面向小型無人艇健康監測系統方案設計與實施
2023-10-18 02:32:46殷文慧郭棟王飛郭煜張安通
裝備環境工程 2023年9期
殷文慧,郭棟,王飛,郭煜,張安通
(1.中國船舶科學研究中心,江蘇 無錫 214082;2.深海技術科學太湖實驗室,江蘇 無錫 214100)
無人艇近年來逐漸成為各領域關注的焦點,在海 洋科學研究、海上救援等方面應用前景廣泛[1-2]。這些應用場景對無人艇的可靠性和安全性提出了更高的要求,因此無人艇的健康管理顯得尤為重要。健康管理系統可以實時監測、評估無人艇的運行狀態,并及時預警潛在的故障和風險,從而提高無人艇的使用壽命,降低運行成本,保障水上安全。
船舶健康管理技術在近年來得到了廣泛關注,學術界和工業界已經開展了大量研究[3-7]。學者們針對船舶的各種關鍵設備和系統進行了實時監測和性能評估,如動力系統監測[8-10]、電力系統監測[11-13]、船舶結構健康監測[14-17]、船舶環境與能源系統監測等[18-20]。通過采集各類傳感器數據,研究者們利用大數據分析、機器學習、深度學習等先進技術實現了對故障的及時診斷和預測[21-24]。人工智能技術的引入,使得船舶健康管理在故障診斷、預測性維護等方面取得了顯著進展[25-26]。
當前的船舶健康管理技術已經取得了顯著進步,但面對小型無人艇的相關研究仍存在一些問題。首先,針對小型無人艇這一對象的健康管理研究相對較少,其特有的小型化、無人化、自主作業以及在惡劣環境工作等特點,使其面臨與傳統船舶不同的一系列健康管理挑戰。其次,現有的研究更多地關注某一設備的具體故障,如柴油機潤滑系統故障、軸承故障、曲軸裂紋故障等,缺乏從系統級角度和船舶整體性能角度進行分析。
鑒于此,本文旨在從船舶系統角度出發,充分考慮小型無人艇相較于傳統船舶的特殊性以及在運行過程中可能面臨的各種挑戰,權衡各系統重要程度及復雜程度,針對無人艇動力電力系統進行健康監測方案設計與實施。通過全面監測無人艇動力電力系統的運行狀態,希望能為未來小型無人艇的健康管理研究提供參考,以實現對無人艇的全面、深入、精細管理,提高其可靠性和安全性。
無人艇的健康管理,特別是針對其動力、電力系統的健康管理,是提高無人艇系統可靠性的關鍵。本文的研究不僅有助于解決小型無人艇在特殊環境和使用條件下的健康管理問題,而且從系統級別、船舶整體性能角度出發,提供一種新的視角和方法,為無人艇健康管理技術發展提供參考。
