Android智能手機聯合高度角與信噪比的GPS/BDS定位隨機模型研究
2023-10-19 13:31:48葉世榕夏朋飛許曉東
大地測量與地球動力學 2023年11期
張 拓 葉世榕 夏朋飛 許曉東
1 武漢大學衛星導航定位技術研究中心,武漢市珞喻路129號,430079 2 航科院(北京)科技發展有限公司,北京市光熙門北里甲31號,100028
隨著移動互聯網技術的迅速發展,越來越多的場景需要使用位置服務,定位功能逐步成為智能手機的重要功能。智能手機的定位方式有基站定位、全球導航衛星系統(global navigation satellite system, GNSS)以及多種傳感器組合的融合定位等,目前室外定位的主要方法為GNSS定位。早期Android智能手機僅支持直接輸出經緯度和高程等位置信息,其定位精度較差,即使在觀測條件良好的情況下,定位精度也僅為5~10 m[1],難以滿足實際需求。2016年起,谷歌公司在Android 7.0及以上版本設備上開放了可以獲取GNSS原始觀測值的應用程序接口(application programming interface, API)[2],開發者可以通過調用API實時獲取Android智能手機的GNSS偽距、載波相位、多普勒等原始觀測值數據,這使得智能手機的高精度定位成為可能。
GNSS觀測值質量是影響定位精度的主要因素,國內外許多學者對智能手機GNSS原始觀測值質量進行研究,結果表明,智能手機信噪比較低,其與衛星高度角的相關性也較差,需要采用新的隨機模型對觀測值進行定權[3-5]。與此同時,部分學者也采用各種方法對智能手機GNSS定位性能進行評估。在單頻PPP解算中,一般采用經驗模型來改正電離層和對流層延遲,其定位精度達到亞米級;在雙頻PPP解算中,靜態定位精度達dm級,動態定位精度達m級[6-7]。總體上看,PPP定位精度和收斂時間不太理想。
因此,本文擬采用Xiaomi 8智能手機,首先對其GPS/BDS偽距觀測值數據質量進行分析,并確定一個精確且通用的隨機模型,通過SPP解算驗證其效果,同時引入國際GNSS服務組織(international GNSS service,IGS)發布的全球電離層格網模型(GIM)產品和Saastamoinen模型,對單頻PPP估計中的電離層和對流層參數進行約束,以提高定位精度和縮短定位時間。
