一種小型化炮彈落點定位系統設計
2023-10-21 06:10:06馬游春張琦琪
電子設計工程 2023年20期
馬游春,張琦琪
(1.中北大學電子測試技術國家重點實驗室,山西太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,山西太原 030051)
在進行靶場測試時,由于炮彈在飛行過程中有大量的飛行數據,需要對測試的炮彈進行回收[1-3]。因此,確定炮彈落點在整個實驗過程中起著至關重要的作用。但是,傳統的尋找炮彈落點的方法主要通過人工搜尋,由于炮彈落點的不確定以及地理位置的遮擋,比如隱藏在灌木叢中或者滲入沙地,都會對人工排查帶來巨大的挑戰,搜尋過程會很困難[4]。在炮彈發射過程中,發射彈道是固定的,飛行過程可能出現偏差,但是飛行方向不會出現較大變化,整個炮彈的落點位置可能為朝前方向的扇形,這就為整個方案設計簡化了步驟。
該文提出了一種快速確定炮彈落點的方法——采用定位模塊和MESH 組網設計確定炮彈落點信息。在炮彈處裝載GPS/北斗雙模定位模塊和無線通信模塊。先在整個炮彈的發射范圍內布滿無線通信模塊,配置相應信息構成MESH 組網模式,在整個炮彈飛行過程中實時定位并以每秒1 次的頻率回傳定位信息,能夠確定整個飛行過程中的位置信息,并可以通過整個飛行過程的定位來確定大致落點位置。同時,還可以在炮彈掉落后實時發送位置信息,方便尋找。結合實際應用背景,由于該信標機需要搭載到炮彈上,對發射端的體積、形狀等具有較高要求。
該設計相較于目前火熱的北斗短報文傳輸定位模式[5],在功耗、成本、設計周期等方面具有較大優勢,而且操作簡單便捷。北斗短報文定位模式是北斗系統所特有的一種定位模式。相比于GPS 定位系統只能單向地將定位信息從衛星發送給定位模塊,北斗短報文可以實現一個雙向的傳輸。這樣對于信標機[6]設計來說,安裝了北斗定位系統的定位模塊,可以將定位信息通過衛星傳輸到任意地方[7],但是,設計過程較為復雜,成本高。綜上,出于成本、體積、功耗等多方面考慮,該設計方法優于北斗短報文設計方法。
1 系統總設計方案
