分可得+1時刻預測的電機轉速為



為實現電機電流環的無差拍控制,將電機電壓方程式(3)進行離散化,根據時刻電壓、電流,可預測獲得+1時刻的電流為

其中


式中,s為電流采樣周期。根據式(8)可以推導出+1時刻的電壓方程為



圖1 基于DPSC策略的SPMSM位置伺服系統控制框圖
2 魯棒性無差拍轉速控制
為了提高DPSC的魯棒性,本文采用增量模型消除電流預測模型中永磁磁鏈的影響,并且設計了ESO對SPMSM其他參數不匹配、負載擾動以及逆變器非線性造成的擾動進行補償。
2.1 增量模型
由于電機機械時間常數遠大于電氣時間常數,可近似認為相鄰電流采樣周期中電機轉速不變,因此時刻的電壓方程中參數矩陣()與()不變。根據式(9)可得時刻的電壓為

將式(9)與式(11)相減,可得增量模型為

其中

2.2 擴展狀態觀測器
考慮到系統參數不匹配、負載擾動以及逆變器非線性等擾動時,電機定子電壓和轉速分別為
其中
式中,e和qe分別為電壓誤差和電流誤差。電壓和電流誤差可以擴展為ESO中的新狀態,通過ESO可以對電壓和電流誤差進行估算,在此基礎上可以針對預測電流和轉速進行實時補償。根據式(13),ESO可設計為

將式(14)進行離散化,并在電流預測中采用增量模型,可得d、q軸電流和轉速預測方程分別為

式中,為單位矩陣。





由式(16)可知,q軸電流參考值和電壓參考值計算依賴ESO得到的轉速、電流估計值以及電流、電壓誤差估計值,所以ESO是整個系統穩定的基礎。式(13)可以變為
式中,u和i分別為e和qe的變化率。
然后,根據式(14)和式(19),可得



ESO穩定性和系數矩陣c及w有關,相應特征方程為

根據Routh-Hurwitz判據,當式(22)中系數均為非負,即i1>0、i2>0、w1>0、w2>0時,ESO是穩定的。式(23)以期望觀測帶寬形式給出了ESO參數整定方法[22],有
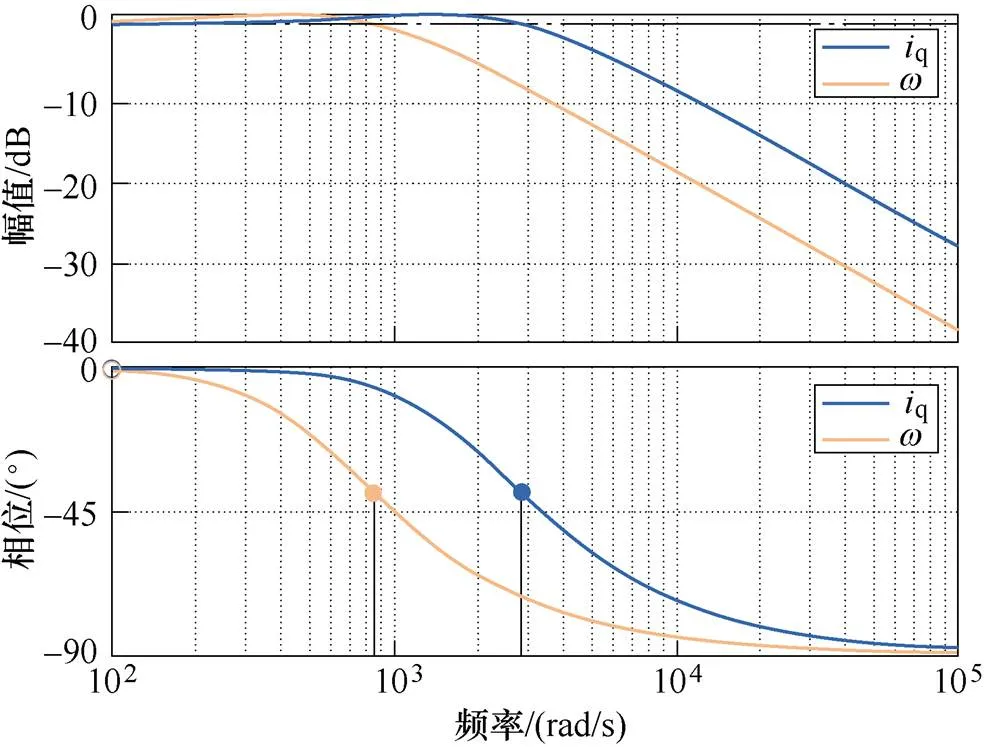
圖2 擴張狀態觀測器伯德圖
2.3 補償策略


