電動汽車控制系統研究
2023-10-21 21:47:06賈瑞潘秉鈺王金鑫
時代汽車 2023年18期
賈瑞 潘秉鈺 王金鑫
摘 要:隨著電動汽車控制技術和電子控制單元(ECU)的發展,如何優化車輛控制性能成為了決定電動汽車設計水平的關鍵。為了實現對系統內的車輛部件進行合理、協調的綜合控制,本文基于模塊化思想,通過構建分布式控制網絡,設計了純電動汽車控制系統的整體結構,對車輛控制器的工作原理和功能實現進行了分析,為純電動汽車的控制系統的性能評價提供了理論依據。
關鍵詞:電動汽車 車輛控制系統 整車控制器
1 引言
現代電動汽車的研究和開發是基于現代控制技術的理論,包括汽車技術、電機驅動技術、電力電子技術和儲能技術等。
電動汽車設計過程中需要解決的三大問題,分別是整車技術、電力驅動技術和能源管理技術。其中,整車技術包括兩個方面:一是車身技術,主要是通過減輕電動汽車車身重量,實現加速和爬坡能力提升,有效增加行駛距離;二是整車控制系統集成控制技術,主要是對電動汽車的電子控制單元進行合理布置和協調,節省材料和降低成本,實現系統在控制過程中的優化,提高車輛性能[1]。
在傳統燃油汽車中,發動機管理系統控制發動機在滿足排放法規的前提下,提高燃油經濟性和駕駛性能;對于純電動汽車,動力電池代替燃油作為動力來源,取代了原有的發動機,因此,純電動汽車還需要一個車輛控制系統優化能量的分配以提高行駛里程。而車輛控制系統對車輛行駛性能有著重要影響,是純電動汽車控制技術研究的重要內容[2]。
2 系統設計需求分析
純電動汽車控制系統集成了包括電機、變流器、動力電池、變速器等在內的各種電控設備,是一個集電氣、電子、機械、化學等于一體的非線性動態系統。因此,無論電動汽車的其他裝配性能如何,即使都處于良好狀態、一旦整車控制器出現問題,車輛將無法正常運行,無法實現能量回收控制,甚至發生事故。如何協調各部分功能單元,使之合理、高效地工作成為純電動汽車控制系統設計的一個非常棘手的問題。
基于國內外車輛控制系統的研究現狀,針對車輛控制技術發展過程中存在的一些問題,本文構建了車輛控制系統的整體框架,對車輛控制器的工作原理進行了分析,最終確定了其功能。
3 車輛控制網絡架構
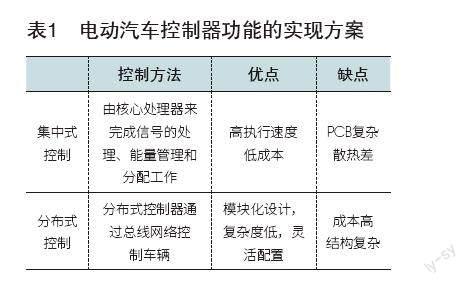
一般來說,純電動汽車控制器的功能實現方案有兩種:集中式控制和分布式控制,如表1所示。
由于CAN總線越來越多地應用于分布式控制系統,結合表1提供的兩種控制方案的分析,本研究采用了基于CAN總線的分布式控制系統。
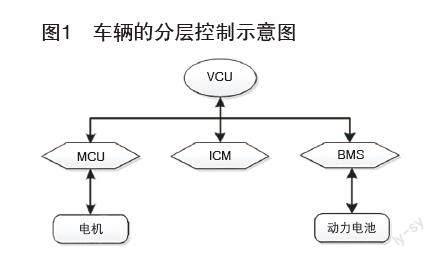
基于模塊化結構的分布式控制系統可提高車輛各子系統之間的關聯性。該系統可分為兩層:整車控制器和二級控制器。如圖1所示,其中,整車控制器(VCU)作為處理信息和發布指令的頂層,二級控制器中的電機控制器(MCU)、車輛組合儀表(ICM)和電池管理系統(BMS)對各自的控制對象進行管理和監控。各級實時狀態參數子系統將采集到的信息通過CAN總線實現共享交換給VCU,再由VCU進行信息綜合,在各級控制器之間實現集中與分散的控制功能、信息交互功能[3-4]。
4 電動汽車控制系統概述
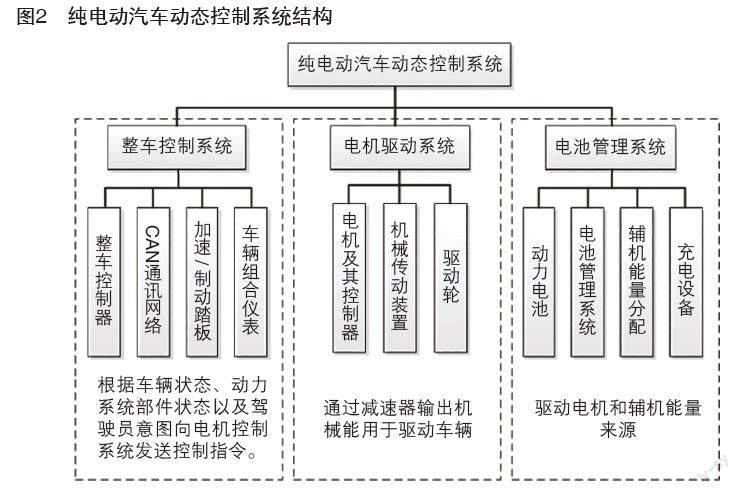
