混合動力AMT 自學習控制算法研究
2023-10-25 02:48:22喬運乾孫立鵬翟靈瑞
汽車電器 2023年10期
張 椿, 喬運乾, 孫立鵬, 翟靈瑞, 張 帥
(濰柴動力股份有限公司, 山東 濰坊 261000)
節(jié)能與環(huán)保已經(jīng)成為汽車技術發(fā)展的兩大主題,混合動力汽車作為一種清潔能源汽車已經(jīng)成為汽車發(fā)展的主要方向[1]。AMT系統(tǒng)以電控發(fā)動機、離合器系統(tǒng)、電機系統(tǒng)和雙中間軸變速器組成的動力傳動系統(tǒng)為基礎,為保證整車動力性、經(jīng)濟性和換擋平順性為目標,采用電控氣動的選換擋執(zhí)行機構,利用CAN通信技術對發(fā)動機或電機進行控制以實現(xiàn)調(diào)節(jié)變速器輸入軸的轉(zhuǎn)速要求,完成離合器的自動控制和變速器的自動換擋[2]。
混合動力車輛在使用過程中,隨著離合器分離、結(jié)合次數(shù)的增加,導致離合器摩擦片會逐漸磨損,出現(xiàn)分離、結(jié)合不完全等現(xiàn)象;變速器在使用過程中,由于換擋次數(shù)的增加以及執(zhí)行機構的磨損等原因,可能造成某些擋位掛不上的現(xiàn)象發(fā)生[3-4]。本文基于TTC200控制器,通過對離合器、變速器進行自學習,保證整個AMT系統(tǒng)正常工作。
1 混合動力AMT及其控制器TCU介紹
TCU控制軟件的載體是通過TTC200控制器實現(xiàn)的,該控制器的外形、系統(tǒng)特性和IO端口定義如圖1所示。輸入軸轉(zhuǎn)速傳感器和輸出軸轉(zhuǎn)速傳感器、換擋手柄單元、選換擋執(zhí)行機構、離合器執(zhí)行機構和取力器控制單元等相關電磁閥和傳感器分別接入TCU控制器中。

圖1 TTC200控制器外形圖
混合動力AMT是在變速器基礎上增加選換擋執(zhí)行機構、離合器執(zhí)行機構和輸入動力電機,布置簡圖如圖2所示。
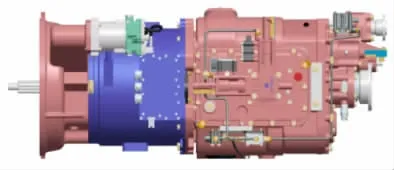
圖2 動力系統(tǒng)布置簡圖
2 TCU自學習功能控制策略
TCU自學習功能是基于MATLAB/SIMULINK模型,通過快速原型技術,二進制代碼由內(nèi)嵌的編譯器自動生成。離合器自學習流程圖、模型如圖3、圖4所示,且該模型通過MIL、HIL測試驗證。與之類似,變速器自學習流程圖如圖5所示。

