基于神經(jīng)網(wǎng)絡的船舶穩(wěn)性預報研究
2023-10-12 02:29:02蔣柴丞,李楷,馬坤
大連理工大學學報 2023年5期
關鍵詞:船舶
蔣 柴 丞, 李 楷, 馬 坤
(大連理工大學 船舶工程學院,遼寧 大連 116024 )
0 引 言
目前,國際海事組織針對第二代完整穩(wěn)性中5種失效模式的計算方法已基本確定.第一層薄弱性衡準評估雖然計算簡便,但計算精度不足;第三層直接穩(wěn)性評估雖然計算精度高,但需要實驗且計算過程非常煩瑣;第二層薄弱性衡準選擇的數(shù)學模型概率方法,在保持精度的同時,計算過程的復雜程度有所降低,但因需要計算橫搖阻尼以及船舶阻力等參數(shù),耗時仍然較長.
神經(jīng)網(wǎng)絡廣泛應用于船舶快速性、耐波性、操縱性預報,以及船舶識別、船舶定位等領域[1-3].Yang等采用徑向基函數(shù)(RBF)神經(jīng)網(wǎng)絡對集裝箱船進行阻力預報,并與反向傳播(BP)神經(jīng)網(wǎng)絡、支持向量機、隨機森林等的預測結果進行對比[4].李占英系統(tǒng)比較了BP神經(jīng)網(wǎng)絡、RBF神經(jīng)網(wǎng)絡、對角遞歸網(wǎng)絡(DRNN)、回聲狀態(tài)網(wǎng)絡(ESN)等算法對船舶橫搖運動的預報,并提出了組合預報方法,在預報精度上有較大提高[5].神經(jīng)網(wǎng)絡同時也大量應用于船舶柴油機故障診斷中[6-7].而船舶穩(wěn)性方面,國內外大量學者主要針對第二代完整穩(wěn)性的應用進行研究[8].
目前,采用神經(jīng)網(wǎng)絡對船舶穩(wěn)性進行預報的相關研究尚有大量空白.因此本文選擇RBF神經(jīng)網(wǎng)絡對船舶過度加速度失效模式、癱船穩(wěn)性失效模式以及騎浪/橫甩失效模式的失效概率進行預報,并通過研究船舶相關參數(shù)對各失效模式的影響來確定網(wǎng)絡輸入特征,從而減少計算復雜度,在保證精度的情況下對船舶穩(wěn)性進行預報,以便省略船舶穩(wěn)性計算中橫搖阻尼以及船舶阻力等參數(shù)的復雜計算過程.
1 預報方法
1.1 RBF神經(jīng)網(wǎng)絡結構
RBF神經(jīng)網(wǎng)絡可用來解決多維擬合問題,能夠逼近任意非線性函數(shù),可以處理系統(tǒng)內難以解析的規(guī)律性問題,具有良好的泛化能力和較快的學習收斂速度,已成功應用于非線性函數(shù)逼近、時間序列分析、數(shù)據(jù)分類、信息處理、系統(tǒng)建模等領域.
RBF神經(jīng)網(wǎng)絡是一種前向三層神經(jīng)網(wǎng)絡.在前向傳遞過程中,信號由輸入層進入網(wǎng)絡,經(jīng)過隱藏層徑向基函數(shù)處理,而后通過對各隱藏層結果進行線性組合得到網(wǎng)絡輸出.RBF神經(jīng)網(wǎng)絡結構如圖1所示.
