建筑井道曳引式升降機制動故障檢測方法
2023-10-18 09:48:37宋彥霖
工程機械與維修 2023年5期
關鍵詞:建筑
宋彥霖
摘要:為實現(xiàn)對建筑井道曳引式升降機制動故障的精準檢測,開展對其檢測方法的設計研究。為實現(xiàn)自動化檢測,設計曳引式升降機制動檢測裝置結(jié)構(gòu),通過機器操作實現(xiàn)檢測。根據(jù)曳引式升降機的制動特點,選擇將彈簧的彈性系數(shù)和制動器間隙作為制動性能指標。根據(jù)制動特征量測定結(jié)果,實現(xiàn)對曳引式升降機制動故障的判定。通過實例證明,新的檢測方法在實際應用中可以實現(xiàn)對制動故障的檢測,并可根據(jù)制動力矩實現(xiàn)對故障具體原因的說明。
關鍵詞:建筑;曳引式;制動;故障檢測;升降機;井道
0? ?引言
在建筑施工項目中,層數(shù)較高或建筑高度較高時,通常都會設置井道結(jié)構(gòu),以便應用曳引式升降機實現(xiàn)施工中的上下運行。建筑井道曳引式升降機是建設施工現(xiàn)場主要的危險源之一,由于保護不當而造成的安全事故頻頻發(fā)生[1]。
當前,針對建筑井道曳引式升降機的保護措施形式復雜多樣,但缺少了定型化和工具化的要求,且保護措施的嚴密性和可靠性都不理想。為此根據(jù)不同曳引式升降機水平保護的實際需要,針對其制度故障問題的檢測,成為了當前該領域重點研究的內(nèi)容。
制動性能的好壞,會直接影響到建筑井道曳引式升降機的使用安全。曳引式升降機的制動功能在升降機停站時,用于保持升降機處于靜止狀態(tài)[2]。而當升降機出現(xiàn)故障問題時,要使其緊急減速并停車,確保其始終保持相對靜止狀態(tài)。為實現(xiàn)對建筑井道曳引式升降機制動故障的精準檢測,本文開展對其檢測方法的設計研究。
1? ?曳引式升降機制動檢測裝置結(jié)構(gòu)設計
本文設計了一種基于轉(zhuǎn)矩傳感器的曳引式升降機制動檢測裝置。曳引式升降機制動檢測裝置以加載馬達為主要動力源,利用慣性飛輪,來模擬曳引式升降機在真實情況下的轉(zhuǎn)動慣量[3]。在到達設定速度后,執(zhí)行制動動作,測試制動的各項指標。
1.1? ?檢測裝置的功用
該裝置主要用于測試制動線圈的電流、制動扭矩和制動速度的動態(tài)變化。通過該裝置的設計,可以實現(xiàn)對制動檢測的自動化,避免人為因素對檢測結(jié)果造成的干擾[4]。被測升降機可由傳送帶自行運送至檢測裝置上,并實現(xiàn)對被檢測位置的準確定位。
1.2? ?結(jié)構(gòu)組成與工作原理
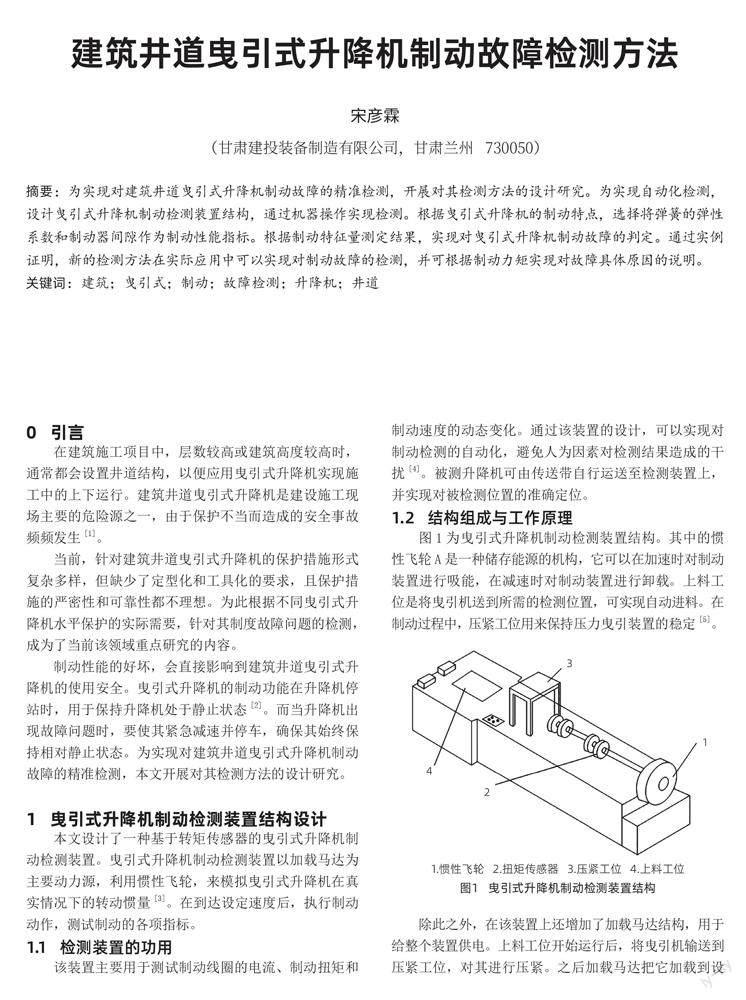
圖1為曳引式升降機制動檢測裝置結(jié)構(gòu)。其中的慣性飛輪A是一種儲存能源的機構(gòu),它可以在加速時對制動裝置進行吸能,在減速時對制動裝置進行卸載。上料工位是將曳引機送到所需的檢測位置,可實現(xiàn)自動進料。在制動過程中,壓緊工位用來保持壓力曳引裝置的穩(wěn)定[5]。