純電動汽車動態控制系統可分為三部分,分別為車輛控制系統、電機驅動系統和電池管理系統,如圖2所示。整車控制器作為衡量車輛控制系統性能和功能水平的車輛控制系統核心部件,其功能實現程度直接影響整車控制系統的控制效果[5]。
車載控制器作為純電動汽車控制系統中最重要的核心部分,負責整體控制、協調和監控車輛的運行狀態,將總線信號和傳感器信號通過控制策略,傳遞給二級電子控制單元,實現能量管理、故障診斷和對車輛運行狀態的控制、監控等功能,并通過液晶汽車儀表顯示。車輛控制器架構如圖3所示。
5 整車控制系統的工作原理
車輛控制系統是一個閉環控制系統,按執行任務的層次可分為三層:駕駛員意圖層,根據駕駛員駕駛需要,將油門踏板、剎車踏板、擋位等發送給整車控制器;協調層,根據車輛控制器處理的實時狀態信息和控制指令對駕駛員的操作企圖進行合理判斷;執行層,處理由車輛控制器做出的相關控制指令。為了提高整車控制系統的安全穩定性,要依靠系統的控制誤差進行反饋修正。圖4展示了整車控制器的工作原理。
純電動汽車的充電是通過地面上的充電設備完成的,當駕駛員使用鑰匙啟動開關時,動力電池通過DC/DC轉換為輔助電源,為儀表和照明等低壓電器設備提供能量。同時,通過動力電池向電機控制器供電,逆變器將直流電壓轉換為三相交流電供電機運行,然后經過變速器、旋轉軸、差速器和后橋驅動車輛。整車控制器通過控制驅動電機實現前進或后退[6]。
當車輛啟動時,駕駛員首先將擋位選擇在 “前進”或“后退”位置,然后踩下加速踏板。當加速踏板離開初始位置后,駕駛員可以通過改變加速踏板的開度來完成行駛扭矩的給定值變化。VCU采集到該信號,經過扭矩管理后發送給電機控制器。當電機控制器收到控制信號和驅動力矩給定值時,控制其運行,能量流向電機,并根據控制信號確定電機的旋轉方向,同時根據給定值確定電機的轉速,根據驅動轉矩信號給定值來確定電機的轉矩。
純電動汽車的制動方式分為兩種:緊急制動和應急制動。前者一般依靠機械制動系統進行制動;后者通常由機械制動和電機再生制動組成。當需要使用較小的制動強度時,制動系統將以再生制動為主,機械制動為輔;當二級制動強度時,制動系統將以機械制動為主,再生制動為輔。
當駕駛員踩下制動踏板制動,制動踏板偏離初始位置時,VCU采集到該信號,經過扭矩管理后發送給電機控制器。電機控制器會結合控制信號、制動水平和制動力矩給定值三個指標來控制電機的制動狀態功率,并根據制動力矩給定值信號來確定電機輸出制動力矩的大小,同時開啟再生制動,給動力電池供電。當抬起制動踏板時,制動狀態信號消失,制動力矩給定值也恢復為零,這時電機控制器停止制動力矩的輸出。當車輛在減速模式下運行時,電機作為發電機將機械能轉換為化學能為電池供電,以增加純電動汽車的續航里程。
6 整車控制系統的主要功能
整車控制器作為純電動汽車的核心控制器,對車輛的運行管理和各相關ECU的控制起著至關重要的作用。由于電控單元對各部分的控制功能不同,原來復雜的控制系統可以分解成相對簡單的單個子系統,然后基于模塊化思想明確每個模塊可以實現的功能。
一方面,它通過傳感器接收駕駛員傳輸的駕駛意圖數據和指令,并按照控制策略進行處理和分析,然后向電機控制單元、電池管理系統和汽車儀表盤控制單元發送控制指令,同時對車輛運行狀態進行實時監控;另一方面,在純電動汽車制動過程中對制動能量進行回饋控制,進而提高純電動汽車的續航里程。車輛控制器的電子控制單元利用CAN總線和其他數據信息來傳遞控制指令。車輛控制器被視為車輛通信網絡的中心節點,以提高數據傳輸率和可靠性。
