一種基于GO法的多態(tài)反饋系統(tǒng)選擇性維修模型
2023-10-12 02:29:00溫軼群,段富海
大連理工大學(xué)學(xué)報 2023年5期
溫 軼 群, 段 富 海
(大連理工大學(xué) 機械工程學(xué)院,遼寧 大連 116024 )
0 引 言
現(xiàn)代戰(zhàn)爭是時間的戰(zhàn)爭,飛機作為快速奪取制空權(quán)、建立有利戰(zhàn)場態(tài)勢的最佳手段,其作用不言而喻.戰(zhàn)場環(huán)境分秒必爭,為使飛機能夠在最短時間實現(xiàn)再次出動,需要對飛機進行選擇性維修.如何在最短時間對飛機進行選擇性維修,同時保證裝備具有較高的可靠性,并確保維修費用在合理的范圍內(nèi),是值得探討的熱門問題.
選擇性維修決策主要是對維修對象和維修行為進行優(yōu)化選擇,根據(jù)不同的任務(wù)需求,建立相應(yīng)的選擇性維修模型.Rice等[1]于1998年第一次提出選擇性維修的概念,在考慮時間、費用、人員和備件等有限維修資源的約束下,根據(jù)任務(wù)需求,確定目標函數(shù),從而建立選擇性維修模型進行優(yōu)化求解.自選擇性維修概念提出以來,國內(nèi)外許多學(xué)者對其展開了深入的研究.Bris等[2]以費用最小化為目標函數(shù),將系統(tǒng)可靠度控制在閾值之內(nèi),建立選擇性維修模型;Laggoune等[3]和Wang等[4]根據(jù)Bris等建立的選擇性維修模型,采用不同求解算法進行優(yōu)化;曹文斌等[5]假設(shè)部件維修后,其狀態(tài)分布服從馬爾可夫模型得出狀態(tài)轉(zhuǎn)移函數(shù),并根據(jù)不同的任務(wù)需求,考慮維修費用、時間和系統(tǒng)可靠度等因素,建立相應(yīng)的選擇性維修模型;進一步地,曹文斌等[6]考慮多態(tài)反饋系統(tǒng)存在的共因失效問題,提出了一種模糊多態(tài)反饋系統(tǒng)選擇性維修模型;王少華等[7]考慮在有限任務(wù)間隔時間的約束條件下,以最小維修、預(yù)防更換和事后更換為維修方案,以任務(wù)可靠度為目標函數(shù),建立復(fù)雜串并聯(lián)系統(tǒng)的選擇性維修模型;陳兆芳等[8]考慮電梯系統(tǒng)可靠度、有效役齡以及維修費用和時間等因素,建立選擇性維修模型,并運用粒子群優(yōu)化算法進行優(yōu)化求解;Pandey等[9]考慮役齡回退因子對元件役齡的影響,建立了以系統(tǒng)可靠度為目標函數(shù)、以維修費用和時間為約束條件的選擇性維修模型;史海慶等[10]利用貝葉斯公式求出飛機處于各役齡完成下次任務(wù)的概率,構(gòu)建未知役齡軍用飛機的選擇性維修模型,并利用遺傳算法進行優(yōu)化求解;王海朋等[11]考慮多維修人員對復(fù)雜系統(tǒng)進行不完全維修,建立選擇性維修模型,并用粒子群優(yōu)化算法進行求解.上述研究均取得了較好的成果,但在系統(tǒng)可靠度的研究上還需優(yōu)化,且大多數(shù)文獻采用可靠性框圖法對串并聯(lián)系統(tǒng)進行建模,未考慮反饋回路對系統(tǒng)可靠度的影響.
本文假設(shè)多態(tài)反饋系統(tǒng)各元件失效概率與時間的關(guān)系均服從韋布爾分布,以某一閾值為失效臨界點,將元件正常狀態(tài)的時間段按照元件的kij+1種性能狀態(tài)等分為kij個時間段,并取時間段中可靠度的上界作為元件在某一狀態(tài)的可靠度,運用GO法分析整個系統(tǒng)正常運行的可靠度;根據(jù)不同的維修行為推導(dǎo)得出各種維修方案所需的維修費用和時間;以時間最小化為目標函數(shù),以維修后系統(tǒng)可靠度和維修費用為約束條件,建立選擇性維修模型;最后采用粒子群優(yōu)化算法對構(gòu)造的選擇性維修模型進行求解.