1 Android智能手機原始觀測值獲取
在Android 7.0及以上版本中,可通過GNSSClock和GNSSMeasurement類中相關字段來計算GNSS時間、偽距、載波相位和多普勒等觀測值,相關字段如表1和表2所示[2]。
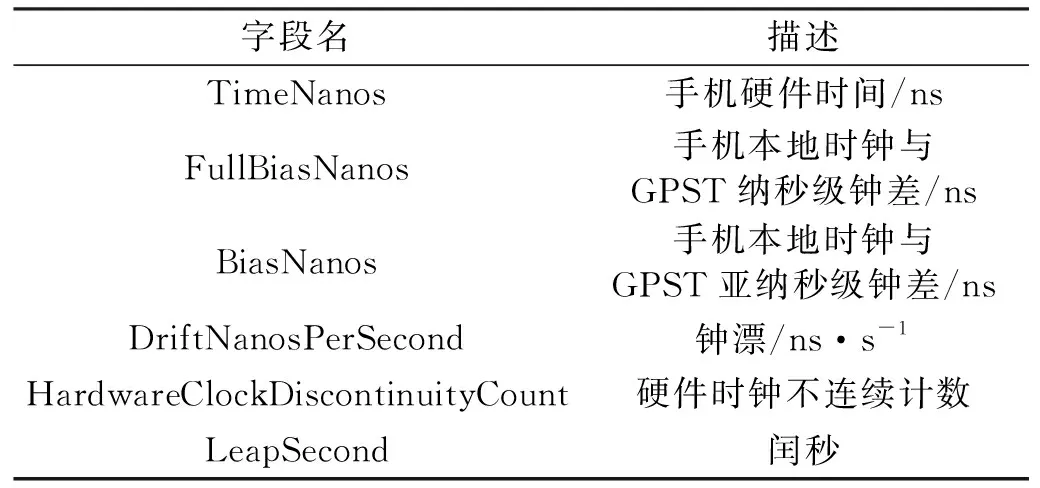
表1 GNSSClock類相關字段Tab.1 Relevant fields of GNSSClock class
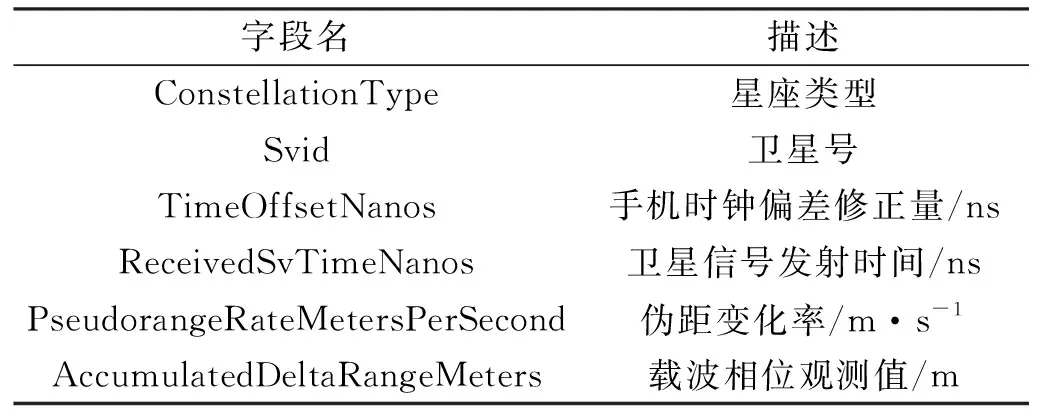
表2 GNSSMeasurement類字段Tab.2 Relevant fields of GNSSMeasurement class
GPS參考時間為:
GPSTime=TimeNanos-
(FullBiasNanos+BiasNanos)
(1)
偽距觀測值為:
P=(tRx-tTx)×10-9×c
(2)
式中,c為光速,tRx為信號接收時間,tTx為信號發射時間:
tTx=ReceivedSvTimeNanos
(3)
tRx=TimeNanos+TimeOffsetNanos-
(FullBiasNanos+BiasNanos)
(4)
由于手機鐘差不穩定,手機本地硬件時鐘與GPST的差值會隨時間發生變化,為保證時鐘偏差的一致性,在計算各歷元tRx時,應使用初始歷元的FullBiasNanos和BiasNanos值代入計算[8]。
載波相位觀測值為:
L=AccumulatedDeltaRangeMeters
(5)
多普勒觀測值為:
(6)
式中,λ表示載波波長。
2 智能手機GNSS定位基本原理
2.1 隨機模型
在GNSS數據處理中,較常用的隨機模型主要有衛星高度角模型、信噪比模型。本文同時考慮衛星高度角和信噪比對觀測值質量的影響,提出一種聯合衛星高度角和信噪比的隨機模型。
2.1.1 高度角模型