式中,Pos*和Pos分別為系統給定位置和實際位置;Pos1為設定的給定位置和實際位置差值絕對值的閾值,本文選取Pos1=80脈沖;cnt為計數值;max為最大計數值。

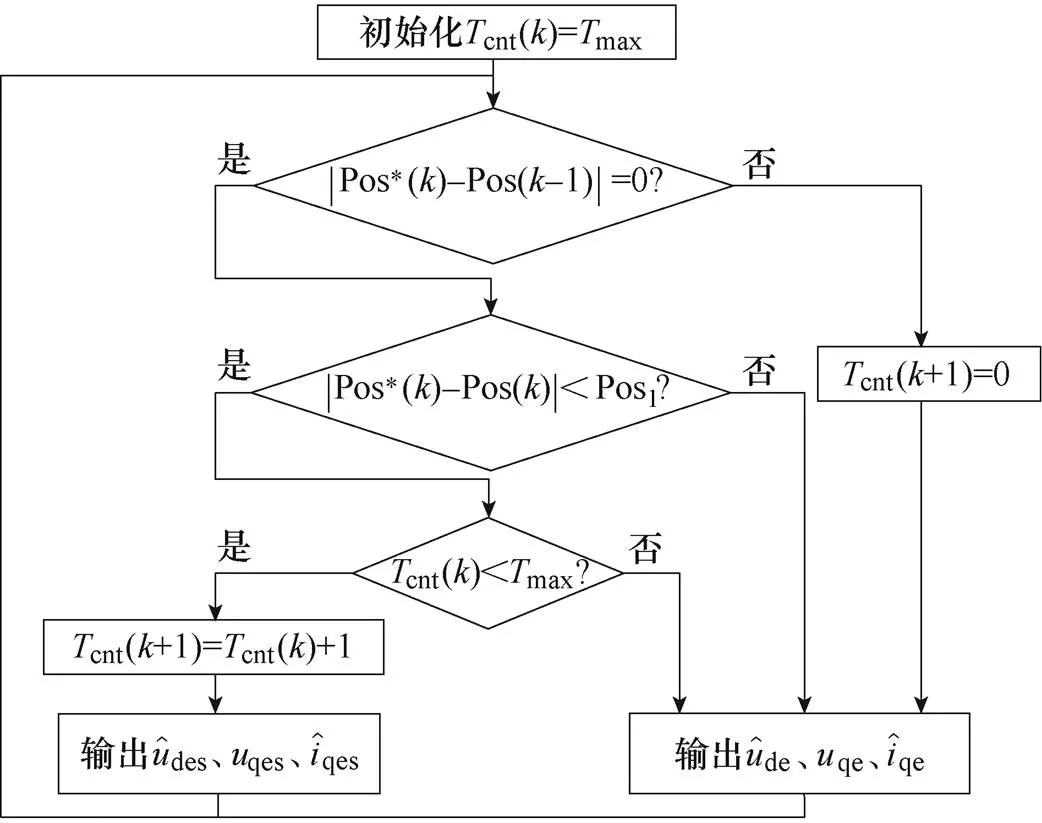
圖3 預測誤差補償策略流程
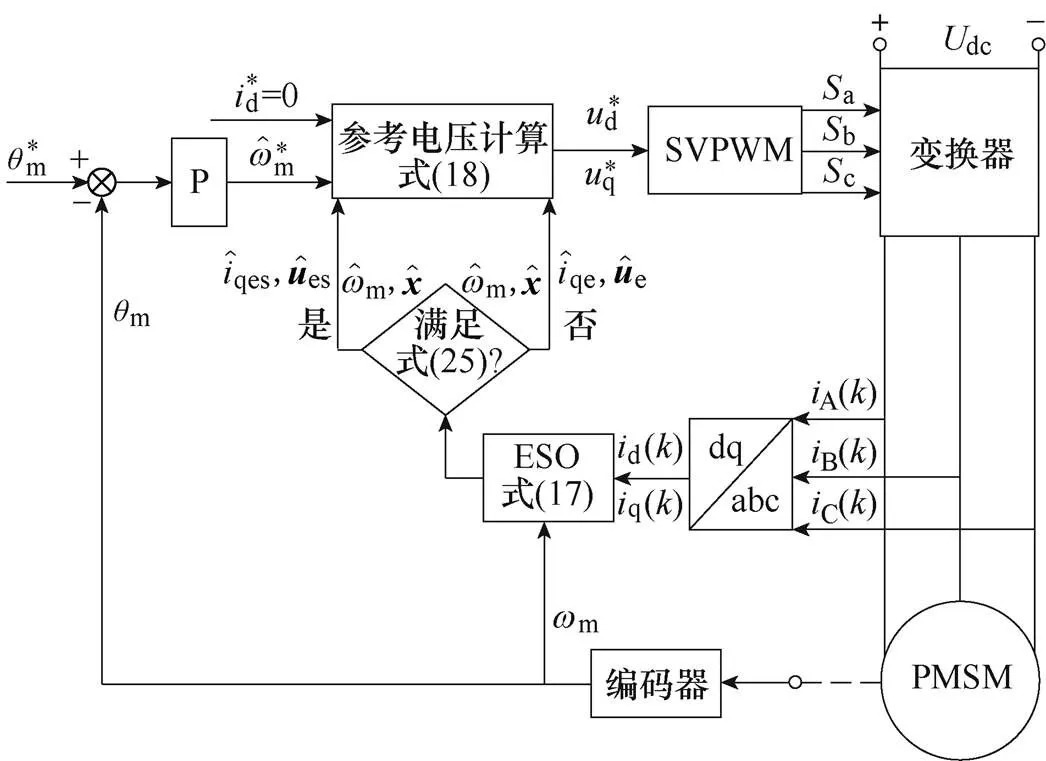
圖4 基于PR-DPSC策略的PMSM位置伺服系統控制框圖
3 實驗結果
為了驗證本文所提出的控制策略,搭建了兩電平三相PMSM實驗平臺,控制器為TMS320F28346,負載電機工作在恒轉矩模式。伺服系統的實驗參數見表1,均選取了電機銘牌標定值,負載轉矩采用人為給定方式。
圖5所示為采用DPSC策略時的實驗結果,當控制程序參數以及負載轉矩值和實際值一致時,可以看出穩態情況下實際位置與給定位置之間沒有誤差。當控制程序參數設置為額定值的兩倍、負載轉矩值設置為0 N·m時,由于程序控制參數以及負載轉矩值和實際負載轉矩值不一致,穩態情況下實際位置與給定位置之間出現了誤差,如圖5b所示。
表1 實驗參數

Tab.1 Experimental parameters

圖5 采用DPSC策略時給定階躍信號的實驗波形
圖6所示為在參數和負載轉矩值設置與實際值不匹配的情況下采用魯棒-無差拍預測轉速控制(Robust-DPSC, R-DPSC)策略時的實驗波形。由于ESO的作用,穩態情況下實際位置與給定位置之間的誤差得到了消除,并且電流可以控制在最大電流范圍之內。由2.3節中的分析可知,因為對誤差的估計是一個積分過程,在實際位置接近給定位置時系統會出現振蕩,到達給定位置的時間也由圖5a中所示的70 ms增加到84 ms。
圖7為采用預測誤差補償魯棒-無差拍預測轉速控制(PR-DPSC)策略的實驗波形。控制信號電平高低表示采用不同補償量的切換過程,式(25)中,max的值可以根據位置振蕩過程具體時間來選取。