1 問題描述
1.1 假設(shè)分析
假設(shè)多態(tài)反饋系統(tǒng)由M個相互獨立的子系統(tǒng)組成(M=1,2,…,m),每個子系統(tǒng)由N個相互獨立的元件組成(N=1,2,…,n).元件Eij有kij+1種性能狀態(tài),其所處各性能狀態(tài)可表示為gij={0,1,…,kij},其中0表示元件處于故障狀態(tài);1表示元件處于到達額定使用壽命的臨界狀態(tài);2,…,kij-1表示故障與完好之間的多中間狀態(tài);kij表示完好狀態(tài).元件Eij處于各性能狀態(tài)的可靠度可表示為rij={rij(0),rij(1),…,rij(kij)}.
假設(shè)系統(tǒng)所有元件在其全壽命周期中,其失效概率與時間t的關(guān)系均服從韋布爾分布,則元件Eij在時間t的可靠度rij可表示為
rij(t)=exp[-(t/ηij)βij]
(1)
其中ηij和βij分別表示元件Eij服從韋布爾分布的尺度參數(shù)和形狀參數(shù).
元件在服役過程中,其性能狀態(tài)隨著時間不斷退化,可靠度不斷下降.當(dāng)元件Eij處于故障狀態(tài)或可靠度下降至閾值ω0(即元件到達額定使用壽命)時,為保證整個系統(tǒng)正常運行,并處于較高的可靠性水平,根據(jù)工程實際,需要對元件Eij進行更換.
由于元件在不同時間處于不同的性能狀態(tài),將元件Eij在可靠度下降至閾值ω0前的時間長度L(t)離散化,根據(jù)元件Eij的kij+1種性能狀態(tài),將L(t)等分為kij個時間段,每個時間段長度為L(t)/kij,取每個時間段可靠度的上界作為該狀態(tài)的可靠度[10].元件各性能狀態(tài)對應(yīng)的韋布爾分布圖如圖1所示.
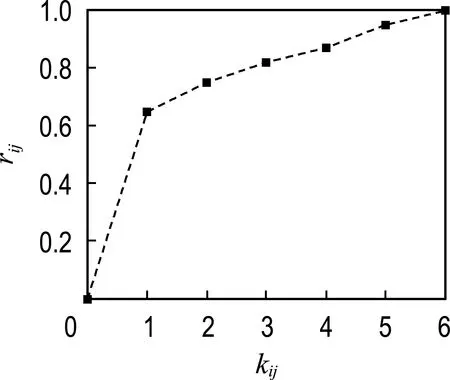
圖1 元件各性能狀態(tài)對應(yīng)的韋布爾分布圖
韋布爾分布中,t=L(t)(kij-gij)/kij,代入式(1),可得元件Eij處于全部kij種性能狀態(tài)(即gij={1,2,…,kij})時所對應(yīng)的可靠度:
rij(gij)=exp[(-L(t)(kij-gij)/kijηij)βij]
(2)
1.2 系統(tǒng)可靠性分析
系統(tǒng)可靠性分析方法主要有可靠性框圖法、故障樹法、GO法等[12],其中故障樹法使用時間最長,發(fā)展也相對完善,但其對復(fù)雜系統(tǒng)的分析有較多的難點,特別是對多狀態(tài)、有時序、有信號反饋等復(fù)雜系統(tǒng)的可靠性分析尤其困難,而GO法卻能有效解決以上問題.
GO法是一種有效的多態(tài)復(fù)雜系統(tǒng)可靠性分析方法,首先,根據(jù)系統(tǒng)各元件特點匹配相應(yīng)的操作符,然后分析系統(tǒng)結(jié)構(gòu)和工作原理,構(gòu)建系統(tǒng)GO圖;其次,基于其操作符相關(guān)運算規(guī)則,遵循特定的信號流序列,對每個操作符逐步進行運算,完成系統(tǒng)各狀態(tài)的概率計算;最后,可獲得系統(tǒng)成功運行的精確概率[13].