一般而言,衛星高度角越低的觀測值,受到的大氣延遲和多路徑干擾越嚴重,其信號質量也就越差,可將衛星高度角與觀測值噪聲方差σ2建立函數模型,本文采用最為常用的三角函數模型[9]:
(7)
式中,el為衛星高度角,a和b為擬合常數。
2.1.2 信噪比模型
信噪比可表征衛星信號強度,能在一定程度上反映衛星信號的質量水平,因此可根據觀測值信噪比來確定觀測值噪聲方差σ2[9]:
(8)
式中,SNR為觀測值信噪比,a和b為擬合常數。
2.1.3 聯合高度角與信噪比模型
鑒于衛星高度角和觀測值信噪比均可能對觀測值質量造成影響,因此本文同時考慮衛星高度角與觀測值信噪比,建立聯合高度角與信噪比模型:
(9)
式中,el為衛星高度角,SNR為觀測值信噪比,a、b、c為擬合常數。
2.2 函數模型
目前,大多數智能手機只支持單頻GNSS信號接收,只有少量智能手機支持雙頻衛星信號,因此本文采用單頻PPP定位模型,同時將電離層和對流層延遲作為待估參數,并分別使用全球電離層格網模型(GIM)產品和Saastamoinen模型計算的電離層和對流層延遲改正數作為大氣估計參數的約束條件[10],模型表達示為:
(10)

3 實驗結果與討論
3.1 實驗數據說明
選取某大樓樓頂作為數據采集地點,該處環境開闊,觀測條件良好。智能手機設備采用Xiaomi 8手機,該設備搭載博通BCM47755芯片,可以提供GPS、GLONASS、BDS和Galileo四個系統L1頻率上的觀測數據,同時支持GPS和Galileo系統L5和E5a頻率上的觀測數據。為進行對比分析,在智能手機附近使用測量型接收機Septentrio PolaRx5進行同步觀測,兩者數據采樣間隔均為1 s。其中智能手機參考位置提前由測量型接收機進行高精度測量獲得。實驗數據采集日期為2022-06-26,為保證實驗的可靠性,采集2段實驗數據進行分析。
3.2 偽距觀測數據質量分析
本文通過智能手機與接收機站間單差方法來分析評估智能手機的偽距觀測數據質量。在差分觀測值中利用智能手機和接收機的參考位置改正站間位置差異,然后通過均值估計站間鐘差并進行改正,剩余部分則為偽距噪聲和多路徑誤差。由于接收機偽距噪聲遠小于智能手機,因此可認為經過改正后的偽距殘差主要為智能手機偽距噪聲[11]。
