無人機傾斜攝影的露天煤礦開采區域劃定方法
2023-10-14 02:52:56張禎巖
科學技術創新 2023年23期
張禎巖
(內蒙古平莊煤業(集團)有限責任公司元寶山露天煤礦,內蒙古 赤峰)
引言
露天煤礦開采區域的劃分通常是對可覆蓋范圍之內的煤礦進行空間上的區域鎖定,為后續相關開采工作的執行提供便利條件。初始的露天煤礦開采區域劃定結構多為單向的,參考文獻設定[1]和文獻[2],設定傳統綜采工作面智能化煤礦開采區域劃定方法、傳統多參量煤礦開采區域劃定方法,這一類劃定方式雖然能夠實現預期的任務及目標,但是常常受到外部環境及特定因素的影響,導致最終得出的劃定結果出現誤差。為此提出對無人機傾斜攝影的露天煤礦開采區域劃定方法的設計與驗證分析。
1 設計露天煤礦開采區域無人機傾斜攝影劃定方法
1.1 煤礦開采區域劃定指標設定及數據采集
利用協調映射算法的Delaunay 三邊界區域劃分結構,先在指定的總開采區域中設置對接點,分別布設在各個邊緣線之上,使用三角網格的限制方式,完成對開采區域的模糊劃分[3]。根據Eck 方法搭配無人機傾斜拍攝技術,將設定的節點與Delaunay 三邊界區域對接點、無人機程序進行搭接,形成一個循環性的控制結構。過程中使用三維虛擬處理技術,在可控的區域之內繪制三角網格,在劃分的模糊區域范圍之內,進行協調映射處理,并計算出模糊區域劃分的對偶值,具體如下公式(1)所示:
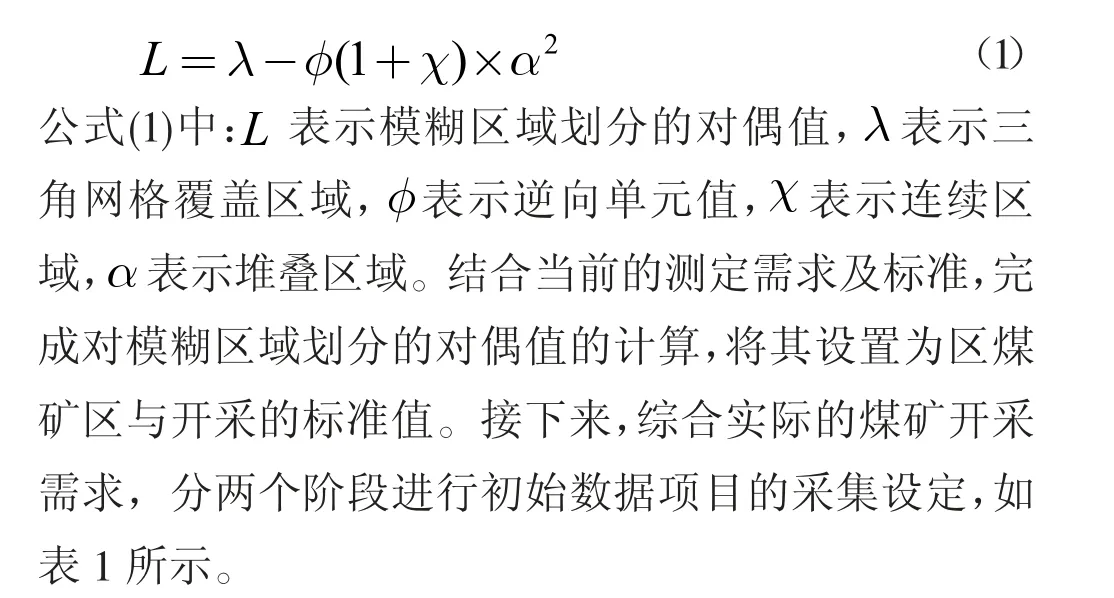
根據表1,完成對初始數據項目采集的設定,營造穩定的煤礦開采區域劃定環境,為后續工作的執行提供參考依據。
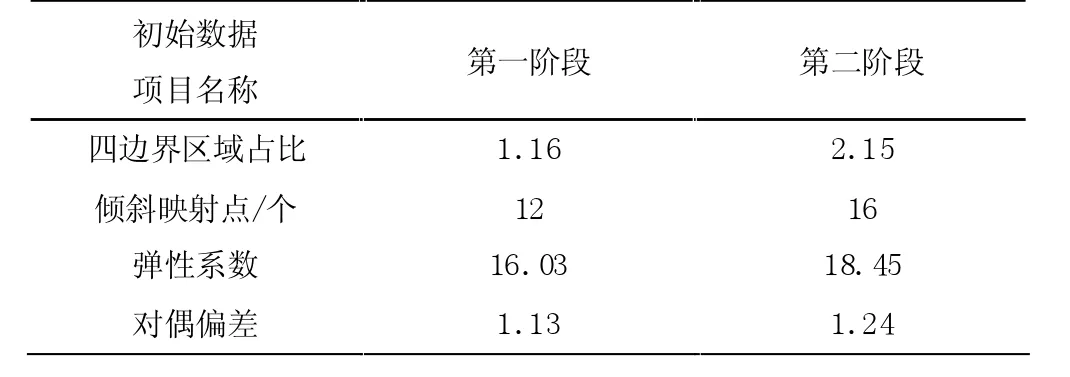
表1 初始數據項目采集設定表
1.2 部署多目標開采區域劃定傾斜攝影邊界節點