在設計過程中,將定位模塊和無線通信模塊連接到一起,將炮彈飛行過程中的定位信息通過無線通信模塊發送出去,無線通信模塊接收到信息,通過FPGA 進行數據解析,將解析出的數據上傳到上位機。同時,炮彈在飛行過程中,飛到無線通信模塊構成的MESH 組網的范圍內,以炮彈(即炮彈上搭載的發射端)為中心,天線傳輸范圍內的無線通信模塊都會收到定位信息,然后再以第一波接收到定位信息的無線通信模塊為中心,繼續覆蓋傳輸,最終傳輸給終端。該設計分為發射端和接收端,發射端[8]包括定位模塊、無線通信模塊、電源管理模塊以及天線等,接收端模塊包括無線通信模塊、數據處理模塊、電源管理模塊以及天線等。系統總體結構圖如圖1所示。
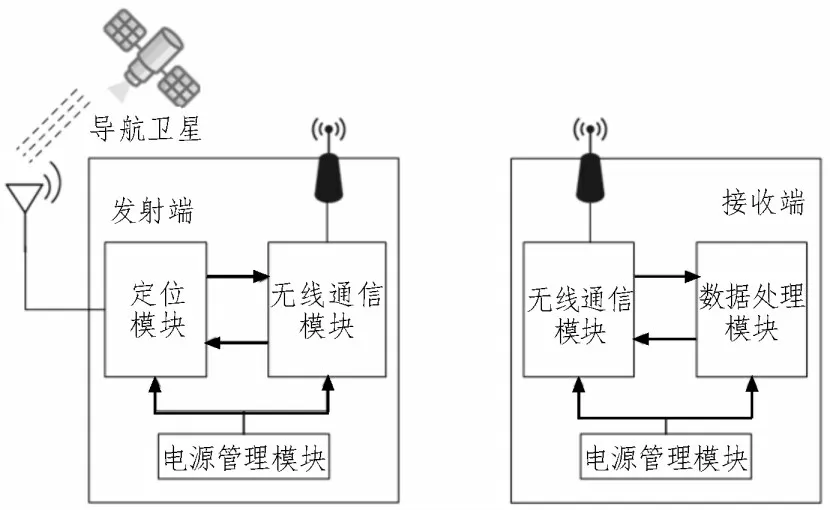
圖1 系統總體結構圖
2 硬件電路設計
2.1 定位模塊
該文選取全星座定位模塊ATGM336H 作為該設計的定位模塊[9],ATGM336H 是一款高性能全星座定位導航模塊,支持多種衛星導航系統,包括中國的BDS(北斗衛星導航系統),美國的GPS等。ATGM336H包含32 個跟蹤通道可以同時接收六個衛星導航系統的GNSS 信號,并且實現聯合定位、導航與授時,具有體積小、高靈敏度、低功耗、低成本等優勢。而且具有配套的GPS 參數設置軟件GNSS 工具,可以直接在上位機上通過軟件來調整GPS模塊參數,使用起來很方便。ATGM336H 上配置有電池,支持冷啟動和熱啟動兩種模式,經實際測試,冷啟動定位時間約為36s,熱啟動約為3~5s。啟動時間較短,可以滿足定位需求。
在設計過程中,ATGM336H 采用3.3 V 供電,其中2 引腳TX 和3 引腳RX 以及11 引腳RF_IN 作為整個模塊的數據收發端口。由于需要選用共形微帶天線,此類天線為無源天線[10-11],而且搜尋裝置對定位精度要求較高,因此需要將定位模塊接線方法設計為無源接法。在RF_IN 口接入低噪聲放大器AT2659,低噪聲放大器可以放大天線信號,但是噪聲系數很低,有利于接收定位信息同時噪聲影響很小。定位模塊接線示意圖如圖2 所示。
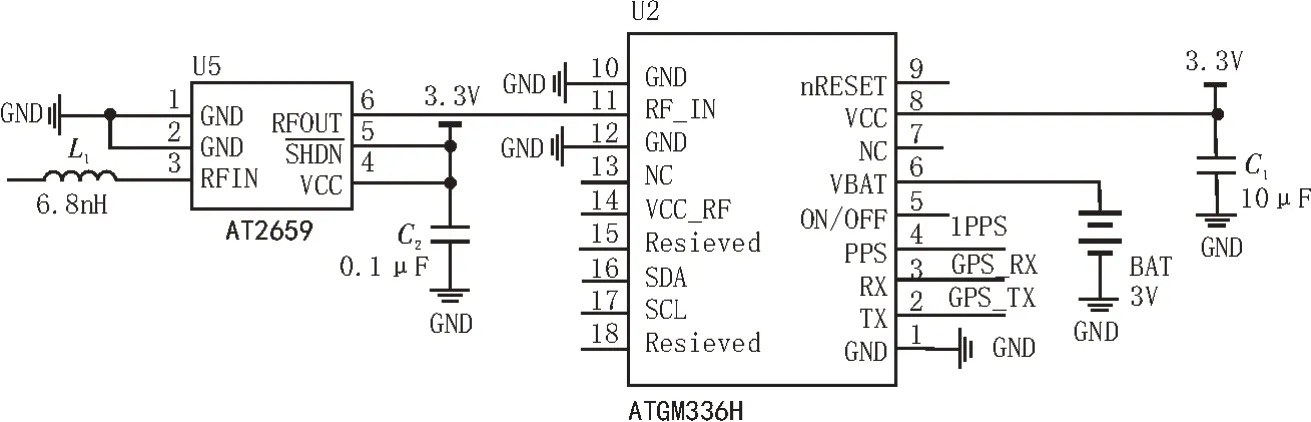
圖2 定位模塊接線示意圖
2.2 無線通信模塊
該文選用P900 模塊作為本設計的無線通信模塊。P900 模塊尺寸小,搭載在炮彈上具有較大的優勢。Microhard P900 OEM 模塊是一款工業級高性能無線串口通信模塊,支持多種通信模式。P900 工作頻率為902~928 MHz,采用調頻擴頻技術(FHSS)實現可靠的無線異步數據傳輸[12]。最大發射功率可達1 W,最大傳輸波特率可達到230.4 kbps。P900 模塊穩定可靠,速率高,延時低,數據通信安全性強,抗干擾能力強。