圖6 采用R-DPSC策略時給定階躍信號的實驗波形

圖7 采用PR-DPSC策略時給定階躍信號的實驗波形
同樣地,在控制參數以及負載轉矩值設置與實際值不匹配的情況下,可以看出采用所提出的補償策略后,穩態情況下實際位置與給定位置之間沒有誤差,并且實際位置接近給定位置時振蕩現象得到消除,系統到達給定位置的時間也由84 ms減少到了62 ms。
為了進一步評估所提出的PR-DPSC策略控制性能,在相同的實驗條件下,分別采用PI控制和DPCC策略進行了相關實驗比較。如圖8、圖9所示,PI控制的速度環和電流環以及DPCC策略的速度環均已調至最優,可以看出采用PI控制和DPCC策略時,系統到達給定位置的時間分別為94 ms和86 ms。通過三種不同控制方法實驗結果的比較,可以證明PR-DPSC策略具有更好的控制效果。
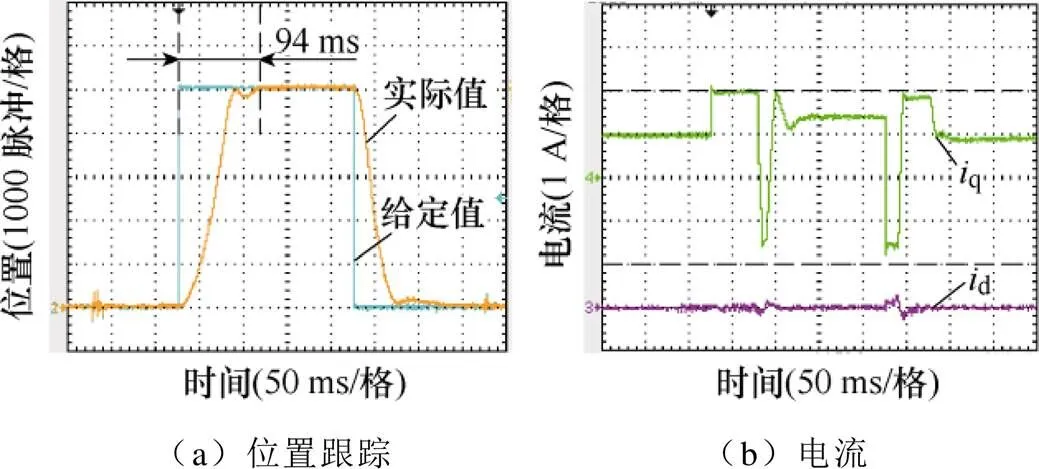
圖8 采用PI控制時給定階躍信號的實驗波形
圖10為采用不同預測控制策略時系統抗擾動性能實驗波形對比。由于在負載突變時系統給定位置沒有發生變化,此時R-DPSC與PR-DPSC是等價的,因此僅給出了PR-DPSC和DPSC的對比結果。
采用DPCC策略時,系統在負載突變時實際位置偏離給定位置的最大誤差為122脈沖,75 ms后實際位置與給定位置間的誤差得到消除。采用PR- DPSC時,系統在負載突變情況下實際位置偏離給定位置的最大誤差為70脈沖,55 ms后實際位置與給定位置間的誤差得到消除。可以看出,相比DPCC策略,所提出的PR-DPSC策略具有更好的抗擾動性能。
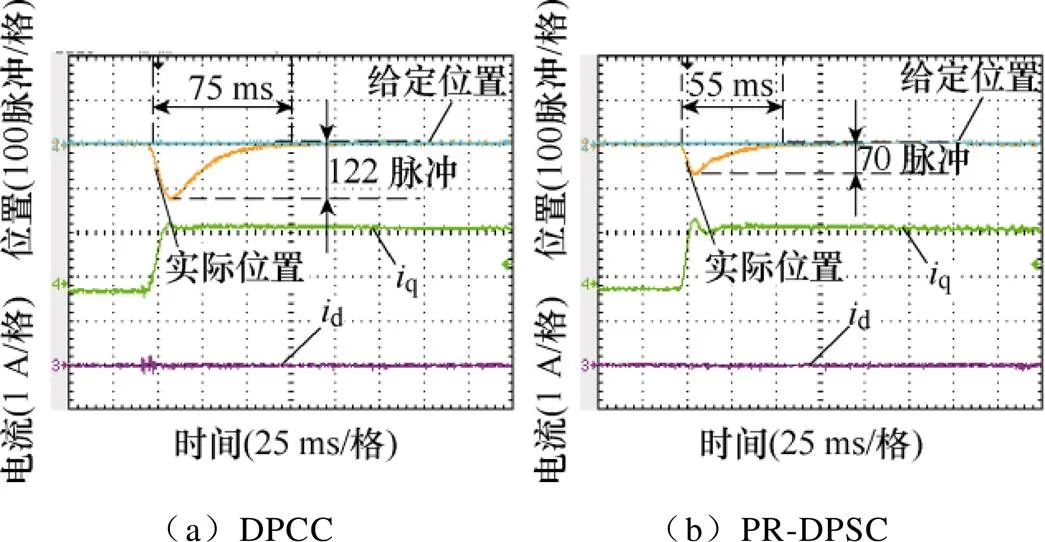
圖10 負載突變情況下采用DPCC策略和 PR-DPSC策略時的實驗波形
4 結論
本文研究了基于DPSC策略的魯棒性位置伺服PMSM系統,研究結論如下:
1)提出的DPSC策略提高了系統的動態響應,使得系統能更快到達給定位置。
2)設計的ESO能對參數不匹配、負載和逆變器非線性造成的擾動進行觀測,結合提出的補償策略,消除了系統到達給定位置時的振蕩現象,提高了控制精度和動態性能。
通過實驗驗證了本文提出的基于DPSC魯棒性位置伺服永磁電機控制器具有較好的位置跟隨效果和魯棒性。
[1] 付興賀, 江政龍, 呂鴻飛, 等. 電勵磁同步電機無刷勵磁與轉矩密度提升技術發展綜述[J]. 電工技術學報, 2022, 37(7): 1689-1702.
Fu Xinghe, Jiang Zhenglong, Lü Hongfei, et al. Review of the blushless excitation and torque density improvement in wound field synchronous motors[J]. Transactions of China Electrotechnical Society, 2022, 37(7): 1689-1702.
[2] 王一波, 王政, 溫從劍, 等. 多通道三電平風力發電系統協同控制策略研究[J]. 中國電機工程學報, 2019, 39(2): 366-375, 634.
Wang Yibo, Wang Zheng, Wen Congjian, et al. Collaborative control strategies for multi-channel three-level wind energy conversion system[J]. Pro- ceedings of the CSEE, 2019, 39(2): 366-375, 634.
[3] Kazmierkowski M P, Malesani L. Current control techniques for three-phase voltage-source PWM con- verters: a survey[J]. IEEE Transactions on Industrial Electronics, 1998, 45(5): 691-703.
[4] 李祥林, 薛志偉, 閻學雨, 等. 基于電壓矢量快速篩選的永磁同步電機三矢量模型預測轉矩控制[J]. 電工技術學報, 2022, 37(7): 1666-1678.
Li Xianglin, Xue Zhiwei, Yan Xueyu, et al. Voltage vector rapid screening-based three-vector model predictive torque control for permanent magnet syn- chronous motor[J]. Transactions of China Electro- technical Society, 2022, 37(7): 1666-1678.
[5] 郭磊磊, 王朋帥, 李琰琰, 等. 不同代價函數下永磁同步電機模型預測控制參數失配可視化分析[J]. 電工技術學報, 2023, 38(4): 903-914.
Guo Leilei, Wang Pengshuai, Li Yanyan, et al. Visual analysis of parameters mismatch in model predictive control for permanent magnet synchronous motor under different cost functions[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 903-914.
[6] 章回炫, 范濤, 邊元均, 等. 永磁同步電機高性能電流預測控制[J]. 電工技術學報, 2022, 37(17): 4335-4345.
Zhang Huixuan, Fan Tao, Bian Yuanjun, et al. Predictive current control strategy of permanent magnet synchronous motors with high performance[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4335-4345.