圖1為智能手機偽距殘差情況,可以看出,絕大部分衛星的殘差在10 m以內,但是部分衛星偽距殘差較大,甚至達到60 m。圖2為偽距殘差與高度角和信噪比的關系,由圖可知,隨著高度角增加或信噪比增大,偽距殘差均呈現方差逐漸減小的趨勢。分別計算偽距殘差與高度角和信噪比的相關系數,前者為-0.81,后者為-0.90,說明偽距殘差方差與高度角和信噪比均存在極強的負相關性,且與信噪比的相關性更強于與高度角的相關性。由于信噪比和衛星高度角均會影響觀測值精度,因此在對衛星觀測值進行定權時,同時考慮信噪比和高度角因素更為合理。圖3為智能手機GPS和BDS衛星偽距殘差對比,可以看出,GPS衛星偽距殘差主要分布在10 m以內,BDS衛星偽距殘差主要分布在5 m以內,BDS衛星偽距觀測值質量明顯優于GPS,因此對于不同導航系統衛星,其隨機模型應該分開確定。
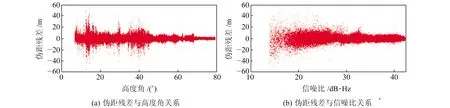
圖2 智能手機偽距殘差與高度角和信噪比關系Fig.2 Correlation of pseudorange residuals with elevation angle and SNR of smartphone
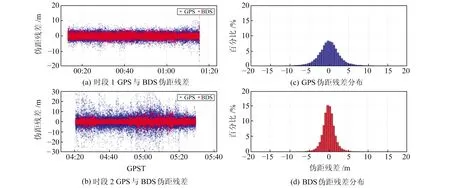
圖3 智能手機GPS與BDS偽距殘差對比Fig.3 Comparison of GPS and BDS pseudorange residuals of smartphone
3.3 定位結果驗證
3.3.1 偽距單點定位
本文采用高度角模型、信噪比模型和聯合高度角與信噪比模型這3種隨機模型分別進行SPP計算,通過定位精度來比較隨機模型的效果。實驗前對3種隨機模型的擬合系數進行標定,考慮到GPS與BDS衛星觀測數據質量不一致,因此標定時對GPS和BDS衛星分開擬合模型系數,表3為3種隨機模型的擬合系數。由于時段2偽距質量情況更為復雜,更能表現隨機模型的效果,因此采用時段2數據進行SPP計算。SPP觀測數據采用單頻GPS/BDS數據,衛星軌道和鐘差采用廣播星歷軌道和鐘差數據,電離層延遲和對流層延遲分別采用Klobuchar模型和Saastamoinen模型進行改正,地球自轉及相對論效應等誤差采用相應模型進行改正,參數估計采用最小二乘估計方法。