2 維修行為、費用和時間
為方便研究的開展,這里作以下假設(shè):
(1)維修行為只發(fā)生在任務(wù)間隔期,任務(wù)過程中不進行維修;
(2)系統(tǒng)各元件的可靠性均服從韋布爾分布;
(3)系統(tǒng)在任務(wù)結(jié)束時,各元件的性能狀態(tài)已知;
(4)各元件的維修行為可以使元件的性能狀態(tài)修復(fù)至更好狀態(tài);
(5)僅考慮維修行為所需的費用和時間這兩類維修資源,人員、備件等其他資源充足.
2.1 維修行為
已知任務(wù)結(jié)束時,元件Eij性能狀態(tài)為Xij,若對元件Eij進行維修,維修行為記作lXij,Yij,維修后元件Eij的性能狀態(tài)為Yij,維修所需的費用和時間分別記作cXij,Yij、tXij,Yij.Xij∈{0,1,…,kij},Yij∈{2,3,…,kij},且Yij≥Xij.
當(dāng)Xij∈{0,1}時,為節(jié)省維修時間并確保系統(tǒng)處于較高的可靠度,需要對元件Eij進行更換,這樣更符合工程實際,且更換后Yij=kij,其維修行為對應(yīng)的性能狀態(tài)轉(zhuǎn)移圖如圖2所示.

圖2 更換維修行為對應(yīng)的性能狀態(tài)轉(zhuǎn)移圖
當(dāng)Xij∈{2,3,…,kij}時,可選擇不修、更換、不完美維修等維修方案,各維修行為對應(yīng)的性能狀態(tài)轉(zhuǎn)移圖如圖3所示.
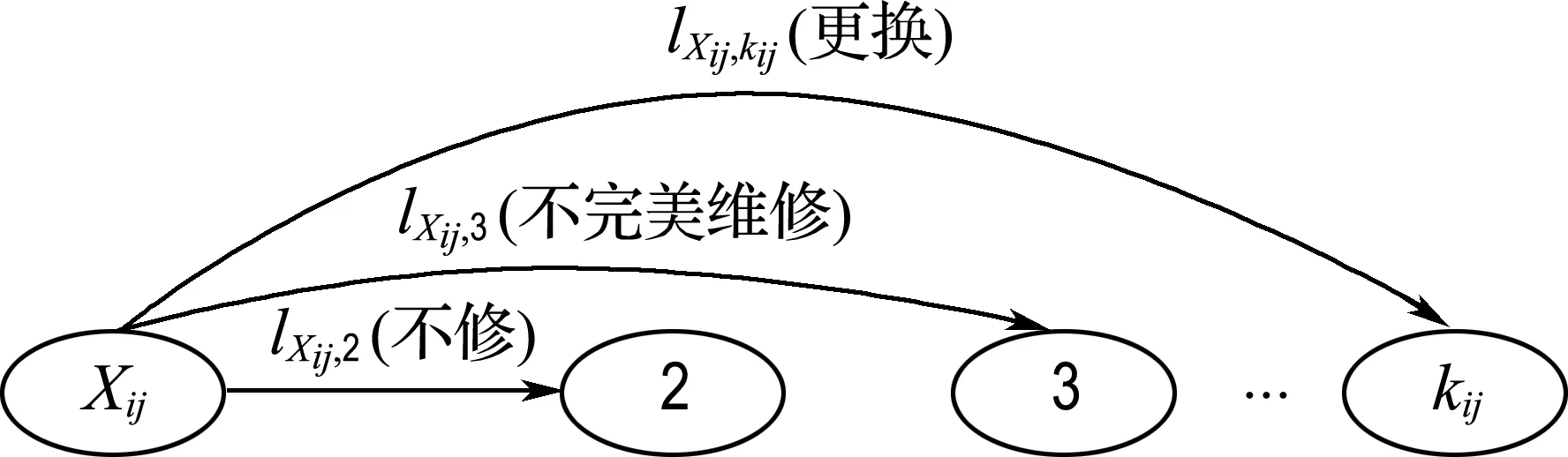
圖3 各維修行為對應(yīng)的性能狀態(tài)轉(zhuǎn)移圖
當(dāng)Yij=Xij時,表示不對元件Eij進行維修;當(dāng)Yij=kij時,表示對元件Eij進行更換;當(dāng)Yij>Xij時,表示對元件Eij進行不完美維修.