[7] 李昱, 郭宏, 平朝春, 等. 基于電流源變流器的永磁同步電機驅動系統全狀態變量預測轉矩控制[J]. 電工技術學報, 2021, 36(1): 15-26.
Li Yu, Guo Hong, Ping Zhaochun, et al. A full-state variable predictive torque control of current source converter fed permanent magnet synchronous motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 15-26.
[8] 谷鑫, 魯金月, 王志強, 等. 基于無差拍電流預測控制的永磁同步電機諧波電流抑制策略[J]. 電工技術學報, 2022, 37(24): 6345-6356.
Gu Xin, Lu Jinyue, Wang Zhiqiang, et al. Harmonic current suppression strategy for permanent magnet synchronous motor based on deadbeat current predi- ction control[J]. Transactions of China Electro- technical Society, 2022, 37(24): 6345-6356.
[9] Gu Minrui, Wang Zheng, Yu Kailiang, et al. Inter- leaved model predictive control for three-level neutral- point-clamped dual three-phase PMSM drives with low switching frequencies[J]. IEEE Transactions on Power Electronics, 2021, 36(10): 11618-11630.
[10] Kawai H, Zhang Zhenbin, Kennel R, et al. Direct speed control based on finite control set model predictive control with voltage smoother[J]. IEEE Transactions on Industrial Electronics, 2023, 70(3): 2363-2372.
[11] Gu Minrui, Wang Zheng, Wen Congjian, et al. Collaborative mid-point voltage regulation in low- switching-frequency MPC for three-level NPC inver- ters fed dual three-phase PMSM drives[J]. IEEE Open Journal of Power Electronics, 2021, 2: 673-682.
[12] Yu Kailiang, Wang Zheng, Hua Wei, et al. Robust cascaded deadbeat predictive control for dual three- phase variable-flux PMSM considering intrinsic delay in speed loop[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 12107-12118.
[13] Yu Kailiang, Wang Zheng. Improved deadbeat predi- ctive current control of dual three-phase variable-flux PMSM drives with composite disturbance observer[J]. IEEE Transactions on Power Electronics, 2022, 37(7): 8310-8321.
[14] Kim H S, Lee K. Model predictive current control with online parameter estimation for synchronous reluctance machine controlled by high-frequency signal injection position-sensorless[J]. IEEE Access, 2022, 10: 25267-25277.
[15] Wang Kang, Lorenz R D, Baloch N A. Enhanced methodology for injection-based real-time parameter estimation to improve back EMF self-sensing in induction machine deadbeat-direct torque and flux control drives[J]. IEEE Transactions on Industry Applications, 2018, 54(6): 6071-6080.
[16] Liu Zhaohua, Wei Hualiang, Li Xiaohua, et al. Global identification of electrical and mechanical parameters in PMSM drive based on dynamic self-learning PSO[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10858-10871.
[17] Zhang Xiaoguang, Cheng Yu, Zhao Zhihao, et al. Robust model predictive direct speed control for SPMSM drives based on full parameter disturbances and load observer[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 8361-8373.