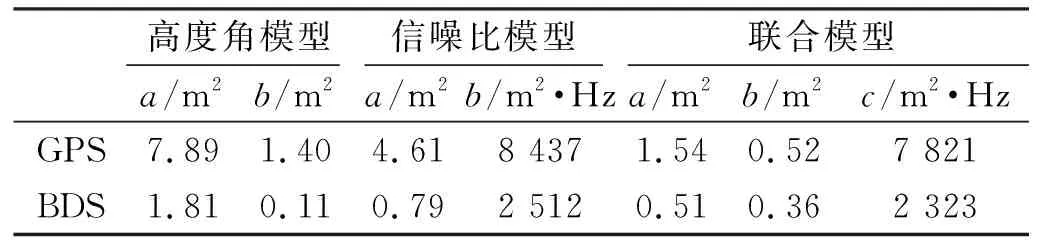
表3 3種隨機模型擬合系數Tab.3 Fitting coefficients of the three stochastic models
圖4和圖5分別為3種隨機模型在E、N、U方向上的定位誤差對比和累積分布。可以看出,高度角模型定位精度最差,聯合模型定位精度略優于信噪比模型。表4為3種隨機模型定位結果的RMS,可以看出,高度角模型定位精度最差,在E、N、U方向上的定位精度分別為3.57 m、4.85 m、8.60 m;信噪比模型在3個方向上的定位精度分別為2.64 m、4.40 m、7.71 m,比高度角模型定位精度分別提高26%、9%、10%;聯合模型在3個方向上的定位精度分別為2.53 m、4.19 m、7.53 m,比高度角模型定位精度分別提高29%、14%、13%。聯合高度角與信噪比隨機模型優于單一因素隨機模型。
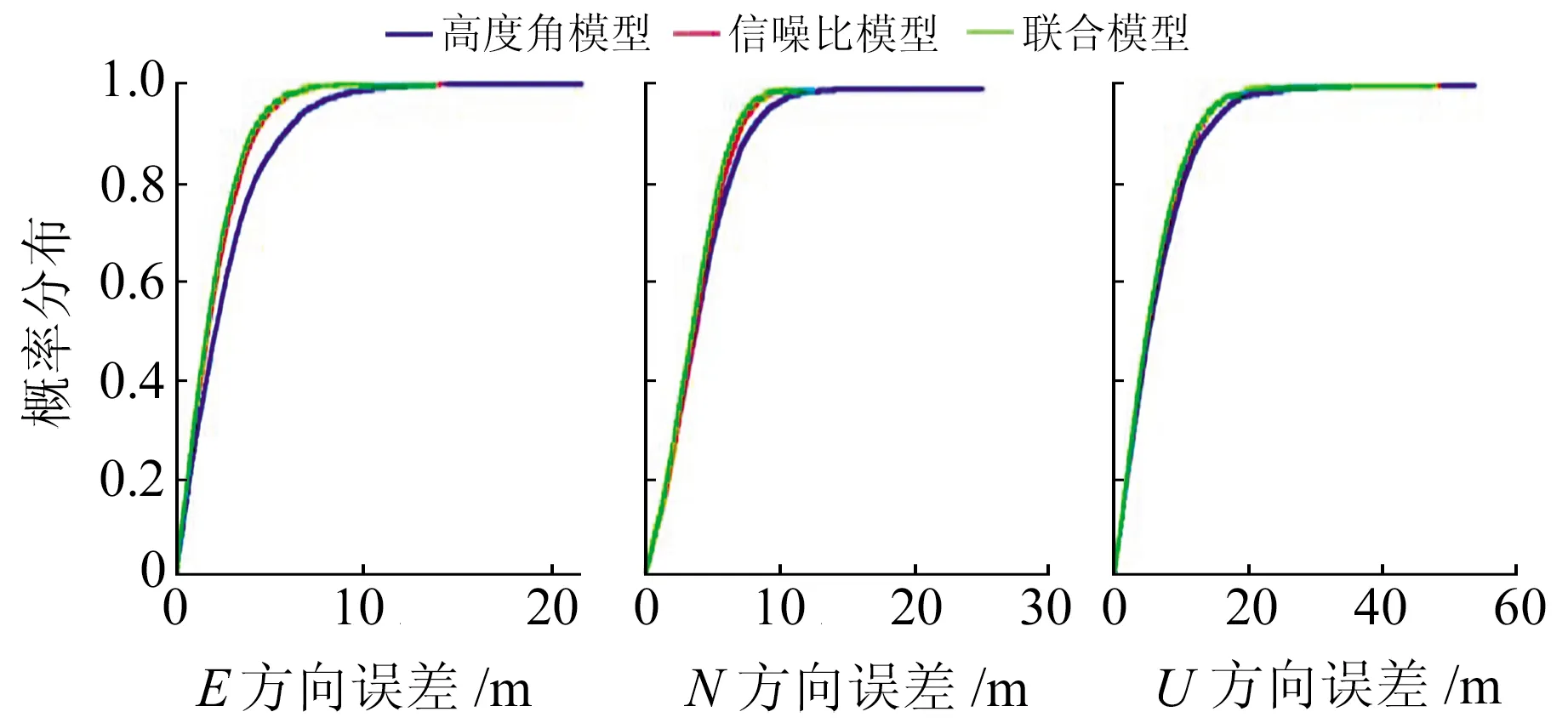
圖5 3種隨機模型定位誤差累積分布Fig.5 Cumulative distribution of positioning errors of the three stochastic models
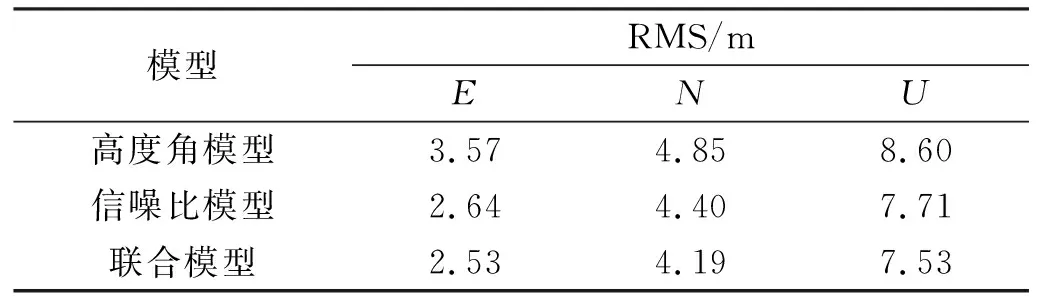
表4 3種隨機模型定位精度Tab.4 Positioning accuracy of the three stochastic models
3.3.2 單頻GNSS-PPP定位結果
由于智能手機雙頻可見衛星數量稀少且智能手機噪聲較大,因此PPP函數模型采用單頻PPP非差非組合模型,PPP隨機模型分別采用高度角模型、信噪比模型和聯合高度角與信噪比模型進行計算。