單向的煤礦開采區域劃定節點覆蓋范圍較小,導致區域劃定精度不高,影響后續的處理以及施工。結合無人機傾斜攝影技術,進行多目標開采區域劃定傾斜攝影邊界節點的部署。利用InSAR 形變觀測方式,先明確劃定邊緣位置,并計算出區域劃定邊緣值[4],具體如下公式(2)所示:

隨即,以此為基礎,在區域范圍之內設置多個區域劃定目標,在邊界位置安裝總控節點,對當前部署的節點進行搭接與關聯,進一步擴大實際的區域劃定范圍,實時監測也可以幫助工作人員掌握最新的開采區域劃分數據信息,便于后續的開采與煤礦挖掘,降低整體的安全隱患,提升區域劃定效率。
需要注意的是,無人機傾斜拍攝時,內置的程序需要與地面設定的多目標邊緣節點建立對應的匹配映射關系,這樣的形式可以更好地明確、掌握開采區域各個位置的變動情況以及開采進度,最大程度消除存在的區域劃定誤差,營造高效、協調的處理環境。此外,無人機傾斜攝影還可以保留各個周期的開采區域變動數據和信息,有利于后續相關工作的處理和執行,具有實踐意義。
1.3 構建無人機傾斜攝影開采區域劃定模型
無人機傾斜攝影對于煤礦開采區域的劃定較為靈活,能夠自動調節實際的虛擬拍攝劃定角度,自動采集實時數據以及信息,具有效率高、不受空間高度限制等特點。因此,結合無人機傾斜攝影技術,構建交互處理模型[5]。首先,制定一個基礎的測繪標準,調整無人機傾斜拍攝的曝光時間、拍照平面水平位置、飛行高度、飛行姿態等。在可控的初始模型之中設定一個傳感裝置,與傾斜拍攝程序建立映射聯系,調整攝影劃定數值,如表2 所示。
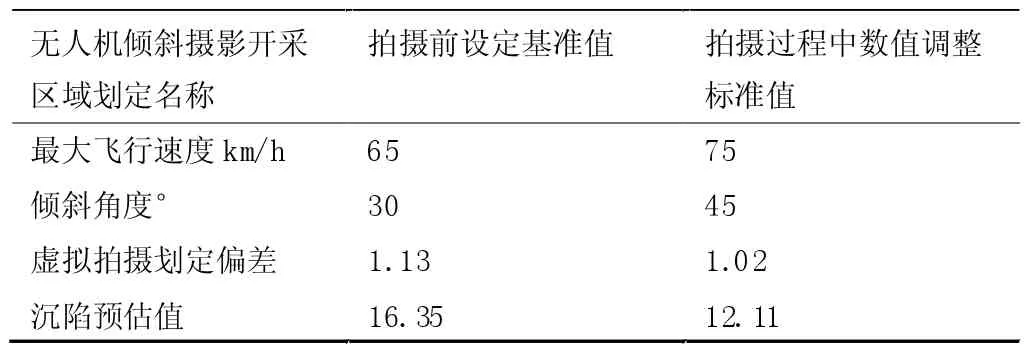
表2 無人機傾斜攝影開采區域劃定數值表
根據表2,完成對無人機傾斜攝影開采區域劃定數值的設置與調整。接下來,利用模型對基礎的劃定點進行標記,具體如圖1 所示:

圖1 無人機傾斜攝影煤礦開采區域標點圖示
根據圖1,完成對無人機傾斜攝影煤礦開采區域標點的設置,以此為基礎,明確具體的開采劃定區域,構建對應的煤礦開采區域劃定流程,如圖2 所示。