1 小型無人艇健康管理特性及挑戰
小型無人艇健康管理的特性和挑戰涵蓋了多個維度,主要圍繞艇體小型化、船舶應用環境、無人操作與自主性,以及惡劣環境中的運作等方面展開。
小型化及船舶應用特點:小型無人艇體積小,且需要滿足高性能的船舶應用要求,健康管理系統需要在有限的體積和載荷下,實現更高的性能。這一特點對傳感器的選擇、部署和優化,以及數據采集、處理和實時傳輸的設計提出了挑戰。
惡劣環境工作:無人艇根據其工作特點和應用場景,需要在惡劣環境中工作,其健康管理系統需要具備強干擾性、防水性和防腐蝕性,對數據采集和通信也提出了更高的要求,也提升了系統設計和實施的難度。
無人自主作業:無人艇大部分情況下都需要無人干預地執行任務,自主作業特性要求其健康管理系統具備更強的自主性和智能化水平,具備實時監控和診斷能力,能處理大量的實時數據,包括數據去噪、平滑處理、特征提取等。
成本與效益權衡:無人艇的投資和運營成本相對較低,健康管理系統的設計和實施需要在滿足性能要求的前提下,盡可能降低成本,使得系統具有高性價比。
2 健康監測系統方案設計與實施
2.1 無人艇系統組成與設備介紹
無人艇由一系列互相協作的系統組成,按照功能主要劃分為動力系統、電力系統、通信導航系統、態勢感知系統、遠程控制系統、航行保障系統等。各系統的重要程度和復雜性各不相同,面向全船的健康管理系統以提升全船的可靠性、可用性為目標,按照基于視情維修的開放體系(OSA-CBM)層級劃分,分別設定不同的健康管理目標,對各系統進行權衡分級。其中,動力系統負責提供推動力,使無人艇能夠在水域中自由移動,其性能好壞直接影響無人艇的速度、靈活性和行駛續航能力。電力系統則提供電力支持,為艇上的所有電氣設備供電,其穩定性和可靠性對無人艇的整體運行至關重要。動力電力系統作為支撐無人艇運行的核心,其健康狀況直接關系到無人艇的運行安全和效率,因此將其健康管理作為本文研究重點。
本文健康監測系統的搭建對象為7 t 級小型無人艇,艙底平面布置俯視圖如圖1 所示。其動力系統為雙機雙槳模式,每個機艙內推進系統由一四缸柴油機、齒輪箱、推進軸系和推進器組成;電力系統由發電機、配電線纜、用電設備組成,主要用電設備是位于機艙的進風機和排風機,船上發電機與岸電的切換電源、進風機等用電設備電源模塊均位于船艏控制艙內。
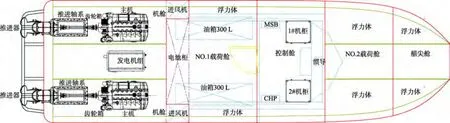