2.2 維修費用和時間
元件Eij維修前的性能狀態(tài)為Xij,維修后的性能狀態(tài)為Yij,對于維修方案lXij,Yij,若Yij越大,則表示維修的水平越高,消耗的費用越多.
當(dāng)Xij∈{0,1}時,Yij=kij,需要對元件Eij進行更換,則維修費用的表達式為
(3)
當(dāng)Xij∈{2,3,…,kij-1}時,若Yij=Xij,表示不對元件Eij進行維修;若Yij>Xij,表示對元件Eij進行不完美維修;若Yij=kij,表示對元件Eij進行更換.相應(yīng)的維修費用表達式為
(4)

當(dāng)Xij=kij時,Yij=kij,表示不對元件Eij進行維修,則維修費用的表達式為
cXij,Yij=0
(5)
系統(tǒng)總維修費用為
(6)
同理,當(dāng)Xij∈{0,1}時,對元件Eij進行更換,維修消耗的時間只有拆裝元件等固定時間,則維修時間的表達式為
(7)
當(dāng)Xij∈{2,3,…,kij-1}時,元件Eij的維修方案為不修、不完美維修、更換,維修時間的表達式為
(8)

當(dāng)Xij=kij時,Yij=kij,表示不對元件Eij進行維修,則維修時間的表達式為
tXij,Yij=0
(9)
假設(shè)人員充足,維修設(shè)備狀態(tài)良好,所有元件同時進行維修,則系統(tǒng)總維修時間Ts為系統(tǒng)各元件維修時間中的最大值:
Ts=max(tXij,Yij)
(10)
3 多態(tài)反饋系統(tǒng)選擇性維修模型
3.1 選擇性維修模型
在有限維修資源條件下,如何提高飛機的可用性,讓其能夠在最短時間實現(xiàn)再次出動,占據(jù)戰(zhàn)場優(yōu)勢,對戰(zhàn)爭的發(fā)展尤為重要.
本文以維修時間最小化為目標函數(shù),考慮不同維修行為對系統(tǒng)各元件性能狀態(tài)的影響,以系統(tǒng)成功運行的可靠度和維修費用為約束條件,建立選擇性維修模型.
目標函數(shù):
minTs=min(max(tXij,Yij))
(11)
約束條件:
Cs≤C0
(12)
Ps≥ωs
(13)
目標函數(shù)(11)表示系統(tǒng)維修時間最小化;約束條件(12)表示系統(tǒng)總維修費用小于或等于預(yù)算費用;約束條件(13)表示維修后系統(tǒng)的可靠度大于或等于系統(tǒng)正常運行的最低要求.
3.2 選擇性維修決策優(yōu)化
針對3.1節(jié)建立的優(yōu)化模型,當(dāng)元件的性能狀態(tài)較少時,可以采用枚舉法等進行優(yōu)化求解,但隨著元件性能狀態(tài)的增加,解空間出現(xiàn)空間爆炸,求解難度過大[14].粒子群優(yōu)化算法是模擬鳥群捕食行為特點,對當(dāng)前搜索的最優(yōu)解進行迭代,從而尋找全局最優(yōu)解的智能算法,具有操作簡捷、收斂速度快等特點[15],因此本文采用粒子群優(yōu)化算法進行求解.