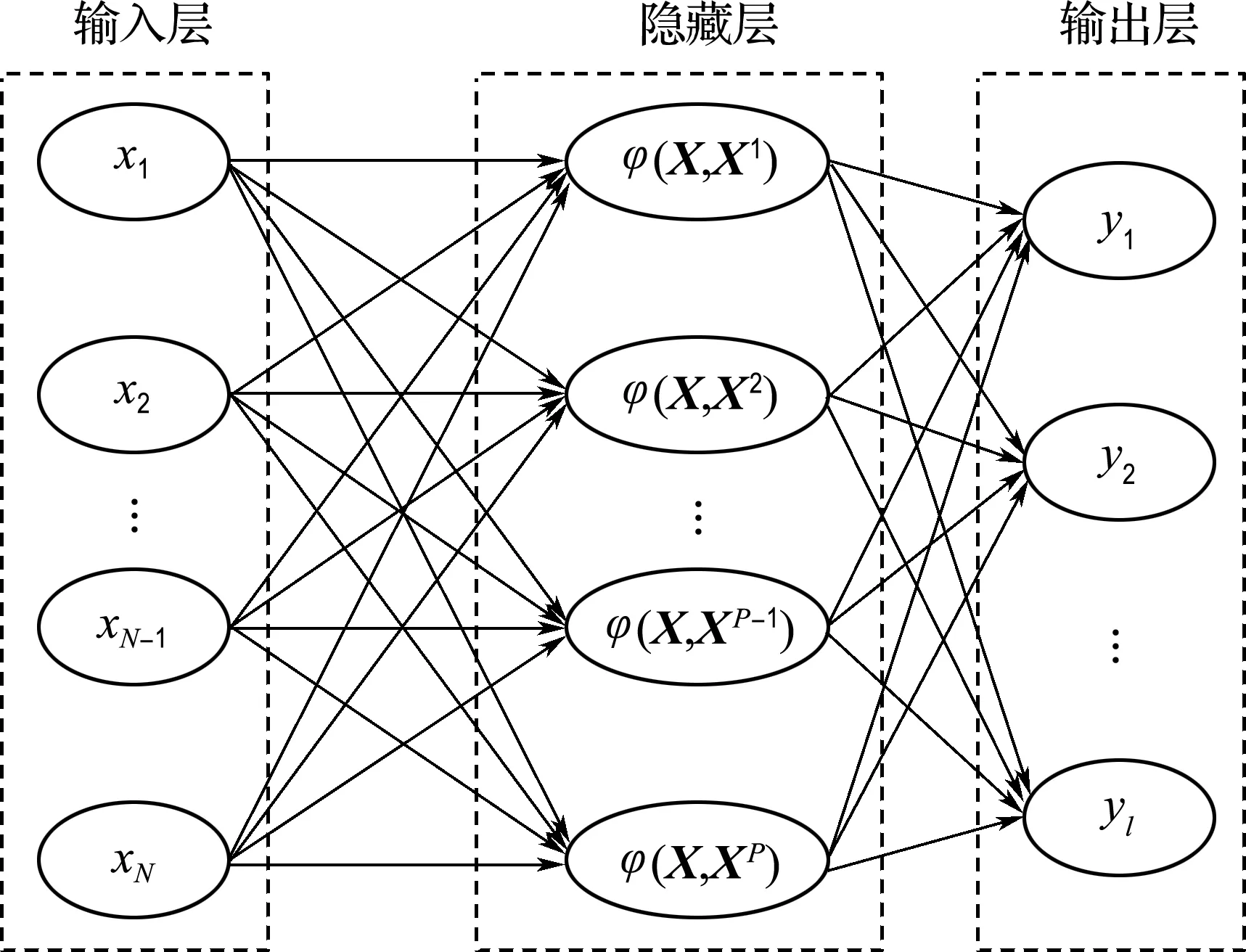
圖1 RBF神經(jīng)網(wǎng)絡結構
圖1中,x1,x2,…,xN是RBF神經(jīng)網(wǎng)絡的輸入值,y1,y2,…,yl是RBF神經(jīng)網(wǎng)絡的預測值,N和l分別為輸入層和輸出層節(jié)點個數(shù),X1,X2,…,XP是隱藏層節(jié)點的數(shù)據(jù)中心,P為隱藏層節(jié)點個數(shù).
1.2 網(wǎng)絡輸出計算
RBF神經(jīng)網(wǎng)絡的隱藏層節(jié)點輸出值通過徑向基函數(shù)獲得.對于一組特征向量X=(x1x2…
xN),隱藏層節(jié)點輸出值的計算公式如下:
(1)
式中:hp為第p個隱藏層節(jié)點的輸出值,φ為徑向基函數(shù),Xp為第p個隱藏層節(jié)點的數(shù)據(jù)中心.本研究采用高斯函數(shù)作為徑向基函數(shù),其計算公式如下:
(2)
式中:r為特征向量到數(shù)據(jù)中心的距離,δ為擴展常數(shù).因此RBF神經(jīng)網(wǎng)絡輸出值計算公式如下:
(3)
其中ωp為第p個隱藏層節(jié)點對輸出層節(jié)點的權重.