圖1 小型無人艇艙底布置俯視圖Fig.1 Top view for bilge layout of small unmanned surface vehicle
2.2 測點與傳感器選擇、部署實施
為了對無人艇動力電力系統的運行狀況進行全面監測,本文根據系統的工作原理以及常見的典型故障,設計面向小型無人艇動力電力系統的健康監測系統,架構如圖2 所示。

圖2 健康監測系統架構Fig.2 Health monitoring system architecture
選擇以下測點,并在這些位置部署了傳感器。
1)柴油機氣缸蓋。氣缸蓋承受著柴油機內燃氣產生的高壓力,對于反映柴油機工作狀態具有較高的敏感性。本系統在柴油機一缸、四缸位置安裝單向振動傳感器(如圖3a 所示),實時監測氣缸蓋內部的磨損、松動、高壓燃氣泄漏等問題[27-28]。
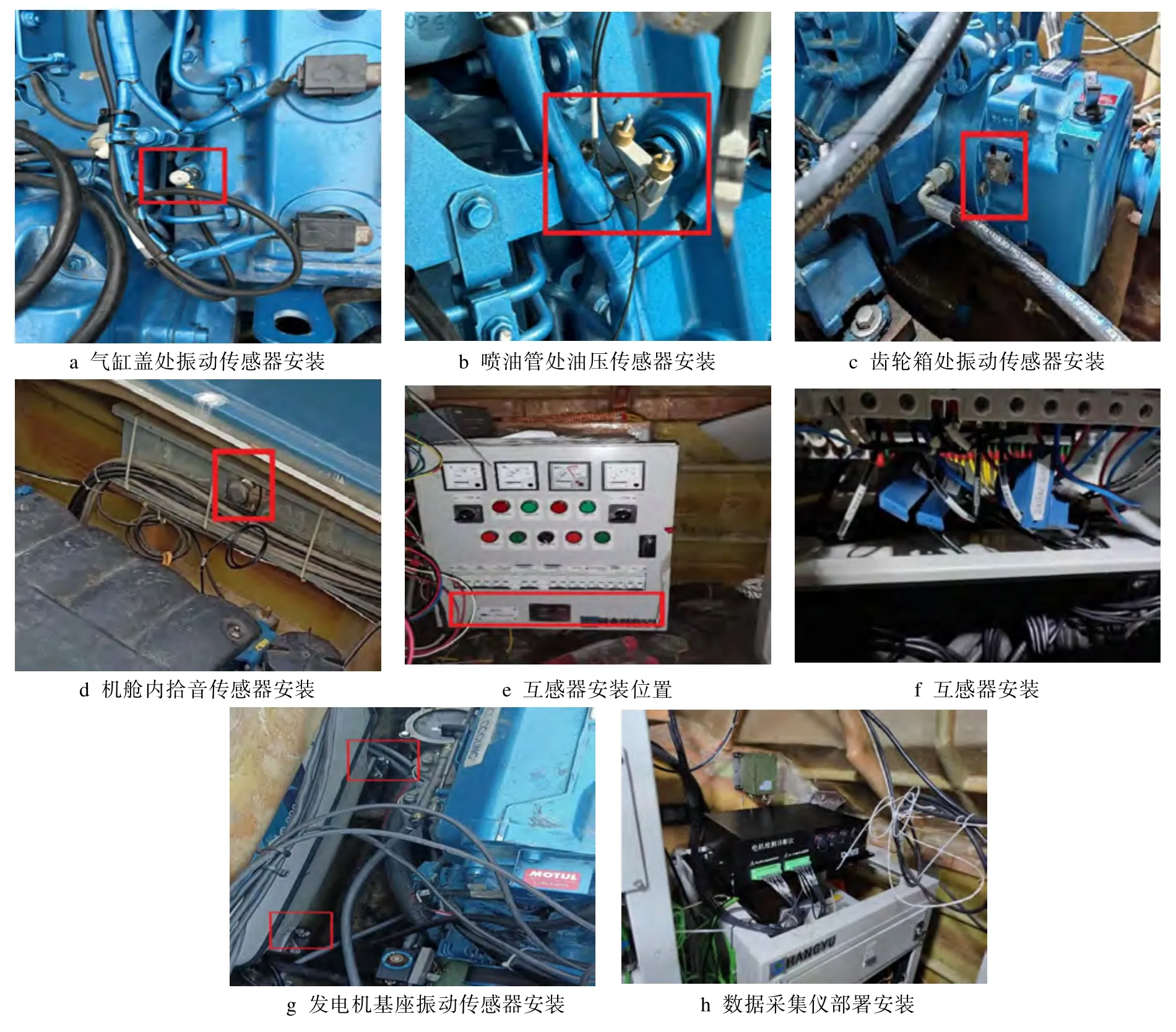
圖3 健康監測系統部署及安裝Fig.3 Deployment and installation of health monitoring system:a) vibration sensor installation at cylinder head;b) oil pressure sensor installation at fuel injector pipe;c) vibration sensor installation at gearbox;d) sound pickup sensor installation within engine compartment;e) transformer installation location;f) transformer installation;g) vibration sensor installation at generator base;h) data logger deployment and installation
2)噴油器油管。噴油管負責將高壓燃油輸送到氣缸內,其工作狀態直接影響到燃油噴射的穩定性和柴油機的燃燒效率。本系統選擇在柴油機一缸噴油器油管上安裝油壓傳感器(如圖3b 所示),以監測油壓變化,并及時發現噴油器故障、油管堵塞、油泵不正常工作等問題。
