礦用帶式輸送機視覺安全防護系統研究與應用
2023-10-19 10:34:52姚紅帥
山東煤炭科技 2023年9期
姚紅帥
(西山煤電(集團)有限責任公司大數據中心,山西 太原 030053)
1 概況
杜兒坪煤礦設計年開采量為385 萬t,可采煤層7 層,煤層總厚度18.78 m。目前對20334 工作面進行綜采作業,隨著開采作業效率的提升,當前采用的DSJ70 型帶式輸送機載重、運輸速度等作業負荷不斷增加。作為井下作業關鍵設備,僅2021年5 月就因輸送大塊矸石、大塊煤塊導致輸送帶縱向撕裂兩次,且在綜采作業期間,出現過三次因堆煤導致輸送機機架變形情況,雖然巡檢人員及時發現問題并進行修復,但作業效率大受影響。基于此,采用機器視覺的圖像檢測技術進行礦用帶式輸送機安全防護系統研究,實時高效檢測輸送皮帶存在的大塊物料、堆煤以及機頭位置人員入侵情況,對保證井下帶式輸送機安全穩定運行[1],確保煤礦安全開采作業具有重要現實意義。
2 系統整體架構設計
針對杜兒坪煤礦帶式輸送機運行期間大塊物料以及人員入侵等危險因素監測實際需求,設計的基于視覺帶式輸送機安全防護系統共包含四大子系統:視覺信息采集系統、信息交互系統、視覺信息處理系統以及連鎖控制系統。1)視覺信息采集系統主要由圖像捕捉設備、輔助燈光設備以及電源設備等構成,針對大塊物料、堆煤、人員入侵等配置獨立防爆攝像機完成畫面采集[2],實時穩定采集帶式輸送機不同角度畫面數據;2)信息交互系統主要實現視覺信息采集系統與信息處理系統的數據傳輸,核心設備是井下防爆交換機、傳輸光纖和網線[3];3)視覺信息處理系統是安全防護系統的核心,完成視覺采集信息的顯示、儲存、分析處理以及管理,能夠精準識別圖像信息中存在的危險元素,按照程序設定進行報警或控制帶式輸送機運行狀態等連鎖動作;4)連鎖控制系統包含了控制板卡、報警裝置等設備,能夠根據視覺信息處理系統的識別結果進行報警或控制帶式輸送機啟停。礦用帶式輸送機視覺安全防護系統整體架構如圖1。
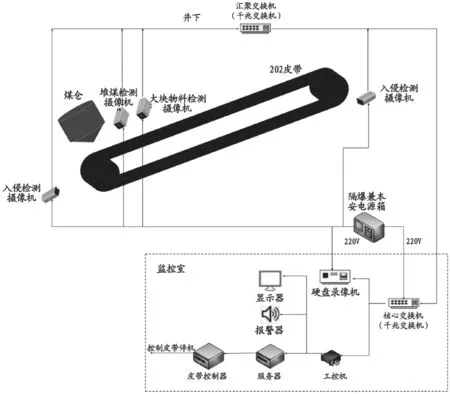
圖1 帶式輸送機視覺安全防護系統架構圖
3 系統硬件選型
3.1 防爆監控裝置
系統識別圖像采集通過防爆攝像機完成,拍攝帶式輸送機實時狀態畫面作為原始信息,通過分析系統信息處理識別出是否存在大塊物料、堆煤或人員入侵等危險情況發生。攝像裝置的選型主要考慮了工況環境、信息傳輸方式、畫面采集頻率以及畫面識別分辨率等[4],系統選配了KBA-127B 型防塵防爆型光纖高清攝像機,具有煤安認證,滿足井下設備國家標準要求,性能參數見表1。該型攝像機的幀率為35 fps,系統對視覺圖像的處理能力要大于該型攝像機拍攝幀率,保證系統信息處理的無延遲性和可靠性[5]。