1.3 輸入特征選取
神經(jīng)網(wǎng)絡輸入層節(jié)點個數(shù)的選取一般由研究者自己確定.作者所在課題組長期研究船舶相關參數(shù)對第二代完整穩(wěn)性中各個失效模式的影響[9],參數(shù)包括船長、船寬、型深、吃水、方形系數(shù)、中橫剖面系數(shù)、水線面系數(shù)、重心高度等.
根據(jù)作者所在課題組得到的相關研究結果,選擇其中對各失效模式有明顯影響的船舶相關參數(shù)作為各預報網(wǎng)絡的輸入特征,并以此確定輸入層節(jié)點個數(shù).使用該方法可避免將過多的不相關參數(shù)作為網(wǎng)絡的輸入特征,導致確定隱藏層節(jié)點數(shù)據(jù)中心的復雜度上升,在耗時更長的同時卻沒能減小預報誤差以及提高預報精度.
1.4 網(wǎng)絡參數(shù)修正
修正RBF神經(jīng)網(wǎng)絡參數(shù)的目的,是為了使網(wǎng)絡輸出結果不斷接近真實值,從而減小預測值與期望值之間的誤差.目前,常用的RBF神經(jīng)網(wǎng)絡參數(shù)修正方法有兩種:通過無監(jiān)督學習算法得到隱藏層節(jié)點的數(shù)據(jù)中心和方差,通過監(jiān)督學習算法獲得隱藏層到輸出層的權重;采用監(jiān)督學習算法對網(wǎng)絡所有參數(shù)(隱藏層節(jié)點的數(shù)據(jù)中心、方差和隱藏層到輸出層的權重)進行訓練,對代價函數(shù)(均方誤差MSE)進行梯度下降,然后修正每個參數(shù).
本研究采用BP算法,根據(jù)每個樣本預測值與期望值之間的誤差ei進行逐次修正,誤差ei的計算公式如下:
ei=F(X)′-F(X)
(4)
其中F(X)′為網(wǎng)絡的期望輸出.
此時定義訓練目標函數(shù)為M組輸入-輸出對的均方誤差,計算公式如下:
(5)
根據(jù)預測誤差修正網(wǎng)絡權重和參數(shù),同時為加快算法收斂速度,避免算法陷入局部最小值,引入學習速率,計算公式如下:
(6)
式中:η為學習速率,c為數(shù)據(jù)中心.
1.5 預測誤差評估
為了反映訓練后網(wǎng)絡預測的準確性,采用均方誤差(ems)和平均絕對百分比誤差(MAPE,emap)對預測結果進行誤差分析,計算公式如下:
(7)
式中:d為預測樣本數(shù)量,一般認定平均絕對百分比誤差小于10%時預測效果良好[10].
1.6 算法實現(xiàn)流程
根據(jù)上述計算理論以及計算公式,采用C++編程語言開發(fā)RBF神經(jīng)網(wǎng)絡,算法流程如圖2所示.

圖2 RBF神經(jīng)網(wǎng)絡算法流程圖
2 網(wǎng)絡輸入特征以及訓練樣本
2.1 各失效模式輸入特征確定
作者所在課題組不斷研究船舶相關參數(shù)對第二代完整穩(wěn)性中各失效模式的影響,其中船舶主尺度參數(shù)包括船長、船寬、型深以及吃水,船體形狀參數(shù)包括方形系數(shù)、水線面系數(shù)以及中橫剖面系數(shù),載重參數(shù)包括重心高度.
在研究過程中發(fā)現(xiàn),船長和型深變化對過度加速度失效模式長期失效概率的計算結果幾乎不產(chǎn)生影響.因此,本研究選擇船寬、吃水、重心高度、方形系數(shù)、水線面系數(shù)以及中橫剖面系數(shù)作為預報該失效模式失效概率的網(wǎng)絡輸入數(shù)據(jù),即輸入層節(jié)點個數(shù)為6.輸出層節(jié)點個數(shù)為1,代表過度加速度長期失效概率預報結果.