P900 模塊目前在國內無人機,應急語音通信行業具有非常大的應用前景。在設計過程中,利用P900 模塊作為無線通信模塊,將定位信息傳遞給另一個P900 模塊,連接上位機讀取定位信息。在實際測量中,天線增益為6 dBi時,空速為276 480 bps、功率1 W 和波特率115 200 bps,一端置于高處,可視作無遮擋,傳輸距離可達到9~10 km。將幾種常用的無線通信模塊和該設計使用的P900 模塊進行對比[13],比較結果如表1 所示。P900 模塊作為收發一體機,利用一根天線,可以接收和發送數據。此通信方式為半雙工模式。在P900 模塊內部,搭載了射頻開關SKY13335-381LF,可以實現天線的分時復用。在通道選擇器的作用下,當發送數據時,VCTL1 端給高電平,VCTL2 端給低電平,通道1 接通,通道2 斷開,數據通過天線發送出去。在接收數據時,VCTL2給高電平,VCTL1 給低電平,通道2 接通,通道1 斷開,數據通過天線接收回來。
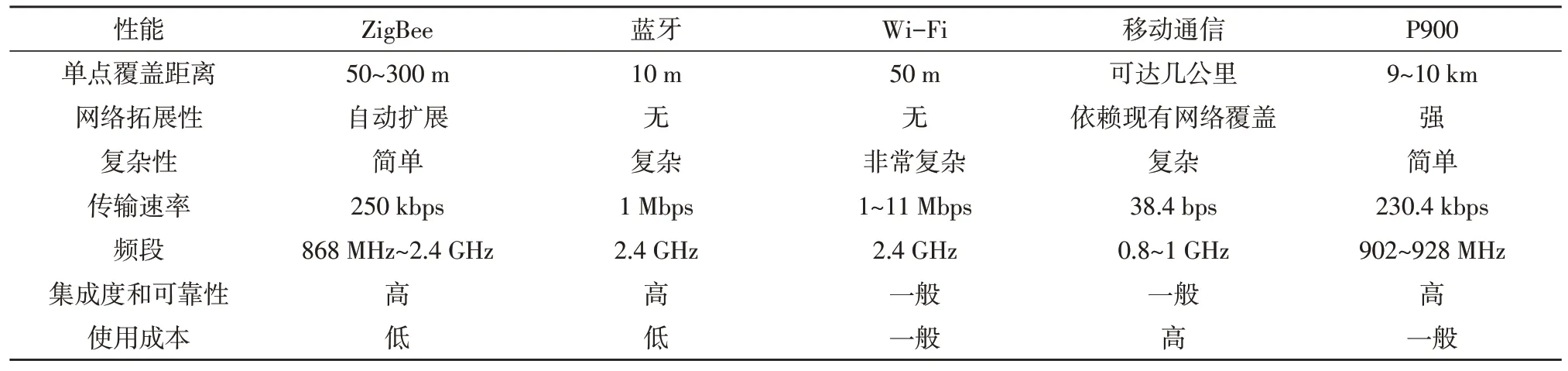
表1 無線通信模塊對比結果
在P900 模塊中,雖然傳輸距離較遠,但是炮彈落點范圍大,就需要對P900 模塊進行通信范圍的拓展,該設計選用通信組網模式。通信組網模式示意圖如圖3 所示。
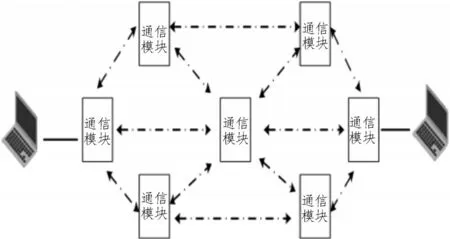
圖3 通信組網模式示意圖
利用MESH 組網模式,可以擴大通信范圍。每一個通信模塊都可以實現接收和發送數據。電腦端連接任意通信模塊都可以接收到數據。在整個通信結構中,不區分主站和從站,每一個模塊都是獨立的通信個體,只要在自己的信號接收范圍內都可以接收來自任意模塊發送來的數據。整個實驗過程中,在整個試驗場地布置好通信模塊,設置為組網模式,同時在導彈上攜帶一個通信模塊,導彈進入到組網布控的范圍內,就會發送定位信息,然后通過組網的通信傳遞到各個終端。
2.3 數據處理模塊
接收端主控部分選用Altera 公司的cycloneIV 系列的FPGA 芯片EP4CE10F17C8[14],它含有的邏輯單元數為10K,SDRAM 存儲器擁有256 Mbit 的資源,最高運行頻率166 MHz,并可通過邏輯實現直接驅動,功耗小、體積小、性價比高。它的主要功能是對從接收端的通信模塊傳輸來的數據進行接收、存儲、解析和提取,串口波特率設為9 600 bit/s。
2.4 天線