在PPP定位中,觀測數據采用單頻GPS/BDS數據,軌道和鐘差采用國際GNSS服務組織(IGS)發布的事后精密軌道和鐘差產品,電離層延遲和對流層延遲分別附加參數進行估計,相位纏繞、地球自轉等誤差采用對應模型進行改正,衛星端偽距硬件延遲采用IGS發布的差分碼偏差(DCB)產品進行改正,其他誤差則在進行PPP浮點解算時被相應參數吸收。由于需要估計大氣誤差參數,估計參數較多,收斂緩慢,因此引入外部的大氣產品和模型對大氣參數估計進行約束。對于電離層延遲參數,采用IGS發布的全球電離層格網模型產品進行約束,該產品可預報2 d,預報產品精度約為0.5 m[12];對于對流層延遲參數,采用Saastamoinen模型進行約束,該模型精度約為0.1 m。
表5為2段數據分別采用3種隨機模型進行PPP計算的定位結果。從定位精度來看,時段1數據聯合模型的定位精度相比于另外兩種模型在水平和高程方向上提高約5 cm,時段2數據由于偽距質量情況更為復雜,聯合模型的定位精度提升效果更加明顯,在水平方向上提高數cm,高程方向上提高2~3 dm。從收斂時間來看,由于時段1數據偽距質量優于時段2,因此時段1數據3種模型定位結果的收斂速度均優于時段2,對于同一段數據,聯合模型定位結果的收斂速度明顯快于高度角模型和信噪比模型。可以看出,聯合模型在定位精度和收斂時間上均優于另外兩種隨機模型。
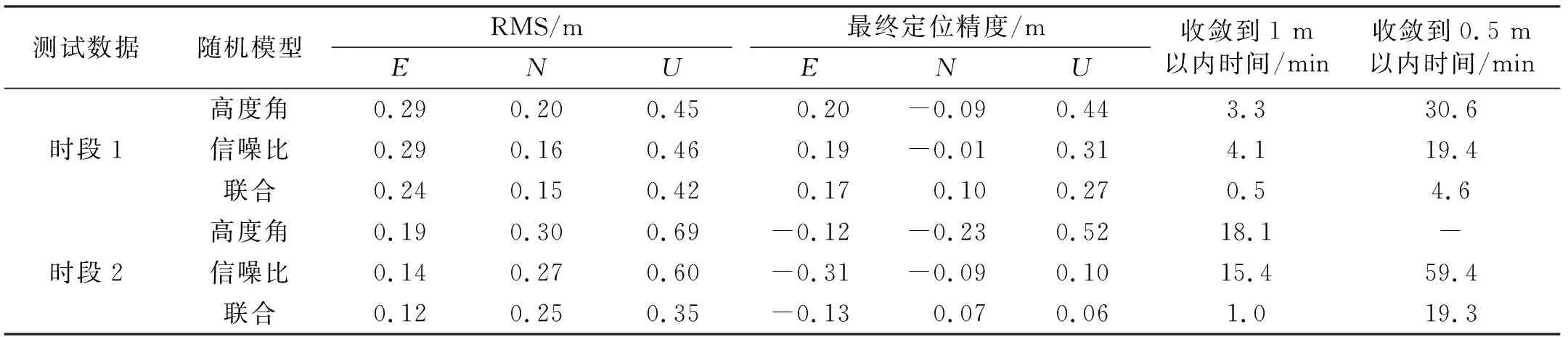
表5 PPP定位結果Tab.5 PPP results
圖6為聯合高度角與信噪比模型PPP定位誤差。由圖可知,時段1數據PPP定位誤差收斂迅速,在0.5 min收斂到1 m以內,5 min定位誤差收斂到0.5 m以內,E、N、U三個方向上RMS分別為0.24 m、0.15 m、0.42 m。時段2數據PPP定位誤差收斂稍慢,水平定位誤差在0.1 min收斂到1 m以內,約1.1 min收斂到0.5 m以內,但在高程方向上收斂到1 m需要1 min,收斂到0.5 m則需要約19.3 min。時段2數據E、N、U方向上RMS分別為0.12 m、0.25 m、0.35 m。兩段數據最終的定位精度在水平方向上均優于0.2 m,高程方向上均優于0.3 m。以上結果表明,在后處理模式中,智能手機單頻PPP可以在較短時間內實現dm級定位結果。