[18] Yang Ming, Lang Xiaoyu, Long Jiang, et al. Flux immunity robust predictive current control with incremental model and extended state observer for PMSM drive[J]. IEEE Transactions on Power Elec- tronics, 2017, 32(12): 9267-9279.
[19] Wang Fengxiang, Ke Dongliang, Yu Xinhong, et al. Enhanced predictive model based deadbeat control for PMSM drives using exponential extended state observer[J]. IEEE Transactions on Industrial Elec- tronics, 2022, 69(3): 2357-2369.
[20] Hu Mingjin, Hua Wei, Wang Zuo, et al. Selective periodic disturbance elimination using extended harmonic state observer for smooth speed control in PMSM drives[J]. IEEE Transactions on Power Electronics, 2022, 37(11): 13288-13298.
[21] Hou Qiankang, Ding Shihong. Finite-time extended state observer-based super-twisting sliding mode controller for PMSM drives with inertia identi- fication[J]. IEEE Transactions on Transportation Electrification, 2022, 8(2): 1918-1929.
[22] Zhang Yongchang, Jin Jialin, Huang Lanlan. Model- free predictive current control of PMSM drives based on extended state observer using ultralocal model[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 993-1003.
Deadbeat Predictive Control for Position Servo Permanent Magnet Motor
(School of Electrical Engineering Southeast University Nanjing 210096 China)
For the predictive control strategy of the permanent magnet synchronous motor position servo system, both model predictive direct speed control (MPDSC) and deadbeat predictive speed control (DPSC) depend on an accurate control system model. However, in practical applications, the motor parameters are changing and challenging to measure, which makes the control performance worse. Moreover, the nonlinearity of the inverter will also affect the prediction accuracy and reduce the performance of the control system. Recently, some methods have been proposed to solve the issues of parameter inaccuracy, but most are computationally expensive and hard to implement in practice. This paper proposes a robust deadbeat predictive speed control (R-DPSC) strategy to improve the control performance of the permanent magnet synchronous motor position servo system by incorporating the deadbeat control and the disturbance observer.