發射端的定位模塊和無線通信模塊需要天線進行接收以及發送數據,但是由于GPS 天線的工作頻段和P900 的工作頻段各不相同,所以需要不同的天線,為了減少體積,均選取微帶貼片天線。接收端僅有P900 模塊需要天線,選取工作頻段在900 MHz 的天線即可。定位模塊的天線選取微帶全向天線,繞著炮彈殼體貼一周,極大地減小了由于天線造成的體積過大和形狀不規則對炮彈飛行速度和落點的影響。同理,P900 模塊所需的天線同樣貼在炮彈殼體表面。
3 軟件設計
3.1 數據幀格式
在定位信息中,夾雜著很多不需要的信息,在傳輸信息的過程中,如果僅傳輸自己需要的信息,可以大大地減少傳輸量。在全部的GPS 類型信息中,需要提取出所需要的信息。GPS 信號通過串口以NMEA-0183 標準格式[15-17]輸出,NMEA-0183 通信協議提供六種數據格式,分別是GGA、GLL、GSA、GSV、RMC、VTG。為了獲得所需要的日期、時間、經度、緯度信息,且減少傳輸的數據量,該文選取RMC 格式。在RMC 格式中,第一個字段表示的是UTC 時間,即比北京時間晚8 h,順序按時分秒排列;第三個字段表示緯度的度數;第四個字段表示北緯還是南緯;第五個字段表示經度的度數;第六個字段表示東經還是西經;第九個字段表示UTC 的日期,其他的信息不重要,不予解釋。
3.2 數據解析
在發送端,通過配GPS 信息可以單獨選擇由RMC 格式輸出,這樣通過TX 和RX 端接口,可以將信息傳輸給P900 無線通信模塊后,由無線通信模塊將信息發送到接收端,接收端的通信模塊接收到信息并傳給主控芯片,然后進行數據解析,將解析后的數據顯示出來。定位數據的格式解析部分是程序設計的重點。在接收端接收到定位數據后,通過TX 和RX 傳輸到串口內,串口首先進行初始化,檢測串口是否打開,打開就檢測波特率是否一致,如果沒打開就重新返回檢測是否打開串口。波特率如果一致,就進行下一步監聽串口,如果不一致,返回上一步。監聽串口監聽到了數據,就檢測幀頭,如果沒監聽到數據,就繼續監聽。檢測到了幀頭,就進行解析數據,如果未檢測到幀頭,就繼續檢測。解析好的數據包括經度、緯度和時間信息。數據解析流程圖如圖4所示。
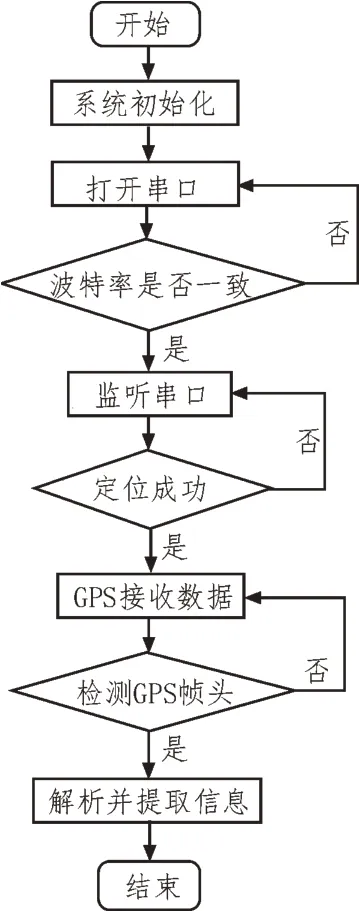
圖4 數據解析流程圖
4 系統測試