3)齒輪箱。齒輪箱運行狀態對動力推進系統性能有重大影響。齒輪運轉中可能出現的故障、齒面磨損、軸承故障等都會導致振動變化。為實時監測這些變化,本文在齒輪箱上安裝了一個三向振動傳感器(如圖3c 所示),分別監測齒輪箱的水平、垂直和軸向振動,提供更全面的齒輪箱狀態信息。
4)機艙內部。機艙內各種設備在運行時,會產生各種聲音。這些聲音包含了豐富的信息,可以反映出設備的工作狀態。本系統在兩機艙中各安裝2 個拾音傳感器(如圖3d 所示),捕捉機艙內部聲音信號,并進行聲音信號分析。
5)電力系統。電力系統的穩定性直接關系到無人艇的運行效率。本系統在發電機、風機等重要用電設備電路上安裝互感器(如圖3e、f 所示),實時監測電壓和電流,從而發現和預防過電壓、欠電壓、過流、短路等問題,保證電力系統穩定運行[29-31]。
6)發電機基座。發電機作為電力系統的核心部分,其運行穩定性對保障無人艇的持續工作至關重要。基座的振動狀態反映了發電機的運行狀況,軸承磨損、轉子失衡、定轉子間隙變化等都可能導致振動的異常[32]。本系統在發電機基座上安裝了單向振動傳感器(如圖3g 所示),實時監測基座的振動狀況。
上述傳感器的監控對象、類型及安裝位置匯總見表1。上述測點位置及傳感器覆蓋了無人艇動力、電力系統的主要組成部分,為無人艇健康監測提供全面的信息,從而可以提前發現潛在故障,為故障診斷提供有力依據。需要明確的是,傳感器的選擇和部署并非一成不變的,應根據無人艇的具體工作環境和任務需求進行動態調整。如果在后續的運行中發現新的故障模式,或者有新的監測需求,可能需要增加新的測點,或者更換類型更合適的傳感器。
2.3 數據預處理與分析
無人艇航行階段,健康監測系統成功收集到各傳感器的工作數據,反映出無人艇在運行過程中的狀態和性能。為了更好地理解和利用這些數據,本文對采集到的柴油機振動數據進行初步處理與分析。常用的數據處理方法包括時域分析、頻域分析、時頻域分析、統計分析、機器學習等。
振動信號時域分析反映的是振動信號隨時間的變化情況,直接在時間序列數據上進行,無需轉換到其他數學形式,用于評估和描述信號波形在時間軸上的變化特性。不同時刻表現出來的狀態值,其統計數字特征能夠反映設備在某一時間上的表現行為,從而用來表征設備的運行狀態信息。在時域分析中,信號x(t)通常被視為時間t的函數。該方法主要關注信號的振幅、相位、周期性等屬性。由于實際采樣的原始信號沒有明確的起始點,截取兩發動機1 s 噴油振動信號定位出一缸的工作周期,分別映射到一缸和四缸振動信號時刻上,得到兩發動機1 個工作周期內振動沖擊信號,如圖4 所示。