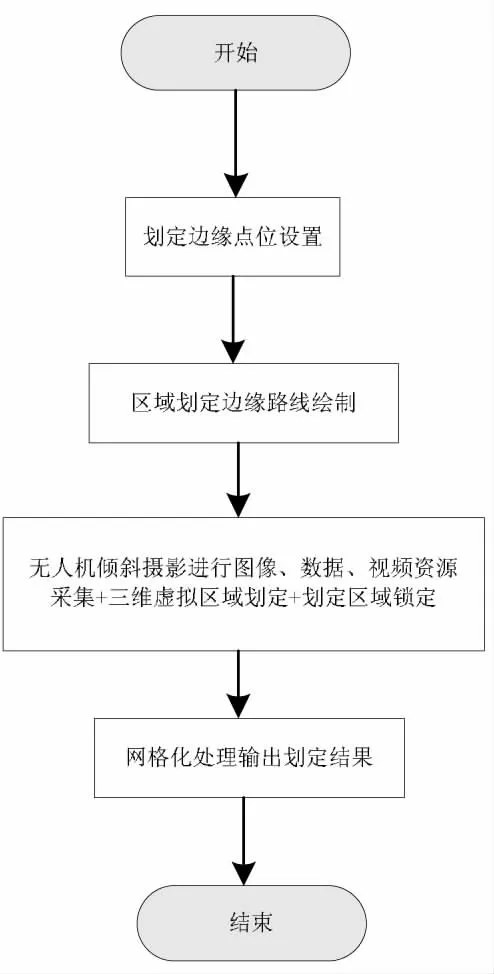
圖2 無人機傾斜攝影開采區域劃定模型執行流程圖
依據圖2,實現對無人機傾斜攝影開采區域劃定模型執行流程的設計與實踐應用,結合無人機拍攝獲取的基礎數值以及信息,進行開采區域點位的鎖定及區域邊緣的劃分,形成模糊的劃定結果,完成這一環節的區域劃定處理整合。
1.4 網格簡化處理實現區域劃定
網格簡化處理實際上是一種多維定向的區域劃分技術,一般多針對大規模的區域劃定,結合上述設計的無人機傾斜攝影區域劃定模型,進行范圍的細化明確。利用網格化的方式,將礦山的開采區域均等劃分,在核心位置設置一個輔助坐標,標定出核心的點位,具體如圖3 所示。
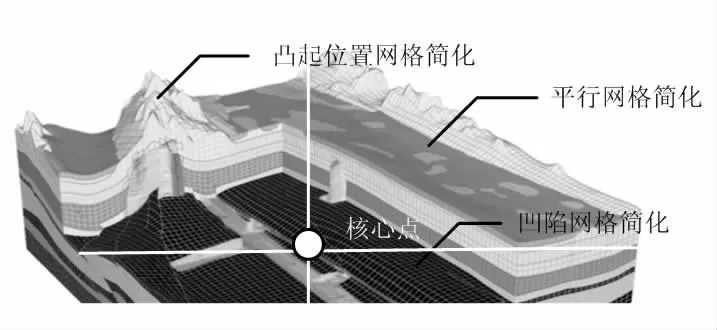
圖3 網格簡化處理結構圖示
根據圖3,完成對網格簡化處理結構的設計,隨即,利用無人機傾斜攝影技術,對各個區域的煤礦開采狀態進行獲取分析,測定出區域劃定的真實性與合理性,與模型輸出的模糊結果進行比對,確保劃定效果。
2 方法測試
2.1 測試準備
選定G 露天煤礦作為測試的主要目標對象,設定傳統綜采工作面智能化煤礦開采區域劃定測試組、傳統多參量煤礦開采區域劃定測試組以及本文方法測試組。結合無人機傾斜攝影技術,對選定的G 露天煤礦開采區域劃定方法測試環境關聯與搭建。該工程的規模相對較大,煤礦核定能力為125 Mt/a,礦井面設置32.48 km2。地面可控的標高為+ 167 ~+ 4 200 m 之間,煤礦工程為露天開采類型,方向較為繁雜。所以,為確保最終測試結果的真實合理,需要明確煤礦實際的覆蓋開采面積,選定5 個大區測定,每一個區域均需要部署一定數量的監測節點,便于實時數據以及信息的匯總整合。
2.2 測試過程及結果分析
