通用性電氣傳動系統中DTFC-SVM 無傳感器控制技術探究
2023-10-17 08:33:04方召王帥旗
電氣傳動自動化 2023年5期
關鍵詞:控制技術
方召, 王帥旗
(許昌電氣職業學院,河南許昌 461000)
電氣傳動系統應用于各類電氣機械設備中,常見的如水泵、自動啟閉的車門、電梯升降機構。電動機是該系統的關鍵組成部分,其作用為實現能量轉換、為機械機構提供動力。同步磁阻電機造價低、功率因數高、能量利用效率高,成為制造通用性電氣傳動系統的重要設備,但其在實踐中也表現出不足。DTFC-SVM 無傳感器控制技術可用于改進此類電動機的啟動和運行效果,從而提升其性能。
1 通用性電氣傳動系統及同步磁阻電機
1.1 通用性電氣傳動系統的基本構成
電氣傳動系統是各類電氣機械設備的核心組成部分,其基本結構如圖1 所示。
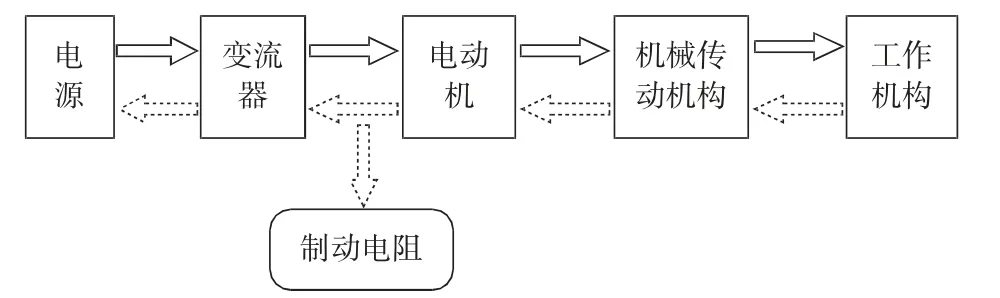
圖1 通用性電氣傳動系統的結構示意圖
1.1.1 電源部分
電源部分直接向電動機供電,電源形式包括交流電和直流電兩種,大部分電氣機械設備使用交流電源。由于電源的電壓等級較高,用電設備的額定電壓低于供電電源,因而須設置變壓器進行降壓操作[1]。
1.1.2 變流器
變流器用于傳遞功率,按照端電壓的差異可分為DC/DC 變流器(等效于直流變壓器)、AC/DC 變流器(可控整流裝置)、DC/AC 變流器(逆變器)以及AC/AC 變流器(變頻器)等。變流器能夠改變電源的電壓,使其滿足電氣設備的安全使用要求,還能控制電源的相數和頻率,提高電源的通用性。
1.1.3 電動機
電動機是電力傳動系統的動力來源,可實現電能向機械能轉換。通常以定子繞組產生電磁場,形成扭轉力矩,進而帶動機械傳動機構。電動機可按照電源形式、磁場與轉子轉速的同步性進行分類。
1.1.4 機械傳動機構
機械傳動機構將電動機產生的動能傳遞至工作機構,常見的傳動機構為齒輪、曲柄連桿機構。在傳動機構的作用下,工作機構完成特定的操作任務,如電梯的升降、地鐵車門的自動啟閉。
1.2 同步磁阻電機
同步磁阻電機(SynRM)是當前應用較為廣泛的一種同步電機,不設置勵磁繞組或者永磁體,優點為結構簡單、堅固耐用、不產生籠型轉子損耗,主要用于變頻控制。
2 基于DTFC-SVM 的電氣傳動系統無傳感器控制技術
由于電動機是電氣傳動系統的動力來源,因而成為重點控制對象。以下根據同步磁阻電機的特點,介紹DTFC-SVM 無傳感器控制技術的應用原理。其中,DTFC 表示直接扭矩和磁鏈控制技術,SVM 為空間矢量調制技術。研究過程中將PWM 變頻器作為SVM 技術的載體。
2.1 DTFC 控制技術
2.1.1 DTFC 控制技術的特點
DTFC 控制技術主要用于驅動交流電動機,并且對電動機的供電方式提出了要求——適配設計有逆變器的電流源或者電壓源。在同步磁阻電動機中,通過磁鏈矢量在扇區上的分布位置、轉矩誤差以及磁鏈矢量的幅值將電壓矢量施加至逆變器。轉矩誤差和磁鏈矢量均為精確的物理量,由于難以直接測量,在實際運行過程中須估算其數值。DTFC 控制技術簡化了同步磁阻電動機的控制方式,無需設置PI 控制器和矢量旋轉變換,電動機運行參數的變化與DTFC 控制技術的關系集中體現在速度觀測器、扭矩以及磁鏈三個方面[3]。與直接矢量控制技術不同,DTFC 產生扭矩的過程建立在定子磁鏈的基礎上,而前者依靠轉子磁鏈產生扭矩。總體而言,DTFC 控制技術具備多方面的優勢,其對不同類型的電動機具有廣泛的適應性,因而成為通用設計方案的主要技術路徑,能夠滿足無運動傳感器的電動機控制需求。在硬件設計層面,該控制技術可集成在一個數字化的控制板內,結構簡單。
2.1.2 控制原理
(1)DTFC 的控制結構
DTFC 的控制結構由速度控制器、開關表、逆變器、速度觀測器、電動機、定子磁通和轉矩觀測器以及PVM 逆變器組成。
(2)控制原理分析