根據發動機各缸工作的相位,每個沖擊對應不同的沖擊類型。結合發動機各缸做功先后順序(1-3-4-2),得出圖4c、d 中方框部分為發動機第一、二缸的做功峰值,圖4e、f 中方框部分為發動機第三、四缸的做功峰值。峰值較小,且持續時間較短的沖擊為氣門落座沖擊位置。通過對比不同時刻采集到的振動沖擊信號分析可以得出,發動機無失火現象發生。
時頻域分析方法能夠揭示信號在時間和頻率2個維度上的復雜結構。旨在表示信號x(t)在時間t和頻率f上的聯合分布。這種表示通常通過時頻分布(Time-Frequency Distribution,TFD)來實現。本文采用較常用的時頻域分析方法之一短時傅里葉變換(Short-Time Fourier Transform,STFT),對發動機振動信號進行處理。
式中:x(t) 為原始信號,是時間t的函數;τ為虛擬時間變量,用于在整合操作中替換實際時間t;w(t-τ)為窗函數,用于選取信號x(t)的局部片段,窗函數在t τ-附近為非0,其余地方為0;為復指數函數,其中j 為虛數單位,f為頻率,用于分析x(τ)在不同頻率下的表現,t、f為局部時間和頻率變量,用于表示STFT 的2 個維度。
在式(1)中,w(t-τ)和 e-j2πfτ的乘積作用于x(τ),局部化地提取x(t) 在時間t和頻率f下的信息。該公式通過將信號局部化到一個小窗內,然后對該窗內的信號進行傅里葉變換,從而能夠同時獲取信號在特定時間和頻率下的信息。
同一時刻兩發動機第四缸的時頻譜如圖5 所示,高亮區域為頻譜峰值,頻譜能量幅值集中在0.03~0.04 s、300~3 000 Hz 區域。當發動機氣缸出現明顯異常時,落座沖擊和爆燃沖擊將會不穩定,部分能量將會分布在一些特有的故障特征頻帶上,能量集中區域會發生明顯改變。若以2#發動機作為正常對照組,1#發動機為實驗組,觀察能量集中的高亮區域,兩圖在頻譜能量分布上無明顯區別,初步說明兩發動機運行狀態相似。
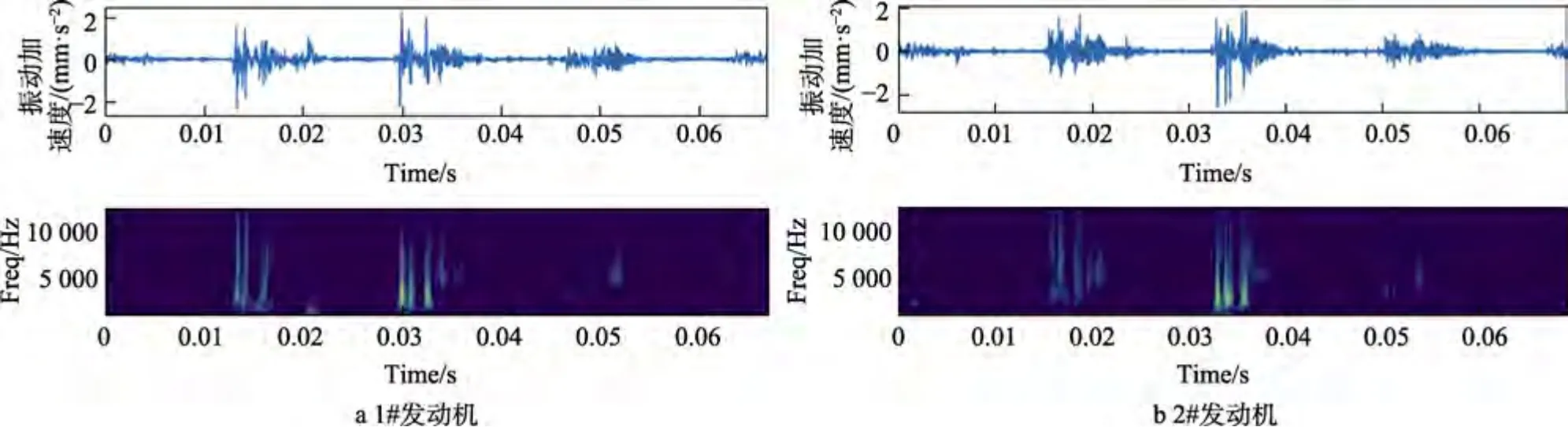
圖5 兩發動機第四缸振動時頻譜Fig.5 Vibration frequency spectrum of the fourth cylinder of two engines:a) diesel 1;b) diesel 2