針對癱船穩(wěn)性失效模式,除了上述船舶相關參數(shù),所在課題組還同時加入了進水角對傾覆概率的影響研究.在研究過程中發(fā)現(xiàn),船長變化對計算結果幾乎無影響.因此,本研究選擇船寬、型深、吃水、重心高度、方形系數(shù)、水線面系數(shù)、中橫剖面系數(shù)以及進水角作為預報該失效模式失效概率的網(wǎng)絡輸入數(shù)據(jù),即網(wǎng)絡輸入節(jié)點個數(shù)為8.輸出層節(jié)點個數(shù)為1,代表癱船穩(wěn)性傾覆概率預報結果.
針對騎浪/橫甩失效模式,除了上述船舶相關參數(shù),同時還加入了船舶航速對失效概率的影響研究.在研究過程中發(fā)現(xiàn),型深變化對計算結果幾乎無影響.因此,本研究選擇船長、船寬、吃水、重心高度、方形系數(shù)、水線面系數(shù)以及船舶航速作為預報該失效模式失效概率的網(wǎng)絡輸入數(shù)據(jù),即網(wǎng)絡輸入節(jié)點個數(shù)為7.輸出層節(jié)點個數(shù)為1,代表騎浪/橫甩失效概率預報結果.
最終,各網(wǎng)絡節(jié)點個數(shù)見表1.

表1 各網(wǎng)絡節(jié)點個數(shù)
2.2 訓練樣本獲取
為避免輸入特征的尺度不平衡而導致網(wǎng)絡訓練時誤差下降速度過慢,甚至出現(xiàn)誤差下降梯度為零的情況,本研究對各失效模式的部分輸入特征進行量綱一化處理.各失效模式預報中選擇的相關輸入特征見表2.
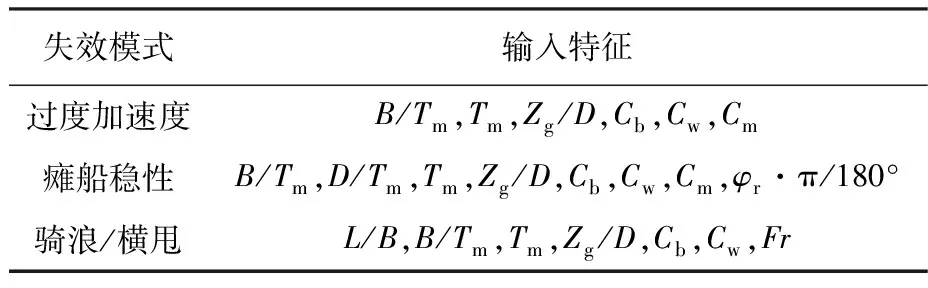
表2 各失效模式輸入特征
表2中相關符號意義如下:L為船長;B為船寬;D為型深;Tm為吃水;Zg為重心高度;Cb為方形系數(shù);Cw為水線面系數(shù);Cm為中橫剖面系數(shù);φr為進水角;Fr為弗勞德數(shù).
為驗證RBF神經(jīng)網(wǎng)絡的預報效果,本研究選取3種不同種類共4艘樣本船的各失效模式失效概率作為算例.失效概率計算結果通過所在課題組開發(fā)的計算程序獲得,該程序根據(jù)國際海事組織頒布的第二代完整穩(wěn)性衡準草案中描述的計算原理開發(fā).各樣本船的相關參數(shù)見表3.

表3 樣本船相關參數(shù)
為得到網(wǎng)絡的訓練樣本,本研究采用CAESES對4艘樣本船進行全參數(shù)化建模,按0.90、0.95、1.00、1.05、1.10比例改變包括船長、船寬、型深、方形系數(shù)、水線面系數(shù)、中橫剖面系數(shù)等建模參數(shù),得到系列船型.因為采用了全參數(shù)化方法對船體進行建模,所以可以保證在改變某一參數(shù)時,其他參數(shù)保持不變.將系列船型的型值點以及相應船型數(shù)據(jù)代入計算程序中得到計算結果.以同樣比例改變航速、重心高度等穩(wěn)性計算程序輸入數(shù)據(jù),得到4艘樣本船在不同航速以及載況下的穩(wěn)性計算結果.將以上結果進行整合得到對不同失效模式進行預報時所需的樣本集.