除此之外,在該裝置上還增加了加載馬達結(jié)構(gòu),用于給整個裝置供電。上料工位開始運行后,將曳引機輸送到壓緊工位,對其進行壓緊。之后加載馬達把它加載到設定的速度,然后將其松開。此時,磁鐵制動裝置就失去動力,而彈簧會受到彈性的作用,對曳引式升降機的制動裝置進行擠壓[6]。
利用扭矩傳感器采集檢測數(shù)據(jù),對制動力矩檢測數(shù)據(jù)與轉(zhuǎn)速隨時間的變化進行分析,即可為后續(xù)故障檢測提供依據(jù)。
2? ?制動性能指標選擇
根據(jù)曳引式升降機制動條件,選擇將彈簧彈性系數(shù)、制動器間隙作為制動性能指標。在制動器運行過程中,電磁線被切斷時,彈簧受彈力的影響而發(fā)生變形,其反應的時間取決于彈簧的彈性系數(shù)。
在彈性系數(shù)較大時,從摩擦片和制動盤從接觸到充分壓縮所需的時間較短,反應速度也較快;在彈性系數(shù)較小時,變形恢復所需的時間較長[7]。所以,彈簧的彈性系數(shù)對制動的反應特性有很大的影響。
在充分壓縮時,制動片的間隙對彈簧的壓縮力有很大影響,從而決定了最大制動力矩。從力學的角度分析,在彈簧受壓或受拉時,其所產(chǎn)生的彈力,一定是由其伸縮量與其彈性系數(shù)之積確定。彈簧力可用下述公式表示:
FS=KS·X(1)
式中:FS表示彈簧力;KS表示彈性系數(shù);X表示彈簧的壓縮量。
從上述公式可以看出,在彈性系數(shù)一定的情況下,隨著制動間隙增大,彈簧受壓時的壓縮量減少,在制動盤上的彈力就會減少,制動盤上的壓力也會減少。這便會引起制動力矩相應降低,制動時間相應增加。
3? ?制動特征量測定與制動故障判定
通過上述論述可知,彈簧的回彈系數(shù)是制動響應速度的重要因素。彈性系數(shù)對彈簧力的加載時間有一定影響,從摩擦盤與制動盤剛接觸,到被完全壓緊的時間也有一定不同,進而對制動力矩的作用時間產(chǎn)生一定影響。
取制動力矩曲線起點的一段上升曲線,采用線性回歸法,對其進行擬合,并計算出其下降坡度。坡度與彈性系數(shù)呈線性關系,從而反映出其彈性系數(shù)。如果坡度過小,則反應速度過快,制動時間過長,無法達到制動的性能指標,表明其彈簧彈性系數(shù)過低[8],須對其進行更換。
制動力矩的計算公式如下:
M=mdFS(2)
式中:M表示制動力矩;m表示摩擦因子;d表示制動裝置的直徑。
如果制動的間隙過大,會造成彈簧的壓緊力不足,從而使制動力矩降低,不能在規(guī)定的時間內(nèi)正常制動,此時既可判定升降機的制動出現(xiàn)故障問題。如果在制動過程中,由于間隙的非均勻性,造成摩擦系數(shù)發(fā)生了變化,那么制動扭矩將會產(chǎn)生一個很大波動。所有的彈簧均為充分伸展,其彈簧壓力可視為不變。中間制動力矩的差異和變化,可以用來描述中間制動力矩的變化情況。
4? ?實例應用分析