圖3 離合器自學習流程簡圖

圖4 離合器自學習模型
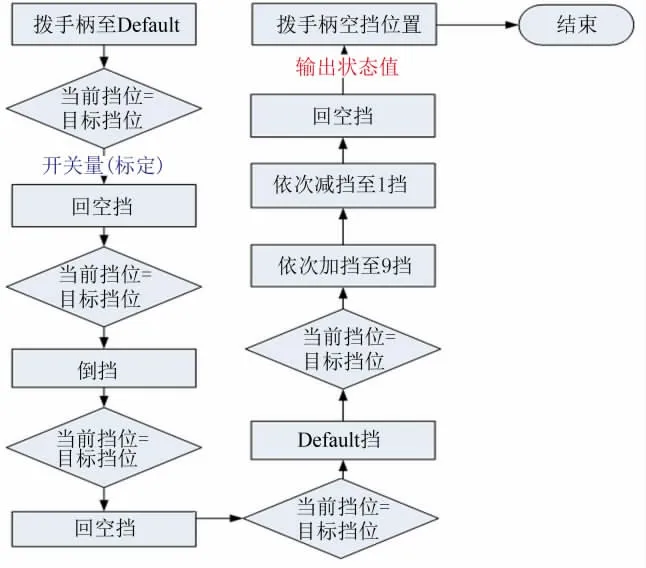
圖5 變速器自學習流程簡圖
3 TCU自學習功能實車驗證
借助某公司混合動力公交車對AMT自學習控制進行實車驗證。
3.1 離合器自學習功能驗證
離合器自學習操作步驟如下:將離合器自學習開關打開,等待約30s后將鑰匙打至OFF狀態(tài),大約6~9s后整車再次上低壓電,將鑰匙擰至ON狀態(tài),完成離合器自學習過程。通過INCA記錄數(shù)據(jù)并進行分析,如圖6所示。當整車再次上低壓電后,TCU工作狀態(tài)變?yōu)?,同時EEPROM中輸出離合器結(jié)合設定點、分離設定點、滑摩點的位置值如下所示:分離設定點2577mV,結(jié)合設定點1658mV,滑摩點1931mV。
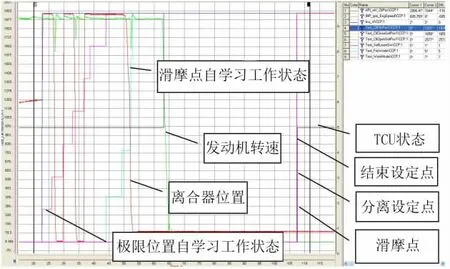
圖6 離合器自學習過程
3.2 變速器自學習功能驗證
變速器自學習操作步驟如下:在車輛處于駐車狀態(tài)、正常上下高壓電情況下,撥手柄至Default位置,按下變速器自學習開關,變速器按照圖5進行各個擋位的自學習,具體過程如圖7所示,自學習后EEPROM中輸出各選換擋位置如表1所示。
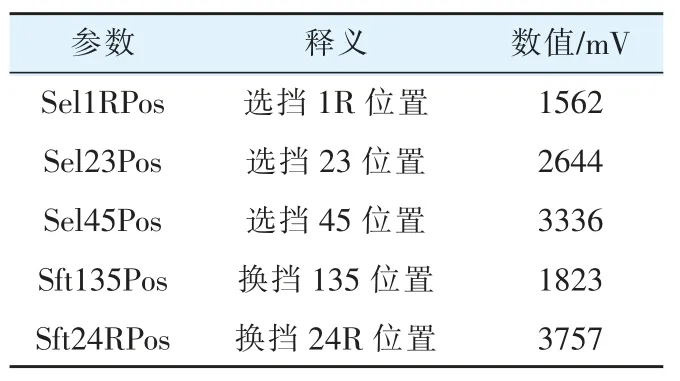
表1 選換擋位置數(shù)據(jù)

圖7 變速器自學習過程
3.3 離合器、變速器動作次數(shù)功能
對離合器的分離結(jié)合次數(shù)、選換擋次數(shù)等進行統(tǒng)計,并通過CAN線廣播出去,如圖8所示,對于分析動作次數(shù)對執(zhí)行機構壽命有一定的借鑒作用。
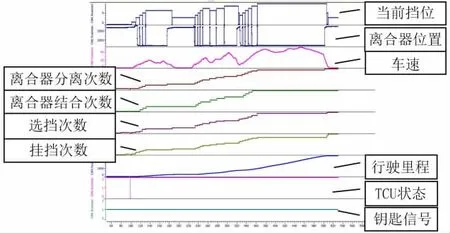
圖8 離合器和變速器工作實測結(jié)果
4 結(jié)論
本文借助TTC200控制器實現(xiàn)AMT自學習功能,自動適應離合器、變速器關鍵位置的變化,保證整個AMT系統(tǒng)正常工作,并對離合器動作次數(shù)、換擋次數(shù)、行駛里程等進行統(tǒng)計,便于分析執(zhí)行機構動作次數(shù)對整個生命周期的影響。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