3.2.1 粒子群優(yōu)化算法 多態(tài)反饋系統(tǒng)選擇性維修決策問題用粒子群優(yōu)化算法可以描述如下:假設(shè)一個D維空間由粒子容量為N的種群Y組成,Y=(Y1…Yz…YN),粒子Yz可表示為D維向量Yz=(Yz1…Yzd…YzD),Yz代表系統(tǒng)的一個潛在維修方案,同時也是所求模型的一個潛在解,其中Yzd代表系統(tǒng)某一元件進行選擇性維修后的性能狀態(tài),Yzd越大,代表維修的水平越高,且2≤Yzd≤kij.每個Yz都對應(yīng)一個與模型相關(guān)的適應(yīng)度函數(shù)值.粒子通過有限次的迭代尋找最優(yōu)解,在每次迭代中,粒子通過跟蹤其歷史個體極值Pz(w)和所經(jīng)歷的適應(yīng)值最好位置Pg(w)更新自己,最終收斂于全局的最優(yōu)位置.其中,Pz(w)=(Pz1(w)…Pzd(w)…PzD(w)),Pg(w)=(Pg1(w) …Pgd(w) …PgD(w)),Pg(w)即為系統(tǒng)選擇性維修模型的最優(yōu)方案.在第w次迭代時,各粒子的位置可以表示為Pz(w)=(Pz1(w)…Pzd(w)…PzD(w)),Pzd(w)∈[2,kij];各粒子的運動速度可以表示為vz(w)=(vz1(w) …vzd(w) …vzD(w)),其中vzd(w)∈[vmin,vmax];在找到Pz和Pg前,粒子根據(jù)式(14)、(15)更新自己的速度和位置:
vzd(w+1)=vzd(w)+c1r1(Pzd(w)-Yzd(w))+
c2r2(Pgd(w)-Yzd(w))
(14)
Pzd(w+1)=Pzd(w)+vzd(w+1)
(15)
式中:w為迭代步數(shù),c1、c2為學(xué)習(xí)因子,r1、r2為[0,1]內(nèi)的隨機數(shù).
3.2.2 算法流程 算法流程步驟如下:
步驟1初始化粒子種群,設(shè)定種群規(guī)模為N、迭代步數(shù)為w,學(xué)習(xí)因子為c1、c2;設(shè)置各項參數(shù),包括元件數(shù)量和維修前各元件的性能狀態(tài).
步驟2計算各粒子的適應(yīng)度函數(shù)值.
步驟3更新粒子的速度和位置,找到對應(yīng)各元件的性能狀態(tài)Yzd,計算系統(tǒng)成功運行的可靠度Ps,得出各元件實施以上維修方案所需維修費用矩陣為(c11c12…c1nc21c22…cij…cmn),其中cij為元件Eij的維修費用,由式(6)計算出系統(tǒng)總維修費用Cs.
步驟4判斷進化后的粒子是否滿足約束條件.若滿足,則更新粒子的性能狀態(tài),重新計算進化后粒子的適應(yīng)度函數(shù)值,執(zhí)行步驟5;若不滿足,則轉(zhuǎn)至步驟3.
步驟5更新粒子的歷史個體極值和所經(jīng)歷的適應(yīng)值最好位置.
步驟6更新粒子群的歷史個體極值和所經(jīng)歷的適應(yīng)值最好位置.
步驟7判斷是否滿足終止條件:若迭代步數(shù)小于w,則轉(zhuǎn)至步驟3;否則輸出最優(yōu)的決策方案.
4 案例分析
某艦載機折疊翼控制系統(tǒng)原理圖[16]如圖4所示.假設(shè)系統(tǒng)各元件的失效概率與時間的關(guān)系均服從韋布爾分布,根據(jù)式(2)及各元件服從韋布爾分布的尺度參數(shù)和形狀參數(shù),可計算出各元件在不同性能狀態(tài)下的可靠度,見表1.

表1 各元件性能狀態(tài)及可靠度

圖4 艦載機折疊翼控制系統(tǒng)原理圖
根據(jù)GO法原理,結(jié)合17類操作符特點,按照信號流的序列,構(gòu)建系統(tǒng)GO圖,如圖5所示,其中圖形內(nèi)前后的數(shù)字分別表示操作符類型和編號,箭頭表示信號的流向,箭頭上的數(shù)字表示信號流的序號.各操作符所代表的操作符編號和類型等見表2.