為對本文提出的檢測方法應用適應性進行檢驗,以某建筑施工項目為依托,針對該項目中建筑井道結(jié)構(gòu)中的曳引式升降機制動是否存在故障問題進行檢測。
4.1? ?建筑井道曳引式升降機結(jié)構(gòu)
建筑井道曳引式升降機可調(diào)節(jié)的導管主要是由三部分組成,即中間套管,伸縮導管,調(diào)節(jié)螺絲組成。使用無縫管制成,兩個端部的伸縮管直徑略小于中間套,插入中間套的凹槽內(nèi),可進行伸縮量調(diào)整(調(diào)整精度為50mm),并通過插腳進行定位。主楞一端配有微調(diào)螺桿,套在伸縮管的凹槽內(nèi),用于螺紋調(diào)整,調(diào)節(jié)間距為50mm。
4.2? ?制動故障檢測流程
在明確建筑井道內(nèi)曳引式升降機與其他結(jié)構(gòu)的基本組成后,利用本文上述提出的檢測方法,按照下述大致流程實現(xiàn)對該曳引式升降機制動故障的檢測。
首先,將曳引式升降機升起,使曳引機垂直于升降機。在升降機下降的同時,將曳引機軸橫移,并將其插入連桿套管內(nèi)。
其次,制動線圈被電釋放,讓負載馬達帶動慣性飛輪運轉(zhuǎn)到800r/min的規(guī)定速度。
再次,將電磁式制動線圈拆下,使制動片在彈簧的作用下,將制動片擠壓到摩擦片制動裝置上。
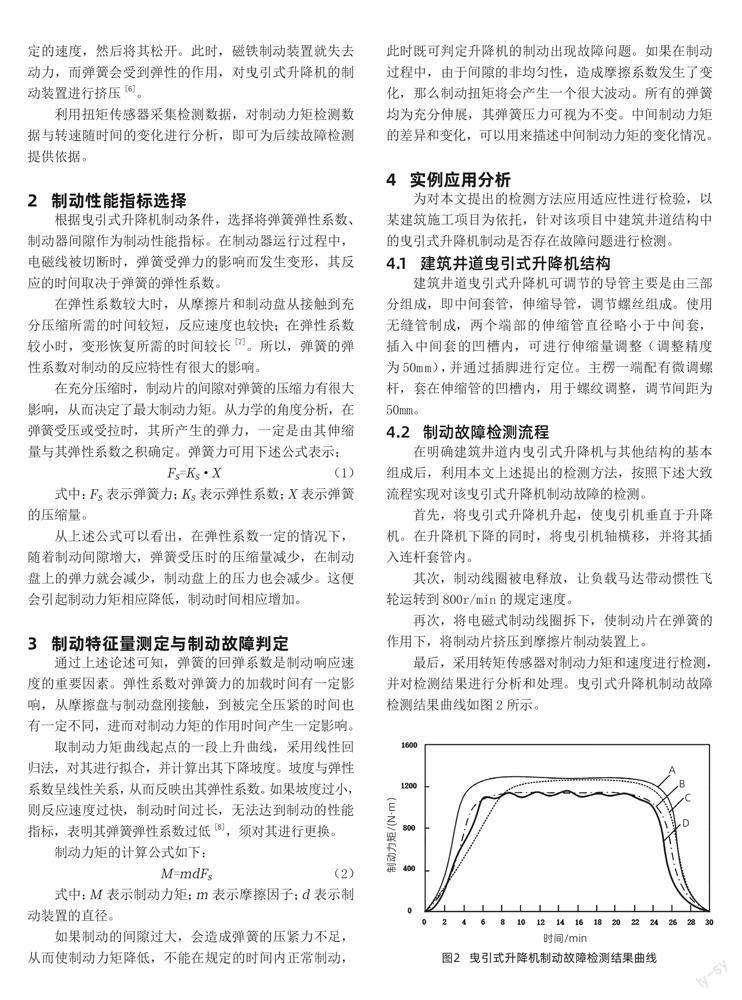
最后,采用轉(zhuǎn)矩傳感器對制動力矩和速度進行檢測,并對檢測結(jié)果進行分析和處理。曳引式升降機制動故障檢測結(jié)果曲線如圖2所示。
4.3? ?制動力矩相關參數(shù)計算
4.4? ?檢測結(jié)果分析
結(jié)合上述檢測結(jié)果曲線與表1中的內(nèi)容,對4條曲線對應的曳引式升降機制動故障檢測結(jié)果進行分析。
曲線A為曳引式升降機在制動正常情況下產(chǎn)生的制動力矩曲線,通過計算得出的各項數(shù)值,均在標準范圍內(nèi),對應的升降機制動性能正常。
曲線B與曲線A相比,平均制動力矩值過低,因此說明該曲線對應的曳引式升降機制動存在摩擦盤與制動盤之間間隙較大的問題。
曲線C與曲線A相比,其上升斜率較低,值和值也普遍偏低,因此說明該曲線對應的曳引式升降機制動彈簧彈性系數(shù)較小,需要更換彈簧結(jié)構(gòu);
曲線D與曲線A相比,其值和值都過大,說明該曲線對應的曳引式升降機制動力矩波動較大,制動裝置的間隙存在接觸不均勻的問題。
通過上述對檢測結(jié)果進一步分析得出,曲線B、曲線C和曲線D對應的曳引式升降機制動性能,均存在不同程度的問題,需要對其進行維護和維修處理。
將本文提出的檢測方法應用實際,不僅可以實現(xiàn)對曳引式升降機制動是否存在故障問題的判定,同時能夠根據(jù)檢測結(jié)果得出產(chǎn)生故障的具體原因,對于建筑井道曳引式升降機的調(diào)整具有十分重要的指導意義。
5? ?結(jié)束語