本研究將獲得的樣本數(shù)據(jù)以約6∶1的比例劃分為訓練集和預報集.
3 預報結果分析
3.1 過度加速度長期失效概率預報結果
本研究通過改變所選樣本船的船舶相關參數(shù),得到74組船舶樣本.而后采用課題組開發(fā)的過度加速度計算程序,獲得相應的長期失效概率.將其中64組樣本數(shù)據(jù)作為訓練集,對RBF神經(jīng)網(wǎng)絡進行訓練.采用訓練后的神經(jīng)網(wǎng)絡對剩下的10組船舶樣本進行長期失效概率預報,預報結果、期望值以及絕對百分比誤差見表4.
由表4可知,使用訓練好的RBF神經(jīng)網(wǎng)絡對船舶過度加速度長期失效概率進行預報時,樣本的最大絕對百分比誤差約為18%,最小絕對百分比誤差約為0.9%.除個別樣本預報結果與期望值的絕對百分比誤差大于10%,其余均小于10%.各預報結果基本接近對應的期望值,預報效果良好.
3.2 癱船穩(wěn)性傾覆概率預報結果
本研究通過改變所選樣本船的船舶相關參數(shù),得到116組船舶樣本.而后采用課題組開發(fā)的癱船穩(wěn)性計算程序,獲得相應的傾覆概率.將其中100組樣本數(shù)據(jù)作為訓練集,對RBF神經(jīng)網(wǎng)絡進行訓練.采用訓練后的神經(jīng)網(wǎng)絡對剩下的16組船舶樣本進行傾覆概率預報.預報結果、期望值以及絕對百分比誤差見表5.
由表5可知,使用訓練好的RBF神經(jīng)網(wǎng)絡對船舶癱船穩(wěn)性傾覆概率進行預報時,樣本的最大絕對百分比誤差約為16%,最小絕對百分比誤差約為0.4%.除個別樣本預報結果與期望值的絕對百分比誤差大于10%,其余均控制在10%以下.各預報結果基本接近對應的期望值,預報效果良好.
3.3 騎浪/橫甩失效概率預報結果
本研究通過改變所選樣本船的船舶相關參數(shù),得到58組船舶樣本.而后采用課題組開發(fā)的騎浪/橫甩計算程序,獲得相應的失效概率.將其中50組樣本數(shù)據(jù)作為訓練集,對RBF神經(jīng)網(wǎng)絡進行訓練.采用訓練后的神經(jīng)網(wǎng)絡對剩下的8組船舶樣本進行失效概率預報.預報結果、期望值以及絕對百分比誤差見表6.
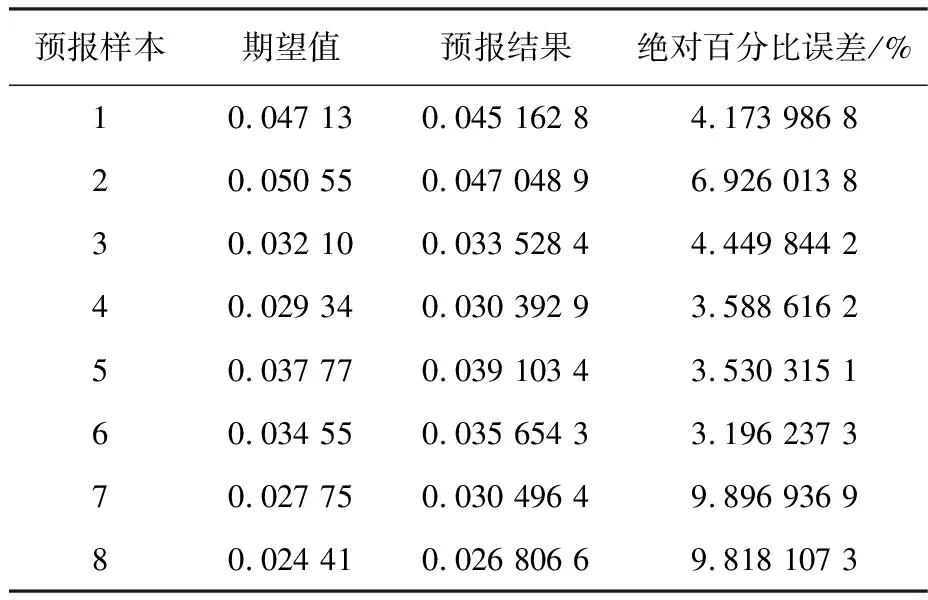
表6 騎浪/橫甩失效概率預報結果、期望值及絕對百分比誤差
由表6可知,使用訓練好的RBF神經(jīng)網(wǎng)絡對船舶騎浪/橫甩失效概率進行預報時,樣本的最大絕對百分比誤差約為9.9%,最小絕對百分比誤差約為3%.所有樣本預報結果與期望值的絕對百分比誤差均在10%以下.各預報結果基本接近對應的期望值,預報效果良好.