由于實驗條件有限,沒有進行實彈測試,選擇在學校內進行定點定位測試系統功能。在上位機端顯示的頁面如圖5 所示,表示無線通信模塊接收到數據后經過解析后的結果,可以清晰地給出日期、UTC時間、經度和緯度,一目了然地觀察到目標所在的位置信息。
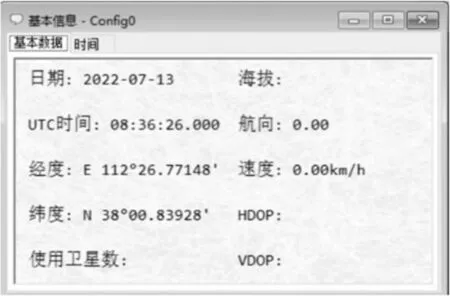
圖5 炮彈落點位置信息顯示頁面圖
無線通信模塊接收到的數據未解析的實驗結果如圖6 所示。在上方框內顯示的即為RMC 格式數據在ASCII 碼下的顯示結果,下方顯示的是RMC 格式數據在16 進制下顯示的結果。在ASCII 碼中,$GPRMC 轉換為16 進制表示成24 47 50 52 4D 43,此為識別的幀頭。根據第一個框中顯示083757.000,A,3800.83559,N,11226.77062,E 表示為現在的UTC時間為8 時37 分57 秒,定位為有效定位,緯度為北緯38.008 355 9°,經度為東經112.267 706 2°。第二個框中16 進制數表示的是現在的UTC 時間為8 時37分58秒,定位為有效定位,緯度為北緯38°008 355 6°,經度為東經112.267 706 3°。經兩次數據對比可以得知數據發送頻率為每秒1 次,滿足通信頻率要求。根據定位信息,就可以定位到炮彈所在位置。
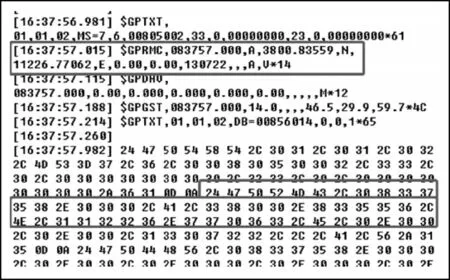
圖6 無線通信實驗結果圖
經過網絡查詢,學校內定點定位測試位置的經緯度信息為東經112.459 700 38°,北緯38.021 042 8°,與實際測得的東經112.267 706 3°,北緯38.008 355 6°誤差較小,符合定位精度要求,證明了該方法的可行性和正確性。在最終的設計結果中,發射端的體積僅為35×26×6 mm3,具有小型化的特點。同時,在正常通信過程中,發射端系統供電電壓為7.4 V,電流為0.33 A,計算的功耗僅有2.442 W,兼具了低功耗的特點。
5 結論
針對炮彈發射后落點的位置信息不能及時傳遞和炮彈無法快速回收的問題,設計了一種快速定位炮彈落點位置信息的信標機。該文所設計的信標機不僅能夠快速定位到位置信息,還能在飛行過程中實時傳遞位置信息。不受炮彈落點影響,操作方便,極大地提高了炮彈搜尋的精確度,快速地回收彈載記錄儀。并且該信標機設計以體積小、功耗低、成本低為特點,具有廣泛的實際應用價值和可行性。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