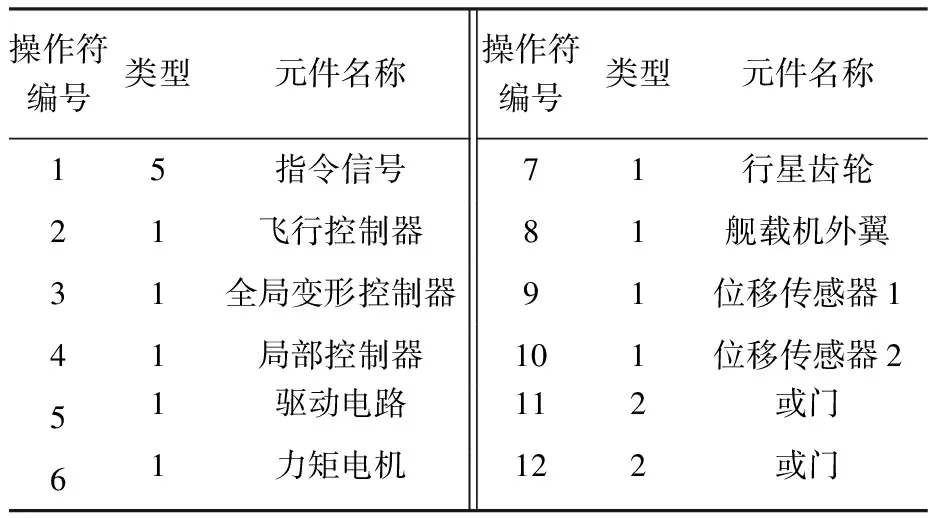
表2 艦載機折疊翼控制系統(tǒng)操作符數(shù)據(jù)
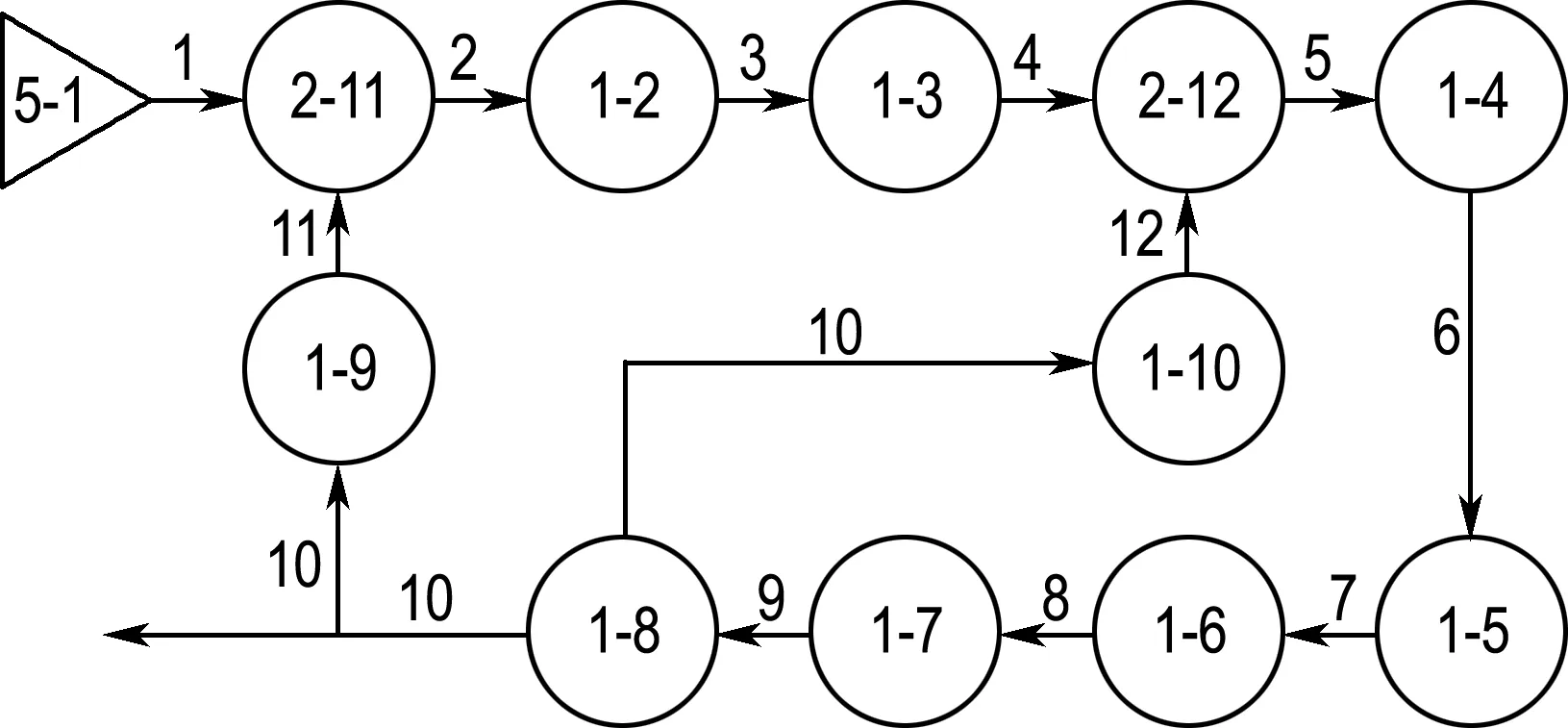
圖5 艦載機折疊翼控制系統(tǒng)GO圖
圖5中,信號流10為反饋信號,假設(shè)各元件的布爾變量為Ci,信號流的布爾變量為Si,則關(guān)鍵信號流對應(yīng)的布爾方程如下:
(1)信號流2
S2=1-(1-C1)(1-S10C9)
(16)
(2)信號流4
S4=S2C2C3
(17)
(3)信號流10
S10=C4C5C6C7C8[1-(1-S4)(1-S10C10)]
(18)
將式(16)、(17)代入式(18)中,整理得
S10=S10{C4C5C6C7C8[C2C3(C9-C1C9-
C1C10-C9C10+C1C9C10)+C10]}+
C1C2C3C4C5C6C7C8
(19)
根據(jù)布爾方程X=μX+β,解得X=μ+β或X=β,可得
S10=C4C5C6C7C8[C2C3(C9-C1C9-
C1C10-C9C10+C1C9C10)+C10]+
C1C2C3C4C5C6C7C8
(20)
S′10=C1C2C3C4C5C6C7C8
(21)
因為系統(tǒng)的可靠性是指其成功運行概率的最大值[17],所以式(20)滿足條件,換算成相應(yīng)的概率為
PS10=PC4PC5PC6PC7PC8[PC2PC3(PC9-