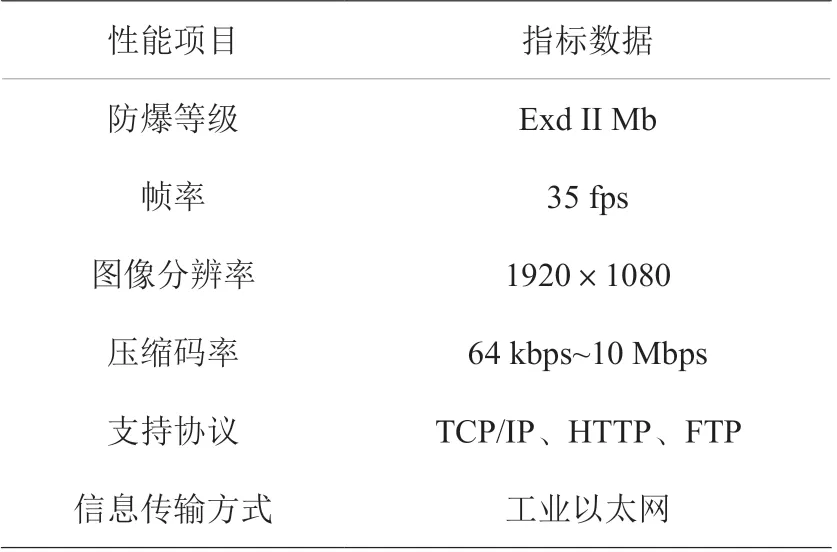
表1 KBA-127B 型防塵防爆型光纖高清攝像機性能參數表
3.2 防爆交換機
基于視覺圖像采集幀率與分辨率參數,為了保證信息數據傳輸效率,系統選用KJJ12 型千兆交換機進行數據通信和信息交互。交換機實際帶寬為理論帶寬60%時,能保證傳輸效率[6],而攝像設備最大壓縮碼率為10 Mbps,系統共配置了12 臺攝像設備,因此千兆交換機帶寬能滿足系統需求。該型交換機防爆等級為Exib I,端口數為2 路光信號端口、3 路485 信號端口。
3.3 控制板卡
為了實現系統能夠根據視覺信息處理系統結果按照設定程序進行報警或帶式輸送機連鎖控制等功能,系統選配PCI1761 型控制板卡進行信息輸出。該型板卡具有8 路數字隔離輸入和8 路繼電器輸出,支持Win7、Win10 和Linux 系統,能夠使用C#、C++、LabVIEW、Java 等語言進行編程,配合工控機完成程序控制。
3.4 工控機
作為處理系統的核心,要求具有足夠的圖像信息處理能力和優秀的數據傳輸系統,能夠對攝像機采集的圖像信息無延遲、無卡頓地進行識別,選用東田工控開發的IPC-24605-IH310MB 型工控機,與控制板卡通過PCI 卡槽連接,性能數據見表2。
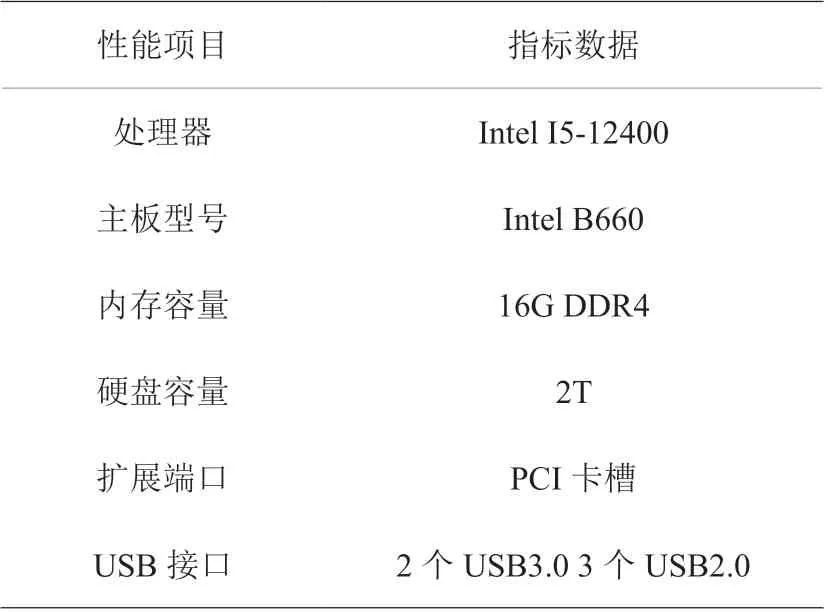
表2 IPC-24605-IH310MB 型工控機性能參數
4 系統軟件設計
系統軟件平臺依托前端視覺信息采集設備、信息傳輸通信裝置以及視覺監測算法,配合功能模塊實現帶式輸送機運行狀態顯示、異常運輸與人員入侵識別、緊急情況報警、連鎖控制帶式輸送機啟停、信息統計與記錄等功能。系統軟件平臺以功能模塊設計理念進行構建,包含異常檢測模塊、信息顯示模塊、數據管理模塊、報警控制模塊和系統設置模塊,系統檢測算法流程如圖3。系統對大塊物料、堆煤和人員入侵三種安全威脅狀態分別采用了不同的檢測算法,其中大塊物料檢測是基于深度學習的目標檢測算法,而其他兩種狀態檢測則是基于目標的圖像特征,區別在于人員入侵是利用多幀圖像經過時差對比判定,而堆煤是采用單張圖片完成判定。

圖3 系統軟件算法流程圖
1)異常檢測模塊
