基于數據間支持度的數據融合處理方法研究?
2023-10-20 03:51:22李鵬
艦船電子工程 2023年7期
李 鵬
(92941部隊 葫蘆島 125001)
1 引言
數據融合的概念于20 世紀80 年代由美國提出,最早應用于軍事領域[1~2],數據融合的目的在于提高數據處理精度,掌握數據質量和目標跟蹤狀態。關鍵是建立數據融合處理方案,構建融合模型和引進先進的估計算法[3]。數據融合處理的經典方法包括卡爾曼濾波、加權平均、模糊邏輯、神經網絡、參與估計等[4]。
針對高速彈丸[5]目標在海上射擊時,裝備沿海測量受海面反射、能見度、布站條件等限制較大;高速彈丸低空飛行段測量易受山體、建筑物等遮擋,跟蹤過程中易出現數據穩定性不好的情況;參加測量的裝備類型較多,在測量體制及測量精度上存在較大差異。
根據測量任務實際,以及彈丸目標具有高空高速、目標特性不明顯、不加裝GPS 及遙測系統等特殊性,綜合分析實際測量條件,本文提出一種基于數據間支持度的數據融合算法,充分利用多測量數據源的信息,根據數據間支持程度,動態計算每個測量數據在全體測量數據中的權值系數,完成信息融合計算,得到完整準確的航跡融合結果。
2 信息融合結構模型
數據融合是多層次多級別的數據綜合處理過程[6~7],從多源信息系統的數據流通方式和綜合處理角度出發,彈丸目標航跡信息融合主要是位置級融合,位置級融合結構模型主要有兩種:集中式融合結構、分布式融合結構、混合式融合結構[8]。
集中式融合結構優點在于最大程度地利用了原始測量信息,信息損失小,但對融合數據處理能力要求較高,且當測量數據不穩定時算法流程比較復雜,易造成參數結算及數據關聯困難。混合式融合結構是集中式和分布式的結合,在系統開銷上付出的代價很高,適用于某些特定環境。
經過對測控裝備布站、測量數據精度、目標航路規劃等綜合分析,本系統采用分布式融合結構,優點在于測量信息經局部處理后信息相對穩定,可減輕融合中心的負荷,實時性較強,能夠提高融合結果的穩定性和精度。圖1 為分布式融合結構模型圖。
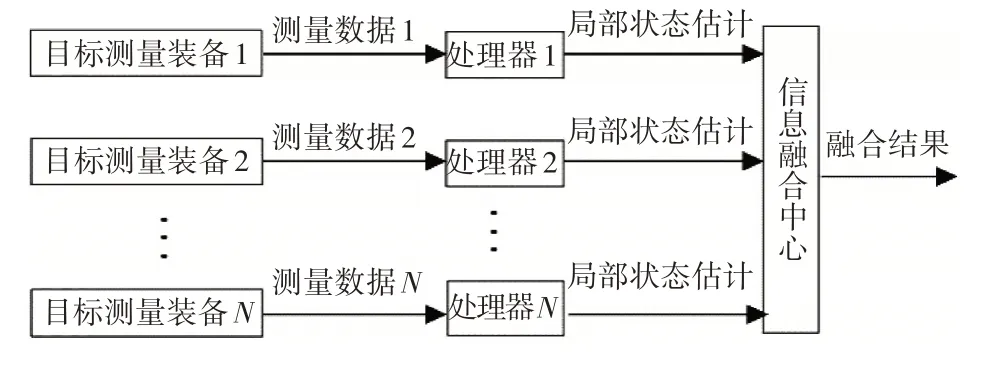
圖1 分布式融合結構模型圖
3 局部狀態估計
3.1 測量數據預處理