在上述設計的測試環境之中,結合無人機傾斜攝影技術,對選定的G 露天煤礦開采區域劃定方法進行測定與驗證分析。首先,結合當前的煤礦開采進度,對基礎的劃定區域作出標定,利用無人機對該區域進行三維性掃描,獲取初始的測定數據以及信息,匯總整合之后,以待后續的使用。進行無人機基礎控制數值設置,如表3 所示。
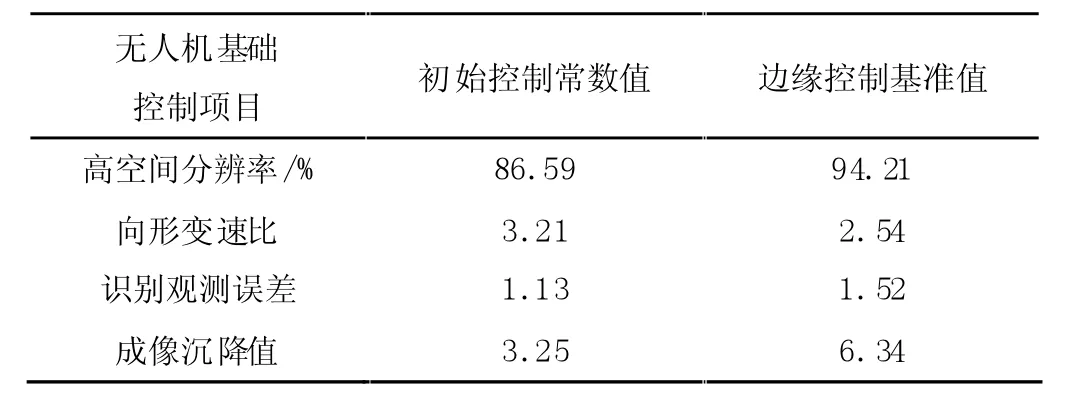
表3 無人機基礎控制數值設定表
根據表3,完成對無人機基礎控制數值的設定。隨即,明確煤礦開采的核心位置標點,利用無人機進行傾斜定位的搭建關聯,接收對應的基礎數值,對選定的5 個區域進行覆蓋性識別處理,同時計算出開采區域劃定STD 值,具體如下公式(3)所示:
根據圖4,完成對測試結果的分析:對比于傳統綜采工作面智能化煤礦開采區域劃定測試組、傳統多參量煤礦開采區域劃定測試組,此次所設計的無人機傾斜攝影露天煤礦開采區域劃定測試組最終得出的開采區域劃定STD 值被較好地控制在2.35 以下,說明在無人機傾斜攝影技術的輔助下,當前對于煤礦開采區域的劃定更為精準,誤差可控,具有實際的應用價值。

圖4 測試結果對比分析圖示
結束語
綜合上述分析,便是對無人機傾斜攝影的露天煤礦開采區域劃定方法的設計與驗證分析,與初始的煤礦開采區域劃定形式相比對,此次結合無人機傾斜攝影技術,所構建的開采區域劃定整體結構相對更加靈活、多變,自身具有較強的針對性,在面對不同的煤礦開采背景時,通過無人機傾斜攝影技術,可以精準定位當前的區域劃分點位,增加劃定的合理性與穩定性,促使各個區域建立實踐應用聯系利用SURFER軟件與AutoCAD 輔助標定,提升實測劃定效果,滿足煤礦開采工作要求的同時,營造更加真實、可靠的施工建設環境,提高經濟效益。
猜你喜歡
工業設計(2016年4期)2016-05-04 04:00:23
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:07:41