Firstly, according to the mathematical model of PMSM in the synchronous coordinate frame and the deadbeat control principle, the current and speed loops are designed for the servo drive. A proportional controller is used to design the position loop. Then, according to the discrete-state model of the motor, the reference voltages are predicted and converted into the switching signals of the inverter by space vector pulse-width modulation (SVPWM). In this paper, the incremental model is adopted to predict the current without the permanent-magnet flux value, and an extended state observer (ESO) is designed with the incremental model to estimate and compensate for the prediction errors caused by inaccurate parameters and load disturbance. The R-DPSC strategy combined with ESO can accurately track the desired position in the case of inaccurate parameters and external disturbance in load. In order to reduce the oscillation caused by the observer when the system approaches the given position reference, a prediction error compensation method is proposed, which uses different compensation quantities according to different working states of the system. The R-DPSC strategy with prediction error compensation method (PR-DPSC) can improve the robustness of the system and maintain the good dynamic performance of the DPSC strategy. Thus, the system can achieve better position-tracking performance.
The experimental results show that when the control parameters and the load torque settings do not match the actual values, the position tracking error is eliminated by the R-DPSC strategy. After adopting the PR-DPSC strategy, the position tracking error can be eliminated, and the oscillation phenomenon disappears when the actual position is close to the given position. Furthermore, the time for the system to reach the given position is reduced. Under the same experimental conditions, comparative experiments were carried out for different control schemes, which proved that the PR-DPSC strategy has faster position tracking speed and better anti-disturbance performance.
The research conclusions are as follows: (1) The proposed DPSC strategy improves the dynamic response of the system, enabling the system to reach a given position faster; (2) The designed ESO can observe the disturbance caused by parameter mismatch, load, and inverter nonlinearity. The proposed compensation strategy eliminates the oscillation phenomenon when the system reaches a given position, and the control accuracy and dynamic performance are improved.
Position servo system, deadbeat predictive speed control, extended state observer, compensation strategy
10.19595/j.cnki.1000-6753.tces.221921
TM383.4
2022-10-09
2023-03-24
王 政 男,1979年生,教授,博士生導師,研究方向為電機驅動及控制、新能源與分布式發電。E-mail: zwang@seu.edu.cn(通信作者)
溫從劍 男,1995年生,碩士研究生,研究方向為電機驅動及控制。E-mail: wcj19951026@163.com
(編輯 崔文靜)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
裝備制造技術(2019年12期)2019-12-25 03:06:46
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
數學大世界(2018年1期)2018-04-12 05:39:14