PC1PC9-PC1PC10-PC9PC10+
PC1PC9PC10)+PC10]+
PC1PC2PC3PC4PC5PC6PC7PC8
(22)
若不考慮反饋回路,直接斷開反饋回路進行定量計算,則關(guān)鍵信號流的計算過程如下:
(1)信號流2
PS2=1-(1-PC1)(1-PC9)
(23)
(2)信號流4
PS4=PS2PC2PC3
(24)
(3)信號流5
PS5=1-(1-PS4)(1-PC10)
(25)
(4)信號流10
PS10=PS5PC4PC5PC6PC7PC8
(26)
將式(23)~(25)代入式(26)中,整理得
PS10=PC2PC3(PC1+PC9-PC1PC9)(1-PC10)+PC10
(27)
假設(shè)該系統(tǒng)完成上一任務(wù)后,各元件的性能狀態(tài)已知,各元件可靠度閾值ω0=0.65,系統(tǒng)可靠度閾值ωs=0.89,系統(tǒng)維修費用的約束值C0=6.5×105元.完成上一任務(wù)后,系統(tǒng)各元件的性能狀態(tài)及對應(yīng)的可靠度見表3.

表3 完成上一任務(wù)后,各元件性能狀態(tài)及可靠度
將表3數(shù)據(jù)代入式(22)中,得出上一任務(wù)完成后,系統(tǒng)正常運行的可靠度Ps=0.434 612,低于系統(tǒng)可靠度閾值ωs=0.89,影響下一任務(wù)的正常實施,所以需要對系統(tǒng)進行選擇性維修.