受測量環境、裝備操作、天氣等因素影響,測量數據中不可避免的存在野值。數據預處理主要是剔除數據中的粗大野值,并對數據進行補全[9~10]。經對比分析,五點線性預報法對剔除粗大野值簡單有效,算法分為差分檢驗、線性預報兩部分,先用求一階差分和四階差分的方法,對數據進行合理性檢驗,發現并剔除明顯的野值點,再按五點線性預報公式補全。
第一步,對測量信息進行一階差分Δ1yi=yi+1-yi,用四階差分檢驗法進行初始檢驗,找出一組合理點。
第二步,數據四階差分值:
式中,j≥5,取門限M1,判斷 |Δ4j|≤M1是否成立,若是,則為一組合理點,否則,令j=j+1,繼續進行四階差分檢驗。
第三步,用五點線性預報公式進行數據檢擇與修正:從以上求得的五個合理點yj-4,yj-3,yj-2,yj-1,yj為基點,按照線性預報公式計算:
式中,Pi=(3i-7)/10 ,取門限M2,判斷是否滿足,若是,則為合理,否則為野值。
第四步,令yi+1=,j=j+1,繼續四階差分檢驗,對數據進行初始檢驗,找出一組合理點,再繼續利用五點線性預報公式進行檢驗與補點。
3.2 無跡濾波模型
無跡濾波(Unscented Filter,UF)是20 世紀Julier等提出的一種用采樣方法近似非線性分布的非線性濾波方法[11~12],是利用無跡變換(Unscented Transform,UT)在估計點附近確定采樣,用這些樣本點的分布來近似表示非線性函數的分布。
定義非線性系統:
其中,Pv為過程噪聲方差,Pn為測量噪聲方差。
根據采樣策略,得到k 時刻的狀態估計的Sigma點集。
其中,λ為尺度參數,L為增廣向量維數。
更新方程:
4 基于數據間支持度的加權融合計算
該算法的基本原理:各測量數據經野值剔除、時空對齊、平滑濾波等處理得到各自的局部估計后,對各局部估計間的相互支持程度進行計算,據此建立支持度矩陣,并計算每個測量數據在全體測量數據中的權值系數,根據各個權值進行融合計算。為避免外接因素對測量數據的干擾,在實時性允許的條件下,對上述結果再次進行濾波,得到全局狀態估計信息,即最終的加權融合計算結果。
為更好地完成目標測量任務,在目標航路附近布設n 臺測量設備,保證測量數據的冗余性,即同一時刻得到n 個測量數據(x1,x2,…xN),各測量數據經野值剔除、時空對齊、濾波等處理得到各自的局部估計后,計算各測量數據間的相對距離。
式中,的值越大,說明兩個數據間的差別就越大;的值越小,則數據間的差別越小。根據計算結果建立相對距離矩陣,即:
根據數據支持度性質可知,數據對自身的支持度函數的值為1。由函數表達,可知值越小,說明數據間差別就越小,支持度函數值就越大,支持度就高;越大,說明數據間差別就越大,支持度函數的值就越小,支持度就低;當取得最大值時,支持度函數值為零。可見,?[0 ,1] 的取值為[0,1]。
據此,建立支持度函數矩陣,可表示為
矩陣中的數據代表了兩兩數據間的相互支持程度,但無法說明某一數據相對于整體而言的總支持度。需要計算每個數據的權值,用于完成融合計算。
設存在一組非負數:(a1,a2,…an)使得
矩陣形式可表示為
其中,W=[w1(k),w2(k),…wn(k)]T,A=[a1a2…an]T。
支持度矩陣是一個非負矩陣,存在最大模特征值λ≥0,通過l*A=R(k) *A可求得最大模特征值的特征向量A,從而求得每個數據權值,表示為
由此可得到加權融合結果,即:
為避免外接因素對測量數據的干擾,在實時性允許的條件下,對上述結果再次進行濾波,得到最終的加權融合計算結果。
5 仿真測試驗證
采用仿真手段對融合算法進行測試分析,根據實際測量條件下的裝備布站情況,模擬6 臺雷達測量數據,滿足測量數據在彈丸飛行軌跡全程覆蓋,在不同飛行距離段落內數據質量存在差異。雷達測量數據仿真具體情況如表1 所示,雷達數據仿真曲線及航跡融合結果曲線如圖2所示。
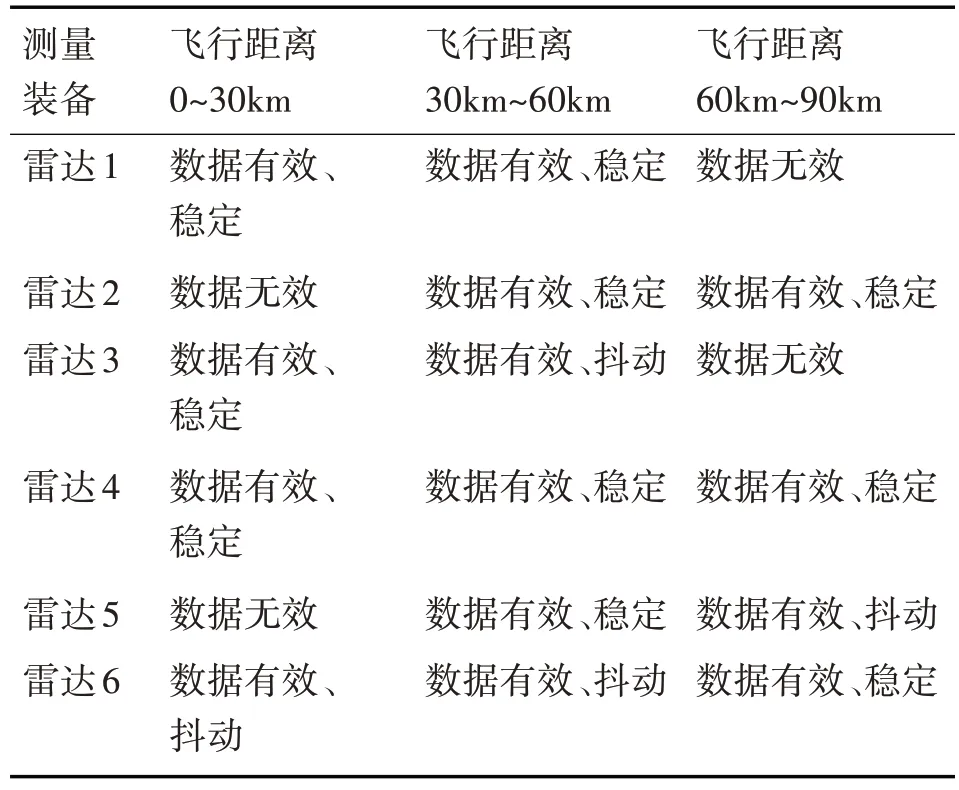
表1 雷達測量數據仿真
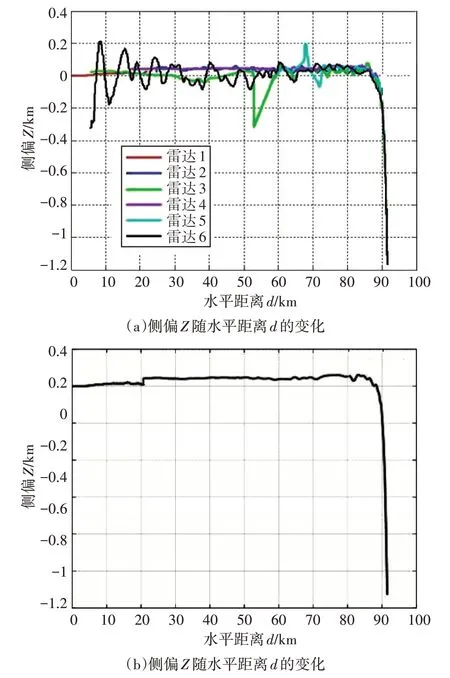
圖2 雷達數據仿真曲線及航跡融合結果曲線
通過仿真結果可知,該融合算法能夠根據測量數據實際情況,在不同飛行段落內有效剔除抖動數據,排除不穩定數據對融合權值系數計算的影響,融合結果曲線抖動較小、連續穩定。
6 結語
本文針對高速彈丸目標在海上射擊時,沿海測量受布站限制、目標特性不明顯、多類型裝備接力測量等實際情況,提出基于數據間支持度的數據融合算法,計算各測量數據間的相互支持程度,有效排除不穩定數據干擾,得到各測量數據的融合權值,完成信息融合計算。通過仿真數據測試驗證,該方法切實可行,能夠得到完整的、穩定的目標航跡信息融合處理結果。并可為遠程目標多類型測量裝備協同工作、接力測量的研究提供參考意義。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45