該車輛控制器實現的主要功能有:
(1)驅動力矩控制
驅動力矩的控制,作為整車控制器最基本、最重要的功能,通過收集踏板信息,然后解析駕駛員的操作意圖,實現對電機輸出力矩需求的計算。在這個過程中,駕駛員通過操縱油門或制動踏板來實現信號輸入,也就是將駕駛員的操作目的以信號的形式傳遞給整車控制器,然后通過分析處理后由機動車控制器根據駕駛員的心理意圖輸出驅動力矩或制動力矩。
(2)制動能量優化控制
純電動汽車與傳統汽車相比,主要區別之一是制動能量的回收。電機作為唯一的動力輸出并具有電機和發電機兩種功能——當駕駛員踩下油門踏板驅動車輛時,電機的功能相當于電動機;相反,當駕駛員踩下制動踏板減速行駛時,電機的功能相當于發電機,也就是利用電動汽車的制動能量發電并儲存到儲能裝置中,當滿足一定條件時,又將能量輸送到電池組中。在這個過程中,車輛控制器根據加速踏板開度、制動踏板開度、當前速度以及動力電池的荷電狀態(SOC)來確定是否在某一時刻回收制動能量,提高能量利用效率。
(3)車輛能量管理
在純電動汽車發展過程中,動力電池除了向驅動系統供電外,還向轉向電機、空調等汽車電氣設備供電。為了延長續航里程,整車控制器可以對能源進行合理的優化,當電池電量不足時,發出關閉部分輔助電器設備的控制指令,從而保證車輛用電的安全性,進而提高能源利用率。
(4)CAN網絡的維護和管理
整車控制器作為通信網絡的主節點,同時也對車載網絡進行管理,該通信網絡基于CAN總線技術,擁有多個主從節點,對車載網絡狀態進行實時調節,并具有信息動態分配的優先權。
(5) 故障診斷與處理
整車控制器可以連續實時監測車輛運行狀態,包括各部件ECU的工作情況,一旦電子控制單元出現故障首先及時報警,在采取安全措施的同時,再進行故障診斷,存儲并發送錯誤代碼,為以后的汽車維修和日常檢查提供依據,最后對故障問題進行分類處理,并對那些不影響車輛運行的故障進行處理,以維持車輛的正常行駛。
(6)車輛狀況監測
整車控制器基于車載儀表顯示車輛的實時運行狀態信息,使駕駛員了解車輛狀態。車況監測技術基于CAN總線通信對電機轉速、車速、電池剩余電量、電流等運行狀態參數進行監測,并將上述數據通過車載儀表盤直觀顯示,提高了駕駛員與車輛之間的互動性,同時為駕駛員準確掌握車輛整體運行狀況提供便利條件。
7 總結
純電動汽車整車控制器作為整車控制系統的核心部件,對汽車的移動、制動能量優化、能量管理、CAN網絡的維護和管理、故障診斷和處理、車況監測等功能的實現程度起著關鍵作用。本文首先介紹了純電動汽車控制網絡的構成,以及分布式控制系統的確定,然后通過整車控制器原理圖概述了其系統結構,再詳細介紹了整車控制器的工作原理,最后提出了整車控制器所能實現的功能,為進一步研究開發和性能評估提供理論依據。
參考文獻:
[1]張翔.純電動汽車整車控制器進展[J] 汽車電器,2011,(2):1.
[2]王貴明等.電動汽車及其性能優化[M].北京:機械工業出版社,2010:15-19.
[3]冉振亞,韓兆運.基于CAN總線的電動汽車控制系統設計[J].汽車工程,2006(03).
[4]劉永剛.基于CAN總線的電動汽車控制系統的研究[J].科學中國人,2016(12).
[5]章菊等.純電動汽車性能綜合評價方法研究[J].汽車零部件,2020(03).
[6]宋曉妍.純電動城市客車整車控制器的設計與開發[D].長安大學.