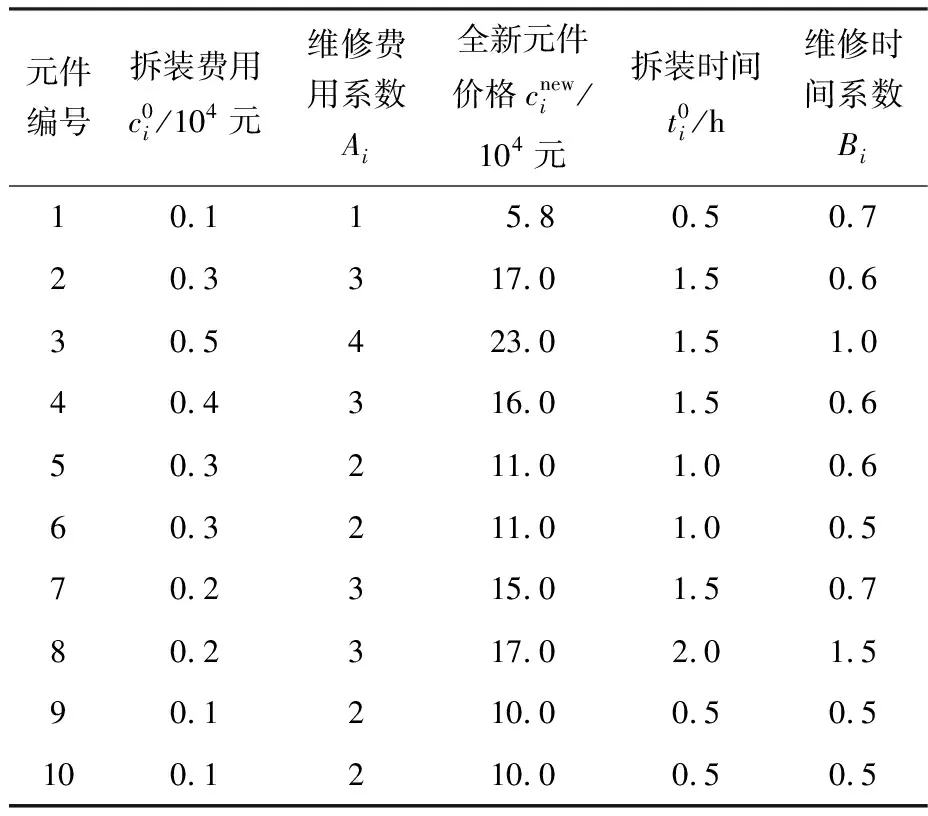
表4 各元件維修參數(shù)
分別以式(22)、(27)作為可靠度約束條件,將表4數(shù)據(jù)代入建立的選擇性維修模型(11)~(13),運用粒子群優(yōu)化算法進行求解,結(jié)果見表5.

表5 選擇性維修方案
由表5可知,當(dāng)考慮反饋時,系統(tǒng)總維修費用為6.3×105元,總維修時間為5 h,維修后的可靠度為0.900 572;不考慮反饋時,系統(tǒng)總維修費用為3.36×105元,總維修時間為1.5 h,維修后的可靠度為0.995 154.將考慮反饋與不考慮反饋所得結(jié)果進行對比,誤差較大.當(dāng)系統(tǒng)的邏輯連接關(guān)系改變后,系統(tǒng)的可靠性分析結(jié)果也會有一定誤差,同時也驗證了直接斷開反饋回路降低了系統(tǒng)可靠性分析的可信度,從而驗證了本文考慮系統(tǒng)反饋回路建立的選擇性維修模型及優(yōu)化算法可信度更高.
5 結(jié) 論
(1)本文提出一種針對多態(tài)反饋系統(tǒng)的選擇性維修模型,根據(jù)元件可靠度隨服役時間的變化,以某一可靠度閾值為有效臨界點,將閾值范圍內(nèi)的時間長度進行等分,對應(yīng)不同的性能狀態(tài).對不同的性能狀態(tài)考慮不修、更換和不完美維修等維修方案,更加符合工程實際.
(2)相比于可靠性框圖法,運用GO法對系統(tǒng)可靠性進行分析,不僅可以有效解決反饋回路對系統(tǒng)可靠性的影響,而且對于多狀態(tài)、有時序復(fù)雜系統(tǒng)的可靠性評估更加準確有效.
(3)以某艦載機折疊翼控制系統(tǒng)為例,驗證了所提模型和優(yōu)化算法切實有效可行,能夠為多態(tài)反饋系統(tǒng)提供一種行之有效的選擇性維修決策方案.
猜你喜歡
時代英語·高一(2024年3期)2024-04-29 00:00:00
第一財經(jīng)(2019年8期)2019-08-26 17:53:46
測控技術(shù)(2018年10期)2018-11-25 09:35:54
浙江工業(yè)大學(xué)學(xué)報(2017年5期)2018-01-22 02:03:46
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年2期)2016-05-17 05:34:16
哈爾濱醫(yī)藥(2015年2期)2015-12-01 03:57:13
學(xué)習(xí)月刊(2015年14期)2015-07-09 03:37:48
電子工業(yè)專用設(shè)備(2015年4期)2015-05-26 09:10:40
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:33:01
無機化學(xué)學(xué)報(2014年3期)2014-02-28 17:30:48