異常檢測模塊實時監測帶式輸送機運輸狀態與環境安全,是系統的主要功能模塊,通過對大塊物料、堆煤、人員入侵等異常狀態圖像識別與算法系統訓練完成樣本庫建立,通過與樣本庫數據對比識別不同尺寸圖像、不同位置異常狀態,對設備安全狀態進行判定。另外,該模塊還配置了線激光輔助檢測激光條紋系統進行皮帶撕裂故障檢測、區域面積對比裝置進行跑偏檢測等。
2)信息顯示模塊
信息顯示模塊是系統人機交互的基礎[7],可以為操作人員提供系統視覺監測畫面、帶式輸送機安全故障信息以及系統狀態信息等。系統上位機顯示界面包含七個一級界面,如圖4,分別為:開始監控、添加攝像頭、攝像頭列表、采集報表、監控調試、參數設置以及修改密碼;各一級界面下還配置有二級監測、控制與數據管理界面。除顯示系統監測對象的狀態信息外,信息顯示模塊還對系統本身的數據傳輸狀態、硬件連接狀態以及模塊是否在線等狀態信息配置了查詢界面。

圖4 系統上位機主界面
3)數據管理模塊
該模塊主要通過Mysql 數據庫管理軟件完成相關功能[8],對系統信息采集數據、中間處理數據以及判定結論數據進行管理,實現數據的通信、處理、查詢與統計。用戶可以通過上位機的人機交互系統對系統數據進行修改、增設或刪除,對檢測故障類型和頻次等數據進行查閱與打印。
4)報警控制模塊和系統設置模塊
報警控制模塊根據系統設定的控制邏輯實現監測區域和控制室的聲光報警以及帶式輸送機自動控制啟停功能。系統設置模塊對用戶開放,根據不同的檢測需求手動修改系統參數和用戶管理信息。
5 應用效果分析
將研究的礦用帶式輸送機視覺安全防護系統應用在杜兒坪煤礦,對20334 工作面綜采作業設備DSJ70 型運行狀態進行監測。在監控室發生聲光報警時的實際監測畫面可以看出,運輸皮帶出現大塊物料、堆煤和人員入侵的異常狀態,系統檢測精度與準確度能夠滿足井下帶式輸送機安全運行實際需求。
6 結語
針對杜兒坪煤礦井下帶式輸送機因大塊物料運輸、堆煤導致設備故障問題,進行安全狀態檢測系統設計研究,形成以下結論:
1)安全狀態檢測系統包含視覺信息采集系統、信息交互系統、視覺信息處理系統以及連鎖控制系統。四個子系統通過軟件平臺有機結合,對帶式輸送機的大塊物料、堆煤、人員入侵等異常狀態進行識別、報警,并根據系統程序設定連鎖控制帶式輸送機啟停。
2)對大塊物料、堆煤、人員入侵三種異常狀態監測,系統采用了不同的軟件算法,大塊物料檢測是基于深度學習目標檢測,堆煤采用單張圖像特征完成判定,而人員入侵則利用多幀圖像對比判定。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46