電壓矢量的作用時間是DTFC 控制的重點,其控制方式可分為兩種,其一是將電壓矢量的作用時間設置為恒定值,其二是根據滯環寬度確定該參數。第一種控制方式下的開關頻率也保持為恒值。第二種控制方式能夠實現平均開關頻率恒定。在無運動傳感器的磁阻電動機控制系統中,為保證扭矩響應的速度(要求時間在1 到5 毫秒內),應該設置轉速觀測器和磁鏈觀測器兩種設備,將速度誤差控制在0~0.1%之間,調速區間控制在1 到100 之間。
2.2 DTFC-SVM 無傳感器控制技術的實現原理
2.2.1 同步磁阻電機的無運動傳感器傳動原理
基于同步磁阻電機的無傳感器傳動控制系統由電機、逆變器、定子磁通和轉矩觀測器、PI 速度控制器、速度觀測器、DTC 開關表以及SVM 等組成。系統輸入參量為定子磁鏈和轉子轉速的參考值。以dq旋轉坐標系為背景,同步磁阻電機的控制模型可表示如下:
式中,將轉子的空間角速度記為ωr,ψd、ψq分別為d 軸和q 軸對應的定子磁通量,id、iq為d 軸和q軸對應的電流,ud、uq為兩個軸對應的電壓分量,Ld和Lq分別為兩軸對應的電感,te為電機的電磁轉矩,Rs表示相繞組的電阻值。
2.2.2 磁通估算
根據DTFC 控制技術的實現原理,磁通量是重要的參數,通過磁通估算器獲取該參數。電機的電流模型和電壓模型是磁通估算器的理論基礎,電壓模型適用于電機高速運轉時的磁通估算,電流模型適用于電機低速運轉時的磁通量估算。當電機轉速適中時,兩種估算模式可實現平滑轉換,依據為電流誤差,由PI 速度控制器實現轉換過程:
2.2.3 扭矩估算
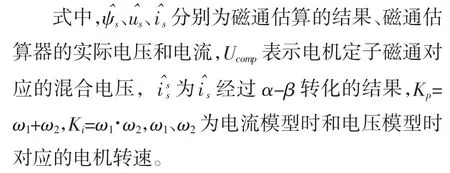
在獲得定子電流和定子磁通量兩個參數后,按照式(6)估算出轉矩:
式中,ψsα、ψsβ、isα、isβ分別為α、β 方向上的磁通分量和電流分量。
2.2.4 DTFC-SVM 控制
(1)磁通、扭矩的參考值及估算值
通過式(4)和式(6)計算出磁通、扭矩的估算值,將其對應的參考值分別記為ψ*s、T*s,參考值和估算值之間存在一定的差值,分別記為εψ、εt,將滯環寬度記為hm。當εψ>0 時,有磁鏈ψs=+1,當εψ<0時,有磁鏈ψs=-1。當εt>hm時,有直接扭矩Te=+1,當εt<-hm時,有直接扭矩Te=-1。當εt<hm時,有直接扭矩Te=0。
(2)逆變器電壓矢量控制
逆變器上施加的電壓矢量與磁鏈矢量在扇區上的分布位置密切相關,因而必須先掌握具體的分布扇區。在DTFC-SVM 控制技術中,通過DTFC 從開關表中選擇電壓矢量,將其作用于逆變器上,但實施這一步驟之前,先由SVM 對該電壓矢量進行調制。具體的調制方法如下:以電機的一個完整開關周期為分析對象,其電壓矢量存在零矢量和非零矢量兩種狀態,在周期內實現切換,可通過相鄰的電壓零矢量和非零矢量合成任何所需的電壓矢量[4]。
2.3 預期電壓矢量在DTFC-SVM 無傳感器控制系統中的應用
DTFC-SVM 控制技術在同步磁阻電機中應用廣泛,該控制方法的優勢在于響應快捷、結構簡單,并消除了系統耦合方面的問題。開關電壓矢量在電機啟停過程中發揮著重要作用,需要正確設置這一參數。在傳統的DTFC-SVM 控制模式下,電機系統中由同一個開關電壓矢量控制定子的旋轉速度及其磁鏈矢量,該電壓值通常與系統的預期控制電壓不相等,二者之間存在一定的差值,因而制約了電機的控制效果,形成了誤差。滯環比較器通過誤差的正負性來判斷是否存在電壓偏差,但僅能實現定性判斷,無法準確計算出差值,因而也無從判斷該參數對電機轉速的影響程度。為了有效解決以上問題,在DTFC-SVM 控制技術中引入預期電壓矢量,以實現直接扭矩控制。同時,通過扭矩調節器控制電磁扭矩,使其替代傳統滯環比較器的功能。在上一個系統采樣周期內,將定子磁鏈記為ψs,將其對應的扭矩記為te,這兩個參數決定了預期電壓矢量的取值,可將預期電壓矢量視作相鄰零電壓矢量與非零開關電壓矢量的調制結果,其計算表達式如下:
式中,u′s為預期電壓矢量,u′α、u′β分別為u′s的分量,Rs為相繞組的電阻,轉矩的角增量記為Δδ,控制周期記為ΔT,ρs為定子磁鏈ψs在靜止ABC 軸系中的相位角,iα、iβ為α-β 坐標系上對應的電流分量[5]。
2.4 融入預期電壓的DTFC-SVM 無傳感器控制技術仿真研究
2.4.1 控制模型構成
仿真過程中針對同步磁阻電機建立DTFCSVM 無傳感器控制系統,其主要構成包括調節器、預期電壓矢量計算模塊、電壓矢量調制模塊、電壓源逆變器、電機、轉子位置檢測模塊等。
2.4.2 建模方法
采用Matlab中的Simulink可視化仿真工具組件,建立基于預期電壓的DTFC-SVM 控制模型,為了體現該控制模型的效果,將傳統的DTFC-SVM(不引入預期電壓)作為對照組,給定的電機運行參數參考表1。
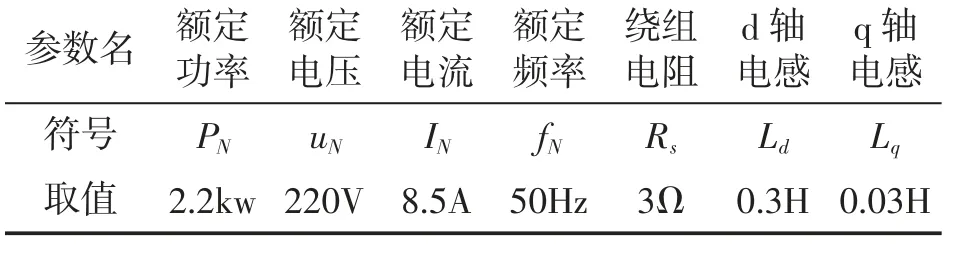
表1 仿真研究中電機的給定參數
2.4.3 仿真結果分析
(1)電機轉速仿真結果分析
①對照組的轉速仿真結果
對照組同樣采用DTFC-SVM 無傳感器控制技術,但不采用預期電壓,同步磁阻電機的轉速在啟動后約0.017s 時達到峰值,最高轉速為771r/min,從0.017s 到0.1s,轉速逐漸下降,隨后穩定在大約600r/min。
②實驗組的轉速仿真結果
實驗組的DTFC-SVM 無傳感器控制技術中融入了預期電壓,同步磁阻電機的轉速在啟動后約0.007s 時達到峰值,最高轉速達到了801r/min,從0.007s 到0.01s,轉速出現明顯下降,隨后穩定在大約600r/min。對比實驗組和對照組的數據可知,融入預期電壓的DTFC-SVM 無傳感器控制技術能夠實現快速啟動,電機也更快地進入了穩定狀態,其轉速響應速度明顯高于不引入預期電壓的控制系統。
(2)電機轉矩仿真結果分析
①對照組的轉矩仿真結果
觀測時間為0.4s,在電機啟動后的0s~0.011s內,轉矩呈現出一定的波動性,數值在4.3N·m~5.4N·m 之間,隨后快速下降。轉矩值在0.021s~0.2s內出現平臺,但數值波動變化,范圍在-1.1N·m~0.4N·m 之間。0.2s~0.4s 形成了另一個平臺期,轉矩值在0.9N·m~2.0N·m 之間波動變化。
②實驗組的轉矩仿真結果
實驗組觀測時間同樣為0.4s,當電機啟動的一瞬間,轉矩值達到29.8N·m,隨后快速下降,于0.009s時達到最低值-4.7N·m。從0.009s~0.012s,轉矩反彈至0N·m,并保持穩定至0.2s。之后,轉矩在很短的時間內小幅上升,達到1.3N·m,并保持穩定。從實驗組和對照組的轉矩變化情況可知,融入預期電壓的DTFC-SVM 無傳感器控制技術能夠快速響應轉矩,并且穩定后不易出現波動。
3 結論
同步磁阻電動機具有較多優勢,是制造電氣傳動系統的常用組件,但其在啟動時容易出現較大的磁鏈和轉矩脈動。采用DTFC-SVM 無傳感器控制技術優化該電動機的運行狀態,并引入預期電壓矢量,新的控制方法可顯著提升電機轉速響應和轉矩響應,使其快速進入穩定階段,使脈動過大的問題得到了有效控制。
猜你喜歡
機電安全(2022年1期)2022-08-27 02:15:16
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
電子測試(2018年14期)2018-09-26 06:04:44
上海大中型電機(2017年4期)2017-02-06 05:27:06
山東工業技術(2016年15期)2016-12-01 05:30:51
照明工程學報(2016年3期)2016-06-01 12:17:56
水電站機電技術(2014年4期)2014-10-13 08:30:07
水電站機電技術(2014年1期)2014-09-26 11:59:46
導航定位與授時(2014年2期)2014-04-27 13:41:08