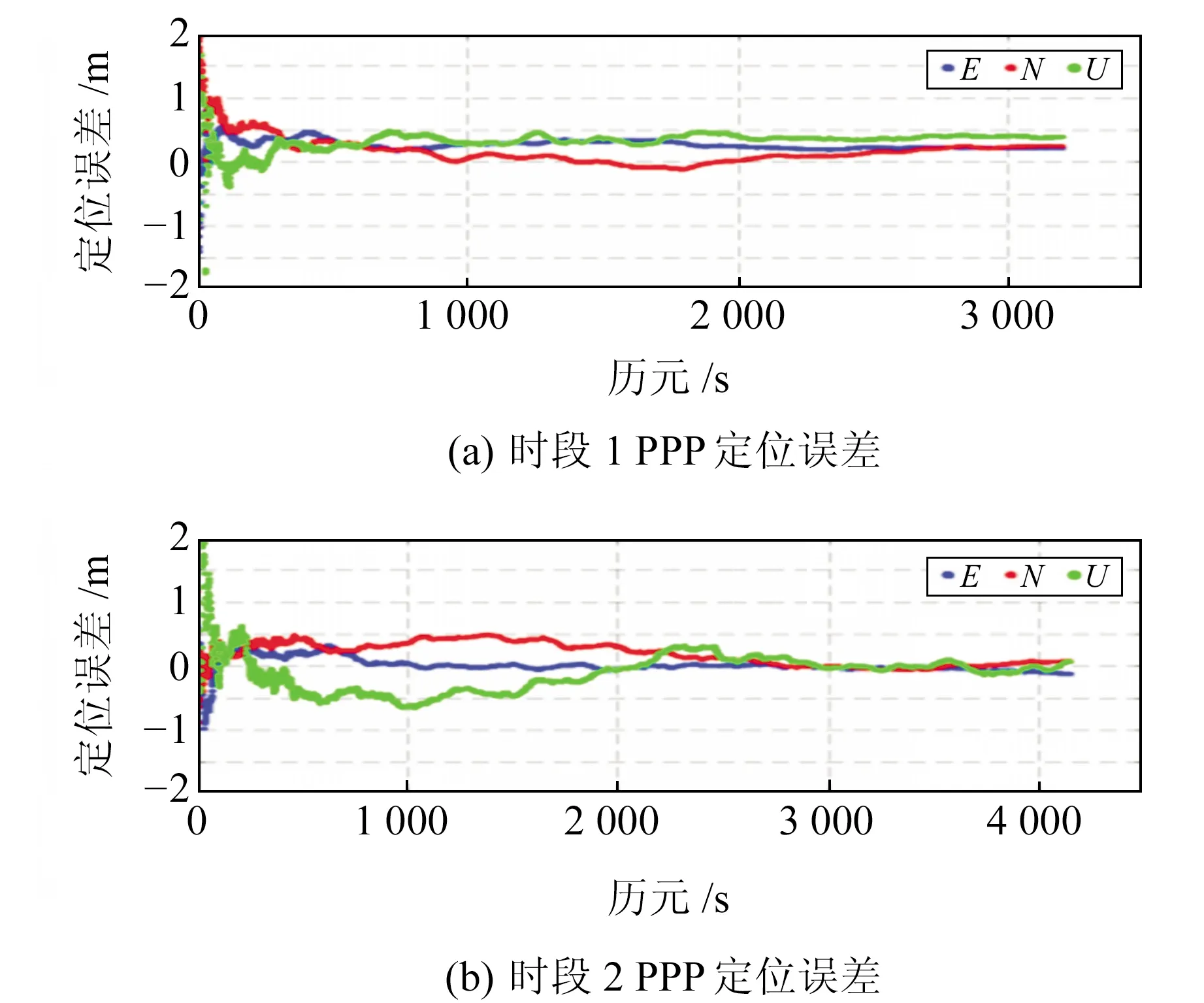
圖6 智能手機聯合模型PPP定位誤差Fig.6 PPP error of smartphone with stochastic model
4 結 語
本文通過Xiaomi 8智能手機獲取原始觀測值,對智能手機偽距觀測數據質量進行分析,通過計算智能手機偽距殘差方差與衛星高度角和觀測值信噪比的相關系數發現,智能手機偽距殘差與高度角和信噪比均具有較強的相關性,采用聯合高度角與信噪比的隨機模型更為合理;同時,智能手機BDS衛星偽距殘差明顯小于GPS衛星,不同導航系統衛星的隨機模型需要分開確定。基于智能手機實際數據,分別采用SPP及單頻PPP模型,對聯合高度角和信噪比模型、高度角模型、信噪比模型的定位性能進行比較分析。結果表明,在SPP定位模式下,聯合高度角與信噪比模型的定位精度優于單一因素模型,在單頻PPP模式下,聯合模型的定位精度和收斂時間均優于單一因素模型。在附加電離層和對流層約束的單頻PPP后處理解算模式下,智能手機1 min定位精度可收斂至1 m以內,5 min水平方向定位精度優于0.5 m,最終水平方向和高程方向定位精度分別優于0.2 m和0.3 m,表明智能手機后處理可以快速實現dm級定位。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
紅領巾·萌芽(2022年9期)2022-11-24 05:55:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
英語文摘(2020年5期)2020-09-21 09:26:30
數學物理學報(2020年2期)2020-06-02 11:29:24
趣味(語文)(2018年8期)2018-11-15 08:53:00
海外星云(2016年7期)2016-12-01 04:18:00
光學精密工程(2016年6期)2016-11-07 09:07:19
樂活老年(2016年10期)2016-02-28 09:30:37
核科學與工程(2015年4期)2015-09-26 11:59:03