本文以建筑井道曳引式升降機為研究對象,提出了一種全新的制動故障檢測方法,并通過實例應用的方式完成了對該檢測方法應用可行性驗證。
在實際應用中,可以通過本文提出的檢測方法直接判定曳引式升降機的故障,并得到精準的檢測結(jié)果,實現(xiàn)對具體故障類型的診斷。
根據(jù)檢測結(jié)果,對不符合要求的曳引式升降機進行及時、有效地調(diào)整,有利于確保曳引機制動的安全性和穩(wěn)定性,保障建筑井道曳引式升降機的安全運行。
參考文獻
[1] 陳國棟,林愉翔,趙志峰,等.基于改進YOLO v3的施工升降機螺栓狀態(tài)檢測研究[J].貴州大學學報(自然科學版),2022,39(6):81-86+124.
[2] 李曉英,楊曦,楊柳,等.位于后澆帶上方鋼結(jié)構(gòu)施工升降機基礎施工技術[J].建筑技術開發(fā),2022,49(22):55-57.
[3] 夏順俊,趙俊,張仁強,等.基于有限元方法的500 kV江陰長江第二跨越塔組塔傾斜式升降機運輸?shù)趸\結(jié)構(gòu)校核[J].?能源與環(huán)保,2022,44(5):293-297+305.
[4] 趙俊,張仁強,夏順俊,等.特大型輸電線路大跨越塔組塔傾斜式升降機導軌結(jié)構(gòu)快速校核[J].能源與環(huán)保,2022,44(4):251-257.
[5] 陳希,方萬剛,趙樂,等.高層住宅建筑施工用施工升降機防護與通道翻板一體化施工技術[J].建筑技術開發(fā),2021,48(21):33-35.
[6] 趙秉鑫,盧寧,鹿開旭,等.基于模糊PID的升降機層門聯(lián)動裝置建模與仿真研究[J].機電工程,2021,38(8):1038-1044.
[7] 孫戰(zhàn)強,王治江.一起電梯曳引鋼絲繩脫槽斷股故障原因分析[J]. 特種設備安全技術,2021(3):28-29.
[8] 葉亮.電梯曳引機制動力矩在線檢測臺的研制[J].中國特種設備安全,2021,37(8):10-12+16.
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
文苑(2020年10期)2020-11-07 03:15:36
現(xiàn)代裝飾(2020年6期)2020-06-22 08:43:12
現(xiàn)代裝飾(2020年4期)2020-05-20 08:55:08
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:16
藝術家(2017年3期)2018-01-26 08:54:49
文學自由談(2016年3期)2016-06-15 13:01:16
福建農(nóng)業(yè)科技(2016年10期)2016-03-07 09:46:49
少兒科學周刊·兒童版(2015年6期)2015-11-24 03:49:38
中國工程咨詢(2015年4期)2015-02-14 03:49:56