3.4 誤差分析
根據(jù)式(7)計算得到RBF神經(jīng)網(wǎng)絡對各失效模式失效概率預報結果的均方誤差和平均絕對百分比誤差見表7.
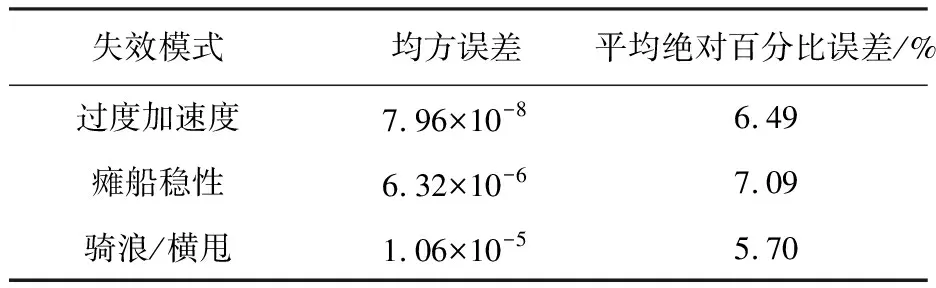
表7 各失效模式預報結果誤差
各失效模式失效概率預報結果對應的平均絕對百分比誤差均小于10%,預報效果良好,證明訓練好的RBF神經(jīng)網(wǎng)絡可用于預報船舶穩(wěn)性性能.
4 結 語
本文針對船舶穩(wěn)性的神經(jīng)網(wǎng)絡預報方法進行研究.選擇第二代完整穩(wěn)性中的過度加速度、癱船穩(wěn)性及騎浪/橫甩失效概率作為穩(wěn)性評估標準.
本研究采用以高斯函數(shù)作為徑向基函數(shù)的RBF神經(jīng)網(wǎng)絡作為預報方法.通過研究船舶相關參數(shù)對3種失效模式失效概率的影響,選擇預報網(wǎng)絡的輸入特征,并對其進行量綱一化處理.這種方法可避免將過多的不相關參數(shù)作為網(wǎng)絡的輸入特征導致確定隱藏層節(jié)點數(shù)據(jù)中心的復雜度上升,從而降低訓練時長.訓練后的RBF神經(jīng)網(wǎng)絡對樣本船各失效模式失效概率的預報結果與期望值之間的平均絕對百分比誤差均小于10%,預報結果良好,證明RBF神經(jīng)網(wǎng)絡可用于船舶穩(wěn)性預報.采用該方法對船舶穩(wěn)性進行預報,可省去計算橫搖阻尼及船舶阻力的復雜過程.
由于第二代完整穩(wěn)性共有5種失效模式,后續(xù)可將純穩(wěn)性喪失以及參數(shù)橫搖加入研究中.同時,本研究對隱藏層節(jié)點的確定采用專家經(jīng)驗法,后續(xù)可結合數(shù)值優(yōu)化算法提高預報精度.未來將繼續(xù)進行多種不同網(wǎng)絡模型對船舶穩(wěn)性預報的研究,并在研究中不斷擴充樣本數(shù)量,研究樣本數(shù)量對預報精度的影響,提高預報精度.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業(yè)標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30