在復雜的現實環境中,由于各種噪聲和擾動的影響,傳統的數據分析方法可能并不足以發現隱藏的異常模式。基于自編碼器(Autoencoder)的異常檢測是一種無監督學習方法,用于識別數據中的異常或離群點。這種方法特別適用于高維數據,如振動信號,其中異常可能在多個維度上表現出來。自編碼器是一種神經網絡,由編碼器(Encoder)和解碼器(Decoder)2 部分組成。編碼器將輸入數據壓縮成一個低維隱層表示(或編碼),解碼器則從這個低維編碼重構回原始數據,見式(2)。
式中:x為原始數據;z為編碼后的低維表示;為重構的數據;θe、θd為編碼器和解碼器的參數。目標是最小化重構誤差,使用均方誤差(MSE)作為損失函數:
基于自編碼器的異常檢測方法能有效地應用于振動信號的實時監測,從而實現對發動機狀態的準確判斷。本文采集數據來自2 臺發動機一缸振動信號,選擇2#發動機振動信號作為訓練數據,使用這些數據訓練自編碼器,以最小化重構誤差,建立正常發動機頻譜能量分布的樣本空間。在訓練集上,計算每個數據點的重構誤差,并在重構誤差的均值基礎上加一常數作為閾值,使用1#發動機振動數據運行自編碼器,1#發動機的頻譜能量分布作為驗證集,對于重構誤差超過閾值的數據點,標記為異常。兩發動機損失函數結果如圖6 所示。可以看出,1#發動機數據集的整體Loss 值近似于2#發動機,1#發動機數據集的頻譜能量分布與2#發動機的訓練集差別不大,說明兩發動機的工作狀態相似。
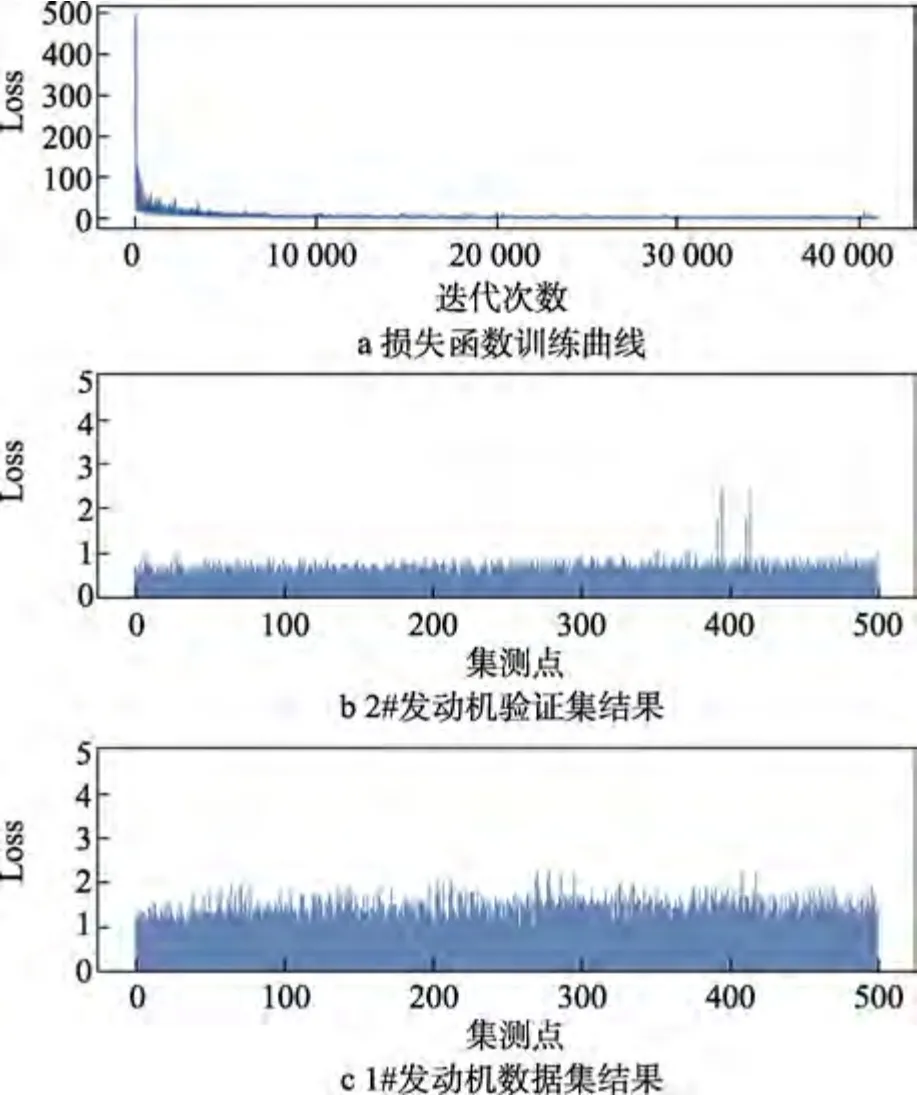
圖6 基于自編碼器的異常檢測結果Fig.6 Anomaly detection results based on autoencoder:a) loss function training curve;b) 2#engcne vaeidation set results;c) 1# engine dataset results
3 研究展望
小型無人艇的健康管理目前仍處在狀態監測階段,為提升無人艇作業效率和安全性,需進一步優化監測系統,主要包括以下內容。
1)狀態評估。有效評價無人艇運行過程中的健康狀況。當前的狀態監測主要關注無人艇各個設備部件的運行參數,但這些參數僅能提供有限的信息。狀態評估需要通過對這些參數進行深入分析,結合無人艇的工作環境、負載、歷史數據等多維度信息,綜合評估無人艇的運行狀態。這將有助于識別潛在的故障風險,為后續的故障診斷和預測提供依據。
2)故障診斷。準確、及時地識別無人艇故障原因。當前的故障診斷方法主要包括專家系統、模式識別、神經網絡等,但在小型無人艇領域的應用有待提高。未來研究需要針對小型無人艇特點,發展更高效、準確的故障診斷技術。此外,考慮到無人艇在惡劣環境下的作業需求,故障診斷方法應具備良好的魯棒性,能在不確定性條件下保持高識別準確率。
3)故障預測。提前預警潛在故障,為無人艇的維護和修理提供充足時間。未來的研究應關注提高故障預測的準確性和可靠性,發展適用于小型無人艇的預測模型,結合大數據、人工智能等先進技術,實現對海量數據的高效處理和分析,為故障預測提供強有力的支持。
除了上述功能的研究與實施外,無人艇健康監測系統還需關注以下幾個方面。
1)數據融合。充分利用多種傳感器采集的數據,通過數據融合技術,提高健康監測系統的準確性和可靠性。這包括對多源異構數據的預處理、特征提取、融合算法設計等方面的研究。
2)自適應監測。針對無人艇在不同工況下的特點,研究自適應健康監測方法。通過動態調整監測參數和策略,使健康監測系統在不同環境和任務下均能保持高性能。
3)智能決策支持。將健康監測系統與無人艇的控制系統相結合,為無人艇的自主決策提供實時、有效的健康信息。通過分析和預測無人艇的運行狀態和故障風險,為無人艇的任務規劃和執行提供參考。
4)安全與隱私保護。在健康監測系統中,對無人艇的數據采集、傳輸和存儲等環節的安全和隱私保護至關重要。未來研究需關注加密、授權等技術的應用,確保健康監測數據的安全性和可信度。
4 結語
本文專注于小型無人艇的健康管理,針對其特性及挑戰,提出并實施了一套專門針對小型無人艇的健康監測系統。系統重點關注動力電力系統,根據典型故障確定監測點位置,選擇合適的傳感器,并完成部署。通過采用時域分析、時頻譜分析以及基于自編碼器的異常檢測技術方法對數據進行預處理與分析,證實了監測系統的有效性,它能有效監測故障,維護無人艇的穩定運行。盡管當前的研究提供了切實可行的解決方案,監測系統仍需進一步優化,以提高作業效率和安全性。未來的研究將更加深入地探討如何更精準地進行狀態評估、故障診斷和故障預測,并將考慮利用大數據和人工智能等技術,對海量數據進行高效處理和分析。總的來說,這項研究不僅為小型無人艇的健康管理提供了實用的工具,同時也指出了未來的研究方向。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44